模糊自适应整定PID控制仿真实验
模糊自整定PID控制器设计与仿真

糊 PD控制器 , I 结构图如 图 1 所示 :
收稿 日期 :O 8 1 8 z O 一O —1 作者简介 : 林国汉( 9 3 , , 1 7 一)男 硕士 , 讲师 , 研究方 向: 计算机控制
第3 期
林国汉等 : 模糊 自整定 PD控制器设计与仿真 I
13 4 建 立模糊 控 制规则 表 . ..
关键 词 :P D控制 ; I 模糊 控制 ; 自整 定 ; 真 仿 中图分 类号 :T 2 3 文献标 识码 :A P7 文章 编号 :1 7 — 1 9 2 0 ) 3 0 1 - 0 6 1 1 X( 0 8 0 - 0 6 3
P D控 制具有 结构 简单 、 定性 能好 、 靠性 高 I 稳 可 等 优点 , 尤其 适用 于可 建 立 精 确数 学 模 型 的确 定 性 控 制 系统. 是在实 际 的应用 中 , 多数工 业过 程都 但 大
在实 际应用 中 , 一般 是 以误 差 e 误 差 的变 化 和
率 d / te) 为控制器 的输 入 , 以满 足不 同时 刻 ed (c作 可 的e e 和 c对 PD参数 自整定 的要 求. 用 模糊 控 制 I 利 规则在 线对 PD参 数进 行 修 改 , 构 成 了 自适 应 模 I 便
1 7
1 3 2 模糊 控 制器 的结构 ..
单 变 量 二 维 模 糊 控 制 器 的两 个 输 人 语 言 变 量 ( 偏差 e和偏差 变化 ) 以及 3个 输 出语 言变 量 ( KP、 Kl KD的 修 正 值 A 和 KP、 AKl AKD) 和 的模 糊 集 及其论 域定 义如 下 : 误差 e 误差 的变化 率 e 及 c的 模 糊 子 集 均 为 : { B, , , O, S P , B )子 集 中各 个 元 素 N NM NS Z P , M P , 分别 代表 负大 , 中 , 小 , , 小 , 中 , 大. 负 负 零 正 正 正 将 误差 e 误 差 的 变化 率 e 及 c的 变化 范 围定 义 为 模 糊 集上 的论 域l : 3 ]
智能控制作业_模糊自适应PID控制
模糊自适应PID 控制的Matlab 仿真设计研究姓名:陈明学号:201208070103班级:智能1201一、 模糊控制思想、PID 控制理论简介:在工业生产过程中,许多被控对象受负荷变化或干扰因素很多基于模糊自适应控制理论, 设计了一种模糊自适应PID 控制器, 具体介绍了这种PID 控制器的控制特点及参数设计规则, 实现PID 控制器的在线自整定和自调整。
通过matlab 软件进行实例,仿真表明, , 提高控制系统实时性和抗干扰能力,易于实现.便于工程应用。
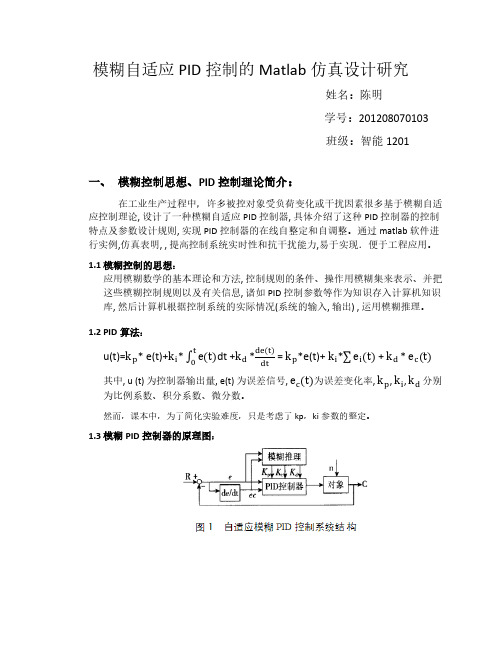
1.1 模糊控制的思想:应用模糊数学的基本理论和方法, 控制规则的条件、操作用模糊集来表示、并把这些模糊控制规则以及有关信息, 诸如PID 控制参数等作为知识存入计算机知识库, 然后计算机根据控制系统的实际情况(系统的输入, 输出) , 运用模糊推理。
1.2 PID 算法:u(t)=k p * e(t)+k i * ∫e(t)t 0dt +k d *de(t)dt= k p *e(t)+ k i *∑e i (t) + k d * e c (t)其中, u (t) 为控制器输出量, e(t) 为误差信号, e c (t)为误差变化率, k p , k i , k d 分别为比例系数、积分系数、微分数。
然而,课本中,为了简化实验难度,只是考虑了kp ,ki 参数的整定。
1.3 模糊PID 控制器的原理图:二、基于Matlab的模糊控制逻辑模块的设计关于模糊逻辑的设计,主要有隶属函数的编辑,参数的选型,模糊规则导入,生成三维图等观察。
