简易转台控制系统设计
三工位旋转工作台的控制设计
三工位旋转工作台的控制设计需要考虑以下几个方面:
1. 控制方式:可以采用手动控制或自动控制。
手动控制需要操作员手动控制旋转工作台的转动方向和速度,而自动控制则需要通过程序控制旋转工作台的转动。
2. 控制器选择:可以选择PLC、单片机或其他控制器。
PLC控制器可以实现较为复杂的控制功能,而单片机则适合于简单的控制任务。
3. 传感器选择:需要选择合适的传感器来检测旋转工作台的位置和速度。
常用的传感器包括编码器、光电开关等。
4. 控制算法:需要设计合适的控制算法来实现旋转工作台的控制。
常用的控制算法包括PID控制、模糊控制等。
5. 电机选择:需要选择合适的电机来驱动旋转工作台。
常用的电机包括步进电机、直流电机等。
6. 电路设计:需要设计合适的电路来实现控制器、传感器和电机之间的连接和控制。
综上所述,三工位旋转工作台的控制设计需要综合考虑以上几个方面,根据实际需求选择合适的控制方式、控制器、传感器、控制算法、电机和电路设计。
两轴转台控制系统设计
两轴转台控制系统设计
两轴转台控制系统设计
转台系统是以控制论、相似原理、系统和信息技术为基础,利用计算机和专用物理设备等辅助工具,为飞行器实验提供平台的专用设备.不同的转台系统对控制精度有着不同的要求,本文在给定技术指标的要求下,利用PMAC运动控制器,为转台设计了一套PID控制方案.通过对转台进行建模、仿真,验证了所设计方案的可行性.最后,搭建电路并调试系统,实现了预期的要求.
作者:李亮孙力闫杰 Li Liang Sun Li Yan Jie 作者单位:西北工业大学航天学院,西安,710072 刊名:电子测量技术 ISTIC 英文刊名:ELECTRONIC MEASUREMENT TECHNOLOGY 年,卷(期):2009 32(2) 分类号:V448.25+3 关键词:转台系统 PMAC运动控制器 PID控制。
转台控制系统设计
电磁骚扰是指任何可能引起装置、设备或系统性能降低或者对生命或无生命物质产生损害作用的电磁现象。
它可以通过辐射和传导两种方式转播,而辐射骚扰的测试必须要考虑可重复性、经济性、准确性、抗干扰性和快速定位。
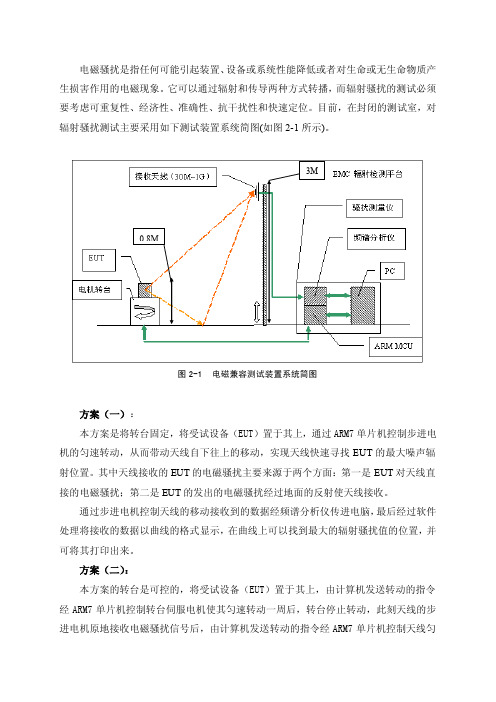
目前,在封闭的测试室,对辐射骚扰测试主要采用如下测试装置系统简图(如图2-1所示)。
3M0.8M图2-1电磁兼容测试装置系统简图方案(一):本方案是将转台固定,将受试设备(EUT)置于其上,通过ARM7单片机控制步进电机的匀速转动,从而带动天线自下往上的移动,实现天线快速寻找EUT的最大噪声辐射位置。
其中天线接收的EUT的电磁骚扰主要来源于两个方面:第一是EUT对天线直接的电磁骚扰;第二是EUT的发出的电磁骚扰经过地面的反射使天线接收。
通过步进电机控制天线的移动接收到的数据经频谱分析仪传进电脑,最后经过软件处理将接收的数据以曲线的格式显示,在曲线上可以找到最大的辐射骚扰值的位置,并可将其打印出来。
方案(二):本方案的转台是可控的,将受试设备(EUT)置于其上,由计算机发送转动的指令经ARM7单片机控制转台伺服电机使其匀速转动一周后,转台停止转动,此刻天线的步进电机原地接收电磁骚扰信号后,由计算机发送转动的指令经ARM7单片机控制天线匀速向上移动,同时天线将接收到得信号经频谱分析仪处理后所得的数据,经过串口发给计算机,由计算机里测试软件以一定的算法、最快的速度处理数据,以此找到设备在该点的最大电磁骚扰值。
等天线向上移动1M后,由计算机的测试软件发出指令,使天线停止,同时让再次匀速转动一周,在转动中有天线接收EUT发出的电磁骚扰信号,后面的步骤如上所述。
当计算机读完四次数据时天线移动到最顶端。
测试完毕,由测试软件发出指令使天线回到原始位置,以便下次的测试。
其中天线接收的EUT的电磁骚扰主要来源于两个方面:第一是EUT对天线直接的电磁骚扰;第二是EUT的发出的电磁骚扰经过地面的反射使天线接收。
通过步进电机控制天线的移动接收到的数据经频谱分析仪传进电脑,最后经过软件处理将接收的数据以曲线的格式显示,在曲线上可以找到最大的辐射骚扰值的位置,并可将其打印出来。
