正反转的PLC控制实现
PLC控制步进电机正实现正反转速度控制定位

PLC控制步进电机正实现正反转速度控制定位 1.步进电机正反转如何实现2.如何控制步进电机速度(即,如何计算脉冲频率):实际步进电机控制很简单,应用都是傻瓜了,厂家做好步进电机的驱动器,步进电机如何工作由驱动器来控制,我们不需要对步进电机做深入的了解,只要知道步进电机驱动器的应用方法即可。
当然简单的步进电机工作特性,还是必须知道的,下面我会介绍!细分的作用:两相步进电机,基本步距角1.8度,即:200个脉冲电机转一圈,称之为整步。
可以在步进电机的驱动器上设定细分数,其作用是:设置为2细分(也称为半步)时,则步距角为0.9度,400个脉冲转一圈。
设置为4细分时,则步距角为0.45度,800个脉冲转一圈。
设置为8细分时,则步距角为0.225度,1600个脉冲转一圈。
细分数越高,上位机发一个脉冲走的长度越小,精度越高!这个很好理解,一个脉冲走10毫米,10%误差时,一个脉冲误差1毫米,一个脉冲走1毫米,同样是10%误差时,一个脉冲误差0.1毫米。
当然,我们不可能把细分数设的很大,达到每个脉冲行走的长度特别小的目的。
您记住两相步进电机200个脉冲转一圈就行了!细分越大,步进电机转一圈的脉冲数越大!如果想让步进机以每分钟600转的速度,行走400毫米,我们如何计算上位机需要发出的脉冲数及脉冲频率?如何控制步进电机速度(即,如何计算脉冲频率):假定设置为四细分数,电机转一圈所需要的脉冲数即为800个,要实现步进电机600转/分的转速,上位机应该发送的脉冲频率计算方法:频率的概念是一秒钟的时间发送的脉冲个数所以,先计算步进电机每秒钟的转数600/60=10转/秒再计算10转/秒需要的脉冲数10 X 800 = 8000个即脉冲频率为 8000 ,也就是8K结论,为了实现步进电机600转/分的转速,上位机应该保持8K的脉冲输出频率现在您明白了吧?为了计算脉冲频率必须知道的两个前提条件是:1、知道步进电机转一圈需要的脉冲数;2、知道步进电机的转速,转速单位是:转/如何计算步进电机所需要的脉冲数:假定设置为四细分数,电机转一圈所需要的脉冲数即为800个,要实现步进电机行走400毫米的距离,上位机应该发送的脉冲个数计算方法:如果步进电机输出轴与丝杠(螺距:10mm )直连,或是通过皮带轮传动,轮周长10mm. 即,步进电机转一圈,机械的行走长度为10mm。
任务三 三相异步电动机正反转循环运行的PLC控制

(二)设备与器材
表1-22 设备与器材
序号
名称
符号
型号规格
数量 备注
1
常用电工工具
十字起、一字起、尖嘴钳、剥线钳 等
1
2
计算机(安装GX Works3编程 软件)
3
三菱FX5U可编程控制器
PLC
FX5U-32MR/ES
4
三相异步电动机正反转循环运 行控制面板
5
三相异步电动机
6
以太网通信电缆
M
WDJ26,PN=40W,UN=380V, IN=0.2A,nN=1430r/min,f=50Hz
2)学会用三菱FX5U PLC的顺控程序指令编辑三相异步电动机正反转循 环运行控制的程序。
3)会绘制三相异步电动机正反转循环运行控制的I/O接线图。 4)掌握FX5U PLC I/O接线方法。 5)熟练掌握使用三菱GX Works3编程软件编辑梯形图程序,并写入 PLC进行调试运行。
11
项目一 任务三 三相异步电动机正反转运行运行的PLC控制
MPS
栈存储器的第一层, 之前存储的数据依次
下移一层
读取堆栈第一层的 MRD 数据且保存,堆栈内
的数据不移动
读取堆栈存储器第
MPP
一层的数据,同时该 数据消失,栈内的数
据依次上移一层
梯形图表示
FBD/LD表示
ST表示
目标元件
ENO:=MPS(EN);
ENO:=MRD(EN);
无
ENO:=MPP(EN);
对于FX5U PLC默认情况下,16位计数器的个数为256个,对应编号为C0 ~C255;32位超长计数器个数为64个,对应编号为LC0~LC63。
电动机正、反转控制电路的PLC程序设计举例
电动机知识电动机正、反转控制电路的PLC程序设计举例在例一的基础上,如果希望实现三相异步电动机的可逆运行,只需增加一个反转控制按钮和一个反转控制的接触器KM2即可。
