新一代大射电望远镜馈源舱索支撑系统的优化设计
m球反射面射电望远镜FAST

3、执行器
射电望远镜主动反射面控制系统中的执行器主要包括液压装置、电动装置和气 动装置等。这些执行器能够根据控制器的指令对反射面进行精确的调整,以保 证望远镜的观测精度。
三、射电望远镜主动反射面控制 技术的优势
射电望远镜主动反射面控制技术具有以下优势:
1、提高观测精度:通过对反射面的精确调整,能够有效地提高射电望远镜的 观测精度。
m球反射面射电望远镜FAST
目录
01 一、FAST的构造与原 理
02 二、FAST的特点
03 三、FAST的科学价值
04 四、FAST的社会价值
05 五、未来展望
06 参考内容
标题:500米球反射面射电望远镜FAST:探索宇宙的巨眼
FAST,全名为"500米球反射面射电望远镜",是中国自主研发的全球最大单口 径射电望远镜。它像一只巨大的"天眼",用其强大的观测能力,帮助人类探索 未知的宇宙。
一、FAST的构造与原理
FAST由钢构支撑的铝制球面反射面、馈源舱和接收机等主要部分构成。球面反 射面呈球形,半径为500米,这是世界上最大的单口径射电望远镜。馈源舱是 一个可移动的舱体,装有无线接收器和精准指向装置,负责收集球面反射面反 射回来的射电波,并将射电波指向需要观测的天区。接收机则是处理和分析射 电波的设备,把微弱的射电波转化为数据,供科学家们研究。
二、FAST的特点
1、巨型球面反射面:FAST的球面反射面使其具有更大的观测面积和更高的灵 敏度,可以捕捉到更远、更微弱的射电信号。
2、可移动馈源舱:馈源舱的可移动性使其能随时调整方向,对不同天区进行 观测。
3、高精度指向技术:馈源舱的指向装置采用了先进的航天技术,能将射电波 精确地指向目标天区。
探秘中国天眼阅读答案
探秘中国天眼阅读答案①被誉为中国“天眼”的世界最大口径射电望远镜即中国建造世界上最大单口径球面射电望远镜筒称FAST。
②射电望远镜,可不是肉眼观测的普通望远镜,它是当今世界上最顶尖级的太空望远镜。
③射电,是比红外线频率更低的电磁波段。
射电望远镜,跟接收卫星信号的天线锅类似,通过锅的反射聚焦,把几平方米到几千平方米的信号聚拢到一点上。
④“宇宙空间混杂各种辐射,遥远的信号像雷声中的蝉鸣,没有超级灵敏的‘耳朵’,根本就分辨不出来。
”中国科学院国家天文台FAST工程首席科学家、总工程师南仁东说。
半个多世纪以来,所有射电望远镜收集的能量尚翻不动一页纸。
要想获得更远、更微弱的射电,“阅读”到宇宙深处的信息,就需要更大口径的射电望远镜。
简言之,就是“锅”越大,星际穿越的距离就越远。
⑤FAST能够把近30个足球场这么大的接收面积里收集的信号,聚集在药片大小的空间里。
与德国波恩100米望远镜相比,FAST灵敏度提高约10倍。
这意味着,远在百亿光年外的射电信号,FAST也有可能“捕捉”到。
⑥打开卫星地图,贵州平塘县的地貌好似布满褶皱的大象皮肤。
再提高分辨率,就能看到大大小小的“漏斗”——“天坑”群。
其中有一个就是科学家寻觅十载为这个最大望远镜找的“家”。
科学家们在当地居民的帮助下,跋山涉水勘察选址。
经过反复筛选,最终在平塘县克度镇找到了“大窝凼”——最适合硕大“天眼”的深深的“眼窝”。
⑦FAST项目馈源支撑系统总工程师孙才红告诉记者,选址“大窝凼”有三方面原因,一是地貌最接近FAST的造型,工程开挖量最小;二是这里的喀斯特地质可以保障雨水向地下渗透,不会在表面淤积而损坏和腐蚀望远镜;三是射电望远镜需要一处“静土”,“大窝凼”附近5千米半径之内没有一个乡镇,无线电环境理想。
⑧总面积达25万平方米的反射面看起来像一口超级“大锅”。
总长度超过1.5千米的钢圈梁,将上万根钢索牢牢固定住。
反射面单元面板固定在上万根钢索上。
⑨“FAST的索网结构可以随着天体的移动自动变化,带动索网上活动的4450个反射面板产生变化,足以观测到任意方向的天体,同时,馈源舱也随索网一同运动,采集反馈信息。
【国家自然科学基金】_馈源舱_基金支持热词逐年推荐_【万方软件创新助手】_20140730