单轴转台伺服控制系统电路设计

关 键 词 : 轴 转 台 :永磁 同步 电机 ; 能 功 率模 块 ; R K 0 单 智 IMC 2 3
中 图分 类 号 : P 9 ; M3 1 T 3 1T 4 文献标识码 : A
3 硬 件 设 计
图 1为 基 于 I M K 0 R C 2 3的 永 磁 同 步 电 机 伺 服 控 制 系 统 结构原理图 。
整 个 系 统 由主 电路 、 制 电路 和 辅 助 电路 组 成 。其 中 主 控
F g S r c u e o h e v o t ls se f rPMS i .1 tu t r ft e s r o c n r y t m o o M
算 、 lr 换 等 闭 环 控 制 所 需 的 所 有 功 能 单 元 . 有 功 能 全 C ak变 所
调节器参数 、 电流 反 馈 范 围 、W M 载 频 等 ) P 和监 视 系统 状 态 。 因 此 , 课 题 将 I MC 2 3作 为 主 控 芯 片 进 行 永 磁 同 步 本 R K0 电机伺服控制系统的硬件和软件设计 。
电路 由 电 源 模 块 、功 率 驱 动 电 路 和 永 磁 同 步 电 机 等 组 成 ; 控 制 电 路 由 T S 2 F 8 2 D P和 I M K 0 M 3 0 2 1 S R C 2 3以及 外 围 电 路 联
三 相 驱 动 电源 输 入 端 V F V F V B与 驱 动 电 源 G D U B、 V B、 WF N
a c u t r n RMC 0 s s r oc n r l ri p o o e h sp p r T e t e h r w r n ot a e a e d sg e a e s tao dI a a K2 3 a e v o t l r p s d i ti a e . h n, h ad a e a d s f r r e in d b s d oe s n w o eP 2 8 7 I M n RMC 0 . nt S 1 6 h P a dI K2 3
转台计算机伺服控制系统设计
转台计算机伺服控制系统设计飞行仿真转台为高精度的复杂控制系统,是地面半实物仿真的关键设备,用以模拟飞行器在空中的各种动作和姿态,包括偏航、滚转和俯仰,实际上是一种电信号到机械运动的转换设备。
把高精度传感器如陀螺仪、导引头等安装于转台之上,将飞行器在空中的各种姿态的电信号转化为转台的三轴机械转动,以使陀螺仪、导引头等敏感飞机的姿态角运动。
“高频响、超低速、宽调速、高精度”成为仿真转台的主要性能指标和发展方向。
其中,“高频响”反映转台跟踪高频信号的能力强;“超低速”反映系统的低速平稳性好;“宽调速”可提供很宽的调速范围;“高精度”指系统跟踪指令信号的准确程度高。
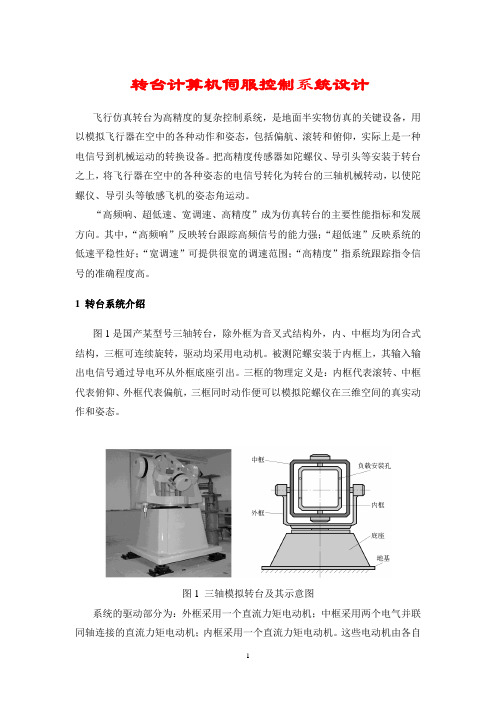
1 转台系统介绍图1是国产某型号三轴转台,除外框为音叉式结构外,内、中框均为闭合式结构,三框可连续旋转,驱动均采用电动机。
被测陀螺安装于内框上,其输入输出电信号通过导电环从外框底座引出。
三框的物理定义是:内框代表滚转、中框代表俯仰、外框代表偏航,三框同时动作便可以模拟陀螺仪在三维空间的真实动作和姿态。
图1 三轴模拟转台及其示意图系统的驱动部分为:外框采用一个直流力矩电动机;中框采用两个电气并联同轴连接的直流力矩电动机;内框采用一个直流力矩电动机。
这些电动机由各自的脉冲调宽放大器(PWM)提供可控直流电源。
三框各有一个测速发电机和一个感应同步器,用以实时检测框架的旋转角速度和角位置。
不同用途的测试转台的对性能指标的要求也不同。
一般转台的主要技术指标包含:静态精度(达到千分之几度)、角速度范围(从千分之几度/秒到几百度/秒)、频率响应要求较宽,并具有一定的负载能力要求,且三个框架都具有最大速率的限制。
2 三轴测试转台的总体控制结构转台三个框架的控制是相互独立的,因此转台的控制系统可以采用如图2所示的原理方案。
该系统为上下位机结构的计算机控制系统。