其相对应的元件安排如下:在梯形图设计上可以考虑选两套起—保—停电路,一个用于正转,一个用于反转,考虑正反两个接触器不能同时接通,在两个接触器的驱动支路中分别串入对方的常闭触点来达到“互锁”的目的。
其相应的控制梯形图如图1所示:程序清单:图1 电动机正、反转控制电路的PLC梯形图程序——双重输出线圈〃电动机断相的一种自动保护方法〃济南钢铁晃电解决方案----FS/E防晃电系〃用PLC改进鼠笼式异步电动机的控制方案〃电气设计中低压交流接触器选用〃电气设备维修方法与实践〃施耐德LC1交流接触器选型*参数〃通过变频器操作面板控制电动机的启动、〃接触器联锁的正反转控制线路原理分析〃双华ZNB-S电动机正反转电路图_电路图〃电动机正反转实物接线图_电路图〃多台电机并联同步运行方案〃用接触器进行电机正反转控制_电路图〃电动机正反转控制电路图_电路图〃交流接触器接线图_电路图〃按钮接触器复合联锁的电动机正反转控制〃液压泵驱动电机的故障〃达尔文系统在汽车行业的应用----SmartWDomain: dnf辅助More:d2gs2f 〃什么是自锁电路.它的用途和原理_电路〃交流接触器接线图〃中低压交流接触器的选用〃交流接触器的使用类别及注意事项〃用三个接触器实现星三角启动原理图〃仿真三相异步电动机正反转运行状态的电〃ABBIORC型拍合式接触器在首钢二炼钢350〃晃电与自起动的区别〃印刷设备中交流接触器的选用〃台安SG2智能控制单元在自动扶梯上的应收录时间:1380248141 作者:匿名随着起重机的不断发展,传统控制技术难以满足起重机越来越高的调速和控制要求。
在电子技术飞速发展的今天,起重机与电子技术的结合越来越紧密,如采用PLC取代继电器进行逻辑控制,交流变频调速装置取代传统的电动机转子串电阻的调速方式等。
电动机正反转PLC控制(1)

2L 0.4 0.5 0.6
3L 0.7 1.0 1.1
N L1
1M 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 2M 1.0 1.1 1.2 1.3 1.4 1.5 M L+
+-
DC24V
四、PLC接线 控制接线
KM1 KM2
AC220V G NL
1L 0.0 0.1 0.2 0.3
3.3 电动机正反转PLC控制
主讲:万三国
第七周
内容提要
1.电动机正反转控制线路 2.硬件接线 3.程序编写 4.控制逻辑仿真
一、电动机正反转控制线路
L1 L2 L3 N
QF
KM1
FR
M 3~
FU1 FR
KM2
HL1
SB1 SB2
KM1 KM2
KM1 SB3
HL2 KM2 KM1
HL3 KM2
HL4 KM1 KM2
• 一旦RLO为“1”,则操作数的状态 置“0”,即使RLO又变为“0”, 输出仍保持为“0”;若RLO为 “0”,则操作数的信号状态保持 不变。
位操作类指令
网络1 LD I0.0 S …Q…0.0, 1
网络2 LD I0.1 R Q0.0, 1
使用注意事项
• 1、S/R指令通常成对使用,也可以单独使用或与指令配合使用,对同一元件, 可以多次使用S/R指令;
控制逻辑仿真
首先导出程序,从菜单命令“文件->导出…”导出后缀为“awl”的文件“电 动机正反转控制.awl”。
程序导出后,打开S7-200仿真程序装入程序,然后开始进行仿真。
导出:导出的程序供给仿真程序或PLC使用。 保存:保存的程序只能给编程软件使用。
用PLC实现电动机正反转

一、实验目的
用PLC控制电动机正反转和Y/ 启动。
二、实验设备
T-90系列学习机主机箱(主机型号为FP0-C32T)。 2. UNIT-1电机控制实验板。 3. 连接导线一套。
三、实验内容
1. 控制要求:
按下正转启动按钮SB1,电动机正转运行,且KM1,KMY 接通。2s后KMY断开,KM △ 接通,即完成正转启动。
按下停止按钮SB2,电动机停止运行。 按下反转启动按钮SB3,电动机反转运行,且KM2,KMY 接通。2s后KMY断开,KM 接通,即完成反转启动。
2.I/O分配:
输入 输出
X0-----SB1
