单片机设计PWM三种方式
51系列单片机输出PWM的两种方法
51系列单片机输出PWM的两种方法PWM(Pulse Width Modulation,脉宽调制)是一种常用的调制技术,通过改变信号的脉宽来控制输出电平的占空比。
在51系列的单片机中,常用的PWM输出方式有基于定时/计数器和软件实现两种方法。
一、基于定时/计数器的PWM输出方法:在51系列单片机中,内部有多个定时/计数器可用于实现PWM输出。
这些定时/计数器包括可编程定时/计数器T0、T1、T2和看门狗定时器。
1.T0定时/计数器:T0定时/计数器是最简单和最常用的PWM输出方式之一、通过配置T0定时/计数器的工作模式和重装值来实现PWM输出。
具体步骤如下:(1)选择T0的工作模式:将定时/计数器T0设置为工作在16位定时器模式,并使能PWM输出。
(2)设置T0的重装值:通过设定T0的装载值来定义PWM输出的周期。
(3)设置T0的计数初值:通过设定T0的计数初值来定义PWM输出的脉宽。
(4)启动T0定时/计数器:开启T0定时/计数器的时钟源,使其开始计数。
2.T1定时/计数器:T1定时/计数器相对于T0定时/计数器来说更加灵活,它具有更多的工作模式和功能,可以实现更复杂的PWM输出。
与T0定时/计数器类似,通过配置T1的工作模式、装载值和计数初值来实现PWM输出。
3.T2定时/计数器:T2定时/计数器在51系列单片机中的应用较少,但也可以用于实现PWM输出。
与T0和T1不同,T2定时/计数器没有独立的PWM输出功能,需要结合外部中断请求(INT)来实现PWM输出。
二、软件实现PWM输出方法:在51系列单片机中,除了利用定时/计数器来实现PWM输出外,还可以通过软件来实现PWM输出。
软件实现PWM的核心思想是利用延时控制来生成不同占空比的方波信号。
软件实现PWM输出的步骤如下:(1)设置IO口:选择一个适合的IO口,将其设置为输出模式。
(2)生成PWM信号:根据要求的PWM占空比,通过控制IO口的高低电平和延时的时间来生成PWM方波信号。
PWM信号生成原理及在单片机控制中的应用

PWM信号生成原理及在单片机控制中的应用随着现代科技的迅猛发展,单片机成为了各类电子设备和系统中不可或缺的关键组件。
而PWM信号作为一种重要的数字信号,广泛应用于单片机控制中,它的产生原理以及在单片机控制中的应用,是我们需要深入了解和研究的。
一、PWM信号生成原理PWM信号是一种脉冲宽度调制信号,通过改变脉冲的宽度来模拟模拟量电压的变化。
PWM信号的产生原理主要通过改变脉冲的高电平时间和低电平时间来控制信号的平均电平值,从而实现对输出的调整。
在数字系统中,PWM信号的生成需要借助计时器和定时器。
单片机中的计时器/定时器模块可以发挥关键作用,产生高效、精确的PWM信号。
具体来说,使用计时器和定时器可以先设定一个固定的周期,然后在每个周期内,根据占空比的设定,分别设定高电平和低电平的持续时间。
通常,高电平时间和低电平时间之和即为一个周期的时间。
二、PWM信号在单片机控制中的应用1. 电机控制PWM信号在电机控制中得到广泛应用。
通过控制PWM信号的占空比,可以实现对电机转速的调节。
通过改变高电平时间和低电平时间的比例,可以实现不同的转速控制。
2. LED亮度控制PWM信号在LED亮度控制中也扮演着重要角色。
通过改变PWM信号的占空比,可以实现对LED灯的亮度调节,从而得到不同亮度的光效。
3. 温度控制PWM信号还可以用于温度控制。
通过控制PWM信号的占空比,可以调整加热元件的电源开关频率和工作时间,从而实现对温度的控制。
这种控制方式下,可以减少功耗,提高系统效率。
4. 声音输出PWM信号还可应用于音频处理。
通过改变PWM信号的频率和占空比,可以产生不同音高的声音。
利用PWM信号的高频特性,可以实现模拟音频信号的数字化。
