基于机器视觉与运动控制的蓝光激光头全自动倾斜调整系统的设计
微操作机器人的视觉伺服控制
机器人 ΡΟΒΟΤ
∂
文章编号
2
22
微操作机器人的视觉伺服控制Ξ
赵 玮 宗光华 毕树生
北京航空航天大学 机器人研究所
摘 要 视觉伺服控制是微操作机器人实现精确运动 完成自动操作的必要手段 本文介绍了实现微操作机器
人视觉伺服控制的方法 首先论述了微操作机器人的视觉伺服结构 并以建立的面向生物工程的双手微操作机器人
的推移 机构结构参数会发生微小变化 进而导致运 动模型发生变化 为了方便使用 微动机构经常采用 简化的运动学模型 以及经常更换操作工具 如在一 次细胞操作中需多次更换注射针 都会导致运动模 型不准确 为补偿这一误差 视觉伺服控制是一个好 的选择 同时 视觉系统为微操作提供了必不可少的 微观世界的观察手段
2 微操作机器人的视觉伺服结构 Τηε ϖισυ−
αλ σερϖοινγ αρχηιτεχτυρε συιταβλε φορ μ ι− χρομ ανιπυλατορ
按照文献≈ 中的分类法 对于微操作机器人系 统 适于采用基于图像的动态 2 2 √ 的视觉 伺服控制结构 对于基于光学显微镜的微视觉系统 摄像机只能固定安装在显微镜上 无法安装在机构 末端执行器上 可以同时观察到目标对象和末端执 行器 因此只能是末端点闭环 ∞≤ 系统
对于图 所示的视觉伺服结构 机器人运动学 建模的目标是确定关节空间与图像特征空间之间的 变换关系 这一关系可用式 表示
φα ϑΛα
其中 φ 为图像特征向量 φα为其对时间的变化率 Λ 为关节变量向量 Λα为关节速度向量 ϑ 为视觉伺服 的机器人系统的雅可比矩阵 它是图像雅可比矩阵 与机器人运动学雅可比矩阵的组合
中图分类号 × °
文献标识码
ς ΙΣΥ ΑΛ ΣΕ Ρ ς Ο ΧΟΝΤΡ ΟΛ ΟΦ Ρ ΟΒΟΤΙΧ Μ ΙΧΡ ΟΜ ΑΝΙΠΥ ΛΑΤΟΡ
基于机器视觉的汽车前照灯照射角度调整算法
基于机器视觉的汽车前照灯照射角度调整算法随着汽车智能化的发展,基于机器视觉的汽车前照灯照射角度调整算法也越来越受到关注。
这种算法可以根据路况、车速、车辆间距等信息来自动调整照射角度,提高行车安全性和驾驶舒适性。
本文将介绍基于机器视觉的汽车前照灯照射角度调整算法的原理、方法及其应用前景。
一、算法原理与方法1.1 算法原理基于机器视觉的汽车前照灯照射角度调整算法是通过分析前方道路的图像信息,利用图像识别和处理技术,自动调整照射角度,使前照灯能够更好地照亮前方道路。
1.2 算法方法针对基于机器视觉的汽车前照灯照射角度调整算法,目前主要采用以下两种方法:(1)基于物体检测的方法:通过识别前方道路上的物体,如交通标志、行人、车辆等,确定合适的照射角度。
例如,当前方有行人横过马路时,系统会自动调整照射角度,避免照射到行人的眼睛,保证行人的安全。
(2)基于路况分析的方法:通过分析前方道路的路况信息,如道路弯曲程度、坡度等,确定合适的照射角度。
例如,当前方是一段弯道时,系统会自动调整照射角度,使前照灯能够更好地照亮弯道,提高驾驶安全性。
二、算法应用前景基于机器视觉的汽车前照灯照射角度调整算法在汽车安全领域具有广阔的应用前景。
以下列举几个具体的应用场景:2.1 夜间驾驶安全性提升夜间驾驶是一项困难且危险的任务,因为夜间视野较差,容易发生事故。
基于机器视觉的汽车前照灯照射角度调整算法可以根据路况和前方道路情况来自动调整照射角度,确保驾驶者能够看清前方道路,提高夜间驾驶的安全性。
