数码管时钟显示(含有原理图)
ds1302时钟数码管显示时分秒
ds1302时钟数码管显示时分秒单片机原理课程设计课题名称:基于DS1302的数码管显示数字钟专业班级:电子信息工程学生学号:0414070126学生姓名:张向阳指导教师:张云马崇霄设计时间:2010年6月21日--2010年6月25日目录摘要 ...................................................................................1 设计任务和要求 ...........................................................2 方案论证 .......................................................................3 系统硬件设计 ...............................................................3.1................................................................. 系统总原理图3.2元器件清单...................................................................................... ................................................3.3 PCB板图...................................................................................... .................................................3.4................................................................ P roteus仿真图3.5.......................................................... 分电路图及原理说明3.5.1 主控部分(单片机MCS-51)..............................................................................3.5.2 计时部分(实时时钟芯片DS1302)..................................................................3.5.3 显示部分(共阳极数码管)................................................................................3.5.4 调时部分(按键)................................................................................................4系统软件设计 ...............................................................4.1................................................................... 程序流程图4.2........................................................... 程序源代码5心得体会 ....................................................................... 6参考文献 ....................................................................... 7结束语 ...........................................................................基于DS1302的数码管显示数字钟设计摘要本次课程设计的是使用专门的时钟芯片DS1302在数码管上显示的数字电子钟,并能通过按键对其进行调时和校准。
实验二 数码管显示
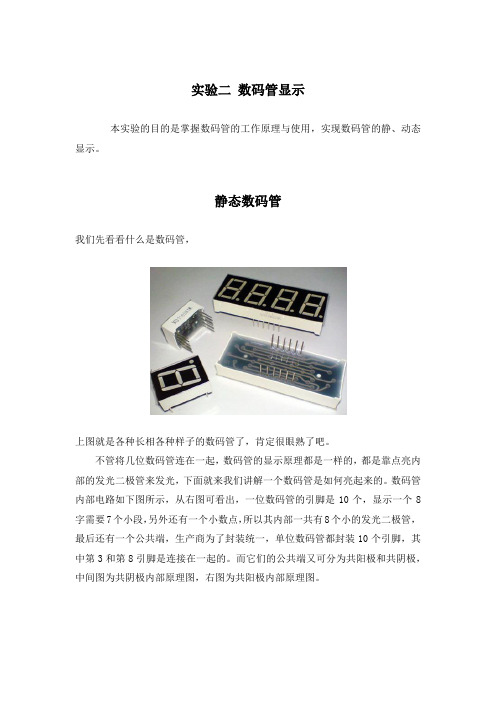
实验二数码管显示本实验的目的是掌握数码管的工作原理与使用,实现数码管的静、动态显示。
静态数码管我们先看看什么是数码管,上图就是各种长相各种样子的数码管了,肯定很眼熟了吧。
不管将几位数码管连在一起,数码管的显示原理都是一样的,都是靠点亮内部的发光二极管来发光,下面就来我们讲解一个数码管是如何亮起来的。
