基于MATLAB的平面刚架静力分析
基于Matlab的变载荷刚架力学计算实验报告
基于Matlab的变载荷刚架力学计算实验报告姓名:L.H.M学号:专业名称:机械理论设计二〇二二年XX月目录一、实验要求 (1)二、实验内容 (1)三、实验数据 (1)四、实验目的 (1)五、计算方法及算法流程 (1)(一)力学法 (1)(二)有限元法 (4)六、实验结果与分析 (9)七、 Matlab代码清单 (10)(一)力学法的Matlab代码清单 (10)(二)有限元法的Matlab代码清单 (16)八、参考文献 (19)一、实验要求1、利用力学的方法,求变载荷作用下的悬臂刚梁的外力、变形和应力2、利用有限元的方法,求变载荷作用下的悬臂刚梁的外力、变形和应力二、实验内容如图1,悬臂刚梁结构。
AB段与BC段长度均为l,BC段上受到均布荷载q 的作用、且AB或BC段上还受到垂直于杆件的集中力F的作用(均布荷载q的大小与方向以及力F的作用位置、大小与方向可以自行定义)。
试编写程序,通过输入以上结构尺寸参数与荷载参数数值,绘制对应结构的剪力图、弯矩图和变形图。
图1 悬臂刚梁结构三、实验数据已知:1、刚架尺寸L=2 m(输入可变)2、均匀分布载荷q=20 kN/m(输入可变)3、集中力F=100 kN(输入可变)4、集中力距B点位置(输入可变)5、刚架的截面尺寸为a×a=100×100 mm(输入可变)6、刚架的材料为Q235-A四、实验目的1、熟悉matlab数学软件的操作2、掌握数学建模的基本方法3、会用基本的数学软件解决力学基本问题4、熟悉数学方法解决问题的流程五、计算方法及算法流程(一)力学法由理论力学知识,悬臂刚梁结构可以拆成两个杆体(即横杆BC和竖杆AB),得到如下受力图(图1-b,图1-c)由平衡方程,我们可以得到横杆BC图1-c中的D点处和B点处的弯曲、剪力和应力,以及竖杆AB图1-b中的B点处和A点处的弯曲、剪力和应力。
D点处:M D=q·(l-x)²/2;Q D=F+q·(l-x)/2;σD=6M D/a³;τD=Q D/a²B点处:M B=F·x+q·l²/2;Q B=F+q·l/2;σB=6M B/a³;τB=Q B/a²B点处:M’B=-M B;Q’B=-Q BA点处:M A=-M B;R Ax=0;R Ay=Q B;σA=6M A/a³;σAB=Q B/a²有了上述分析,就可以用matlab来计算并绘制刚架结构图、弯矩图、剪力图、应力图等。
基于Matlab的平面机构分析解析法
分类号 密级: UDC
第9讲 Matlab静力学求解

my_function 是函数名 p1, p2是参数名
例1 运用前面介绍的几个命令, 求以下力系的主矢和主矩
R i 1 Fi Fx i + Fy j Fz k
n
MO i 1 MO (Fi ) i 1 ri Fi
n n
正方体ABCD-EFGH边为a DA、HB、CG受力作用 大小均为P 求力系的主矢 力系对E点和对G点的矩
这是命令行
数组x=[1 2 3 4],若要求其中每个数的平方值: 输入:x.^2结果是?