2.1 模糊函数的编辑器的设定:打开matlab后,在命令窗口输入“fuzzy”,回车即可出现模糊函数编辑器,基本设置等。
基于课本的实验要求,我选的是二输入(e, e c)二输出(k p ,k i)。
需要注意的是,在命名输入输出函数的时候,下标字母需要借助下划线的编辑,即e_c 能够显示为e c。
2.2四个隶属函数的N, Z, P 函数设定:在隶属函数的设定中,N 选用的是基于trimf(三角形隶属函数) , Z是基于zmf(Z型隶属函数),P是基于smf(S型隶属函数)。
模糊自适应PID控制的仿真研究

10 2 ) 0 0 9
A src:h te r f rp ro I e rl Df rnil I )o t l b t t e h oy P o ot n n ga a T o i t i e t ( D c nr e aP o
s s e i nr u e .Th tu t r n r ai a in o D c n r l s y t m s it od c d e s r c u e a d e l t fPI o to l z o er i i l a d t c n r e e t i g o . O s smp e n i s o t oI f c s o d S PI c n r l r i wiel D o t e s ol d y u e n t e n u ti c n r lpr c s .Ho v rt s ii ut f PI s d i h id s r al o to o e s we e . i i df c l or D f c n r l r t auo o to l s o e t ma i al c n io t e r a ame e s t l c y o dt n h i i p r t wh n h r e t e
维普资讯
自适应模糊PID控制器的设计与仿真

自适应模糊PID控制器的设计与仿真自适应模糊PID控制器是一种结合了模糊控制和PID控制的自适应控制器,它能够在系统的不同工况下根据实际需求对PID参数进行自适应调整,从而使得系统具有更好的动态性能和稳定性。
本文将介绍自适应模糊PID控制器的设计思路和仿真过程。
1.设计思路1.1系统建模首先需要对待控制的系统进行建模,得到系统的数学模型。
这可以通过实验数据或者理论分析来完成。
一般情况下,系统的数学模型可以表示为:$G(s)=\frac{Y(s)}{U(s)}=\frac{K}{s(Ts+1)}$其中,K是系统的增益,T是系统的时间常数。
1.2设计模糊控制器接下来需要设计模糊控制器,包括模糊规则、模糊集和模糊运算等。
模糊控制器的输入是系统的误差和误差的变化率,输出是PID参数的调整量。
1.3设计PID控制器在模糊控制器的基础上,设计PID控制器。
PID控制器的输入是模糊控制器的输出,输出是控制信号。
1.4设计自适应机制引入自适应机制,根据系统的性能指标对PID参数进行自适应调整。
一般可以采用Lyapunov函数进行系统性能的分析和优化。
2.仿真过程在仿真中,可以使用常见的控制系统仿真软件,如MATLAB/Simulink 等。
具体的仿真过程如下:2.1设置仿真模型根据系统的数学模型,在仿真软件中设置仿真模型。
包括系统的输入、输出、误差计算、控制信号计算等。
2.2设置模糊控制器根据设计思路中的模糊控制器设计,设置模糊控制器的输入和输出,并设置模糊规则、模糊集和模糊运算等参数。
2.3设置PID控制器在模糊控制器的基础上,设置PID控制器的输入和输出,并设置PID参数的初始值。
2.4设置自适应机制设置自适应机制,根据系统的性能指标进行PID参数的自适应调整。