科研热词 结构优化 桁架式梁 曲梁 信赖域法 fast望远镜
推荐指数 1 1 1 1 1
2014年 序号 1 2 3 4
2014年 科研热词 推荐指数 结构基频 1 低通滤波 1 m口径球面射电望远镜 1 500 1
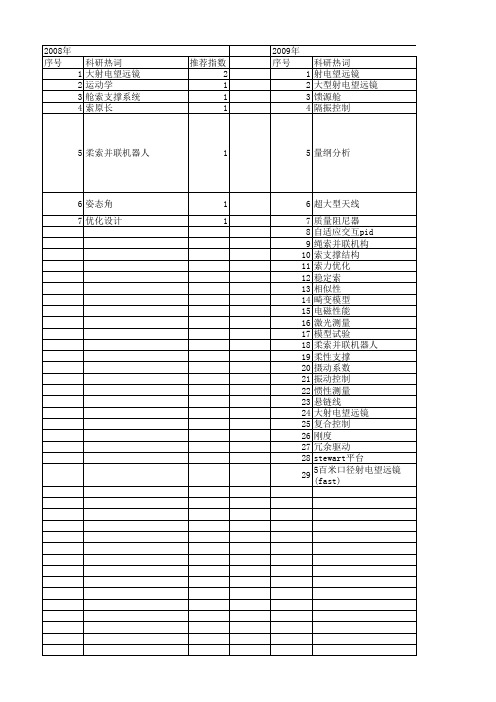
科研热词 射电望远镜 大型射电望远镜 馈源舱 隔振控制 量纲分析 超大型天线 质量阻尼器 自适应交互pid 绳索并联机构 索支撑结构 索力优化 稳定索 相似性 畸变模型 电磁性能 激光测量 模型试验 柔索并联机器人 柔性支撑 摄动系数 振动控制 惯性测量 悬链线 大射电望远镜 复合控制 刚度 冗余驱动 stewart平台 5百米口径射电望远镜(fast)
2012年 序号 1 2 3 4 5 6
科研热词 推荐指数 馈源舱 1 温度分布 1 太阳灶 1 反射面 1 five-hundred-meter aperture spherical 1 radio teles 500米口径球面射电望远镜(fast) 1
2013年 序号 1 2 3 4 5
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14
2011年 科研热词 推荐指数 馈源舱 1 静力学分析 1 索悬链线 1 索并联机构 1 索力优化 1 温度分布 1 柔索牵引并联机构 1 时变重心 1 太阳灶 1 多级混联系统 1 反射面 1 位姿误差 1 fast望远镜 1 500 m口径球面射电望远镜 1
推荐指数 3 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2010年 序号 1 2 3 4 5 6 7 8 9
科研热词 推荐指数 馈源支撑 1 静力学分析优化 1 自适应交互 1 缆线连接机构 1 监督控制 1 射电望远镜 1 宏微并联机器人 1 stewart平台 1 500m口径球面射电望远镜 1
大射电望远镜馈源支撑系统建模与仿真

大射电望远镜馈源支撑系统建模与仿真缪岭,刘玉标(中国科学院力学研究所,北京100190)1引言根据射电天文学发展需要,我国决定利用贵州喀斯特洼地,建设500m 口径球面射电望远镜(Five-hundred-meter Aperture Spherical Telescope ,简称FAST ),建成后FAST 将是世界上最大的单天线射电望远镜,对我国天文学的发展具有重要的意义[1]。
针对如此巨大口径的现实情况,对馈源支撑系统,FAST 采用了一种全新的光机电一体化的创新设计方案[2]。
此设计方案先通过大跨度的悬索对馈源舱进行粗调,然后在馈源舱内采用Stewart 机构进行二次精调,并实时通过激光检测装置检测接收装置的具体位置,与主动反射面配合,反馈给计算机处理进行闭环控制。
由于以往对此工程的机构动力分析一般都建立在有限元的基础上,无法对系统整体进行拖动的实际仿真计算,因此根据上述设计方案,采用多体动力学分析软件MSC .Adams 建立了馈源支撑系统的机械模型及风载模型,并分析了其关键点的响应情况。
2模型的建立按照多体动力学建模方法,对实际机械系统进行抽象,用标准的运动副、驱动约束、力元和外力等要素建立与实际机械系统一致的模型[3]。
悬索系统采用6悬索式悬吊方案。
悬索与馈源舱连接并不交于同一处,而是以相邻两根为一组与馈源舱连接,形成三角形式的连接方案。
悬索模拟采用有限元的方法,将每根悬索分割为多段,以铰接连接,并考虑到悬索的变形,添加了弹簧阻尼元件,使悬索模拟更加符合真实。
馈源舱系统根据分析要求可以分为四部分,分别为三脚架、摆索(阻尼索)、位置器及Stewart 平台,将各部分外形进行简化后,以标准的连接副进行连接。
设S 平台下端动平台中心位置为关键点的位置(此处也为接收器的实际位置)。
设定悬索支点与馈源舱顶部中心水平距离300m ,垂直距离150m ,以主动反射面的底部最低处作为地面,馈源最低点高度约为150m 。