正确结果
12
4)常用函数
sqrt(x) 开平方
abs(x) 绝对值
abs(3-4i)
exp(x) ex; log(x) 以e为底,x的对数 log(exp(2))
round(x)取整
syms x; 定义x为符号变量
M文件还可以写函数 例如前面的命令, dot, cross等,都是函数
M文件的函数,请见王沫然的书第五章
M文件函数的要点总结: 1. 函数名的形式:result = my_function(p1, p2) 2. 函数名与文件名一致,如my_function.m 3. 变量有局部变量,全局变量之分 result 是函数返回的结果
一点说明: matlab使用了非常高深的数学知识,若想了解内涵,则要看数值分析的 内容,若只看自带的帮助是学不来的内涵的,需要数学基础。 自带的帮助只是学习命令是干啥的,怎么调用命令
20
M文件
在命令行里写命令,写完就丢失了! 将命令保存到一个文件中,以.m结束,即M文件
相当于C或C++的.cpp文件
13
5)构造矩阵
(1)简单创建方法 row = [e1,e2,…,em]; A = [row1;row2;…;rown]
工程构件受力和刚度计算的MATLAB分析法
工程构件受力和刚度计算的MATLAB分析法工程构件受力和刚度计算是结构设计和分析中非常重要的一部分,它涉及到对构件受力和刚度进行计算的理论基础和方法。
而MATLAB作为一种广泛应用于科学计算和工程领域的软件工具,其强大的数学和算法功能使得其成为进行工程构件受力和刚度计算的理想选择。
在进行工程构件的受力和刚度计算时,首先需要建立合适的受力与形变模型。
其次,需要根据受到的外力和形变条件,建立构件的力平衡方程和形变方程。
最后,利用MATLAB的数值计算功能,对这些方程进行求解,以获得构件的受力和刚度。
在进行受力计算时,常用的方法包括静力方法、动力方法和有限元方法等。
其中,静力方法基于构件的受力平衡条件,通过求解受力方程组得到构件的受力分布。
动力方法则基于构件的振动特性,利用动力学方程求解得到构件的受力状态。
而有限元方法则是将结构离散为有限数量的单元,通过求解单元的刚度矩阵和载荷矩阵得到整个结构的受力情况。
在进行刚度计算时,常用的方法包括弹性刚度法和刚度矩阵法等。
其中,弹性刚度法是基于构件材料的弹性行为,通过求解弹性力学方程得到构件的刚度。
刚度矩阵法则是将结构离散为有限数量的节点,通过求解节点的刚度矩阵和载荷矩阵得到整个结构的刚度。
利用MATLAB进行工程构件受力和刚度计算时,用户可以编写自定义的函数和脚本来实现对受力和刚度方程的求解。
MATLAB提供了丰富的数学函数和工具箱,包括线性方程组的求解、特征值和特征向量的计算、矩阵运算等功能,这些功能可以大大简化受力和刚度计算的过程。
用户可以使用MATLAB的函数库来进行构件的受力和刚度计算,也可以根据实际需要进行函数的编写和修改。
总之,MATLAB分析法在工程构件受力和刚度计算中具有广泛的应用前景。
它通过提供强大的数学和算法功能,简化了受力和刚度计算的过程,并且可以根据实际需要进行函数的编写和修改。
工程师和科研人员可以利用MATLAB进行受力和刚度计算,以实现对工程构件的准确设计和分析。
根据MATLAB的平面刚架静力分析
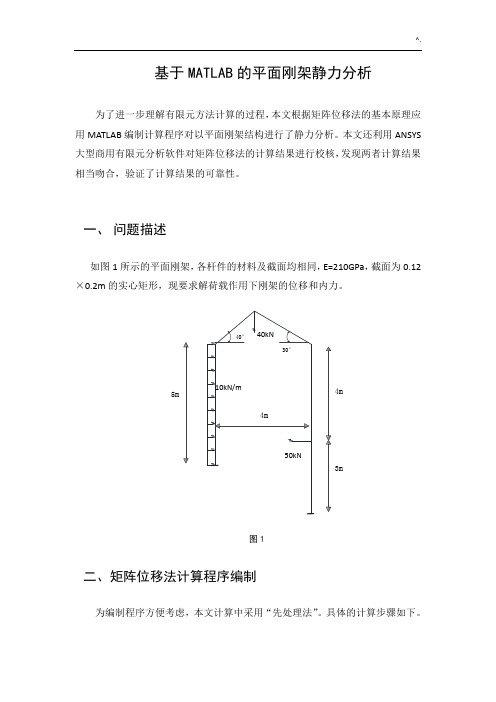
基于MATLAB 的平面刚架静力分析为了进一步理解有限元方法计算的过程,本文根据矩阵位移法的基本原理应用MATLAB 编制计算程序对以平面刚架结构进行了静力分析。
本文还利用ANSYS 大型商用有限元分析软件对矩阵位移法的计算结果进行校核,发现两者计算结果相当吻合,验证了计算结果的可靠性。
