四象限工作特性与原理
四象限管理法则
四象限管理法则在管理学领域中,四象限管理法则是一种常用的管理工具,它帮助管理者更好地分析和解决问题,提高工作效率和管理质量。
四象限管理法则源自于史蒂芬·柯维的《七习惯》,它将问题分为四个象限,分别是紧急重要、紧急不重要、不紧急重要和不紧急不重要,通过对问题的分类和处理,帮助管理者更好地安排工作和提高管理效率。
本文将详细介绍四象限管理法则的原理和应用,并结合实际案例进行分析,希望可以帮助读者更好地理解和运用这一管理工具。
一、紧急重要。
紧急重要的问题是需要立即解决的,它们通常是对组织或个人利益有直接影响的问题,需要及时处理以避免损失或带来收益。
管理者在面对紧急重要的问题时,需要迅速做出决策和行动,确保问题得到及时解决。
紧急重要的问题通常包括突发事件、紧急会议、重要客户需求等,这些问题需要管理者全力以赴,确保问题得到妥善处理。
二、紧急不重要。
紧急不重要的问题是需要立即解决,但对组织或个人利益影响不大的问题,它们通常是一些琐碎的事务或无关紧要的事情,但由于时间紧迫,管理者往往会优先处理这些问题,导致忽视了重要的事务。
管理者在面对紧急不重要的问题时,需要审慎判断,避免浪费时间和精力,合理安排工作,确保重要事务得到优先处理。
三、不紧急重要。
不紧急重要的问题是对组织或个人利益有重大影响,但不需要立即解决的问题,它们通常是一些长期规划、战略决策或重要项目,管理者在处理这些问题时,需要有长远的眼光和规划,不要被眼前的紧急事务所迷惑,确保重要事务得到充分重视和处理。
四、不紧急不重要。
不紧急不重要的问题对组织或个人利益影响不大,也不需要立即解决,它们通常是一些琐碎的事务或无关紧要的事情,管理者在处理这些问题时,需要避免浪费时间和精力,合理安排工作,确保重要事务得到优先处理。
四象限管理法则的应用。
四象限管理法则可以帮助管理者更好地分析和解决问题,提高工作效率和管理质量。
在实际工作中,管理者可以通过以下几个步骤来应用四象限管理法则:1. 识别问题,首先,管理者需要识别和分类问题,将问题分为紧急重要、紧急不重要、不紧急重要和不紧急不重要四个象限。
简述科维提出的四象限法则

简述科维提出的四象限法则1.引言1.1 概述科维提出的四象限法则是一种管理和决策工具,旨在帮助人们更好地理解和规划任务的重要性和紧急性。
根据科维的观点,任务可以被归类为重要且紧急、重要不紧急、不重要但紧急以及不重要且不紧急四个象限。
第一象限代表着重要且紧急的任务,这些任务通常是具有紧迫性的重要事项,需要立即处理。
它们是我们日常生活和工作中不能忽视的关键任务,如紧急的工作任务、危机管理和应急情况等。
第二象限代表着重要但不紧急的任务,这些任务具有重要性,但不需要立即处理。
它们是我们具有长期价值的任务,例如制定长期计划、时间管理、个人发展等。
虽然它们没有紧急性,但我们必须认识到这些任务对我们的个人和专业生活的重要性。
第三象限代表着不重要但紧急的任务,这些任务可能是一些突发事件、干扰和应急任务,它们通常并不对我们的长期目标和价值产生直接影响。
这些任务可能会消耗我们的时间和精力,因此我们需要学会有效地管理它们并适时地进行优先处理。
第四象限代表着不重要且不紧急的任务,这些任务通常是一些琐事、娱乐活动和浪费时间的事项。
它们对我们的个人和专业发展没有实质性的帮助,因此我们需要谨慎处理它们,避免过分投入时间和资源。
科维的四象限法则提醒我们,我们应该优先处理重要且紧急的任务,并且要时刻关注和规划重要但不紧急的任务,这样才能真正做到高效管理时间和资源。
这种方法可应用于个人和团队的工作管理、项目计划和时间分配,帮助人们更好地组织任务,提高工作效率,实现个人和专业目标。
1.2文章结构1.2 文章结构本文将按照以下结构展开对科维提出的四象限法则的简述。