大射电望远镜教案
科普知识教育教案——500米口径大射电望远镜第一课时教学内容:建设过程1993年东京召开的国际无线电科学联盟大会上,包括中国在内的10国天文学家提出建造新一代射电"大望远镜"。
他们期望,在全球电信号环境恶化到不可收拾之前,能多收获一些射电信号。
建造FAST的动机肇始于此。
1994年7月,FAST工程概念提出。
2001年,FAST预研究作为中科院首批"创新工程重大项目"立项,并得到中科院及科技部的支持。
2001年10月,知识创新工程首批重大项目"FAST预研究"总体验收。
2007年7月,国家发展和改革委员会批复500米口径球面射电望远镜国家重大科技基础设施立项建议书,原则同意将FAST项目列入国家高技术产业发展项目计划,FAST工程进入可行性研究阶段。
2008年10月,国家发改委批复500米口径球面射电望远镜国家重大科技基础设施项目可行性研究报告,FAST工程进入初步设计阶段。
2009年2月,500米口径球面射电望远镜国家重大科技基础设施初步概算获得贵州省发改委批复。
2011年3月,FAST工程开工报告获得批复,工程开工项目初步设计和概算获得中国科学院和贵州省人民政府的批复。
工程于2011年3月正式开工建设,预计2016年9月竣工,工期5.5年。
望远镜台址挖掘完工,基地、主动反射面的建造均于2013年内动工。
目前总投资概算为6.67亿元。
高空航拍的施工现场2015年2月4日上午,位于贵州平塘的500米口径球面射电望远镜(FAST)安装了最后一根钢索,索网制造和安装工程结束。
这意味着FAST的支撑框架建设完成,进入了反射面面板2015年11月21日,在贵州黔南安装建设的500米口径球面射电望远镜(FAST)馈源支撑系统进行首次升舱试验,6根钢索拖动馈源舱提升108米,并进行相应的功能性测试。
2015年12月16日,世界最大单口径射电望远镜——500米口径球面射电望远镜(FAST)进行反射面面板安装,边长约11米的三角形面板安装已经完成2059块,完成比例达46%。
大射电望远镜馈源支撑系统索拖动响应分析
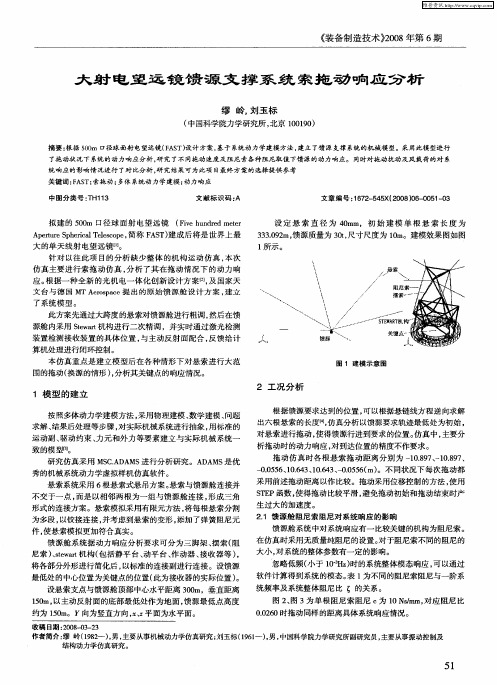
/ L
馈 \、 源 、
图 1 建 模 示 意 图
1模 型 的建 立
按 照多体动力学建模方法 , 采用物理建模 、 数学建模 、 问题
2 工况 分析
根据馈源要求 达到的位置 , 以根据悬链线方程逆 向求解 可 出六根悬索的长度[ 仿真分析以馈源要求 轨迹最低处 为初始 , 4 1 ,
51
维普资讯
了拖 动状 况下系统 的动 力响应 分析 , 究了不同拖 动速度及 阻尼 索各种 阻尼取值 下馈 源的动力响应。同时对拖 动扰动及 风栽荷 的对 系 研 统 响应的影响情 况进行 了对 比分析 , 究结果 可为此项 目最终 方案的选择提供参考 研 关键词 :AS 索拖动 ; F T; 多体 系统动力学建模 ; 动力响应 中图分类号 : 1 3 TH 1 文献标 识码 : A 文章 编号 :6 2 5 5 2 0 0 — 0 1 0 1 7 — 4 X( 0 8)6 0 5 — 3
维普资讯
《 装备制造技术)0 8 2 0 年第 6 期
大 射 电 望 远 镜 馈 源 支 撑 系 统 索 拖 动 响 应 分 析
缪 岭 , 玉标 刘
( 中国科学 院力学研究所 , 北京 10 9 ) 0 10
摘要 : 根据 5 0 口径球 面射 电望远镜( A T) om F S  ̄计方案 , 于系统动力 学建模方 法, 基 建立 了馈 源支撑 系统 的机械模型。采 用此模 型进行
一
研究仿 真采 用 MS .D MS进行分析研究。A A CA A D MS是优 秀的机械 系统动力学虚拟样机仿真软件 。 悬索系统采用 6根悬索式悬 吊方案 。 悬索与馈源舱连接并 不 交于一点 , 而是 以相邻两 根为一组 与馈 源舱连接 , 形成 三角 形式 的连接方案 。悬索模拟采用有 限元方法 , 每根悬索 分割 将 为多段 , 以铰接连接 , 并考虑到悬索 的变形 , 添加 了弹簧 阻尼元