2.5运行仿真运行仿真,观察系统的响应特性和PID参数的变化情况。
根据仿真结果可以对设计进行调整和优化。
3.结果分析根据仿真结果,可以分析系统的稳定性、动态性能和鲁棒性等指标,并对设计进行调整和改进。
《2024年电液伺服系统模糊PID控制仿真与试验研究》范文

《电液伺服系统模糊PID控制仿真与试验研究》篇一一、引言随着现代工业自动化技术的飞速发展,电液伺服系统作为重要组成部分,在众多领域中发挥着重要作用。
然而,由于电液伺服系统存在非线性、时变性和不确定性等特点,其控制问题一直是研究的热点和难点。
传统的PID控制方法在面对复杂多变的环境时,往往难以达到理想的控制效果。
因此,本文提出了一种基于模糊PID控制的电液伺服系统控制策略,并进行了仿真与试验研究。
二、电液伺服系统概述电液伺服系统主要由液压泵、液压马达、传感器和控制器等部分组成。
它利用电信号驱动液压系统工作,实现对负载的精确控制。
由于其具有高精度、快速响应等特点,在机械制造、航空航天、船舶等领域得到了广泛应用。
然而,由于电液伺服系统的复杂性,其控制问题一直是研究的重点。
三、模糊PID控制策略针对电液伺服系统的特点,本文提出了一种模糊PID控制策略。
该策略结合了传统PID控制和模糊控制的优点,通过引入模糊逻辑对PID参数进行在线调整,以适应系统参数的变化和环境干扰。
模糊PID控制策略能够在保证系统稳定性的同时,提高系统的响应速度和抗干扰能力。
四、仿真研究为了验证模糊PID控制策略的有效性,本文进行了仿真研究。
首先,建立了电液伺服系统的数学模型和仿真模型。
然后,分别采用传统PID控制和模糊PID控制对模型进行仿真实验。
通过对比两种控制策略的响应速度、稳态精度和抗干扰能力等指标,发现模糊PID控制在电液伺服系统中具有更好的性能。
五、试验研究为了进一步验证模糊PID控制策略的实用性,本文进行了试验研究。
在试验过程中,首先搭建了电液伺服系统的试验平台,然后分别采用传统PID控制和模糊PID控制对实际系统进行控制。
通过对比两种控制策略的试验结果,发现模糊PID控制在电液伺服系统中具有更高的稳态精度和更快的响应速度。
此外,在面对环境干扰时,模糊PID控制也表现出更强的抗干扰能力。
六、结论本文通过对电液伺服系统的模糊PID控制进行仿真与试验研究,验证了该策略的有效性。
模糊PID控制器的仿真研究
建 电
脑
21 0 0年第 5期
模糊 PD控 制器 的仿 真研 究 I
董湘君 ,曾 莹 ,陈 文
( 东技 术 师 范 学 院 自动 化 学 院 广 东 广 州 5 0 3 广 16 5)
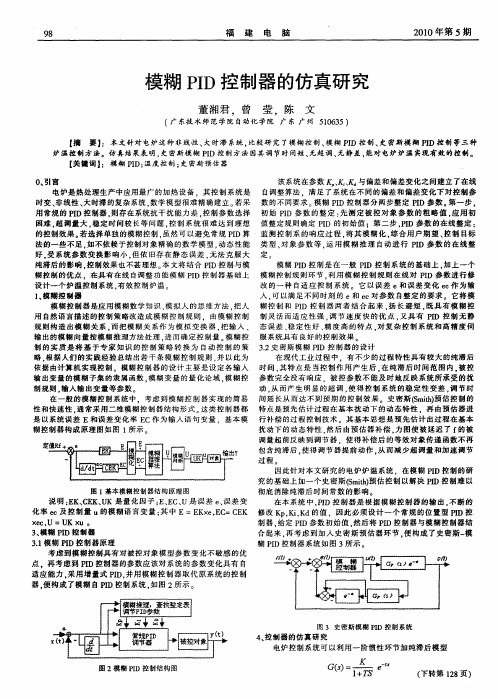
【 摘 要】 :本 文针对 电炉这种非线性、 大时滞系统 , 比较研究 了模糊控制、 糊 PD控 制、 模 I 史密斯模糊 PD控制 等三种 I 炉 温控 制 方法 。仿 真结 果 表 明 , 密 斯模 糊 PD控 制 方 法 因其 调 节 时 间短 、 史 I 无超 调 、 静 差 , 无 能对 电炉 炉 温 实现 有 效 的 控制 。 【 键 词 】 模 糊 PD; 关 : I 温度 控 制 ; 密斯 预估 器 史
初 始 PD 参 数 的 整 定 : 测 定 被 控 对 象 参 数 的粗 略 值 。 用 初 I 先 应 值 整定 规 则 确定 PD 的初 始值 ;第 二 步 ,I 参 数 的 在 线整 定 : I PD 监 测 控 制 系 的 响应 过 程 , 其 模糊 化 , 合 用 户 期 望 、 制 目标 将 综 控 类型、 对象 参 数 等 , 用 模 糊 推 理 自动 进 行 PD 参 数 的 在 线 整 运 I
0 引言 、
该 系统 在参 数 。 、 与 偏差 和 偏 差 变化 之 间 建立 了在 线 、 .