一、 问题描述如图1所示的平面刚架,各杆件的材料及截面均相同,E=210GPa ,截面为0.12×0.2m 的实心矩形,现要求解荷载作用下刚架的位移和内力。
5m4m3m图1二、矩阵位移法计算程序编制为编制程序方便考虑,本文计算中采用“先处理法”。
具体的计算步骤如下。
(1) 对结构进行离散化,对结点和单元进行编号,建立结构(整体)坐标系和单元(局部)坐标系,并对结点位移进行编号; (2) 对结点位移分量进行编码,形成单元定位向量e λ;(3) 建立按结构整体编码顺序排列的结点位移列向量δ,计算固端力e F P 、等效结点荷载E P 及综合结点荷载列向量P ;(4) 计算个单元局部坐标系的刚度矩阵,通过坐标变换矩阵T 形成整体坐标系下的单元刚度矩阵e T e K T K T = ; (5) 利用单元定位向量形成结构刚度矩阵K ; (6) 按式1=K P δ- 求解未知结点位移; (7) 计算各单元的杆端力e F 。
根据上述步骤编制了平面刚架的分析程序。
程序中单元刚度矩阵按下式计算。
3232223232220000126126006462000001261260062640EAEA ll EI EIEI EI l l l l EI EI EI EI l l l l K EA EA l l EI EI EI EI l l l l EI EI EI EI l ll l ⎡⎤-⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥=⎢⎥-⎢⎥⎢⎥⎢⎥---⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦^.转换矩阵则按下式计算。
cos sin 0000sin cos 0000001000000cos sin 0000sin cos 001T αααααααα⎡⎤⎢⎥-⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦计算程序框图如图2所示,具体的程序代码见附录1。
Matlab辅助工程静力学分析
V0 . 8 No 12 .1
M8 . 0 0 2 2 1 "
Ma a t b辅 助 工 程 静 力 学分 析 l
曾德 惠
( 湖北 民族 学 院 理 学院 , 北 恩施 4 5 0 ) 湖 4 oo
摘要 : 以静 力学中的核 心 内容( 力系简化和 力系平衡 ) 为研 究对 象, 绍 了力学模 型和数 学模型 的建 立过程 以 介 及 Maa d b软件 编程 方法. 结合具体 实例 , 编制 了计算机辅助静 力计 算的通 用子程序 . 结果表 明 : 用 Ma a 利 tb解 决工 l 程静力计算 问题快捷、 准确 和有效 , 高了学生和设计人 员利 用计 算机解决 实际问题 的能力 , 提 为处理类似 计算提供 了有效的参考. 关键 词 : 力学; d b 力 系的简化 ; 系的平衡 静 Maa ; 力 中图分类号 :P 9 . ;B 2 T 3 19 T 1 1 文献标识码 : A 文章编号 :08 82 (0 0 0 — 0 2 0 10 — 4 3 2 1 ) 1 0 7 — 4
Co p e -ade m ut r i d Anay i fEn i e rng St tc s d o a l b lsso g n e i a is Ba e n M ta
ZE G De- i hu
( h o o cec , b i nvr t f ai a t sE si4 00 C a c S ol f i eHue U esy o N t n ie, nh 50 ,  ̄n ) S n i i r ol i 4
第2 第1 8卷 期 21 0 0年 3月