FAST馈源支撑系统位姿分配方法研究
FAST馈源支撑系统位姿分配方法研究邓赛;景奉水;梁自泽;杨国栋;于东俊【摘要】为实现五百米口径球面射电望远镜(Five-hundred meter Aperture Spherical radio Telescope,FAST)馈源支撑系统馈源终端的高精度轨迹跟踪及防止馈源支撑索力超限,研究了馈源支撑系统星形框架和AB轴机构对目标终端位姿的分配算法.首先,根据馈源支撑系统机构特征,综合馈源舱的重心时变及其采用的回照策略,建立了带有馈源舱回照策略的考虑馈源舱重心时变的悬索牵引并联系统力学模型.然后,为解决AB轴机构与星形框架间的运动耦合问题,设计了两种馈源支撑系统位姿分配算法:优先保障六索索力均衡的位姿分配算法和优先保障馈源接收终端定位精度的位姿分配算法.最后,通过仿真对两种算法在馈源终端定位精度和索力分布情况两个方面的性能进行分析.仿真结果表明:前一算法能使六索索力分配均匀,但是引入了最大1.2°的馈源接收终端指向误差,已超出工程指向精度范围.后一算法的六索索力波动较大,但索力没超限或虚牵,能保证馈源接收终端的位姿,此算法满足工程需求.%In order to achieve high-accuracy trajectory tracking at feed end of Five-hundred meter Aperture Spherical radio Telescope (FAST) support system and to prevent the force over-limit of supporting cables,the pose distribution algorithms of target end by the star-frame of feed support system and A-B rotator were studied in the article.Firstly,according to the mechanism characteristic of the feed support system,combining the time-varying barycenter and the back illuminating strategy applied in feed cabin,a mechanical model of cable-driven parallel system which considers the time-varying barycenter of feed cabin and provided with back illuminating strategy was established.Secondly,in order to solve the motioncoupling between the A-B rotator and the star-frame,two pose distribution algorithms of the feed support system were designed:the pose distribution algorithm which gives priority on ensuring the balanced cable force of six-cable and the pose distribution algorithm which gives priority on ensuring the positioning accuracy of the feed receiver.Finally the performance of above two algorithms on positioning accuracy of the feed receiver and the distribution of cable force were analyzed.And the