5. 无线通信PWM信号还可以被用于无线通信中。
通过控制PWM信号的占空比和频率,可以产生数字调制信号,实现与无线通信模块的数据传输。
三、PWM信号控制方法1. 软件控制通过使用单片机的GPIO口,可以编写程序,实现对PWM信号的软件控制。
单片机指令的PWM输出与模拟信号生成
单片机指令的PWM输出与模拟信号生成单片机(Microcontroller)是一种集成电路芯片,内部包含有处理器核心、存储器和各种输入输出接口。
它们可以通过编程实现各种功能,包括模拟信号的生成和PWM(Pulse Width Modulation)输出。
PWM是一种调制技术,通过调整方波信号的占空比来控制输出信号的平均功率。
单片机可以通过改变PWM输出的占空比,实现对电机速度、LED亮度等设备进行精确控制。
本文将介绍单片机指令中PWM 输出与模拟信号生成的原理和应用。
一、PWM的原理与工作原理PWM技术通过改变信号的高电平和低电平持续的时间比例来实现对输出信号的控制。
调整占空比可以改变输出信号的功率。
PWM信号由一个恒定频率的方波信号和一个占空比可变的调制信号组成。
单片机通过控制寄存器和定时器,可以产生一定频率和占空比的PWM信号。
具体实现PWM输出的方式根据不同的单片机型号和架构会有所差异。
一般来说,通过设置定时器的初值和重载值,以及改变比较器的阈值,单片机可以按需生成PWM波形。
PWM信号的频率决定了输出信号的周期,而占空比则决定了高电平信号的持续时间比例。
通常,高电平持续时间比例越大,输出信号的平均功率越高。
二、单片机中PWM输出的应用1. 电机控制:PWM可用于控制电机的转速和方向。
通过改变PWM信号的占空比,可以调整电机的运行速度。
同时,通过反馈回路,可以实现闭环控制,使电机保持稳定的转速。
2. LED亮度调节:基于人眼暂时视觉暂留效应,通过快速切换LED 的亮灭状态,可以在人眼的感知上产生不同亮度的效果。
通过改变PWM信号的占空比,可以实现对LED的亮度进行调节。
3. 数字信号转模拟信号:通过PWM技术,单片机可以将数字信号转换为模拟信号。
在数字信号中,通过改变PWM信号的频率和占空比,可以模拟出各种不同的模拟信号形态,如正弦波、方波等。
三、使用单片机指令生成PWM输出与模拟信号在使用单片机进行PWM输出和模拟信号生成时,需要根据具体的单片机型号和开发环境来进行相应的编程。
51单片机——增强型PWM,使用自带PWM发生器
51单片机——增强型PWM,使用自带PWM发生器0. 序之前用定时器做了模拟PWM输出,得到的1k左右波形还行,到10k往上波形就特别难看,又是跳变又是长短不一。
后来在参考手册上面看到stc15w4k系列自带pwm波形发生器,于是整了好久写出来了。
今天因为业务需求要改代码,回头一看,好家伙,都不知道自己写的啥了。
看了一会儿想起来,于是有了此文。
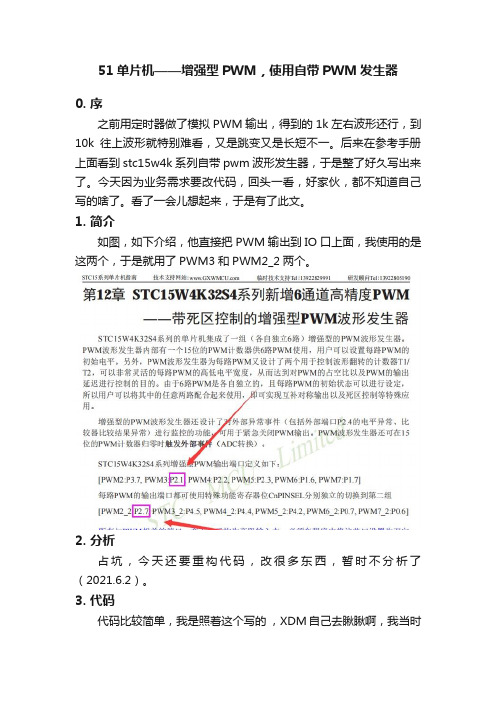
1. 简介如图,如下介绍,他直接把PWM输出到IO口上面,我使用的是这两个,于是就用了PWM3和PWM2_2两个。
2. 分析占坑,今天还要重构代码,改很多东西,暂时不分析了(2021.6.2)。
3. 代码代码比较简单,我是照着这个写的,XDM自己去瞅瞅啊,我当时看了一早上才看明白。