首先,在引言部分(章节1)中,将对本文的概述、文章结构以及目的进行说明。
接下来,正文部分(章节2)将详细介绍科维提出的四象限法则。
其中,第一节(2.1 科维提出的四象限法则)将重点讨论科维提出的四象限法则的基本原理和应用场景。
在该节的第一小节(2.1.1 第一象限要点)中,将会详细介绍第一象限的要点,包括什么是第一象限、其特点以及在实际生活中的应用案例等方面内容。
电机的四象限运行

电机的四象限运行(电机与拖动这门课会学习)
把电机的运行速度方向用一条数轴X来表示,代表电磁转矩方向。
把电机的电磁转矩方向用一条数轴Y来表示,代表电机转速的旋转方向。
构成一个平面坐标系XOY,那么第一象限是正转电动,此时转速与转矩旋转方向相同,这是正常的电动模式(假设电机正转)。
第二象限是电机正转,但转矩相反,电机处于发电状态,即回馈制动。
第三象限是反转电动,此时转速与转矩的方向相同,这是电动模式(反转)。
第四象限转速与转矩方向相反,电机处于发电状态,即回馈制动。
四象限工作特性与原理
流同样满足上式,不过此时吸
收的是感性电流, δ的值是U1
超前Us的角度。
从上式可见δ的值与有、无
功电流基波电压的幅值都是以一
对应的。
STATCOM的控制方式
通过以上分析,我们可以得到最简单的电流间接控制方法,即将我们想要的、补偿 的无功电流的参考值Iref作为指令值,通过上面的公式转换的δ的值,然后δ来控制 STATCOM变流器的触发脉冲,使STATCOM交流侧输出的电流跟随参考值动态变化。 其示意图和相关波形如下:
系统模型搭建及仿真结果分析
按照下图所示,在Multisim中搭建基于间接电流控制的STATCOM 的系统仿真模型。 图中用无穷大系统电压的有效值为 220 3V,频率为50HZ,额定负荷为 S=9000+j9000。
系统模型搭建及仿真结果分析
上面是家 补偿器之 前的,下 面的是加 补偿器之 后的,可 见功率因 数提高明 显
D4
T1
VS A
T2
(a)四象限直流-直流变换电路
D1
T3 断
La Ra Ea B
I AB
通
D2
T4
(b)第一 第二两象限变换电路
VS
T1
A
断 T3 La Ra Ea
B
D3
T2 通 IAB T4
D4
(c)第三 第四两象限变换电路
四象限直流—直流变换器 第一、二象限运行等效电路
T1
VS A
T2
D1
PWM整流器拓扑结构
单相PWM整流电路
三相PWM整流电路
26
PWM整流器的分类
• 按直流储能形式:电压型、电流型 • 按电网相数:单相电路、多相电路、三相电路 • 按PWM开关调制:硬开关调制、软开关调制 • 按桥路结构:半桥电路、全桥电路 • 按调制电压分类:二电平电路、三电平电路、多电平电
四象限工作特性与原理

四象限工作特性与原理在工作中,我们常常会面临各种任务和项目。
有些任务紧急而重要,需要我们立即行动;有些任务重要但不紧急,需要合理安排时间;还有一些任务既不紧急也不重要,可以暂时搁置;而另一些任务则是紧急但不重要,我们需要找到合适的方式去处理。
为了更好地管理时间和任务,美国总统埃森豪威尔提出了四象限工作特性与原理,即将任务根据紧急程度和重要性分为四个象限,以便更好地安排和管理工作。
四象限分别是:1. 紧急且重要:需要立即行动的任务;2. 重要但不紧急:需要合理安排时间的任务;3. 紧急但不重要:可以暂时搁置的任务;4. 不紧急且不重要:需要找到合适方式去处理的任务。
接下来,我们将详细探讨这四个象限的工作特性及其原理。
1. 紧急且重要紧急且重要的任务是需要立即行动的工作,因为它们对我们个人或组织的目标和成就有着重大的影响。
这些任务通常是突发事件、紧迫的问题、重要的截止日期等。
如果我们不及时处理这些任务,可能会导致严重的后果。