电 炉是 热 处 理 生 产 中应用 最 广 的加 热 设 备 .其 控 制 系 统 是 自词 整 算法 .满 足 了 系 统在 不 同 的偏 差 和 偏差 变 化 下 对 控制 参 时变 、 线 性 、 时滞 的复 杂 系统 , 学 模 型 很难 精 确 建 立 。 采 数 的不 同要 求 。 糊 PD控 制 器分 两 步 整定 PD参 数 。 一 步 。 非 大 数 若 模 I I 第
模糊PID控制仿真与实验研究
r u t. es ls Ke ywo ds:F z D o r l r uz y PI c nto :Si l to mu ai n: Ex e me t pr i n
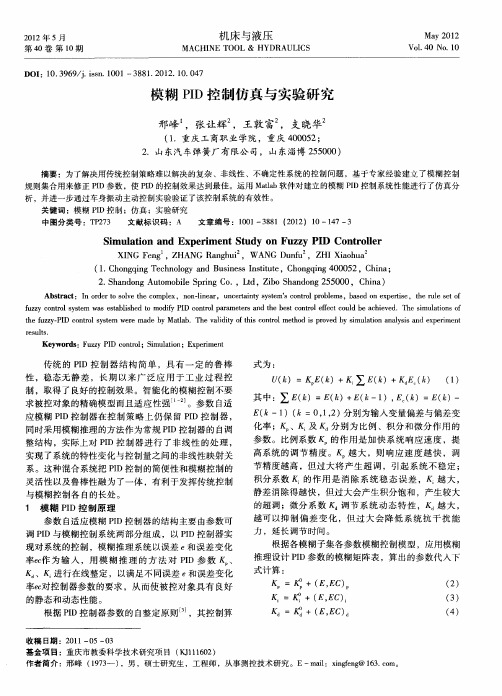
传统 的 PD控 制器 结 构简 单 ,具 有一 定 的鲁 棒 I 性 ,稳态无 静差 ,长期 以来 广 泛应 用 于工 业 过程 控 制 ,取得 了良好 的控制效果 。智能化 的模糊控制不要 求被控对象 的精确模 型而且 适应性强 。参数 自适 应模糊 PD控 制器 在控制 策略上仍 保 留 PD控 制器 , I I
模 糊 PD控 制 仿真 与实 验研 究 I
邢峰 ,张让辉 ,王敦 富 ,支晓华
( .重 庆3 商职 业 学院 ,重庆 4 0 5 ; 1 - 0 0 2
2 .山东汽车弹簧厂有限公 司,山东淄博 250 ) 500
摘要 :为了解 决用传统控制策略难 以解决 的复杂 、非线性 、不确定性 系统 的控 制问题 ,基 于专 家经验建立 了模糊控制 规则集合 用来 修正 PD参数 ,使 PD的控制效果达 到最佳。运用 Ma a I I tb软件对建立 的模糊 PD控制 系统性能进行 了仿真分 l I 析 ,并进 一步通过车身振动主动控制实验验证 了该控制 系统的有效性 。
同时采用模糊 推理 的方法作 为常规 PD控制器 的 自调 I 整结构 ,实 际上对 PD控制 器进行 了非线 性 的处理 , I
温度控制系统模糊自适应PID控制器仿真研究
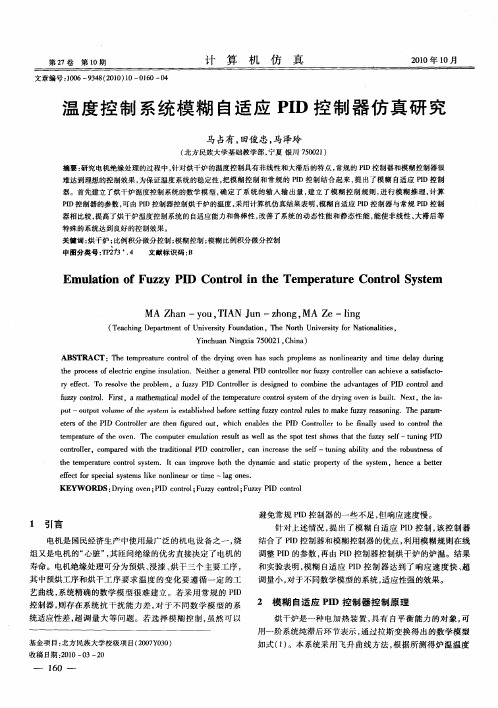
器 。首先建立了烘干炉温度控制系统的数学模 型 , 确定 了系统的输入输 出量 , 建立 了模糊控制 规则 , 进行模糊 推理 , 计算
PD控制器的参数 , I 可由 PD控制器控制烘干炉的温度 , I 采用计算机仿真结果表明, 模糊 自适应 PD控制器 与常规 PD控制 I I
器相 比 , 高了烘干炉温度控制系统 的自适应能力和鲁棒性 , 了系统的动态性能和静态性能 , 较 提 改善 能使非线性 、 大滞后等
ABS RACT:T e tmp e t r o t l ft e d y n v n h ss c r p e sn ni e ry a d t ea u n T h e r au e c n r r i g o e a u h p o lms a o l a t n i d ly d r g oo h n i me i
特殊的系统达到 良好的控制效果。 关键词 : 烘干炉 ; j 比伊 积分微分控制; 模糊控制 ; 模糊 比例积分微分控制
中图 分类 号 :P 7 . T23 4 文 献标 识 码 : B
Em u a i n o l to fFuz y PI Co to n t m p r t e Co t o se z D n r li he Te e a ur n r lSy t m
MA Z a h n—y u, Iቤተ መጻሕፍቲ ባይዱN u o T A J n—z o g MA e—l g hn , Z i n