2.2 增强驾驶舒适性在颠簸路段或者经过坡度较大的路段,如果前照灯的照射角度不合适,会造成驾驶者的视觉疲劳和不适感。
基于机器视觉的汽车前照灯照射角度调整算法可以根据路况自动调整照射角度,减少驾驶者的不适感,提高驾驶舒适性。
2.3 节能环保汽车前照灯通常使用高亮度的氙气灯或LED灯,而过高或过低的照射角度都会浪费能源。
基于机器视觉的汽车前照灯照射角度调整算法可以根据道路情况自动调整照射角度,减少能源的浪费,实现节能环保。
基于机器视觉的摇头电脑灯智能调焦方法与设计方案
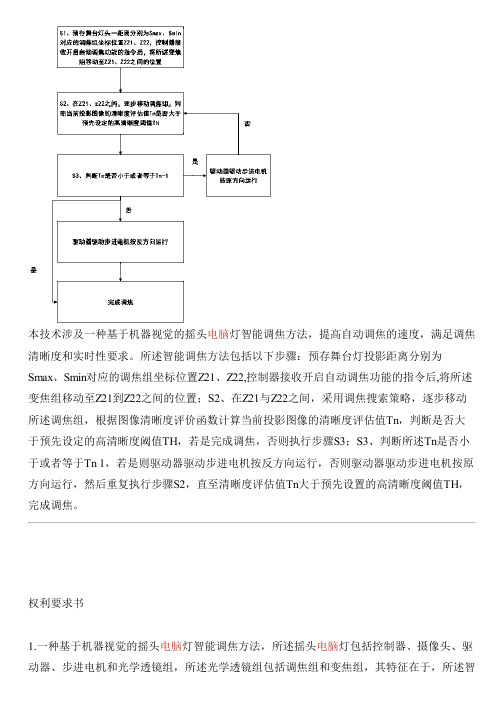
本技术涉及一种基于机器视觉的摇头电脑灯智能调焦方法,提高自动调焦的速度,满足调焦清晰度和实时性要求。
所述智能调焦方法包括以下步骤:预存舞台灯投影距离分别为Smax、Smin对应的调焦组坐标位置Z21、Z22,控制器接收开启自动调焦功能的指令后,将所述变焦组移动至Z21到Z22之间的位置;S2、在Z21与Z22之间,采用调焦搜索策略,逐步移动所述调焦组,根据图像清晰度评价函数计算当前投影图像的清晰度评估值Tn,判断是否大于预先设定的高清晰度阈值TH,若是完成调焦,否则执行步骤S3;S3、判断所述Tn是否小于或者等于Tn1,若是则驱动器驱动步进电机按反方向运行,否则驱动器驱动步进电机按原方向运行,然后重复执行步骤S2,直至清晰度评估值Tn大于预先设置的高清晰度阈值TH,完成调焦。
权利要求书1.一种基于机器视觉的摇头电脑灯智能调焦方法,所述摇头电脑灯包括控制器、摄像头、驱动器、步进电机和光学透镜组,所述光学透镜组包括调焦组和变焦组,其特征在于,所述智能调焦方法包括以下步骤:S1、预存舞台灯投影距离分别为Smax、Smin对应的调焦组坐标位置Z21、Z22,控制器接收开启自动调焦功能的指令后,将所述变焦组移动至Z21到Z22之间的位置;S2、在Z21与Z22之间,采用调焦搜索策略,逐步移动所述调焦组,根据图像清晰度评价函数计算当前投影图像的清晰度评估值Tn,判断Tn是否大于预先设定的高清晰度阈值TH,若是完成调焦,否则执行步骤S3;S3、判断所述Tn是否小于或者等于Tn-1,若是则驱动器驱动步进电机按反方向运行,否则驱动器驱动步进电机按原方向运行,然后重复执行步骤S2,直至清晰度评估值Tn大于预先设置的高清晰度阈值TH,完成调焦。
2.根据权利要求1所述的一种基于机器视觉的摇头电脑灯智能调焦方法,其特征在于,所述步骤S1还包括:S11、获取控制器接收开启自动调焦功能指令时,变焦组在摇头电脑灯内的坐标位置Z1,并计算得到调焦组对应的坐标位置Z2,驱动器驱动步进电机将调焦组定位到坐标位置Z2;S12、控制器获取当前投影图像数据,根据图像清晰度评价函数计算当前投影图像的清晰度评估值Tn。
机器视觉技术工程应用案例简介
自主研发的开放式数控系统(1)
第23页/共28页
自主研发的开放式数控系统(2)
机器视觉应用往往与运动控制技术相关联,因此,现简单介绍一下我们自主研 发的开放式数控系统。
1. 开放式专用数控系统主要特点 (1)开放性:允许第三方做二次开发,订制特殊功能; (2)嵌入式:基于ARM或DSP,降低成本,增加可靠性; (3)运动控制:步进电机与伺服电机接口; (4)逻辑控制:PLC或MPC功能; (5)通信能力:有现场总线通信与以太网通信功能; (6)机器视觉信号接口:以太网口。 2. 开放式专用数控系统主要技术指标 (1)控制轴数:16轴,联动轴数:3轴; (2)直线插补、圆弧插补、螺旋线插补、NURBS插补、回零、急停等运动