数码管内部电路如下图所示,从右图可看出,一位数码管的引脚是10个,显示一个8字需要7个小段,另外还有一个小数点,所以其内部一共有8个小的发光二极管,最后还有一个公共端,生产商为了封装统一,单位数码管都封装10个引脚,其中第3和第8引脚是连接在一起的。
而它们的公共端又可分为共阳极和共阴极,中间图为共阴极内部原理图,右图为共阳极内部原理图。
上图展出了常用的两种数码管的引脚排列和内部结构。
总所周知,点亮发光二极管就是要给予它足够大的正向压降。
所以点亮数码管其实也就是给它内部相应的发光二极管正向压降。
如上图左(一共a、b、c、d、e、f、g、DP 八段),如果要显示“1”则要点亮b、c 两段LED;显示“A”则点亮a、b、c、e、f、g 这六段LED;我们还知道,既然LED 加载的是正向压降,它的两端电压必然会有高低之分:如果八段LED 电压高的一端为公共端,我们称之为共阳极数码管(如上图中);如果八段LED 电压低的一段为公共端,则称之为共阴极数码管(上图右)。
所以,要点亮共阳极数码管,则要在公共端给予高于非公共端的电平;反之点亮共阴极数码管,则要在非公共端给予较高电平。
对共阴极数码来说,其8个发光二极管的阴极在数码管内部全部连接在一起,所以称“共阴”,而它们的阳极是独立的,通常在设计电路时一般把阴极接地。
当我们给数码管的任意一个阳极加一个高电平时,对应的这个发光二极管就点亮了。
如果想要显示出一个8字,并且把右下角的小数点也点亮的话,可以给8个阳极全部送高电平,如果想让它显示出一个0字,那么我们可以除了给第“g, dp”这两位送低电平外,其余引脚全部都送高电平,这样它就显示出0字了。
【CPLD EPM570】Verilog实现数码管电子时钟

Verilog实现数码管电子时钟1 原理图8位8段LED数码管,实现时钟的秒、分、小时、日期年月日的显示,其中主显示月、日、小时和分,按住按键S1显示年和秒;8x8的LED阵列显示秒的跳变,每一分钟点亮一圈,8位LED的跑马灯以1秒的频率移动;S1~S4按键实现时钟的设置,S1显示年和秒,S2选择设置的时钟段,S3实现设置数据的增加,S4跳出设置;4x4的矩阵按键,用了K1~K10共10个键,实现数据1~9、0的输入,可用于设置时钟(参考实例图)。
数码管显示的原理图如下,2个4位的8段数码管,组成的8位8段数码管,每个4位数码管的数据线独立,其实是可以以总线形式连接在一起的,可以减少IO。
共阳极的供电端用了三极管增加驱动,否则IO供电驱动多个数码管时有困难。
按键检测及跑马灯原理图如下,共5个按键,其中一个作为Reset按键(设计未加电容,可以考虑优化),每个按键采用一个IO检测,低电平表示有按键按下。
共8个LED灯,每个灯采用一个IO驱动,高电平点亮。
8x8的矩阵LED,行H1-H8为共阳,采用三极管增加驱动,但此实验板采用5V供电,因此无论行控制信号输出高电平或是低电平,都会导致LED有供电,只是供电强弱不一样,但都可能点亮LED,所以实现时需要将不供电时输出高阻z,同理对数据信号V1-V8。
此矩阵显示原理也是分时显示每一列数据,轮流显示速率较快,让人眼无法反映识别出来,避免闪烁。
4x4的矩阵按键,8个IO,检测原理是IO63、66、67、68作为输出信号,轮流赋值高电平,IO59、60、61、62作为输入信号,检测对应的按键按下。
比如,在IO68赋值高电平时,检测到IO59信号为高电平,则表示按键K1被按下,本时钟只用了10个按键,K1~K10。
2 CPLD代码module clock (clk_24m, //24M时钟reset_n, //全局异步复位/******************************************* 8位8段数码管显示接口信号*******************************************/ Bit_line,Data_line_h,Data_line_l,/******************************************* 8位跑马灯接口信号*******************************************/ led_Bit_line,/******************************************* S1-S5按键信号*******************************************/Key_line,/*******************************************8x8 LED数码管矩阵接口信号*******************************************/Hline,Vline,/*******************************************按键阵列接口信号*******************************************/Keyarray_Vline,Keyarray_Hline);input wire clk_24m;input