X1-----SB2 X2-----SB3
Y0-----KM1
Y1-----KM2 Y2-----KMY
Y3-----KM 3.编写、调试并运行程序。
1、异步电动机直接启动控制接线图:
A B C C' KM SB KM B'
QS FU
控 制 电 路
动作过程 主 电 路
M 3~ 按下按钮(SB) 线圈(KM)通电
触头(KM)闭合 按钮松开
电机转动;
线圈(KM)断电
触头(KM)打开
电机停转。
2、电机的正反转控制— 加互锁
用PLC实现交通信号灯控制
一、实验目的
用PLC构成交通灯控制系统。
二、实验设备
T-90系列学习机主机箱(主机型号为FP0-C32T)。 2. UNIT-3 交通灯控制实验板。 3. 连接导线一套。
三、实验内容
1.控制要求:
开关合上后,东西绿灯亮4s后闪2s灭;黄灯亮2s灭;
红灯亮8s;绿灯亮循环,对应东西绿黄灯亮时南北
正反转的PLC控制实现详解

A I0.0 AN I0.0
I0.0
• AN(And Not)
• O (Or)
O
I0.0
起动保持停止电路(起保停电路)
I0.0 I0.1 Q0.0
( )
Q0.0
LD I0.0 O Q0.0 AN I0.1 = Q0.0
软件
~~
QF ቤተ መጻሕፍቲ ባይዱU
任务3:电动机正反转控制
FR
SB3
KM1 FR
SB1
KM1
KM2 KM1
KM2
SB2
KM1 KM2
M 3~
KM2
任务3实施:电动机正反转PLC控制实现
正转启动 SB1 I0.0 SB2 I0.1 SB3 I0.2 Q0.0 KM2
KM1 KM2
FR
反转启动
停止
Q0.1
KM1
负载电源
M M
电动机正反转梯形图
I0.0 I0.2 Q0.1 Q0.0
正转
FR KM
M 3 3~ ~
任务2实施:电动机启-保-停PLC控制实现
SB1 I0.0 I0.1 SB2 M
Q0.0
~
KM
I/O分配:
M
I0.0:启动
I0.1:停车
Q0.0:KM
PLC外部接线图
起动保持停止电路(起保停电路)
I0.0 I0.1 Q0.0
( )
Q0.0
PLC指令学习
I0.0
• A(And)
任务1实施:电动机点动PLC控制实现
输入 电路
梯形 图程 序
输出 电路
PLC指令学习
• LD(Load)
I0.0
LD I0.0
项目3PLC实现电动机正反转控制PPT课件

系统调试
硬件连接检查
确保PLC、电动机、传 感器等硬件设备正确连 接,无短路或断路现象。
软件编程调试
检查PLC控制程序是否 符合设计要求,对程序 进行调试,修正错误和
优化逻辑。
安全保护措施
在调试过程中,确保安 全保护措施有效,如急
停按钮、安全门等。
模拟运行测试
在调试过程中,通过模 拟运行测试来验证电动 机正反转控制功能的正
电动机控制的需求。
在项目中,我们采用了可编 程逻辑控制器(PLC)技术, 通过编程实现对电动机的正 反转控制,提高了控制的稳
定性和可靠性。
在项目实施过程中,团队成 员密切协作,共同完成了项 目的各项任务,提高了团队
的凝聚力和协作能力。
项目成果与经验教训
成果展示
经验总结
教训反思
经过测试和实际应用,基于3PLC的电 动机正反转控制系统运行稳定,控制 效果良好,提高了生产效率。
PLC工作原理
总结词
核心流程与机制
详细描述
PLC采用扫描工作模式,通过循环执行输入处理、程序执行和输出处理三个阶段 ,实现对外部设备的控制。在程序执行阶段,PLC按照一定的扫描速度逐条执行 存储器中的用户程序,根据输入状态和内部逻辑运算结果输出相应的状态。
PLC编程语言
总结词
编程方式与工具
详细描述
推动PLC技术的应用
项目的实施将推动PLC技术在电动机控制系统中的应用和发展,促 进相关技术的进步。
02
PLC基础知识
PLC定义与特点
总结词
核心功能与优势
详细描述
PLC,即可编程逻辑控制器,是一种专门为工业环境设计的数字电子系统。它具 有高可靠性、高灵活性、易扩展性等特点,能够实现复杂的逻辑控制、顺序控 制和过程控制等功能。
PLC电机正反转实验-欧姆龙-自动化
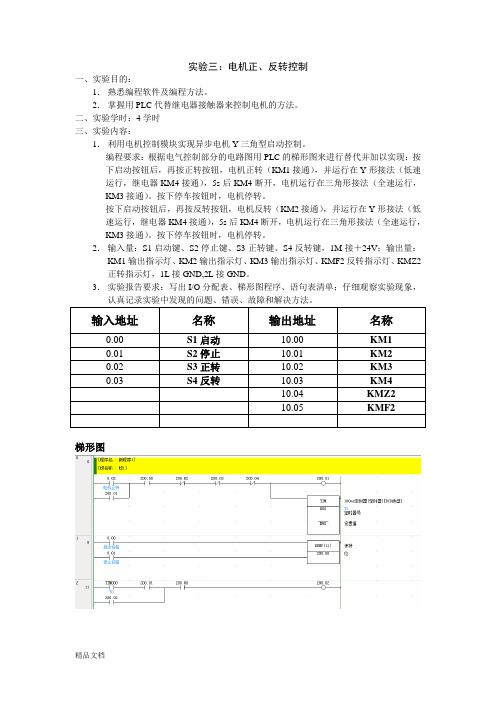