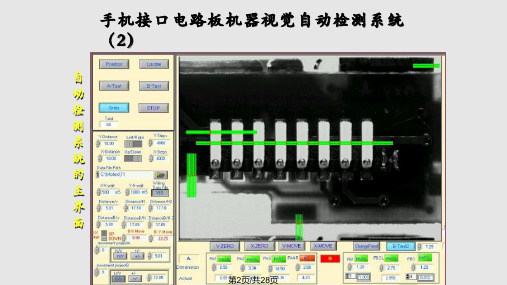
该系统采用自主开发的智 能相机和数控子系统。
第16页/共28页
检测系统的人机界面之一
计算机辅助图案设计系统(1)
第17页/共28页
计算机辅助图案设计系统(2)
该系统用于绗缝设备和激光打标/切割设备的图案设计, 其主要功能有: 1. 图像采集:通过数字摄像头连续采集花纹图案的图像,再 通
过图像采集卡将图像传送到计算机内。 2. 摄像头参数设置与调整功能:用户可根据实际情况通过人 机
中; 6. 如果进料盒中的器件还未取完,就回到第一道工序重复上述的流程。 7. 进料盒取空或出料盒满的话,设备暂停,人工方式更换进料盒或出料
盒。
第11页/共28页
高速卷簧机技术改造中的机器视觉应用(1)
测 试 工 作 现 场 的 图 片
第12页/共28页
高速卷簧机技术改造中的机器视觉应用(2)
—推杆与送线轮运动特征测量
机器视觉弹簧机械性能自动检测系统 (1)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于机器视觉与运动控制的蓝光激光头全自动倾斜调整系统的设计
蓝光激光头精细位置调节存有问题,论文为解决上述问题,首先使用机器视觉技术,捕捉到蓝光光斑区域,针对光斑及水平间差距做出分析,在精确且具体的2轴运动控制协助下,达到激光头平面水平放置的效果;紧接着明确光斑焦距,并分析所在区域,考虑到3轴精细运动联动实际情况,找到激光头空间区域,同时还包括焦距所处区域,继而全自动倾斜调整蓝光激光头,改良了蓝光激光头模块产品,达标率超过98%。
【Abstract】There is a problem in blue ray laser head fine position adjustment,to solve the above problem,the paper firstly uses machine vision technology to capture the blue light spot area,analyzes the spot and horizontal gap,it achieved laser head level laying in horizontal placement with the control assistance of accurate and specific 2-axis motion,clear spot focal length,and analyze the area,taking into account the actual situation of 3-axis fine motion linkage,find the laser head space area,also include the area of focal length,then automatically tilt adjust blu-ray laser head,to improve blu-ray laser head module products,the compliance rate is more than 98%.