wire reset_n;output wire [7:0] Hline;output wire [7:0] Vline;output wire [7:0] Bit_line;output wire [0:7] Data_line_h;output wire [0:7] Data_line_l;output wire [7:0] led_Bit_line;input wire [3:0] Key_line;input wire [3:0] Keyarray_Vline;output wire [2:0] Keyarray_Hline;/*************************************************************** 内部分频时钟,便于计数。
纯数字电路数字时钟原理图(免费)

做成时钟,并不难,把十进改成6进就行了如下:1,震荡电路的电容用晶震,记时准确.2, 时:用2块计数器,十位的用1和2(记时脚)两个脚.分:用2块计数器,十位的用1,2,3,4,5,6,(记时脚)6个脚.秒:同分.评论:74系列的集成块不如40系列的,如:用CD4069产生震荡,CD4017记数,译码外加.电压5V.比74LS160 74LS112 74LS00好的.而且CD4069外围元件及少.如有需要我可以做给你.首先需要产生1hz的信号,一般采用CD4060对32768hz进行14分频得到2hz,然后再进行一次分频。
(关于此类内容请参考数字电路书中同步计数器一章)(原文件名:4060.JPG)一种分频电路:(原文件名:秒信号1.JPG)采用cd4518进行第二次分频另一种可以采用cd4040进行第二次分频第三种比较麻烦,是对1mhz进行的分频(原文件名:秒信号2.JPG)介绍一下cd4518:CD4518,该IC是一种同步加计数器,在一个封装中含有两个可互换二/十进制计数器,其功能引脚分别为1~7和9~{15}。
该计数器是单路系列脉冲输入(1脚或2脚;9脚或10脚),4路BCD码信号输出(3脚~6脚;{11}脚~{14}脚)。
此外还必须掌握其控制功能,否则无法工作。
手册中给有控制功能的真值(又称功能表),即集成块的使用条件,如表2所示。
从表2看出,CD4518有两个时钟输入端CP和EN,若用时钟上升沿触发,信号由CP输入,此时EN端应接高电平“1”,若用时钟下降沿触发,信号由EN端输入,此时CP端应接低电平“0”,不仅如此,清零(又称复位)端Cr也应保持低电平“0”,只有满足了这些条件时,电路才会处于计数状态,若不满足则IC不工作。
计数时,其电路的输入输出状态如表3所示。
值得注意,因表3输出是二/十进制的BCD码,所以输入端的记数脉冲到第十个时,电路自动复位0000状态(参看连载五)。
另外,该CD4518无进位功能的引脚,但从表3看出,电路在第十个脉冲作用下,会自动复位,同时,第6脚或第{14}脚将输出下降沿的脉冲,利用该脉冲和EN端功能,就可作为计数的电路进位脉冲和进位功能端供多位数显用。
电子设计自动化(EDA)_数字时钟程序模块(LED数码管显示)_实验报告
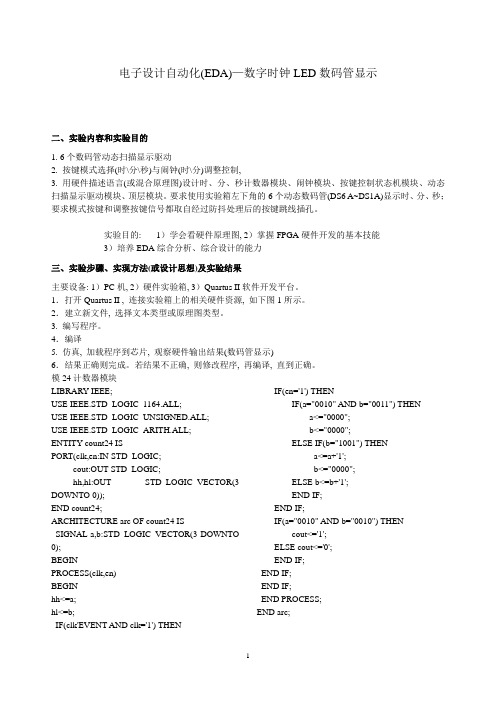
电子设计自动化(EDA)—数字时钟LED数码管显示二、实验内容和实验目的1. 6个数码管动态扫描显示驱动2. 按键模式选择(时\分\秒)与闹钟(时\分)调整控制,3. 用硬件描述语言(或混合原理图)设计时、分、秒计数器模块、闹钟模块、按键控制状态机模块、动态扫描显示驱动模块、顶层模块。
要求使用实验箱左下角的6个动态数码管(DS6 A~DS1A)显示时、分、秒;要求模式按键和调整按键信号都取自经过防抖处理后的按键跳线插孔。
实验目的: 1)学会看硬件原理图, 2)掌握FPGA硬件开发的基本技能3)培养EDA综合分析、综合设计的能力三、实验步骤、实现方法(或设计思想)及实验结果主要设备: 1)PC机, 2)硬件实验箱, 3)Quartus II软件开发平台。
1.打开Quartus II , 连接实验箱上的相关硬件资源, 如下图1所示。
2.建立新文件, 选择文本类型或原理图类型。
3. 编写程序。
4.编译5. 仿真, 加载程序到芯片, 观察硬件输出结果(数码管显示)6.结果正确则完成。
若结果不正确, 则修改程序, 再编译, 直到正确。