( e c i e at e t f nvri o n a o , h o h U i ri r a o a t s T ahn D p r n ie t F u d t n T eN r nv syf t n li , g m oU sy i t e t o N i ie Y n h a i x 5 0 1 C ia i u nN n i 7 0 2 , h ) e ga n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验三模糊自适应整定PID控制仿真实验一、实验目的1.通过实验了解数字PID控制的原理2.通过实验实现离散系统的数字 PID 控制仿真3.通过实验了解模糊自适应整定PID控制的原理4.通过实验实现模糊自适应整定PID控制仿真5.通过实验进一步熟悉并掌握Matlab软件的使用方法二、实验内容1.针对给定离散系统的输入信号的位置响应,设计离散PID控制器,编制相应的仿真程序。
2.若采样时间为1ms ,采用模糊PID控制进行阶跃响应,在第300个采样时间时控制器输出加1.0的干扰,编制该模糊自适应整定PID系统的Matlab仿真程序三、实验步骤1.针对给定离散系统的阶跃信号、正弦信号和方波信号的位置响应,设计离散PID控制器,编制相应的仿真程序。
2.确定模糊自整定PID的算法基础3.针对 kp, ki , kd 三个参数分别建立合适的模糊规则表4.画出PID参数的在线自校正工作程序流程图5.编制该模糊自适应整定PID系统的Matlab仿真程序四、实验要求1.设被控对象为:采样时间为1ms,采用Z变换进行离散化,经过Z变换后的离散化对象为:yout(k)=-den(2)yout(k-1)-den(3)yout(k-2)-den(4)yout(k-3)+num(2)u(k-1)+num(3)u(k-2)+num(4)u(k-3)针对离散系统的阶跃信号、正弦信号和方波信号的位置响应,设计离散PID控制器。
其中,S为信号选择变量,S=1时为阶跃跟踪,S=2时为方波跟踪,S=3时为正弦跟踪。
2.采样时间为1ms ,采用模糊PID控制进行阶跃响应,在第300个采样时间时控制器输出加1.0的干扰,编制炉温模糊控制系统的Matlab仿真程序五﹑自适应模糊控制的规则1﹑控制规则:2.模糊控制器设计确定为双输入,三输出结构确定每个变量的论域,其中每个变量都有一个模糊子集来表示。
这个模糊子集中有3个模糊子集,分别是:N ,Z ,P 在编辑界面中,确定好每一个语言变量的范围,以及隶属函数的类型。
如下图所示:输入模糊控制规则:六﹑仿真结果PID 控制器Kp 参数在控制过程中的变化曲线:Ki参数:Kd参数:七﹑实验程序(一)%Fuzzy Tunning PID ControlClear all;Close all;a=newfis('fuzzpid');a=addvar(a,'input','e',[-1 1]);a=addmf(a,'input','1','N','zmf',[-1,-1/3]);a=addmf(a,'input','1','Z','trimf',[-2/3,0,2/3]); a=addmf(a,'input','1','P','smf',[1/3,1]);a=addvar(a,'input','ec',[-1 1]);a=addmf(a,'input','2','N','zmf',[-1,-1/3]);a=addmf(a,'input','2','Z','trimf',[-2/3,0,2/3]); a=addmf(a,'input','2','P','smf',[1/3,1]);a=addvar(a,'output','kp',[-10 10]);a=addmf(a,'input','1','N','zmf',[-10,-3]);a=addmf(a,'input','1','Z','trimf',[-5,0,5]);a=addmf(a,'input','1','P','smf',[3,10]);a=addvar(a,'output','ki',[-3 3]);a=addmf(a,'output','2','N','zmf',[-3,-1]);a=addmf(a,'output','2','Z','trimf',[-2,0,2]);a=addmf(a,'output','2','P','smf',[1,3]);a=addvar(a,'output','kd',[-5 