湖北民族学院学报( 自然 科 学 版 ) Junl f u e U ie i r aoat sN tr c neE io ) ora o bi nvr tf tn ie( a a Si c d i H sy o N i l i ul e tn
利用Matlab求解如下静力学题目
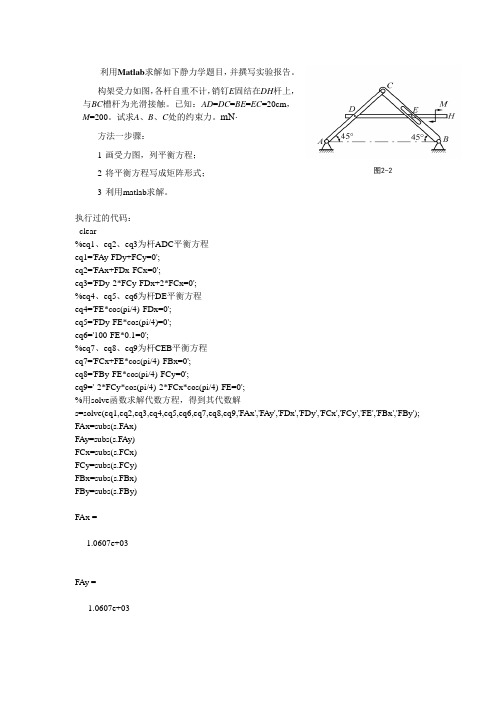
利用Matlab求解如下静力学题目,并撰写实验报告。
构架受力如图,各杆自重不计,销钉E固结在DH杆上,与BC槽杆为光滑接触。
已知:AD=DC=BE=EC=20cm,M=200。
试求A、B、C处的约束力。
mN⋅方法一步骤:1 画受力图,列平衡方程;图2-22 将平衡方程写成矩阵形式;3 利用matlab求解。
执行过的代码:clear%eq1、eq2、eq3为杆ADC平衡方程eq1='FAy-FDy+FCy=0';eq2='FAx+FDx-FCx=0';eq3='FDy-2*FCy-FDx+2*FCx=0';%eq4、eq5、eq6为杆DE平衡方程eq4='FE*cos(pi/4)-FDx=0';eq5='FDy-FE*cos(pi/4)=0';eq6='100-FE*0.1=0';%eq7、eq8、eq9为杆CEB平衡方程eq7='FCx+FE*cos(pi/4)-FBx=0';eq8='FBy-FE*cos(pi/4)-FCy=0';eq9='-2*FCy*cos(pi/4)-2*FCx*cos(pi/4)-FE=0';%用solve函数求解代数方程,得到其代数解s=solve(eq1,eq2,eq3,eq4,eq5,eq6,eq7,eq8,eq9,'FAx','FAy','FDx','FDy','FCx','FCy','FE','FBx','FBy'); FAx=subs(s.FAx)FAy=subs(s.FAy)FCx=subs(s.FCx)FCy=subs(s.FCy)FBx=subs(s.FBx)FBy=subs(s.FBy)FAx =-1.0607e+03FAy =1.0607e+03FCx =-353.5534FCy =-353.5534FBx =353.5534FBy =353.5534M=200;L=0.2;%M的单位为N*m,L单位为m A=[1 0 0 0 -1 0 1 0 00 1 0 0 0 -1 0 1 00 0 0 0 -2 2 1 -1 00 0 0 0 0 0 -2 0 sqrt(2)0 0 0 0 0 0 0 -2 sqrt(2)0 0 0 0 0 0 0 0 -10 0 -2 0 2 0 0 0 -sqrt(2)0 0 0 -2 0 2 0 0 -sqrt(2)0 0 0 0 sqrt(2) sqrt(2) 0 0 -1];B=[0;0;0;0;0;M/L;0;0;0];x=inv(A)*B复摆研究%%%%%子函数function ydot=fubai(t,y) global m g a Jydot=[y(2)-m*g*a*sin(y(1))/J]; %%%%%主函数global m g a J fm=1;g=9.8;a=2;J=3;f=pi/4;tmax=100;step=0.01;[t,y]=ode45('fubai',[0:step:tmax],[f,0]); subplot(2,2,1);plot(t,y)subplot(2,2,2);plot(t,y(:,1))。
平面连杆机构运动分析&动态静力分析及机械运动方程求解的Matlab语言m文件使用说明及算例

