pmac自定义串口实验
实验2(串行端口程序设计实验)
实验2:串行端口程序设计一、实验目的了解在linux环境下串行程序设计的基本方法。
掌握终端的主要属性及设置方法,熟悉终端I /O函数的使用。
学习使用多线程来完成串口的收发处理。
二、实验内容读懂程序源代码,学习终端I /O函数的使用方法,学习将多线程编程应用到串口的接收和发送程序设计中。
三、预备知识有C语言基础。
掌握在Linux下常用编辑器的使用。
掌握Makefile 的编写和使用。
掌握Linux下的程序编译与交叉编译过程四、实验设备及工具硬件:UP-NETARM2410-S嵌入式实验平台、PC机Pentium 500以上, 硬盘10G以上。
软件:PC机操作系统REDHAT LINUX 9.0+MINICOM+ARM-LINUX开发环境五、实验原理异步串行I /O方式是将传输数据的每个字符一位接一位(例如先低位、后高位)地传送。
数据的各不同位可以分时使用同一传输通道,因此串行I/O可以减少信号连线,最少用一对线即可进行。
接收方对于同一根线上一连串的数字信号,首先要分割成位,再按位组成字符。
为了恢复发送的信息,双方必须协调工作。
在微型计算机中大量使用异步串行I/O方式,双方使用各自的时钟信号,而且允许时钟频率有一定误差,因此实现较容易。
但是由于每个字符都要独立确定起始和结束(即每个字符都要重新同步),字符和字符间还可能有长度不定的空闲时间,因此效率较低。
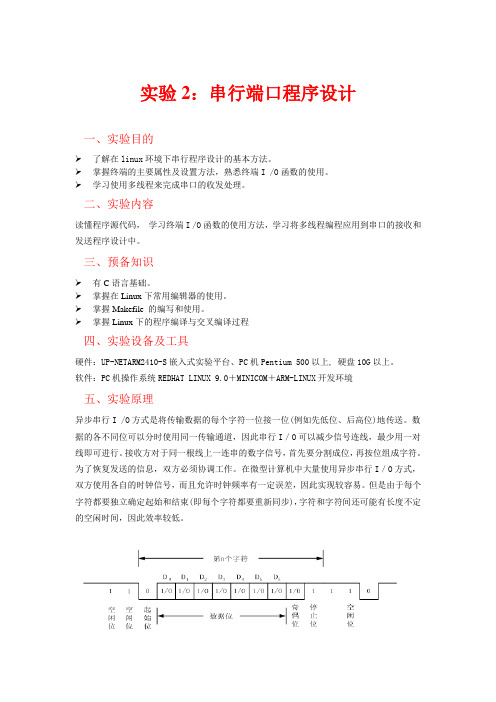
图2.3.1串行通信字符格式图2.3.1给出异步串行通信中一个字符的传送格式。
开始前,线路处于空闲状态,送出连续“1”。
传送开始时首先发一个“0”作为起始位,然后出现在通信线上的是字符的二进制编码数据。
每个字符的数据位长可以约定为5位、6位、7位或8位,一般采用ASCII编码。
后面是奇偶校验位,根据约定,用奇偶校验位将所传字符中为“1”的位数凑成奇数个或偶数个。
也可以约定不要奇偶校验,这样就取消奇偶校验位。
最后是表示停止位的“1”信号,这个停止位可以约定持续1位、1.5位或2位的时间宽度。
串口自定义通信协议程序
串口自定义通信协议程序【原创实用版】目录一、串口通信协议的基础知识二、自定义串口通信协议的实现方法三、温度采集器与上位机串口通信协议的设计实例四、自定义串口通信协议的应用优势与局限性正文一、串口通信协议的基础知识串口通信协议是一种基于串行通信的数据传输方式。
与并行通信相比,串口通信协议具有线路简单、成本低的优点。
在电子设备之间进行数据传输时,常常使用串口通信协议。
在串口通信中,数据是逐个比特按顺序进行传输的。
发送方将数据字符从并行转换为串行,按位发送给接收方。
接收方收到串行数据后,再将其转换为并行数据。
这种通信方式在仅使用一根信号线的情况下完成数据传输,具有线路简单、成本低的优点。
但是,由于串口通信是按位进行的,因此传输速度较慢,且容易受到噪声干扰。
二、自定义串口通信协议的实现方法自定义串口通信协议的实现方法主要包括以下几个步骤:1.选择合适的硬件层通信协议。
常见的硬件层通信协议有 RS-232、RS-485 等。
选择合适的通信协议需要考虑通信距离、通信速率、抗干扰能力等因素。
2.设计数据帧格式。
数据帧格式包括起始符、地址符、数据长度、数据内容、校验和、结束符等。
起始符用于指示数据帧的开始,地址符用于指示数据帧的地址,数据长度用于指示数据帧的数据内容长度,数据内容用于存储实际的数据信息,校验和用于检验数据传输的正确性,结束符用于指示数据帧的结束。
3.编写下位机程序。
下位机程序主要负责发送和接收数据,实现硬件层通信协议。
在编写下位机程序时,需要考虑数据帧的组装、发送、接收、解析等方面。
4.编写上位机程序。
上位机程序主要负责与下位机进行通信,实现数据采集、控制等功能。
在编写上位机程序时,需要考虑数据帧的解析、数据处理、控制指令的发送等方面。
三、温度采集器与上位机串口通信协议的设计实例假设我们需要设计一个温度采集器与上位机之间的串口通信协议,用于实现温度采集数据上传和上位机控制每路温度测量通道的开启功能。
PMAC培训