5]);a=addmf(a,'output','3','N','zmf',[-5,-1]);a=addmf(a,'output','3','Z','trimf',[-3,0,3]);a=addmf(a,'output','3','P','smf',[1,5]);Rulelist=[1 1 1 1 1 1 1;1 2 1 2 1 1 1;1 2 2 1 2 1 1;1 3 12 1 1 1;1 323 2 1 1;2 1 1 1 1 1 1;2 23 3 1 1 1;2 1 2 23 1 1;2 3 2 1 3 1 1;2 23 1 2 1 1;3 1 2 1 1 1 1;3 2 3 1 2 1 1;3 1 2 1 2 1 1;3 3 1 2 3 1 1;3 2 3 1 2 1 1];a=addrule(a,rulelist);a=setfis(a,'DefuzzMethod','centroid'); writefis(a,'fuzzy');a=readfis('fuzzpid');figure(1);Plotmf(a,'input',1);figure(2);Plotmf(a,'input',2);figure(3);Plotmf(a,'output',1);figure(4);Plotmf(a,'output',2);figure(5);Plotmf(a,'output',3);figure(6);Plotfis(a);fuzzy fuzzpid;showrule(a);ruleview fuzzpid;(二)%Fuzzy PID ControlClear all;Close all;Warning off;a=readfis('fuzzpid');t=0.001;sys=tf(122,[1,26,0]);dsys=c2d(sys,ts,'z');[num,den]=tfdata(dsys,'v');u-1=0;u-2=0;y-1=0;y=2=0;e-1=0;ec-1=0;ei=0;ed=0;kp0=0;ki0=0;kd0=0;for k=1:1:1000Time(k)=k*ts;r(k)=1;%Using fuzzy inference to tunning PIDk-pid=evalfis([e-1,ec_1],a);kp(k)=kp_0+k_pid(1);ki(k)=ki_0+k_pid(2);kd(k)=kd_0+k_pid(3);u(k)=kp(k)*e_1+ki(k)*ei+kd(k)*ed;y(k)=-den(2)*y_1-den(3)*y_2+num(2)*u_1+num(3)*u_2;e(k)=r(k)-y(k);%%%%%%%%%%%%%%%%Return of parameters%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% u_2=u_1;u_1u(k)=0;y_2=y_1;y_12=y(2);ei=ei+e(k)*ts;ec(k)=e(k)-e_1;e_1=e(k);ec_1=ec(k);endfiure(1);plot(time,r,'r',time,y,'b:','linewidth',2);xlabel(time(s)');ylabel('r,y');legend('Ideal osition','Practical position');fiure(2);subplot(211);plot(time,kp,'r','linewidth',2);xlabel(time(s)');ylabel('kp');subplot(212);plot(time,ki,'r','linewidth',2);xlabel(time(s)');ylabel('ki');figure(3);plot(time,u,'r','linewidth',2);xlabel(time(s)');ylabel('control input');。