构件上点的运动分析函数文件(m文件)格式:function [ 输出参数] = 函数名(输入参数)p_crank.m function [p_Nx,p_Ny]=p_crank(Ax,Ay,theta,phi,l1)v_crank.m function [v_Nx,v_Ny]=v_crank(l1,v_Ax,v_Ay,omiga,theta,phi)a_crank.m function [a_Nx,a_Ny]=a_crank(l1,a_Ax,a_Ay,alpha,omiga,theta,phi)函数中的符号说明函数文件(m 文件)格式: function [ 输出参数 ] = 函数名( 输入参数 )p_RRR.m function [cx,cy,theta2,theta3]=p_RRR(bx,by,dx,dy,l2,l3,m)v_RRR.m function [vcx,vcy,omiga2,omiga3]=v_RRR(vbx,vby,vdx,vdy,cx,cy,bx,by,dx,dy)a_RRR.m function [acx,acy,alpha2,alpha3]=a_RRR(abx,aby,adx,ady,cx,cy,bx,by,dx,dy,omiga2,omiga3)函数中的符号说明m =1 m = -1RRR Ⅱ级杆组运动分析函数文件(m 文件)格式: function [ 输出参数 ] = 函数名( 输入参数 )p_RRP.m function [cx,cy,sr,theta2]=p_RRP(bx,by,px,py,theta3,l2,m)v_RRP.m function [vcx,vcy,vr,omiga2]=v_RRP(bx,by,cx,cy,vbx,vby,vpx,vpy,theta2,theta3,l2,sr,omiga3) a_RRP.m function [acx,acy,ar,alpha2]=a_RRP(bx,by,cx,cy,px,py,abx,aby,apx,apy,theta3,vr,omiga2,omiga3,alpha3)函数中的符号说明1 1∠BCP < 90︒,∠BC 'P > 90︒,m =1RRP Ⅱ级杆组运动分析函数文件(m 文件)格式: function [ 输出参数 ] = 函数名( 输入参数 )p_RPR.m function [dx,dy,sr,theta3]=p_RPR(bx,by,cx,cy,e,l3,m)v_RPR.m function [vdx,vdy,omiga3,vr]=v_RPR(bx,by,cx,cy,dx,dy,vcx,vcy,vbx,vby,theta3) a_RPR.m function [adx,ady,alpha3,ar]=a_RPR(bx,by,cx,cy,dx,dy,acx,acy,abx,aby,vr,omiga3,theta3)RPR Ⅱ级杆组运动分析实线位置,m =1 虚线位置,m = -1函数文件(m 文件)格式: function [ 输出参数 ] = 函数名( 输入参数 )F_RRR.m function [R12x,R12y,R23x,R23y,R34x,R34y]=F_RRR(bxy,cxy,dxy,s2,s3,m2,m3,Js2,Js3,M2,M3,F2,F3,as2,as3,alpha2,alpha3)RRR Ⅱ级杆组力分析R 23xF 2R F 3xR 23函数文件(m 文件)格式: function [ 输出参数 ] = 函数名( 输入参数 )F_RRP.m function [R12x,R12y,R23x,R23y,R34x,R34y,lcn]=F_RRP(bxy,cxy,s2,s3,m2,m3,Js2,Js3,M2,M3,F2,F3,theta3,as2,as3,alpha2,alph3)RRP Ⅱ级杆组力分析R 34函数文件(m 文件)格式: function [ 输出参数 ] = 函数名( 输入参数 )F_RPR.m function [R12x,R12y,R23x,R23y,R35x,R35y,lcn]=F_RRP(bxy,cxy,dxy,s2,s3,m2,m3,Js2,Js3,M2,M3,F2,F3,R34,theta3,as2,as3,alpha3)RPR Ⅱ级杆组力分析238. 