模24计数器模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;USE IEEE.STD_LOGIC_ARITH.ALL;ENTITY count24 ISPORT(clk,en:IN STD_LOGIC;cout:OUT STD_LOGIC;hh,hl:OUT STD_LOGIC_VECTOR(3 DOWNTO 0));END count24;ARCHITECTURE arc OF count24 ISSIGNAL a,b:STD_LOGIC_VECTOR(3 DOWNTO 0);BEGINPROCESS(clk,en)BEGINhh<=a;hl<=b;IF(clk'EVENT AND clk='1') THENIF(en='1') THENIF(a="0010" AND b="0011") THENa<="0000";b<="0000";ELSE IF(b="1001") THENa<=a+'1';b<="0000";ELSE b<=b+'1';END IF;END IF;IF(a="0010" AND b="0010") THENcout<='1';ELSE cout<='0';END IF;END IF;END IF;END PROCESS;END arc;模60计数器模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;USE IEEE.STD_LOGIC_ARITH.ALL;ENTITY count60 ISPORT(clk,en:IN STD_LOGIC;cout:OUT STD_LOGIC;hh,hl:OUT STD_LOGIC_VECTOR(3 DOWNTO 0));END count60;ARCHITECTURE arc OF count60 ISSIGNAL a,b:STD_LOGIC_VECTOR(3 DOWNTO 0);SIGNAL sout:STD_LOGIC;BEGINPROCESS(clk)BEGINhh<=a; hl<=b;IF(clk'EVENT AND clk='1') THENIF(en='1') THENIF(a="0101" AND b="1001") THENa<="0000";b<="0000";ELSE IF(b="1001") THENa<=a+'1';b<="0000";ELSE b<=b+'1';END IF;END IF;END IF;END IF;END PROCESS;sout<='1' WHEN a="0101" AND b="1001" ELSE '0';cout<=sout AND en;END arc;4-7显示译码模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;ENTITY segment4to7 ISPORT(s:IN STD_LOGIC_VECTOR(3 DOWNTO 0);a,b,c,d,e,f,g:OUT STD_LOGIC);END segment4to7;ARCHITECTURE arc OF segment4to7 IS SIGNAL y:STD_LOGIC_VECTOR(6 DOWNTO 0); BEGINa<= y(6);b<= y(5);c<= y(4);d<= y(3);e<= y(2); f<= y(1);g<= y(0);PROCESS(s)BEGINCASE s ISWHEN "0000"=>y<="1111110"; WHEN "0001"=>y<="0110000"; WHEN "0010"=>y<="1101101"; WHEN "0011"=>y<="1111001"; WHEN "0100"=>y<="0110011"; WHEN "0101"=>y<="1011011"; WHEN "0110"=>y<="1011111"; WHEN "0111"=>y<="1110000"; WHEN "1000"=>y<="1111111"; WHEN "1001"=>y<="1111011"; WHEN OTHERS=>y<="0000000"; END CASE;END PROCESS;END arc;带闹钟控制模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;ENTITY mode_adjust_with_alarm ISPORT (adjust,mode,clk1hz: IN STD_LOGIC;clkh,enh,clkm,enm,clks,enha: OUT STD_LOGIC;clkh_a,clkm_a:OUT STD_LOGIC;mode_ss: OUT STD_LOGIC_VECTOR(2 DOWNTO 0));END mode_adjust_with_alarm;ARCHITECTURE arc OF mode_adjust_with_alarm ISTYPE mystate IS (s0,s1,s2,s3,s4,s5);SIGNAL c_state,next_state: mystate;BEGINPROCESS (c_state)BEGINCASE c_state ISWHEN s0=> next_state <= s1; clkh<=clk1hz; clkm<=clk1hz; clks<=clk1hz;enh<='0'; enm<='0'; enha<='0'; clkh_a<= '0'; clkm_a<= '0'; mode_ss <="000";WHEN