PMAC应用培训计划第一天 上午9:30 -10:00 交流培训需求 10:00 -11:40 Pmac卡概述及clipper硬件介绍(含Pmac-pc104) 11:50 -12:50 吃午饭 下午1:00 -2:00 Pewin32pro及相关软件的使用 2:00 -4:00 分组实际操作练习 第二天 上午9:30 -11:40 在线指令和变量说明及注意事项(含Pmac-pc104) 11:50 -12:50 吃午饭 下午1:00 -2:00 PID调节方法 2:00 -4:00 分组实际操作练习 第三天 上午9:30 -11:40 简单运动的编写和plc程序的编写方法 11:50 -12:50 吃午饭 下午1:00 -2:00 简介上位软件的通讯 2:00 -4:00 答疑及分组实际操作练习PMAC应用培训北京钧义志成科技发展有限公司PMAC多轴运动控制卡• PMAC的含义: • PMAC是program multiple axis controller 可编程的多轴运动控制卡。
• PMAC的特点: • PMAC卡是美国Deltatau公司的产品,是集 运动轴控制,和PLC控制以及数据采集的多 功能的运动控制产品。
PMAC卡1型和2型卡的主要区别• 1型卡 控制信号为模拟量,+-10V • 2型卡 控制信号为数字量,直接输出 PWM脉宽调制信号PMAC卡轴数类型• 2轴卡 PMAC MINI PCI MINI PMAC2 • 4轴卡 PMAC PCI Lite PMAC2 PCI Lite PMAC2A-104 • 8轴卡 PMAC PCI PMAC2 PCI PMAC2A-104+ACC1P • 32轴卡 Turbo PMAC PCI Turbo PMAC2 PCIPMAC新产品Clipper• 4轴 Clipper • 8轴 Clipper + Acc1P • 12轴 Clipper + Acc1P(2块)PMAC通讯方式类型• • • • PCI PC104 总线 USB 通讯 (PMAC2A-104 UMAC) 串口 通讯 RS422 或RS232 网卡通讯 ( PMAC2A-104 Clipper)ClipperTurbo PMAC2-Eth-Lite controllerTurbo PMAC Clipper 简介• Turbo PMAC Clipper是一个基于 TurboPMAC2 CPU功能齐全,结构紧凑, 成本的多轴控制器,标配以太网和RS232 通信接口和内置的I O. Clipper提供完整 TurboPMAC 2处理器,并提供最低配置4轴 伺服或步进控制32个数字I / O点。
PMAC多轴运动控制卡学习(硬件)
目录PMAC控制卡学习(硬件) (2)第一章PMAC简介 (2)1。
1 PMAC的含义和特点 (2)1。
2 PMAC的分类及区别 (2)1.2。
1 PMAC的分类 (2)1.2.2 PMAC 1型卡与2型卡的主要区别 (2)第二章Turbo PMAC Clipper控制器硬件配置 (3)2.1 Turbo PMAC Clipper控制器简介 (3)2.2 Turbo PMAC Clipper硬件配置 (3)2.2。
1 Turbo PMAC Clipper硬件标准配置为: (3)2.2。
2 Turbo PMAC Clipper控制器可选附件 (6)2。
2。
2.1 轴接口板 (6)2.2.2。
2 反馈接口板 (7)2。
2.2.3 数字I/O接口板 (7)第三章Turbo PMAC Clipper设备连接 (7)3.1 板卡安装 (7)3。
2 控制卡供电 (7)3。
2.1 数字电源供电 (7)3。
2.2 DAC(数字/模拟转换)输出电路供电 (8)3。
2.3 标志位供电 (8)3.3 限位及回零开关 (8)3。
3.1 限位类型 (8)3。
3。
2 回零开关 (8)3.4电机信号连接 (9)3.4.1增量式编码器连接 (9)3.4。
2 DAC 输出信号 (9)3.4.3 脉冲&方向(步进)驱动 (10)3。
4.4 放大器使能信号(AENAn/DIRn) (10)3。
4。
5 放大器错误信号(FAULT-) (10)3。
4.6 可选模拟量输入 (11)3.4。
7 位置比较输出 (11)3.4。
8 串行接口(JRS232) (11)3.5 设备连接示例 (12)3.6 接口及指示灯定义 (13)3.7 跳线定义 (15)3。