作用有平衡力的构件力分析作用有平衡力的构件力分析函数文件(m文件)格式:function [ 输出参数] = 函数名(输入参数)F_Bar.m function [R01x,R01y,Mb]=F_Bar(axy,bxy,s1,m1,Js1,M1,F1,R12,as1,alpha1)函数中的符号说明9. 平面连杆机构运动分析算例例1图示曲柄摇杆机构,已知l 1=150mm ,l 2=220mm ,l 3=250mm ,l 4=300mm ,曲柄以n 1=100r/min 逆时针匀速转动,分析该机构的运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于MATLAB 的平面刚架静力分析
为了进一步理解有限元方法计算的过程,本文根据矩阵位移法的基本原理应用MATLAB 编制计算程序对以平面刚架结构进行了静力分析。
本文还利用ANSYS 大型商用有限元分析软件对矩阵位移法的计算结果进行校核,发现两者计算结果相当吻合,验证了计算结果的可靠性。
一、 问题描述
如图1所示的平面刚架,各杆件的材料及截面均相同,E=210GPa ,截面为0.12×0.2m 的实心矩形,现要求解荷载作用下刚架的位移和内力。
5m
4m
3m
图1
二、矩阵位移法计算程序编制
为编制程序方便考虑,本文计算中采用“先处理法”。
具体的计算步骤如下。
(1) 对结构进行离散化,对结点和单元进行编号,建立结构(整体)坐标系
和单元(局部)坐标系,并对结点位移进行编号; (2) 对结点位移分量进行编码,形成单元定位向量e λ;
(3) 建立按结构整体编码顺序排列的结点位移列向量δ,计算固端力e F P 、等
效结点荷载E P 及综合结点荷载列向量P ;
(4) 计算个单元局部坐标系的刚度矩阵,通过坐标变换矩阵T 形成整体坐标
系下的单元刚度矩阵e T e K T K T = ; (5) 利用单元定位向量形成结构刚度矩阵K ; (6) 按式1=K P δ- 求解未知结点位移; (7) 计算各单元的杆端力e F 。
根据上述步骤编制了平面刚架的分析程序。
程序中单元刚度矩阵按下式计算。
32322
23
2
32
22
0000
1261260
064620
00001261260062640
EA
EA l
l EI EI
EI EI l l l l EI EI EI EI l l l l K EA EA l l EI EI EI EI l l l l EI EI EI EI l l
l l ⎡⎤-
⎢⎥⎢
⎥⎢⎥-
⎢⎥
⎢
⎥⎢⎥-
⎢⎥⎢
⎥=⎢⎥-⎢⎥
⎢
⎥⎢⎥---⎢⎥⎢
⎥⎢⎥-⎢⎥⎣
⎦
转换矩阵则按下式计算。
cos sin 0000sin cos 0000001000000cos sin 0000sin cos 00
1T ααααααα
α⎡⎤⎢⎥-⎢⎥⎢⎥=⎢
⎥⎢⎥⎢⎥-⎢⎥⎣⎦
计算程序框图如图2所示,具体的程序代码见附录1。
图2 MATLAB矩阵分析法程序框图
三、解题步骤
取整体坐标系如图3所示,对结构进行离散化,对结点和单元进行编号如图4所示,局部坐标系用单元中箭头的方向表示,原始数据如下:
1
3
4
5
6
⑤
图3 图4 刚架结点输入矩阵为,
x=[0 0;0 -5;1.63 -6.37;4 -5;4 -1;4 2];
各单元定位向量为,
locvec1=[1 2 3 0 0 0];
locvec2=[1 2 3 4 5 6];
locvec3=[4 5 6 7 8 9];
locvec4=[7 8 9 10 11 12];