s1=> next_state <= s2; clkh<=adjust; clkm<= '0'; clks<='0';enh<='1'; enm<='0';enha<='0'; clkh_a<= '0';clkm_a<= '0'; mode_ss <="001";WHEN s2=> next_state <= s3; clkh<= '0'; clkm<=adjust; clks <= '0';enh<='0';enm<='1';enha<='0'; clkh_a<= '0'; clkm_a<= '0'; mode_ss <="010";WHEN s3=> next_state <= s4; clkh<= '0'; clkm<= '0'; clks<=adjust;enh<='0'; enm<='0';enha<='0'; clkh_a<= '0'; clkm_a<= '0'; mode_ss <="011";WHEN s4=> next_state <= s5; clkh<= clk1hz; clkm<= clk1hz; clks<=clk1hz;enh<='0';enm<='0';enha<='1'; clkh_a<=adjust; clkm_a<= '0'; mode_ss <="100";WHEN s5=> next_state <= s0; clkh<= clk1hz; clkm<= clk1hz; clks<=clk1hz;enh<='0'; enm<='0'; enha<='0'; clkh_a<= '0'; clkm_a<=adjust; mode_ss <="101";END CASE;END PROCESS;PROCESS (mode)BEGINIF (mode'EVENT AND mode='1') THENc_state<=next_state ;END IF;END PROCESS;END arc;扫描模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;ENTITY scan ISPORT(clk256hz:IN STD_LOGIC;ss:OUT STD_LOGIC_VECTOR(2 DOWNTO 0));END scan;ARCHITECTURE arc OF scan ISTYPE mystate IS (s0, s1,s2,s3,s4,s5);SIGNAL c_state,next_state: mystate;BEGINPROCESS ( c_state )BEGINCASE c_state ISWHEN s0=> next_state <=s1; ss<="010";WHEN s1=> next_state <=s2; ss<="011";WHEN s2=> next_state <=s3; ss<="100";WHEN s3=> next_state <=s4; ss<="101";WHEN s4=> next_state <=s5; ss<="110";WHEN s5=> next_state <=s0; ss<="111";END CASE;END PROCESS;PROCESS (clk256hz)BEGINIF (clk256hz'EVENT AND clk256hz='1') THENc_state<=next_state ;END IF;END PROCESS;END arc;复用模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;ENTITY mux ISPORT(hh,hl,mh,ml,sh,sl,hha,hla,mha,mla:IN STD_LOGIC_VECTOR(3 DOWNTO 0);ss,mode_ss:IN STD_LOGIC_VECTOR(2 DOWNTO 0);y:OUT STD_LOGIC_VECTOR(3 DOWNTO 0);alarm:OUT STD_LOGIC);END mux;ARCHITECTURE arc OF mux ISSIGNAL a,hhtmp,hltmp,mhtmp,mltmp,shtmp,sltmp:STD_LOGIC_VECTOR(3 DOWNTO 0);BEGINPROCESS(mode_ss)BEGINCASE mode_ss ISWHEN "000"=>hhtmp<=hh; hltmp<=hl; mhtmp<=mh; mltmp<=ml; shtmp<=sh; sltmp<=sl;WHEN "001"=>hhtmp<=hh; hltmp<=hl; mhtmp<=mh; mltmp<=ml; shtmp<=sh; sltmp<=sl;WHEN "010"=>hhtmp<=hh; hltmp<=hl; mhtmp<=mh; mltmp<=ml; shtmp<=sh; sltmp<=sl;WHEN "011"=>hhtmp<=hh; hltmp<=hl; mhtmp<=mh; mltmp<=ml; shtmp<=sh; sltmp<=sl;WHEN "100"=> hhtmp<=hha; hltmp<=hla; mhtmp<=mha; mltmp<=mla; shtmp<=sh; sltmp<=sl;WHEN "101"=> hhtmp<=hha; hltmp<=hla; mhtmp<=mha; mltmp<=mla; shtmp<=sh; sltmp<=sl;WHEN OTHERS=>hhtmp<="0000";hltmp<="0000";mhtmp<="0000";mltmp<="0000";shtmp<="0000";sltmp<="0000"; END CASE;END PROCESS;PROCESS(ss)BEGINCASE ss ISWHEN "010"=> a <=hhtmp;WHEN "011"=> a <=hltmp;WHEN "100"=> a <=mhtmp;WHEN "101"=> a <=mltmp;WHEN "110"=> a <=shtmp;WHEN "111"=> a <=sltmp;WHEN OTHERS => a <="0000";END CASE;y<=a;END PROCESS;alarm<='1' WHEN ((hh=hha)AND(hl=hla)AND(mh=mha)AND(ml=mla)) ELSE '0';END arc;闪烁模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;ENTITY blink_control ISPORT(ss,mode_ss:IN STD_LOGIC_VECTOR(2 DOWNTO 0);blink_en:OUT STD_LOGIC);END blink_control;ARCHITECTURE arc OF blink_control ISBEGINPROCESS (ss,mode_ss)BEGINIF(ss="010" AND mode_ss="001") THEN blink_en<='1';ELSIF(ss="011" AND mode_ss="001") THEN blink_en<='1';ELSIF(ss="100" AND mode_ss="010") THEN blink_en<='1';ELSIF(ss="101" AND mode_ss="010") THEN blink_en<='1';ELSIF(ss="110" AND mode_ss="011") THEN blink_en<='1';ELSIF(ss="111" AND mode_ss="011") THEN blink_en<='1';ELSIF(ss="010" AND mode_ss="100") THEN blink_en<='1';ELSIF(ss="011" AND mode_ss="100") THEN blink_en<='1';ELSIF(ss="100" AND mode_ss="101") THEN blink_en<='1';ELSIF(ss="101" AND mode_ss="101") THEN blink_en<='1';ELSE blink_en<='0';END IF;END PROCESS;END arc;Top文件LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;ENTITY design3 ISPORT (mode,adjust,clk1hz,clk2hz,clk256hz,clk1khz:IN STD_LOGIC;alarm,a,b,c,d,e,f,g:OUT STD_LOGIC;ss:OUT STD_LOGIC_VECTOR(2 DOWNTO 0));END design3;ARCHITECTURE arc OF design3 ISCOMPONENT mode_adjust_with_alarm PORT (adjust,mode,clk1hz: IN STD_LOGIC;clkh,enh,clkm,enm,clks,enha: OUT STD_LOGIC;clkh_a,clkm_a:OUT STD_LOGIC;mode_ss: OUT STD_LOGIC_VECTOR(2 DOWNTO 0));END COMPONENT;COMPONENT scan PORT (clk256hz:IN STD_LOGIC;ss:OUT STD_LOGIC_VECTOR(2 DOWNTO 0));END COMPONENT;COMPONENT segment4to7 PORT (s: IN STD_LOGIC_VECTOR(3 DOWNTO 0);a,b,c,d,e,f,g: OUT STD_LOGIC);END COMPONENT;COMPONENT mux PORT(hh,hl,mh,ml,sh,sl,hha,hla,mha,mla:IN