1.#include <STC15.H> //52头文件2.#include <PWM.H>3.4.u8 Tcount=0; //一个PWM周期内的:周期计数,占空比,方向5.sbit PWM = P2^1;//PWM4口6.sbit PWM2 = P2^7; //PWM2口7.sbit NPWM1 =P5^4; //关闭PWM异常口8.sbit NPWM2 =P5^4; //关闭PWM异常口9.void setPWMWide(u8 Wide); //设置脉宽10.11.#define CYCLE 0x800L//5khz //定义PWM周期(最大值为32767)12.#define DUTY1 20 //定义占空比为20%13.#define DUTY2 30 //定义占空比为30%14.#define DUTY3 50 //定义占空比为50%15.16.//主函数17.void InitPWM()18.{19.InterruptInit();//初始化中断配置20.}21.22.void setPWMWide(u8 Wide)23.{24.P_SW2 |= 0x80; //使能访问XSFR25.PWMIF=0x00;26.PWMFDCR = 0x00; //关闭PWM异常检测,P5.4和P5.5在IIC中使用,如果不关闭会一直进入异常导致无法设置PWM占空比27.PWMCFG = 0x00; //配置PWM的输出初始电平为低电平28.PWMCKS = 0x00; //选择PWM的时钟为Fosc/(0+1)29.PWMC = CYCLE; //设置PWM周期30.31.//板子PWM4 芯片PWM2_2 P2.732.// PWM2T1 = 0x0000; //设置PWM2第1次反转的PWM计数33.// PWM2T2 = CYCLE * DUTY / 100; //设置PWM2第2次反转的PWM计数34.PWM2T1 = 0x0000; //设置PWM2第1次反转的PWM计数35.PWM2T2 = CYCLE * (Wide) / 100; //设置PWM2第2次反转的PWM计数36.PWM2CR |= 0x08; //选择PWM2输出到P2.7,不使能PWM2中断37.38.PWM3T1 = 0x0000; //设置PWM2第1次反转的PWM计数39.PWM3T2 = CYCLE * (Wide) / 100; //设置PWM2第2次反转的PWM计数40.//占空比为(PWM2T2-PWM2T1)/PWMC41.PWM3CR = 0; //选择PWM2输出到P2.142.43.//使能44.PWMCR = 0x03; //使能PWM信号输出45.PWMCR |= 0x80; //使能PWM模块46.P_SW2 &= ~0x80;47.48.}49.50.void SetPWM(u8 level) //设置风扇等级 1 2 3 4是自动不用管风速51.{52.// PutChar(speedFlag);53.if(level==1) //1是9.8k54.{55.setPWMWide(DUTY1);56.}57.else if(level==2)58.{59.setPWMWide(DUTY2);60.}61.else if(level==3)62.{63.setPWMWide(DUTY3);64.}65.66.}67.68.69.//中断初始化配置70.void InterruptInit()71.{72.73.P2M1 &= 0<<1; //PWM4 P2.1 设置推挽74.P2M0 |= 1<<1;75.P2M1 &= 0<<7; //PWM4 P2.7 设置推挽76.P2M0 |= 1<<7;77.78.PWM=0;79.PWM2=0;80.81.P_SW2 |= 0x80; //使能访问XSFR82.PWMIF=0x00;83.PWMFDCR = 0x00; //关闭PWM异常检测,P5.4和P5.5在IIC中使用,如果不关闭会一直进入异常导致无法设置PWM占空比84.PWMCFG = 0x00; //配置PWM的输出初始电平为低电平85.PWMCKS = 0x00; //选择PWM的时钟为Fosc/(0+1)86.PWMC = CYCLE; //设置PWM周期87.88.//板子PWM4 芯片PWM2_2 P2.789.PWM2T1 = 0x0000; //设置PWM2第1次反转的PWM计数90.PWM2T2 = CYCLE * DUTY1 / 100; //设置PWM2第2次反转的PWM计数91.