标签:机器视觉;运动控制;蓝光激光头
1 引言
光碟生产商Singulus2013年9月13日宣称:“用于存储4K内容、容量为100GB的蓝光光碟已经问世”。
数字式光盘的优点突出,存储容量大,速度快,且生命周期长,改变了以往包括硬盘及磁带等为存储记录的媒体形式,得到大范围应用。
对于信息其是借助光学激光头来开展写入及读出工作的,其中,蓝光光学头构成了高清信息读取不可缺少的部件,其性能所起作用较大,较大程度上影响了光盘存储器性能优劣。
在蓝光光学头性能许多调整及检测工作中,尤以倾斜调整检测最为突出,确保了光盘信号的读取无误,国内生产着世界范围内最大量的光盘产品,光盘产业构成了我国信息产业十分必要的环节[1]。
上述倾斜调整检查设备的研发商均是外国厂家,成本价格较贵,对国内光盘产业整体发展无益,使得光学头生产企业受制于国外技术设备,所以,考虑到上述情况,进行本次研究,旨在分析基于机器视觉与运动控制的蓝光激光头全自动倾斜调整系统的设计。
2 总体设计基于机器视觉与运动控制的蓝光激光头全自动倾斜调整系统
蓝光激光头全自动倾斜调整系统研发涵盖了多个层面内容,包括CCD机器视觉光斑定位与焦距调节设计及多轴运动控制伺服系统等,这种检测设备具有全自动化且精细的特点[2]。
这种系统硬件以机械机构及计算机为主要构成部分,机械机构组成部分包括电机、传感器及气动装置等;计算机处置机器视觉图像,精细化调控多轴运动,且对焊接装置及气动装置实施调控。
3 设计基于机器视觉与运动控制的机电平台
机电平台为光路系统、气动装置及电机等提供安装场所;机械自动焊接动作及伺服系统应用、搭建硬件场所,以应用计算机视觉。
为容易区分特征,设计的机器视觉照明负责让被测物的特征与背景图像特征间获得最大对比度,指导CCD机器视觉对传统光电传感器检测光路方案进行有效替代[3]。
该设计涵盖光路系统两路,一路为光斑定位光路系统,另一路为光斑变焦光。
4 设计基于机器视觉与运动控制的CCD机器视觉光斑定位与焦距调节
CCD,电荷耦合元件(Charge-coupled Device),称之为CCD图像传感器,或图像控制器,属于半导体器件,转化光学影像,变成电信号。
检测DVD的激光头角度是否合格,方法是使光头发光,使其投射在1m外的靶上,如果光点落在靶心一定区域外,次光头为不良,需要调整。
此时需要检测光点的位置,并判断是否在良品区。
借助光路系统,图像采集卡能转换CCD拍摄激光光斑图像,变成数字图像,以图像预处理方式,将CCD光斑信号中噪音及保持光斑特点去除。
使用光斑图像中一阶炬方法来计算光斑质心[4]。
使用圆度检测方法计算光斑位置及其半径。
光斑定位位置及其光斑自动变焦精確移动,准确调控多项工作,如自动焊接等,应控制电机运动,以总体设计为参照发现,伺服电机8个需要被控制,各电机及运动控制卡衔接起来。
光斑移动动作,要借助各电机间协调来实现,通过图像识别及坐标体系转换来实现对位移的控制,尤其变焦时,应同时协调三轴,且同步分析图像处理,最终在指定区域内,让最佳机器视觉协调运动控制来运作,使蓝光激光模块的倾斜检测及调整成为可能,完全能够自动化操作。
如,通过控制模组进行镜头的前后移动,从而达到调整镜头焦距的目的,有效调焦距行程。