实验三:电机正、反转控制
一、实验目的:
1.熟悉编程软件及编程方法。
2.掌握用PLC代替继电器接触器来控制电机的方法。
二、实验学时:4学时
三、实验内容:
1.利用电机控制模块实现异步电机Y-三角型启动控制。
编程要求:根据电气控制部分的电路图用PLC的梯形图来进行替代并加以实现:按下启动按钮后,再按正转按钮,电机正转(KM1接通),并运行在Y形接法(低速运行,继电器KM4接通),5s后KM4断开,电机运行在三角形接法(全速运行,KM3接通)。
按下停车按钮时,电机停转。
按下启动按钮后,再按反转按钮,电机反转(KM2接通),并运行在Y形接法(低速运行,继电器KM4接通),5s后KM4断开,电机运行在三角形接法(全速运行,KM3接通)。
按下停车按钮时,电机停转。
2.输入量:S1启动键、S2停止键、S3正转键、S4反转键,1M接+24V;输出量:KM1输出指示灯、KM2输出指示灯、KM3输出指示灯、KMF2反转指示灯、KMZ2
正转指示灯,1L接GND,2L接GND。
3.实验报告要求:写出I/O分配表、梯形图程序、语句表清单;仔细观察实验现象,认真记录实验中发现的问题、错误、故障和解决方法。
输入地址名称输出地址名称
0.00 S1启动10.00 KM1
0.01 S2停止10.01 KM2
0.02 S3正转10.02 KM3
0.03 S4反转10.03 KM4
10.04 KMZ2
10.05 KMF2
梯形图
语句表。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
——电动机正反转的PLC控制实现
单位:河北师大职业技术学院 教师:
PLC实现对电动机的正反转控制
电动机正反转的PLC控制实现
任务分解:
任务1:电动机点动控制 任务2:电动机启-保-停控制 任务3:电动机正反转控制
任务1:电动机点动控制
~~
Q FU FR KM
KM
FR
SB1
M 3 ~ 3~
I0.0
A I0.0 AN I0.0
I0.0
• AN(And Not)
• O (Or)
O
I0.0
起动保持停止电路(起保停电路)
I0.0 I0.1 Q0.0
( )
Q0.0
LD I0.0 O Q0.0 AN I0.1 = Q0.0
软件
~~
QF FU
任务3:电动机正反转控制
FR
SB3
KM1 FR
SB1
Q0.0
I0.1
I0.2
Q0.0
Q0.1
反转
Q0.1
电动机正反转语句表
I0.0
Q0.0
I0.2
Q0.1
Q0.0
LD I0.0 O Q0.0 AN I0.2 AN Q0.1 = Q0.0 LD I0.1 O Q0.1 AN I0.2 AN Q0.0 = Q0.1
软件
I0.1 Q0.1
I0.2
Q0.0
FR KM
M 3 3~ ~
任务2实施:电动机启-保-停PLC控制实现
SB1 I0.0 I0.1 SB2 M
Q0.0
~
KM
I/O分配:
M
I0.0:启动
I0.1:停车
Q0.0:KM
PLC外部接线图
起动保持停止电路(起保停电路)
I0.0 I0.1 Q0.0
( )
Q0.0
PLC指令学习
I0.0
• A(And)
任务1实施:电动机点动PLC控制实现
输入 电路
梯形 图程 序
输出 电路
PLC指令学习
• LD(Load)
I0.0
LD I0.0
I0.0
• LDN(Load Not)
Q0.0
LDN I0.0
=
=
Q0.0
PLC指令实现点动控制
LD =
I0.0 Q0.0
任务2:电动机启-保-停控制
~~
Q FU SB2 SB1 KM FR KM
Q0.1
小结
• 1、点动电路和PLC程序 • 2、启保停电路和PLC程序 • 3、正反转电路和PLC程序
作业:预习定时器和电机的星三角 延时降压启动
KM1
KM2 KM1
KM2
SB2
KM1 KM2
M 3~
KM2
任务3实施:电动机正反转PLC控制实现
正转启动 SB1 I0.0 SB2 I0.1 SB3 I0.2 Q0.0 KM2
KM1 KM2
FR
反转启动
停止
Q0.1
KM1
负载电源
M M
电动机正反转梯形图
I0.