//占空比为(PWM2T2-PWM2T1)/PWMC92.PWM2CR |= 0x08; //选择PWM2输出到P2.7,不使能PWM2中断93.94.//板子PWM2 芯片PWM3 P2.195.PWM3T1 = 0x0000; //设置PWM2第1次反转的PWM计数96.PWM3T2 = CYCLE * DUTY1 / 100; //设置PWM2第2次反转的PWM计数97.//占空比为(PWM2T2-PWM2T1)/PWMC98.PWM3CR = 0; //选择PWM2输出到P2.199.100.//使能101.PWMCR = 0x03; //使能PWM信号输出102.PWMCR |= 0x80; //使能PWM模块103.P_SW2 &= ~0x80;104.105.}。
pwm波形的生成方法

pwm波形的生成方法
PWM波形的生成方法主要有以下几种:
1. 波形发生器产生PWM:最简单的方式是使用波形发生器,只需要在发生器上设置一下,就能轻易获取想要的PWM。
2. 单片机产生PWM:现在很多单片机都配置了能产生PWM的端口,或者通过单片机的端口进行模拟产生PWM,只需要通过编写一些程序,就能产生出想要的PWM。
3. 可编程逻辑器件产生PWM:以可编程的逻辑器件,如CPLD或FPGA为硬件基础,编写专用程序来产生PWM,这种方式产生的PWM频率、占空比比较准确。
4. 专用PWM芯片产生PWM信号:很多厂家都设计、生产了一些能产生PWM的芯片,使用这些芯片就能很方便产生PWM,也方便应用到产品设计中。
5. 比较式PWM:比较式PWM是最常见的PWM产生方法,它通过比较一个变量信号与一个固定的参考电平来生成PWM信号。
主要包括两个阶段:比较器输出与集成器输出。
比较器是比较式PWM的核心组成部分,由比较器和参考电压组成。
可以将模拟控制信号与一个固定的电压(参考电压)进行比较,从而生成PWM信号。
集成器是比较式PWM的后级,它将比较器输出的脉冲信号进行整形,生成PWM波形。
如果将比较式PWM与单片机
相结合,可以使用定时器/计数器来生成PWM波形。
通过定时器/计数器的控制,可以改变PWM的频率和占空比。
以上内容仅供参考,如需更多信息,建议查阅相关文献或咨询专业人士。
单片机课程设计PWM直流电动机调速控制系统方案
单片机原理及应用—— P W M直流电机调速控制系统概括直流电动机具有良好的启动性能和调速特性。
具有起动转矩大、调速平稳、经济大范围、调速容易、调速后效率高等特点。
本文设计的直流电机调速系统主要由51单片机、电源、H桥驱动电路、LED 液晶显示器、霍尔测速电路和独立按键组成的电子产品组成。
电源采用78系列芯片,采用PWM波方式实现电机+5V、+15V调速,PWM为脉宽调制,通过51单片机改变占空比实现。
通过独立的按键实现电机的启停、调速和转向的手动控制,LED实现测量数据(速度)的显示。
电机转速采用霍尔传感器检测输出方波,通过51单片机统计1秒内方波脉冲个数,计算电机转速,实现直流电机的反馈控制。
关键词:直流电机调速; H桥驱动电路; LED显示屏; 51单片机目录摘要2摘要错误!未定义书签。
目录3第 1 章引言41.1 概述41.2 国外发展现状41.3 要求51.4 设计目的及6第 2 章项目论证与选择72.1 电机调速模块72.2 PWM调速工作模式72.3 PWM脉宽调制方式错误!未定义书签。
2.4 PWM 软件实现错误!未定义书签。
第三章系统硬件电路设计83.1 信号输入电路83.2 电机PWM驱动模块电路9第 4 章系统的软件设计104.1 单片机选型104.2 系统软件设计分析10第 5 章 MCU 系统集成调试135.1 PROTEUS 设计与仿真平台错误!未定义书签。