8 Turbo PMAC Clipper端口布置及控制结构图 (19)附件 (21)1。
接口各针脚定义 (21)2。
电路板尺寸及孔位置 (30)PMAC控制卡学习(硬件)第一章PMAC简介1.1PMAC的含义和特点1.PMAC的含义:PMAC是program multiple axis controller 可编程的多轴运动控制卡。
PMAC2A-PC104通讯及连接

一、和PMAC卡建立通讯步骤1)在计算机系统中安装PEWIN32PRO软件。
2)在计算机系统中添加硬件设备驱动程序。
a)进入控制面板选择“添加硬件”图标b)根据提示进入到“已安装的硬件”列表,选择“添加新的硬件设备”c)选择手动从列表选择硬件d)在常见硬件类型中选择“显示所有设备”e)在厂商栏中选择“Delta Tau Data Systems”;在型号栏中选择“PMAC ISA Motion Controller”(注:如提示缺少文件可在C:\WINDOWS\SYSTEM32\DRIVERS\下找到)。
f)在控制面板中进入“系统”中的“设备管理器”,找到PMAC ISA Motion Contrller 进入其属性界面,点击“资源”页。
取消“使用自动设置”,点击“更改设置”将输入/输出范围值改为0210-021F。
确定。
g)重新启动计算机3)运行PEWIN32PRO软件,选择菜单栏中Setup->General Setup and Options 在对话框中点击“Select”在PMAC Devices 对话框中点击“Insert…”;选择“PMAC ISA0, Port: 0×210,Intr: N/A”点击“OK”键。
返回“PMAC Devices”对话框点击“Test”显示“The PMAC was successfully detected”此时已经和PMAC卡建立通讯。
依次点击“确定”“OK”退至PEWIN32PRO主窗体。
二、接线表1)PMAC2A-PC104 50芯======>50芯接口板50芯侧管脚第1富士伺服26芯模拟量输入29(DAC+)―――――――――――――――2248(GND)―――――――――――――――13第一电机编码器5(A+)―――――――――――――――97(A-)―――――――――――――――109(B+)―――――――――――――――1111(B-)―――――――――――――――1213(C+)―――――――――――――――2315(C-)―――――――――――――――243(GND)―――――――――――――――2650芯侧管脚第2富士伺服26芯模拟量输入30(DAC+)―――――――――――――――2248(GND)―――――――――――――――13第二电机编码器6(A+)―――――――――――――――98(A-)―――――――――――――――1010(B+)―――――――――――――――1112(B-)―――――――――――――――1214(C+)―――――――――――――――2316(C-)―――――――――――――――243(GND)―――――――――――――――2650芯侧管脚第3富士伺服26芯模拟量输入37(DAC+)―――――――――――――――2248(GND)―――――――――――――――13第3电机编码器17(A+)―――――――――――――――919(A-)―――――――――――――――1021(B+)―――――――――――――――1123(B-)―――――――――――――――1225(C+)―――――――――――――――2327(C-)―――――――――――――――243(GND)―――――――――――――――262)限位信号、回零信号PMAC2A-PC104 34芯======>34芯接口板34芯接口板管脚1 ―――――――――――――――+5~24V电源+V(1、2电机)3 ―――――――――――――――电源0V回零1 5 ――――――常开―――――――电源0V正限位1 7 ――――――常闭―――――――电源0V负限位1 9 ――――――常闭―――――――电源0V回零2 6 ――――――常开―――――――电源0V正限位2 8 ――――――常闭―――――――电源0V负限位2 