以一台工控机作上位机,实现对伺服系统的监控、检测和管理。
上位机提供操作者的人机界面,实现对整个转台系统的在线检测、安全保护、性能检测和系统的运动管理以及数据处理。
小型数控钻床旋转平移工作台控制系统设计

小型数控钻床旋转平移工作台控制系统设计毕业设计(论文)题目:小型数控钻床旋转平移工作台操纵系统设计何强届别:2020届院别:机械工程学院专业:机械电子工程指导教师:余晓峰职称:副教授完成时刻:2020/4/25摘要在机械加工行业中,旋转平移钻床工作台使用量专门大,为了提高加工效率,保证加工精度,必须对钻床工作台进行数控化改进。
本文对传统钻床工作台存在的不能专门好的在圆周方向上钻孔问题,设计了一款立式钻床旋转工作台。
本文确定数控钻床工作台整体结构设计方案,对机械部分对圆周方向上旋转,x、y方向上平移做了重点设计。
对操纵系统部分,本文阐述了用单片机操纵交流伺服电机以实现钻床工作台旋转、平移过程。
阐述了整个系统的操纵原理。
本课题所设计的工作台,其加工过程是将所需加工孔的数据通过输入设备输入到操纵系统,然后系统依照工件上所需加工孔的坐标,是工作台运动到孔的位置,实现对工件的全自动钻孔,同时系统在加工过程中实时显示加工数据。
关键词:传动系统;操纵系统;步进电动机AbstractIn the mechanical processing industries,rotary drilling machine working table used in large quantities,in order to improve the processing efficiency,ensuring the processing precision,to table of the drilling machine NC improvement.Based on traditional drilling machine working table problem,design a vertical drilling machine rotary table.Based on the domestic and intermational current situation and development trend undertook an anakysis,in determining the overall scheme,elaborated with SCM control ACservo motor to achieve drilling machine worktable rotation,translation process.The first running process of the CNC drilling designed by the subject,is to input the processing data about the hole into the control system by the entering equipment,then find the location of location of the hole by moving the table according to coordinate of the hole,and the procedding data of the system displayed in real-time.Key words: drive system;control system;stepping motor目录1绪论 ....................................................... (5)1.1 现状 (5)1.2 进展前景 (5)2.1工作原理及总体框图 (6)2.2流程图 (6)3 旋转工作台传动系统设计 (8)3.1旋转部分设计 (8)3.1.1工作台箱体设计 (8)3.1.2传动比及参数确定 (9)3.1.3步进电机的选择 (10)3.1.4 轴的设计 (12)3.1.5轴承的选择 (14)3.1.6联轴器的选择 (14)3.2工作台X-Y机械部分设计 (15)3.2.1 确定工作台的尺寸极其重量 (15)3.2.2滚珠丝杠参数运算与选型 (16)3.2.3 滚动导程参数运算与选型 (17)3.2.4步进电机参数运算与选型 (18)3.2.5 支撑座参数设计 (19)3.2.6 联轴器的选择 (20)4 工作台操纵系统设计 (21)4.1操纵系统元器件的选择 (21)4.1.1 单片机的选择 (21)4.1.2最小系统设计 (21)4.1.3I/O接口芯片选择 (22)4.1.4译码器的选择 (23)4.1.5 地址分配 (24)4.2操纵系统电路的设计 (25)4.2.1主控电路设计 (25)4.2.2 I/O接口电路设计 (25)4.3辅助电力路的设计 (26)4.3.1键盘显示接口电路 (26)4.3.2步进电机操纵电路 (27)4.3.3脉冲分配 (28)4.3.4 驱动电路 (29)4.3.5光隔离电路 (29)4.3.6功率放大器和时钟电路 (30)4.3.7复位电路 (30)4.3.8越界报警电路 (31)4.3.9掉电爱护电路 (32)5致谢--------------------------------------------------------------------33 6参考文献----------------------------------------------------------------34 7附录---------------------------------------------------------------------------------------------------------------------361绪论1.1 现状中国分度回转工作台产业领域的进展存在专门多问题,如在产业结构规划布局上不合理,劳动力密集型产品在生产上占据了要紧部分;技术类密集型产品在生产上只占据了专门少的一部分,同时与西方发达工业国家相比有专门大的差距;生产要素至关重要的阻碍正在逐步削弱。
设计一个3工位旋转工作台的控制系统设计

任务书课题十二、设计一个3工位旋转工作台的控制系统1.动作特性其工作示意如图所示。
三个工位分别完成上料、钻孔和卸件。
工位1:上料器推进,料到位后退回等待。
工位2:将料夹紧后,钻头向下进给钻孔,下钻到位后退回,退回到位后,工件松开,放松完成后等待。
工位3:卸料器向前将加工完成的工件推出,推出到位后退回,退回到位后等待。
2.控制要求工位2工作台示意图1)用选择开关来决定控制系统的全自动、半自动运行和手动调整方式。
2)手动调整采用按钮点动的控制方式。
3)系统处于半自动工作方式时,每执行完成一个工作循环,用一个起动按钮来控制进入下一次循环。
4)系统处于全自动运行方式时,可实现自动往复地循环执行。
5)系统运动不很复杂,采用4台电机。
6)对于部分与顺序控制和工作循环过程无关的主令部件和控制部件,采用不进入PLC的方法以节省I/O点数。
7)由于点数不多,所以用中小型PLC可以实现。
3.时间安排第1-2天:根据设计任务查阅相关文献;第3-6天:选择一种合适的设计方法,制定详细的设计方案,设计出满足要求的电器控制系统并验证其正确性;第7-8天:编写课程设计报告;绘制相关电气图纸。
第9-10天:提交课程设计报告;进行课程设计答辩。
4.所需提交的材料1)编写输入输出对照表。
包括信号名称、外部元件号、内部继电器号2)绘制PLC外部接线图3)绘制功能流程图;4)编写、调试梯形图或语句表程序目录任务书 0第1章课程设计任务说明 (1)1.1 课题简介 (1)1.2 系统总体方案设计概述 (1)第2章课程设计任务分析 (2)2.1 设备机构组成分析 (2)2.2 设备工作过程分析 (2)第3章控制方案设计 (3)3.1 总体方案设计 (3)3.2 电气系统设计 (4)3.3 电气控制系统设计 (4)3.3.1 系统控制与信号分析 (4)3.3.2 I/O分配表 (5)3.3.3 I/O端子接线图 (6)第4章控制流程分析 (7)4.1 功能图 (7)4.2 梯形图 (8)4.3 语句表 (11)课程设计心得 (14)参考文献 (15)第1章课程设计任务说明1.1课题简介随着信息技术的普及和发展,尤其是跨入2000年后,红外技术得到了迅猛发展,机械加工的方法和手段也逐渐变得丰富起来,各种先进技术被人们引入机械行业中来形成各种新兴学科。