results show that the former algorithm is able to balance the cable force on six-cable,however the error due to introduction of maximum 1.2° of the feed receiver has been beyond the scope of the specified accuracy of the project.The second algorithm makes cable force on six-cable fluctuate significantly,but the force was not over the limit or under virtual pull,which means such algorithm meets engineering requirements because it can ensure the pose of the feed receiver.【期刊名称】《光学精密工程》【年(卷),期】2017(025)002【总页数】10页(P375-384)【关键词】FAST;射电望远镜;位姿分配;重心时变;回照【作者】邓赛;景奉水;梁自泽;杨国栋;于东俊【作者单位】中国科学院自动化研究所复杂系统管理与控制国家重点实验室,北京100190;中国科学院大学,北京100049;中国科学院自动化研究所复杂系统管理与控制国家重点实验室,北京100190;中国科学院大学,北京100049;中国科学院自动化研究所复杂系统管理与控制国家重点实验室,北京100190;中国科学院大学,北京100049;中国科学院自动化研究所复杂系统管理与控制国家重点实验室,北京100190;中国科学院国家天文台,北京100012【正文语种】中文【中图分类】TP394.1;TH691.9500 m口径球面射电望远镜(FAST)是在建的国际上最大、最灵敏的单口射电望远镜[1- 3]。
大射电望远镜精调Stewart平台非线性PID控制
大射电望远镜精调Stewart平台非线性PID控制
王卫东;陈光达;訾斌;陈光静
【期刊名称】《微计算机信息》
【年(卷),期】2007(023)010
【摘要】为了实现大射电望远镜馈源指向跟踪系统精调Stewart平台的高精度轨迹跟踪,针对Stewart平台的系统特点,基于机器人关节控制策略,设计了一种非线性PID的Stewart关节调节器.该非线性PID算法构造了增益参数关于误差信号的非线性拟合函数,算法能够同时保证响应速度快、超调量小以及自适应能力强的系统特性.通过建立平台的数学模型,进行了典型信号输出响应数值仿真.仿真结果验证了关节空间控制策略以及非线性PID控制方法的可行性和有效性.
【总页数】3页(P29-31)
【作者】王卫东;陈光达;訾斌;陈光静
【作者单位】710071,陕西西安,西安电子科技大学机电工程学院;710071,陕西西安,西安电子科技大学机电工程学院;710071,陕西西安,西安电子科技大学机电工程学院;710106,陕西西安,西安通信学院
【正文语种】中文
【中图分类】TP273
【相关文献】
1.大射电望远镜精调Stewart平台工作空间分析 [J], 苏玉鑫;魏强;段宝岩
2.大射电望远镜精调Stewart平台结构刚度分析 [J], 段学超;仇原鹰;段宝岩
3.大射电望远镜精调Stewart平台并联机器人伺服带宽分析 [J], 段学超;仇原鹰;段宝岩
4.大射电望远镜馈源舱系统Stewart平台的技术研究 [J], 李建军;王宇哲;贾彦辉;段艳宾
5.大射电望远镜精调Stewart平台工作空间研究 [J], 段学超;仇原鹰;段宝岩
因版权原因,仅展示原文概要,查看原文内容请购买。
500m口径球面射电望远镜柔性馈源支撑系统仿真
计 算 机 辅 助 工 程
Co utrAie gne rn mp e d d En i e i g
V0 . 0 No 1 12 .