STD_LOGIC_VECTOR(3 DOWNTO 0);ss,mode_ss:IN STD_LOGIC_VECTOR(2 DOWNTO 0);y:OUT STD_LOGIC_VECTOR(3 DOWNTO 0);alarm:OUT STD_LOGIC);END COMPONENT;COMPONENT blink_control PORT(ss,mode_ss:IN STD_LOGIC_VECTOR(2 DOWNTO 0);blink_en:OUT STD_LOGIC);END COMPONENT;COMPONENT count24 PORT (clk,en:IN STD_LOGIC;cout:OUT STD_LOGIC;hh,hl:OUT STD_LOGIC_VECTOR(3 DOWNTO 0));END COMPONENT;COMPONENT count60 PORT (clk ,en:IN STD_LOGIC;cout:OUT STD_LOGIC;hh,hl:OUT STD_LOGIC_VECTOR(3 DOWNTO 0));END COMPONENT;SIGNALclkh,enh,clkm,enm,clks,clkh_a,clkm_a,coutm,couts,coutm_en,couts_en,cout,vcc,coutma_en,coutma,alarm1,bli nk_en,blink_tmp,enha: STD_LOGIC;SIGNAL mode_ss,ss1:STD_LOGIC_VECTOR(2 DOWNTO 0);SIGNAL hh,hl,mh,ml,sh,sl,hha,hla,mha,mla,y,i:STD_LOGIC_VECTOR(3 DOWNTO 0);BEGINvcc<='1';coutm_en <= enh OR coutm;couts_en <= enm OR couts;coutma_en<= enha OR coutma;blink_tmp<=blink_en and clk2hz;i(3)<=y(3) OR blink_tmp;i(2)<=y(2) OR blink_tmp;i(1)<=y(1) OR blink_tmp;i(0)<=y(0) OR blink_tmp;ss<=ss1;alarm<=alarm1 AND clk1khz;u1:mode_adjust_with_alarmPORT MAP( adjust,mode,clk1hz,clkh,enh,clkm,enm,clks,enha,clkh_a,clkm_a,mode_ss);u2:count24 PORT MAP(clkh,coutm_en,cout,hh,hl);u3:count60 PORT MAP(clkm,couts_en,coutm,mh,ml);u4:count60 PORT MAP(clks,vcc,couts,sh,sl);u5:count24 PORT MAP(clkh_a,coutma_en,cout,hha,hla);u6:count60 PORT MAP(clkm_a,vcc,coutma,mha,mla);u7:mux PORT MAP(hh,hl,mh,ml,sh,sl,hha,hla,mha,mla,ss1,mode_ss,y,alarm1);u8:scan PORT MAP(clk256hz,ss1);u9:blink_control PORT MAP(ss1,mode_ss,blink_en);u10:segment4to7 PORT MAP(i,a,b,c,d,e,f,g);END arc;实验结果:数字钟包括正常的时分秒计时, 实验箱左下角的6个动态数码管(DS6 A~DS1A)显示时、分、秒。
第一讲 电子钟的组成及工作原理

多功能大尺寸LED 时钟显示屏的设计与制作LED 数码管时钟显示屏的组成及工作原理一、时钟显示屏的组成数码管时钟显示屏的组成电路如图所示:由电源电路,单片机最小系统,时钟电路,键盘电路,数码管驱动显示电路,温湿度检测电路,红外接收电路,光亮度检测电路,语音报时电路、电器控制电路,通讯电路等组成。
图3-1 多功能时钟显示屏的组成框图二、时钟显示屏的工作原理时钟显示屏以单片机为核心完成对时钟芯片DS1302管理和数码管的驱动显示控制。
数码管采用静态显示方式,由多片串入并出芯片74HC595(功能等同74HC164)级联的方式进行驱动。
通过温湿度传感器实现温湿度的检测,红外接收电路完成无线调表和多种定时等时钟功能的设置,用按键也可实现时钟调整等以及各种时钟功能的设定。
光亮传感器可以监测环境明暗,实时调整数码管的显示亮度。
语音报时电路实现语音报时,电器控制电路可实现家用电器的定时控制或者上课打铃的控制等,通讯电路可进行有线、无线通讯、控制等。