18传统开发流程对比错误!未定义书签。
第一章简介1.1 概述现代工业的电驱动一般要求部分或全部自动化,因此必须与各种控制元件组成的自动控制系统相联动,而电驱动可视为自动电驱动系统的简称。
在这个系统中,生产机械可以自动控制。
随着现代电力电子技术和计算机技术的发展以及现代控制理论的应用,自动电驱动正朝着计算机控制的生产过程自动化方向发展。
以实现高速、高质量、高效率的生产。
在大多数集成自动化系统中,自动化电力牵引系统仍然是不可或缺的组成部分。
单片机PWM调光原理与实现方法
单片机PWM调光原理与实现方法近年来,随着LED灯具的广泛应用,调光技术也变得越来越重要。
单片机作为调光控制的核心部件之一,使用PWM(脉宽调制)技术可以实现灯光的亮度调节。
本文将介绍单片机PWM调光原理及实现方法。
一、PWM调光原理PWM是一种基于时间的调光方法,通过改变信号的高低电平持续时间的比例来调节灯光的亮度。
该方法适用于LED等光源,因为LED的发光亮度与通电时间成正比。
PWM调光原理如下:1. 设定周期:在PWM调光中,首先需要设定一个时间的基本周期。
周期越大,灯光的亮度变化也就越平滑。
典型的PWM周期一般为几十微秒。
2. 设定占空比:占空比是表示高电平时间占总周期时间的比例,通常以百分比表示。
占空比越高,灯光亮度越大;占空比越低,灯光亮度越小。
3. 生成PWM信号:根据设定的周期和占空比,单片机通过不断计数生成PWM信号。
当计数值小于占空比时,输出高电平;当计数值大于占空比时,输出低电平。
通过改变计数阈值,可以实现不同占空比的PWM信号。
4. 连接LED灯:通过PWM输出口将生成的PWM信号连接到LED灯。
当PWM信号为高电平时,LED点亮;为低电平时,LED熄灭。
通过不断重复生成PWM信号,可实现灯光的调光效果。
二、实现方法在单片机上实现PWM调光功能有多种方法,下面将介绍两种常见的实现方法。
1. 软件实现PWM调光软件实现PWM调光是通过单片机的定时器和计数器来实现的。
具体步骤如下:1) 设置定时器:选择适合的定时器工作模式,并设置定时周期。
定时周期即为PWM的周期。
2) 设置计数器:设置计数器的初值。
3) 发出PWM信号:当计数器值小于占空比时,输出高电平;否则输出低电平。
4) 重复步骤3,不断更新计数器的值,从而生成PWM信号。
2. 硬件实现PWM调光硬件实现PWM调光是通过使用专用的PWM模块和电路来实现的。
具体步骤如下:1) 配置PWM模块:根据单片机的特点,选择适合的PWM模块,并进行配置。
PWM实现方式
PWM实现方式:调脉宽的方式有三种:定频调宽、定宽调频和调宽调频。
我们采用了定频调宽方式,因为采用这种方式,电动机在运转时比较稳定;并且在产生PWM脉冲的实现上比较方便。
1、定时/计数器由于PWM信号软件实现的核心是单片机内部的定时器,而不同单片机的定时器具有不同的特点,即使是同一台单片机由于选用的晶振不同,选择的定时器工作方式不同,其定时器的定时初值与定时时间的关系也不同。
因此,首先必须明确定时器的定时初值与定时时间的关系。
如果单片机的时钟频率为f,定时器/计数器为N位,则定时器初值与定时时间的关系为:(1-1)式中,T W—定时器定时初值;N—一个机器周期的时钟数。
N随着机型的不同而不同。
在应用中,应根据具体的机型给出相应的值。
本设计中单片机采用11.0592MZ的晶体振荡器,故N为12。
这样,我们可以通过设定不同的定时初值T W,从而改变占空比,进而达到控制电机转速的目的。