Ma.2 r 011
文 章 编 号 :06—07 (0 1 o .16 o 10 8 1 2 1 ) tO0 一7
c n r lag rt m r e in d a d t e vrua r tt p s b l.Th i e tc o to lo h a e d sg e n h i lp o oy e i ui i t t e k n mais,d n mis a d c nto y a c n o rl a c rc ft e s se u d rt e d su b n e r n l z d.Th i i l t n i cu e h y a c c u a y o h y t m n e h it r a c s a e a ay e e ma n smu ai n ld s t e d n mis o a ay i n c b n c b e s s e i n s se a h o to i a in a ay i n oh r me ha ims a d n lss o a i — a l u p nso y tm nd t e c nr l smult n l ss o t e c n s n o u is n t.Th o me s i lme td b i i l me tmeh d,a d t e lte s i e n e y mu b d e f r ri mp e n e y fnt ee n to e n h at ri mplme td b hi o y s se d n mis y tm y a c me h to i c n r1 Th b te e i n p i z t n c e c n e c iv d b t e c a r nc o to . e etr d sg o tmiai s h me a b a h e e y h o
FAST馈源柔索支撑与高精度动态定位技术及应用
FAST馈源柔索支撑与高精度动态定位技术及应用文/本刊记者 李曼 西安电子科技大学 仇原鹰建造的阿雷西博射电望远镜,口径305米,支撑馈源的悬空背架重达1000吨,也几乎是此类射电望远镜的最大规格。
相比之下,后者更为可行,但若要继续增大口径,不仅已有的施工手段不可行,工程的造价成本更是可望而不及。
孜孜以求,锲而不舍。
为了达到一平方公里的指标,科学家们一直在探寻可能方案。
终于,在1995年,中国天文学家在大窝凼找到了最佳地点,这里不但有世界上最佳的喀斯特地貌,天然形成的超大型碗状500米口径天坑,还拥有着天文观测所需较为洁净的电磁环境。
因此,在中国建造新一代射电望远镜成为可能的首选方案。
同年,第三届国际大射电望远镜工作组会议在贵州召开,此次会议就大射电望远镜建造的创新设计方案展开讨论,段宝岩在会上所作的关于大射电望远镜馈源支撑的光机电一体化创新设计的报告,受到了国内外专家的高度关注,这也是西安电子科技大学与FAST结缘的开始。
如果新一代大射电望远镜阵照搬阿雷西博的设计方案,将会出现三个难题:一是工程造价太高,远远超出国家社会对新一代大射电望远镜的接受程度;二是纯机械跟踪控制系统的精度低;三是工程难度大,当口径达到500米时,悬空背架的重量理论上将近万吨,工程实施难度极大。
段宝岩团队所设计的新方案舍弃了悬空背架,不仅可将馈源支撑结构系统的自重降至约30吨,工程实施和造价变得可行,还克服了阿雷西博方案中结构稳定性方面的不足。
2021年4月1日,被誉为“中国天眼”的500米口径球面射电望远镜(FAST )将正式对全球科学界开放。
在2020年12月初,美国阿雷西博射电望远镜坍塌后,位于中国贵州省平塘县的FAST成为了全球唯一的“大眼睛”。
截至目前,FAST已经累计发现了240余颗脉冲星,不断为人类探索外太空提供线索。
将位于西安电子科技大学图书馆前的50米射电望远镜“馈源支撑与指向跟踪系统模型”等比例放大10倍,就与FAST所应用的馈源驱动系统基本一致。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1)
式中 A 是一个 6 ×6 的方阵 ,其元素和系统的结构
参数与舱的位姿有关 , H 是六根索的水平力列阵 ,
B 是的舱索系统载荷列阵 ,θ为舱的姿态角 ,通过一
定准则可以得到[6] 。
min. f ( X)
=
2 3
(
F( l) max
-
F( l) min
)
+
1 3
(
F( u) max
-
F( u) min
崔传贞 3 , 段宝岩 , 仇原鹰
(西安电子科技大学 电子装备结构教育部重点实验室 ,西安 710071)
摘 要 :基于对馈源舱姿态由 40°增加到 60°的设计要求 ,本文首先将原来的等高塔改成两组不等高塔 ,这对确保 馈源舱 60°姿态角的实现起到了关键作用 。其次 ,对舱索支撑系统进行了优化设计 。设计参数包括索与馈源舱的 连接点坐标 、索横截面积 、塔高等物理量 ,约束函数为平衡方程 、材料强度及边界条件 ,目标是使索张力差最小 。 再者 ,增加平衡重 ,且平衡重离舱顶端距离可在整个工作空间内实时改变 ,这不仅有利于舱姿态角的实现 ,而且可 使索张力差进一步减小 。最后 ,通过大量的数值计算和 L T5 m 实验 ,结果证明了本文所提模型方法和措施的可 行性与有效性 。
国家自然科学基金 (50475171) 资助项目 1 作者简介 :崔传贞 (19822) ,男 ,硕士
( E2mail :czcui @mail . xidian. edu. cn) 段宝岩 (19552) ,男 ,教授 ,博士生导师 1
图 1 点馈源与主动反射面 Fig. 1 Point feed and active main reflector
参考文献( References) :
[ 1 ] DUAN B Y , et al. St udy of t he feed system for a large radio telescope f rom t he viewpoint of mechani2 cal and st ruct ural engineering [ A ] . Proceedings of t he L TW G23 &W2SR T [ C ] . International Academic Publishers , Guizho u , China ,1995 :852102.