10 ――――――常闭―――――――电源0V2 ―――――――――――――――+5~24V电源+V(3、4电机)4 ―――――――――――――――电源0V回零3 19 ――――――常开―――――――电源0V正限位3 21 ――――――常闭―――――――电源0V负限位3 23 ――――――常闭―――――――电源0V回零4 20 ――――――常开―――――――电源0V正限位4 22 ――――――常闭―――――――电源0V负限位4 24 ――――――常闭―――――――电源0V三参数设定模拟量方式:I100=1 I200=1 I300=1 I400=1I125=$52C000I225=$52C008I325=$52C010I425=$52C018I900=1001I901=2I902=3I10=1710933I169=1024 I269=1024 I369=1024 I469=1024I130~I135 PID参数I910 、I920、I930、I940 缺省设为7 如果反馈反了请改为3 四供电电源总线方式通讯,不需要接电源。
串口自定义通信协议程序
串口自定义通信协议程序摘要:一、什么是自定义串口通信协议二、自定义串口通信协议的应用实例三、如何实现自定义串口通信协议四、自定义串口通信协议的优缺点五、总结正文:一、什么是自定义串口通信协议自定义串口通信协议是指在串口通信过程中,通过约定好的规则和格式来进行数据传输的一套通信规则。
这套规则通常包括数据格式、传输速率、校验方式等,以便保证数据在传输过程中的准确性和完整性。
在电子设备、计算机外设、通信设备等领域都有广泛的应用。
二、自定义串口通信协议的应用实例以温度采集器与上位机的串行通信协议为例,可以实现温度采集数据上传和上位机控制每路温度测量通的开启功能。
具体的通信协议可以参考如下步骤来实现:首先选择层通信协议设计相应的通信协议,然后编写相关的下位机程序和上位机程序,最后实现通信协议的收发机制。
三、如何实现自定义串口通信协议实现自定义串口通信协议需要以下几个步骤:1.选择合适的硬件层通信协议。
常见的硬件层通信协议有RS-232、RS-485 等。
2.设计数据格式和传输速率。
根据实际需求,确定数据格式(如字节、字符等)和传输速率。
3.实现校验和错误检测。
为了保证数据传输的准确性,需要实现校验和错误检测机制,如奇偶校验、CRC 校验等。
4.编写上下位机程序。
根据通信协议的规则,编写下位机程序(如温度采集器)和上位机程序(如上位计算机)。
5.实现通信协议的收发机制。
通过硬件设备(如串口模块)或软件(如串口通信库)实现通信协议的收发机制。
四、自定义串口通信协议的优缺点优点:1.灵活性高:自定义串口通信协议可以根据实际需求进行设计,具有较高的灵活性。
2.适用范围广:串口通信协议可以应用于各种电子设备、计算机外设、通信设备等领域。
3.实现简单:相对于其他通信协议(如TCPIP),串口通信协议实现较为简单,成本较低。
缺点:1.传输速率有限:串口通信协议的传输速率有限,不适合高速数据传输。
2.抗干扰能力较弱:串口通信协议的抗干扰能力较弱,容易受到环境干扰。
PMAC技术培训初级

E-MOTION PMAC多轴运动控制卡
Machine I/O
A B C
Amplifier
A BC
interface
PMAC
Motor
Enc. Halls
Soft轴运动控制卡
指令8轴同时运动 使用功能强大的数字信号处理芯片 (DSP) PMAC的 CPU 使用 Motorola DSP56001 或 DSP56002
常用接线板
ACC8P ACC8D
32IN/OUT +8IN 8 OUT
ACC8F ACC8S ACC8E
32IN/OUT 8IN+8OUT
ACC-1 ACC-2
E-MOTION PMAC2 相对 PMAC(1)
直接 PWM 输出 在板 MACRO 接口 更完善的正弦波信号输出控制 更完善的模拟量编码器信号分频能力 更强大的脉冲加方向信号输出控制 更出众的 磁致伸缩 MLDT 接口 增强的位置比较输出功能 更高的 DAC 信号输出分辨率(18-bit vs. 16-bit) 更多的在板功能选项:
JDISP ACC12 402 LCD Display
3
E-MOTION PMAC多轴运动控制卡