2、PWM产生程序#include<reg52.h>#define uchar unsigned charuchar num;sbit PWM=P1^0;void init(){TMOD=0x01;TH0=(65536-500)/256;TL0=(65536-500)%256;EA=1;ET0=1;TR0=1;}void T0_timer() interrupt 1{TH0=(65536-500)/256; TL0=(65536-500)%256; num++;}void main(){init();while(1){if(num==4){PWM=~PWM;num=0;}}}。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
unsigned int a, b;
//
void main()
{
TMOD=0x01; //T0定时方式1
TH0= (65536-50000) / 256;//50ms@12MHz
if(num== 1)//设定占空比80%
{
led= 1;
}
else if(num== 5)
{
num= 0;
led= 0;
}
此方法稳定性也不是很高有大概10%的占空比波动,当然也可
以按位取反,不过占空比就只个T0控制频率 两个外部中断INT0 INT1分别控制pwm的加减 并且用数码管输出占空比的级数 ,程序摘录如下,调节占空比的部分比较出 彩
TL0= (65536-50000) % 256;
EA= 1;//开总中断
ET0= 1;//开定时器T0
TR0= 1;
TH1= (65536-5000) / 256;//25ms@12MHz
TL1= (65536-5000) % 256;
while(1);
}
//
void t0() interrupt1
TH0 = (65536-50000)/256;〃50ms@12MHz
a++;
if(a == 20) a = 0; //在这里调整周期.
if(a < b) P2 = 0xff; //在这里调整占空比.
else P2 = 0x00;
P0 = ((b/10) << 4)+b%10; //显示占空比等级
}
//
void X0_INT() in terrupt 0
{
b++;
if(b > 19) b = 19; //占空比等级最大为19
}
//
void X1_INT() in terrupt 2
{
b--;
if(b < 1) b = 1; //占空比等级最小为1.
}
//==========================================
原文链接关于MCS-5要两个定时器,第一个控制频率,第二个控 制占空比 稳定性非常高。
#include<reg52.h>
//
void main()
{
TMOD=0x11;//定时器工作模式
TH0= (65536-50000) / 256;//50ms@12MHz
第一次学单片机,学到PWM的时候刚好有很多事,就学的很是纠结。今晚不对是今 晨,大概三点半有了一点思路,写下来,以飨初学者。
设计思路:
A.单纯的通过延时程序,让单片机在某段时间内输出高电平,另一段时间内输出 低电平。思路很简单,但是稳定性有待商榷,频率不可调。
B.利用一个定时器,提高计时精度,if语句
{
TR1= பைடு நூலகம்;
P2=0XFF;
TLO = (65536-50000)%256;
TRO = 1;
ET0 = 1;
EX0 = 1; EX1 = 1;
IT0 = 1; IT1 = 1;
EA = 1;
a = 0;
b = 10;
while(1);
}
//
void time0() in terrupt 1
{
TL0 = (65536-50000)%256;
TL0= (65536-50000) % 256;
TH0= (65536-50000) / 256;//50ms@12MHz
P2= 0;
TL1= (65536-5000) % 256;
TH1= (65536-5000) / 256;
ET1= 1; //开定时器T1
TR1= 1;
}
void t1() interrupt3