满足整个工作空间的要求 。
因此 ,选择的优化设计目标是使上下层索的张
力尽可能均匀 , 用数学方程 (2) 表示 。其中 , 上标 l
和 u 分别表示下层索与上层索 , F 为索张力 , 为水
平张力 H 与竖向张力 V 的矢量和 。之所以第一项
与第二项均未用 1/ 2 ,是考虑到下层索对确保馈源
舱姿态角起到了更大的作用 。
关键词 :大射电望远镜 ;优化设计 ;舱索支撑系统 ;姿态角 中图分类号 : TN823 ;O224 文献标识码 :A
1 引 言
世界上最大的 Arecibo 射电望远镜 ,其口径高 达 305 m ,针对其存在的不足 ,文献 [ 122 ]提出了六 根大跨度悬索支撑线馈源 ,通过合理地调整六根索 的索长 ,可使线馈源在一定空间范围内运动的变革 式创新方案 。文献[ 3 ]提出了主动反射面的思想 , 从而将线馈源代之以点馈源 。为使馈源动态定位 于毫米级 ,文献[ 4 ]提出了如图 1 所示的粗 、精两级 调整的思路 。馈源舱先被六根索调整到分米级的 定位精度 ,舱内稳定平台再进一步调至毫米级的精 度 。建于西安电子科技大学的室内 5 m 和室外 50 m 模型实验 ,验证了所提方案的工程可行性 。可 满足馈源舱 40°姿态角的要求 ,馈源的动态定位精 度可以达到 4 mm 的要求[5 ] 。
表 2 索张力对比
Tab. 2 Co mparisio n of cable tensio n
Fml ax
Fml in
ΔFl
Fmu ax
Fmu in
ΔFu
优化前 511 5 11 4 501 1 441 9 191 2 251 7
优化后 391 1 21 0 371 1 351 8 161 5 191 3
第 25 卷
5 优化模型的应用
为了进一步验证舱索支撑系统优化模型的正 确性 ,在 L T5 米室内模型上进行了实验验证 。经 过优化最后将 L T5 米实验模型改造如图 6 示 ,经 过一系列实验 ,证明优化后的模型可以达到 60°的 姿态角 ,平衡重确实有助于减小索张力差 。
图 6 改造后配有平衡重的 L T5 米模型 Fig. 6 Imp roved L T 5 m model wit h counter2weight
788
计算力学学报
第 25 卷
图 2 设计变量示意图 Fig. 2 Sketch of design variables
当舱处于空间一点时 ,可以得到舱索系统的非 P : 寻求设计变量 : X = ( x1 , x2 , …, xn) T
线性静力平衡方程组[6 ] :
A (θ) H = B (θ)
具体计算步骤 :当γ = 60°时 ,以 x11 和 x12 为设 计变量 ,其他参数见表 1 所给的优化结果 , 优化目 标不变 ,这样可求得平衡重的质量 x131 为 21 97 t 和 最大的 x132 为 101 03 m ;然后让γ分别取为 50°,40°, 30°,20°,10°及 0°,固定平衡重质量为 x131 ,只优化距 离 x12 ,其上限为 x132 。
第25卷第6期 2008 年 12 月
计 算 力 学 学 报 Chinese Journal of Computational Mechanics
Vol . 2 5 , No . 6 December 2008
文章编号 :100724708 (2008) 0620787204
新一代大射电望远镜馈源舱索支撑系统的优化设计
经过优化可得到图 5 所示的结果 ,其给出了施 加平衡重前后最大张力差的变化情况 ,下层索最大 张力差由原来的 371 1 t 降至 321 8 t 。