locvec5=[10 11 12 0 0 0];
输入截面参数,
E=2.1e11;%E=210GPa
a=0.12; %矩形截面长0.12m
b=0.2; %矩形截面宽0.2m
输入整体坐标系下各单元结点荷载列阵,
f(1,:)=zeros(1,6);
f(2,:)=[0 0 0 0 40e3 0];
f(3,:)=zeros(1,6);
f(4,:)=[0 0 0 -50e3 0 0];
f(5,:)=zeros(1,6);
输入整体坐标系下单元1等效节点荷载
q=10e3; %10kN/m
fe=[0.5*q*l(1),0,-q*l(1)^2/12,0.5*q*l(1),0,q*l(1)^2/12];
由此计算得到平面刚架整体坐标系下的结点位移(m),
d=
0.0035
0.0000
-0.0004
0.0030
-0.0005
-0.0004
0.0027
0.0000
0.0016
-0.0051
0.0000
-0.0006
各个单元的杆端力如表1所示,
表1 各单元杆端力
四、计算结果校核
在ANSYS中使用beam3单元,按照如图4所示的离散结构建立平面刚架模型施加约束和荷载,得到的有限元模型如图5所示。
计算分析后得到结构的轴力图、剪力图和弯矩图如图6、7、8所示,命令流见附录2。
图5 有限元模型图6 轴力图(kN)
图7 剪力图(kN)
图8 弯矩图(kN·m)
从ANSYS计算结果中提取各结点位移、内力,并与矩阵位移法分析的结果比较,得到表2、3。
节点号项目矩阵位移法ANSYS 误差
1
Ux(m) 0 0 0 Uy(m) 0 0 0 Rotz(rad) 0 0 0
2 Ux(m) 0.003478 0.00348 -2E-06
Uy(m) 0.0000174 0.0000174 0
表3 各结点内力比较
由表2、表3的结果对比可知,两种方法的计算结果十分接近,误差均可以忽略不计,从而验证了计算结果的可靠性与准确性。
四、结论
通过对一个平面刚架静力分析问题的求解,本文编制的平面刚架静力分析程序计算结果与有限元软件ANSYS计算结果校核后,发现两者计算结果十分接近,误差可忽略不计,说明该程序计算结果的可靠性与精确性。
附录1 矩阵位移法计算程序
附录2 ANSYS建模计算命令流finish
/clear
/prep7
B=0.120$H=0.200$E=210000000
et,1,beam3
mp,ex,1,E
mp,prxy,1,0.3
r,1,B*H,B*H*H*H/12,H
k,1
k,2,0,5
k,3,1.6304,6.3681
k,4,4,5
k,5,4,1
k,6,4,-2
*set,i
*do,i,1,5
l,i,i+1
*enddo
lesize,all,0.5
latt,1,1,1
lmesh,all
dk,1,all
dk,6,all
fk,3,fy,-40
fk,5,fx,-50
lsel,s,,,1
esll,s
sfbeam,all,1,pres,10
allsel,all
dtran
ftran
sftran
/pbc,all,,2
/psf,pres,norm,2,0,1
eplot
/solu
solve
/post1
/pbc,u,,1 !显示支座约束符号,并图形显示变形pldisp,1 !将当前主要结果列表显示
presol,elem
!/pnum,sval,1
etable,mi,smisc,6
etable,mj,smisc,12
plls,mi,mj,-1 !弯矩图kN.m
etable,qi,smisc,2
etable,qj,smisc,8
plls,qi,qj,-1 !剪力图kN
etable,ni,smisc,1
etable,nj,smisc,7
plls,ni,nj,1 !轴力图kN。