单片机最小系统数码管红外接收电路键盘电路温湿度传感器光亮检测电路驱动电路语音报时电路通讯电路电器控制电路扩展接口时钟电路功能与特点一、功能:1、年、月、日、时、分、秒、星期;2、温度、湿度检测与显示;3、农历日期的显示;4、手动按键调表;5、红外遥控器调表;6、预留光亮度检测及显示亮度的自动调整;7、预留继电器控制(10A,可实现定时打铃、家电定时控制等);8、预留语音报时和音乐报时功能;9、预留RS232和485串行通讯接口,实现与微机通讯或者远程通讯;10、预留蜂鸣器提示音功能;11、预留无线通讯接口,可实现无线通讯;12、预留I/O接口,方便今后功能扩展。
13、电源保护电路,防止电源反接烧坏路线板元件;二、特点:1、大尺寸,由1.5~2.3寸数码管显示;2、农历、星期能尾随日期变化自动调整;3、采用时钟芯片和备用电池,走时准确,断电不影响计时;4、静态显示工作模式,延长时钟显示屏使用寿命;5、采用新型单片机功能更强、速度更快;6、硬件设计功能丰富;7、可实现数码管显示亮度随环境明暗自动调节,人性化设计,使用舒适;8、可实现多种显示模式,以实现节能目的;9、软件开辟可实现多种扩展功能;10、插接件接口设计,便于组装、维护。
项目六数码管显示原理分解

项目六 数码管显示原理学习目的:1. 介绍 STC89C51的数码管显示的原理;2. 掌握单个数码管静态显示的原理;3. 熟悉四位一体数码管动态显示的原理;4. 掌握单片机数码管显示的 C51 程序编程。
常用的 LED 显示器有 LED 状态显示器(俗称发光二极管) 、 LED 七段显示器(俗称数码 管)和 LED 十六段显示器。
发光二极管可显示两种状态, 用于系统状态显示;数码管用于数 字显示; LED 十六段显示器用于字符显示。
一、数码管简介1.数码管的结构数码管由 8 个发光二极管 (以下简称字段) 构成,通过不同的组合可用来显示数字 0 ~9、 字符 A ~F 、H 、L 、P 、R 、U 、Y 、符号“ -”及小数点“ .”。
数码管的外形结构如下图所示。
数码管又分为共阴极和共阳极两种结构。
常用的 LED 显示器为 8 段(或 7 段,8 段比 7段多 了一个小数点“ dp ”段) 。
有共阳极和共阴极两种 其结构如下图所示:图 6-1 数码管结构图2.数码管工作原理共阳极数码管的 8 个发光二极管的阳极(二极管正端)连接在一起。
通常,公共阳极接 高电平(一般接电源) ,其它管脚接段驱动电路输出端。
当某段驱动电路的输出端为低电平 时,则该端所连接的字段导通并点亮。
根据发光字段的不同组合可显示出各种数字或字符。
此时,要求段驱动电路能吸收额定的段导通电流, 还需根据外接电源及额定段导通电流来确 定相应的限流电阻。
共阴极数码管的 8 个发光二极管的阴极(二极管负端)连接在一起。
通常,公共阴极接 低电平 (一般接地),其它管脚接段驱动电路输出端。
当某段驱动电路的输出端为高电平时, 则该端所连接的字段导通并点亮, 根据发光字段的不同组合可显示出各种数字或字符。
此时, 要求段驱动电路能提供额定的段导通电流, 还需根据外接电源及额定段导通电流来确定相应 的限流电阻。
3.数码管字形编码要使数码管显示出相应的数字或字符, 必须使段数据口输出相应的字形编码。
LED七段数码管数字钟
设 计 题 目: LED 七段数码管数字钟 学 院 名 称: 计算机科学与工程学院 专 业: 计算机科学与技术 班 级: 05计1 姓 名: 丁 琳 指导教师姓名: 白凤娥 指导教师职称: 教 授设 计 成 绩: 评 阅 教 师: 评 阅 日 期:2008年 12月 日微机原理与接口技术课程设计报告JIANGSU TEACHERS UNIVERCITY OF TECHNOLOGY目录一、设计任务书 (3)二、设计题目 (3)三、设计方案 (3)四、硬件原理 (4)1.七段数码管显示 (4)2.键盘扫描显示 (5)3.8253计数器和8259中断 (6)4.硬件连接 (6)五、程序流程图及程序清单 (7)1.七段数码管显示 (8)2. 键盘扫描显示 (9)3.定时器设计 (12)4.总程序设计 (15)六、调试过程及结果 (29)七、设计总结和体会 (30)八、参考文献 (30)一、设计任务书《微机原理及接口技术》是一门应用性、综合性、实践性较强的课程,没有实际的有针对性的设计环节,我们就不能很好的理解和掌握所学的技术知识,更缺乏解决实际问题的能力。
所以通过有针对性的课程设计,会使我们学会系统地综合运用所学的理论知识,提高我们在微机应用方面的开发与设计本领,系统的掌握微机硬软件设计方法。
通过课程设计实践,不仅要培养我们的实际动手能力,检验我们对本门课学习的情况,更要培养我们在实际的工程设计中查阅专业资料、工具书或参考书,掌握工程设计手段和软件工具,并能用设计报告表达设计思想和结果的能力。
培养我们实事求是和严肃认真的工作态度。
通过设计过程,要求我们熟悉和掌握微机系统的软件、硬件设计的方法、设计步骤,使我们得到微机开发应用方面的初步训练。
集体讨论设计题目的总体设计方案、编程、软件硬件调试、编写设计报告等问题,真正做到理论联系实际,提高动手能力和分析问题、解决问题的能力,实现由学习知识到应用知识的初步过渡。