图 5 索张力差随姿态角的变化情况 Fig. 5 Variation of cable tension difference
790
计算力学学报
6 结 论
(1) 本文提出的不等高塔的方案有利于大姿 态角的实现 。
(2) 将舱索支撑系统描述为一非线性规划问 题 ,从而可系统考虑多变量取值 ,以获取索张力尽 可能均匀的优化设计 。
(3) 在馈源舱顶端加平衡重 ,且位置随舱的姿 态角可实时改变 ,有利于进一步减小索张力差 ,节 省能源 。
(4) 数值模拟结果和 L T5 米实验证明了上述 方案的有效性 、正确性和工程实现的可行性 。
在实际工程中 ,可通过在上下层索塔处分别加 大小等于最小索张力的配重如图 3 所示 。这样对伺 服电机的最大功率要求就不是索的最大张力 ,而变 成了索的最大张力差 。为了节约能源 , 减小索的最 大张力差是十分必要的 ,此外 ,减小索张力差 ,也有
xi ≤ x i ≤ xi ( i = 1 , 2 , …, n)
51 32 - 11 50
01 71 61 89 261 8 2981 5 2601 8 21 65 51 3 31 2
下限 5
- 11 50 01 5 3 0 235 235 0 1 1
上限 10 0 3 10 60 300 288 21 70 10 10
单位 m m m m deg m m m cm2 cm2
统的优化设计研究 。
2 优化问题的数学描述
经过计算机数值模拟和实验验证 ,原方案无法 达到 60°姿态角的要求 。通过对其分析 ,提出了将 原来的六个等高塔变成两组不等高塔的方案 。三 根下层索塔设计成一组高塔 ,三根上层索塔设计成 一组低塔 ,如图 2 (a) 所示 。从力学上看 ,显然有利 于舱的姿态角实现 。通过数值模拟可以得到 ,当下 上层索塔取几组合适的值时 ,都能满足 60°姿态角 要求 ,同时也发现如果提高舱的重心 ,也有助于舱 的姿态角实现 。因此应对舱索支撑系统参数进行 综合考虑 ,进行系统优化 。
表 1 变量初值与优化结果
Tab. 1 Original value and optimal result of variables
变量 X1 X2 X3 X4 X5 X6 X7 X8 X9 X 10
原始值 51 0 0 01 5 41 5 61 0 280 280 11 0 51 0 51 0
优化结果
馈源舱自重为 30 t , 索材料为钢丝绳 , 容许应 力为 155 kg/ mm2 ,为防止虚牵并使索保持一定张 力 ,特取 H = 20 kg ,V = 1 t , 设计变量总数 n 取 10 。
图 4 描述了优化后舱走γ = 60°对应的极限圆 时各索张力 F与索长 L 的变化情况 ,整个过程中索 张力的变化是平滑的 , 伺服驱动是可以保证实现 的 。表 2 给出了优化前后上下层索最大 、最小张力 的对比 ,单位为 t ,可以看到优化后下层索张力差减 小了 251 9 % ,上层索张力差减小了 241 9 % ,优化效 果还是很明显的 。
(7)
式 (3) 要求舱在跟踪天体的过程中 ,需满足式 (1) 的
静平衡方程 , 式 (4) 和式 (5) 要求索不出现虚牵问
题[7] ,以保证舱的姿态角 , 式 (6) 表示索应满足其材
料强度要求 ,式 (7) 表示所有变量均有上下限约束。
问题 P 是针对整个工作空间而言的 ,由于γ =
60°的工作空间最难实现 , 同时也是最大索张力差
出现的位置 ,只要γ = 60°的工作空间达到了 ,其他
工作空间肯定也能达到 。故本文的具体做法是 , 将
γ = 60°的极限圆等划分为 360 个点 ,于是在每个点