相比原本每人每天良品率为86%,其中406件产品中良品数量348件;使用这种系统后,每人每天良品率为98%,其中,1000件产品中良品数量980件;一人能够操作两台设备,降低了人力消耗,高效生产,提升产品良好率;对比人工作业产量,良好率超过98%,提升30%生产效率[5]。
激光头构成影碟机与激光唱机不可缺少环节,其中,激光二极管为激光头重要组件。
以激光二极管开始,分析激光头的原理与调整。
把握激光头工作原理,引导影碟机及激光唱机的工作,协助激光头维修及更换、调整等。
激光头主要由激光产生(发射)系统、激光传播系统(光路或激光枪)与光接收系统等部分构成,激光头中的半导体激光二极管发射出单一波长、相位一致的激光,衍射光栅为激光产生系统的一种,分裂激光二极管发射的单束光,成为三束光。
激光枪(或称为光路),激光传播路径中固定有起不同作用的光学镜片。
由分光、14/波长片、准直透镜和物镜构成入射(相对于光盘)光传播路径,将激光二极管发射出的激光入射到光盘面上;反射光路径包括物镜、准直透镜、1/4波长片、分光棱镜和圆柱透镜,引入光盘反射回来的激光,至光敏接收器光靶上。
准直透镜(或称平行透镜),矫正散射入射光,变成平行光。
物镜构成光学系统不可或缺零件,聚焦入射平行光,变成极小光点早期构成为3片玻璃球面。
1/4波长片为一个旋光器件,可旋转偏光轴4 5度。
分光棱镜(半透镜),能分开偏光轴不同的激光束,反射物镜送出反射回来
光,透射激光二极管发射出的光。
5 结语
机器视觉从人工智能发展出来,从简单层面上看,机器视觉通过机器代替人眼来进行测量及判断。
转换摄取目标,变成图像信号,传至专门图像处理系统,获得被摄目标形态信息,变成数字化信号;运算上述信号,实现对现场设备控制的目的。
运动控制(MC)属于自动化,一般被称之为伺服机构设备,线性執行机或者是电机来控制机器的位置和/或速度。
运动控制在机器人和数控机床的领域内的应用要比在专用机器中的应用更复杂。
运动控制普遍应用于包装及纺织中。
蓝光(Blu-ray),也被称之为蓝光盘(Blu-ray Disc,BD),通过较短波长(405nm)的蓝色激光实现数据的读和写。
针对基于机器视觉与运动控制的蓝光激光头全自动倾斜调整系统,先开展整体设计,紧接着具体设计机电平台、CCD机器视觉光斑定位与焦距调节。
从上文分析中不难发现,此项设计研究的进行,有利于指导蓝光激光头全自动倾斜调整系统设计工作较好地开展。
因为研究篇幅限制,其中相关研究不能面面俱到,有关研究仍需深入。
【参考文献】
【1】韩海生,柏原圭,张进京.蓝光存储——信息化的核心技术[J].中国信息界,2010(12):59-62.
【2】韦争亮,黄志斌,古耀达,等.基于机器视觉与运动控制的轨距尺检定器自动化检测技术研究[J].中国测试,2014,40(3):23-27.
【3】朱宝伟.机器视觉中的光源照明设计[J].电子科技,2013,26(3):80-82.
【4】夏爱利,马彩文.基于图像处理技术的光斑质心高精度测量[J].光电子·激光,2011(10):1542-1545.
【5】林盛鑫,钟惠球,黄丁香.基于机器视觉与运动控制的蓝光激光头全自动倾斜调整系统的设计[J].东莞理工学院学报,2015,22(5):23-26.。