PMAC 关于特定的应用,可如下配置: 编写运动程序和PLC程序 选择硬件设定 (通过选项和附件)
每个PMAC固件有8轴的能力. 这8轴可以: 完全联动于一个坐标系下 可以独立的运行于各自的坐标系下 可以几个组合,实现某个功能 可以与其他的 15块PMAC级联,实现128轴的 完全同步运动
BUFFERS
E-MOTION
PMAC多轴运动控制卡
PMAC 1型卡与2型卡的主要区别:
PMAC 1
PMAC2
串口实验实验报告

串口实验实验报告串口实验报告【引言】串口通信是一种常见的数据传输方式,它通过串行传输比特流来实现设备之间的通信。
在本次实验中,我们将通过串口实验来了解串口通信的原理和应用。
【实验目的】本次实验的目的是掌握串口通信的基本原理和使用方法,了解串口通信在实际应用中的作用。
【实验器材】1. 串口模块2. 电脑3. 串口线4. 软件调试工具【实验步骤】1. 连接串口模块和电脑:将串口模块与电脑通过串口线相连。
2. 打开串口调试工具:在电脑上打开串口调试工具,并选择正确的串口号和波特率。
3. 配置串口参数:根据实际需求,设置串口的数据位、校验位、停止位等参数。
4. 发送数据:通过串口调试工具发送数据,观察数据是否成功发送。
5. 接收数据:通过串口调试工具接收数据,确认数据是否成功接收。
6. 分析结果:根据实际情况,分析串口通信的数据传输情况,并记录实验结果。
【实验结果】经过实验,我们成功地使用串口模块进行了数据的发送和接收。
通过串口调试工具,我们可以清晰地观察到数据的传输过程,并确认数据的准确性。
【实验总结】通过本次实验,我们深入了解了串口通信的原理和应用。
串口通信在各个领域都有广泛的应用,例如工业自动化、电子设备控制等。
掌握串口通信的基本原理和使用方法对我们的学习和工作具有重要意义。
【实验感想】本次实验让我更加深入地理解了串口通信的工作原理和使用方式。
通过实际操作,我对串口通信有了更清晰的认识,并对其在实际应用中的作用有了更深刻的理解。
通过这次实验,我也更加意识到了实验的重要性和学习的必要性。
【参考文献】1. 《串口通信原理及应用》2. 《串口通信技术与应用》3. 《串口通信实验教程》【致谢】感谢实验指导老师对本次实验的悉心指导,也感谢实验室的同学们在实验过程中给予我的帮助和支持。
他们的支持和鼓励是我完成本次实验的动力来源。
【附录】实验中使用的串口调试工具下载链接:[下载链接](请自行搜索并下载合适的串口调试工具)以上为本次串口实验的实验报告,通过这次实验,我们对串口通信有了更清晰的认识,并掌握了串口通信的基本原理和使用方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自定义串口学习笔记
设置变量I1=1,通讯不需要握手
设置变量I43=3使能自定义串口
自定义串口接收操作
当收到第一字节数据时PMAC把该数放在地址为X:$3600处,第二字节的数放在地址为X:$3601处,依次循环下去。
可以存放256个字节的数据。
从地址X:$3600处到地址为X:$36FF处循环存放收到的数据。
地址X:$FFFFE6处存放的是每次收到的字节数,
如:
自定义在串口复位后收到AA BB俩个字节的数据。
AA放在地址为X:$3600处,BB放在地址为X:$3601处。
地址X:$FFFFE6处存的数是2,代表收到俩个字节数据。
自定义串口发送操作
把待发送的数据依次存放在地址为Y:$3600--------Y:$36FF处,最多一次发送256个字节数据,把待发送字节的长度放在地址为X:$FFFFE1处,发送的起始地址放在地址为X:$FFFFE3处。
使能发送使能位X:$FFFFE0的第23位。
如:自定义串口要发送AA BB俩个字节的数据。
首先把AA放在地址为Y:$3600处,BB放在地址为Y:$3601处.,把字节长度2放在地址为X:$FFFFE1处,要从放AA地址处起始发送,需要把$3600这个数放在地址为X:$FFFFE3处,使能发送使能位X:$FFFFE0的第23位。
数据就可以把地址Y:$3600 和Y:$3601中的数据发出。
附件1 自定义串口发送程序
附件2 自定义串口接收程序
附件3 变量I43数据手册
附件4 串口调试软件
2013年11月4日。