航空转台通用控制系统设计与研究

航空转台通用控制系统设计与研究型、电机类型、编码器点数精确到具体转台。
下位机平台分为数据处理模块、位置跟踪模块、速率校准模块;上位机界面设有综合控制区、单轴控制区、角位置速率显示区、波形显示区。
软件系统由上下位机共同作用完成,可实现控制三个轴、任意两个轴或任意一个轴位置和速率等功能。
转台的精度控制基于误差控制理论,上位机给出的指令值与转台运转实际的反馈值之间的差值为误差,系统的精度目标就是使这个误差等于零,达到指令值等于反馈值。
该误差经过控制算法计算产生一个数字电压值,通过DA 转换为模拟电压输出给电机驱动器,电机驱动器根据给定的电压驱动转台各轴的电机,实现对电机的控制。
利用MATLAB 仿真环境,建立仿真模型,搭建算法控制器,通过算法不断计算,推导出最优的参数组合,实现控制系统的精确控制。
3 通用控制系统原理分析3.1 通用控制系统控制结构通用控制系统主要由电流环闭合回路与位置环闭图2 控制回路图1 控制系统结构图图3 数字PID 控制器原理图图4 通用转台软件结构框图调试程序通过对转台控制系统进行参数整定,根据PID控制算法调节系统的数学模型,通过定点试验方法分别找出最合理的KP与KI数值,得到最完美的算法模型,调试过程通常采用一个参数不变调试另一个参数的办法,不断根据测试状态缩小的数值,且每台转台每轴都需要提前进行大量的调试,调试出固定参数,将得到的数学参数烧写到DSP+FPGA组合控制模块。
控制程序根据已经固定的数学参数模型,通过DSP+FPGA组合控制模块对控制系统执行元件输送特定的命令,并通过DA数字信号转换为模拟信号,此信号作为电机驱动器输入,控制着电机驱动器对相应的电机进行指令控制,控制转台按照控制程序给出的控制指令进行运动,从而实现控制转台的速度、位置、模式、状态写入的功能,此前根据转台的差异性选择不同的转台,同时,程序也会进行判读是否转台选择正确,根据反馈数据分析出问题所在,给出错误提示,及时进行位置制动,防止出现图5 通用转台控制系统界面图结语通过将通用控制系统进行台体选型、电机选型、编码器选型区分出控制台体类型;通过将通用控制系统进行分模块设计,实现任意一轴单独运转、任意两轴运转及三轴连续运转,实现多轴精确定点控制;通过给出任意一轴目标位置及目标速度,实现台体定速、定点运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
简易转台控制系统设计
一、任务
转台是一种可以精密测量角度的设备。
设计制作一个简易的转台,目标是控制指针的转动,实现以下几种功能,包含令指针以一定的角速度转动、以一定的频率和幅值做正弦振荡、快速转到指定的角度等。
二、要求
图1 简易转台系统示意图
1、基本要求
(1)如图1所示,系统采用电机驱动,电机类型任选;
(2)带刻度的圆盘直径不小于10cm,角度最小刻度10度即可;
(3)实现指针以每秒5度的速度匀速旋转;
(4)实现指针正负5度,频率1Hz的正弦振荡;
(5)实现指针正负10度,频率0.2Hz的正弦振荡。
2、发挥部分
(1)设置角度测量装置,测角精度至少0.5度;
(2)PID控制是最常用的闭环控制手段,其中P代表比例环节,它能调节整
个系统的增益,如果比例环节数值较大,系统跟踪常值指令时会出现
超调现象。
指针初始位置设置在0度,要求采用PID控制方法,使指
针角度快速变化到30度;
(3)将比例环节参数调大,令系统在完成(2)的过程中出现超调。
三、说明
(1)尽量使用STC公司的最新系列单片机产品。
(2)减速齿轮和传动机构可以省掉不设计,即电机轴可直接带动指针运动;(3)发挥部分(1)的角度显示可用上位机,也可用液晶屏。
四、评分标准。