原理:紧急且重要的任务要优先处理,因为它们直接关系到我们的生活和工作。
在处理此类任务时,我们应该集中注意力、高效工作,并且可能需要调整其他任务的优先级。
2. 重要但不紧急重要但不紧急的任务是那些对我们个人或组织的长期发展和目标实现非常关键,但在短期内没有紧迫需求的工作。
这些任务通常是长期规划、战略发展、个人成长等。
虽然没有明确的截止日期,但我们不能忽视它们的重要性。
原理:重要但不紧急的任务需要我们合理安排时间和资源,确保它们得到足够的关注和处理。
我们可以制定计划、等待合适的时机来处理这些任务,以确保它们不被其他紧急任务所掩盖。
3. 紧急但不重要紧急但不重要的任务是那些需要立即处理,但对我们个人或组织的目标和成就作用有限的工作。
这些任务通常是琐碎的工作、他人的紧急需求、日常事务等。
虽然这些任务可能会占据我们大量的时间,但它们并不直接对我们的长期目标产生重要影响。
原理:我们需要在处理紧急但不重要的任务时保持警惕,以免它们占用我们的时间和精力。
四象限工作法应用-概述说明以及解释

四象限工作法应用-概述说明以及解释1.引言1.1 概述概述四象限工作法是一种高效的时间管理和任务安排方法,可帮助我们更好地组织和规划工作。
它源于斯蒂芬·柯维所著的《第一件要紧的事》一书中提到的时间管理矩阵。
这种工作法将任务分为四个象限,以帮助我们更好地理解和处理不同紧急程度和重要性的工作。
在我们的日常工作和生活中,我们面临着大量的任务和需求,往往感到时间不够用,无法应付各种挑战。
四象限工作法通过将任务分为四个象限,帮助我们明确任务的紧急性和重要性,从而更有针对性地制定工作计划和安排时间。
第一个象限是“重要且紧急”的任务。
这些任务通常是当前就要解决的紧急问题,需要我们立即采取行动解决。
例如,紧急的项目截止日期、突发的客户问题或突发的个人健康问题等。
这些任务要求我们给予高度关注和优先处理。
第二个象限是“重要但不紧急”的任务。
这些任务虽然不需要立即解决,但对我们的长远目标和价值观具有重要意义。
与第一象限不同,我们可以更加从容地安排时间来处理这些任务,以确保我们能够合理规划和充分发挥自己的能力。
例如,制定个人发展计划、学习新的技能或关注自己的身心健康等。
第三个象限是“紧急但不重要”的任务。
这些任务通常是由他人的要求或不必要的干扰所引起的。
尽管它们需要我们立即回应或处理,但它们却不能为我们的长远目标带来真正的贡献。
我们需要学会拒绝或委托这些任务,以确保我们的时间和精力能够更好地用在真正重要的事情上。
第四个象限是“不重要且不紧急”的任务。
这些任务既不紧迫,也不对我们的长远目标产生实质性影响。
它们通常是一些琐碎的、浪费时间的活动,例如社交媒体的浏览、电视剧的追逐等。
我们需要警惕这些任务对我们时间的消耗,并尽量减少它们对我们的干扰。
通过四象限工作法,我们可以更好地认识和解决工作中的紧急与重要的关系,合理安排时间和资源,更高效地完成任务。
掌握四象限工作法可以帮助我们提高个人和团队的工作效率,提升工作质量,并更好地平衡工作与生活的关系。
四象限变流器工作原理
四象限变流器工作原理1.引言1.1 概述四象限变流器是一种重要的电力电子器件,它能够实现直流电到交流电的转换。
其工作原理基于电力电子技术和控制理论,通过控制开关器件的通断,将直流电源经过逆变和变换,输出所需的交流电信号。
四象限变流器的主要特点是能够实现四个不同象限的电流、电压和功率输出。
这四个象限分别代表着正向和反向的电流、电压以及功率输出,在不同工作条件下可以根据需求进行切换。
这一特性使得四象限变流器在电力电子领域中具有广泛的应用空间。
四象限变流器的工作过程可以简要描述为:首先,通过电流传感器和电压传感器,监测输入直流电源的电流和电压信号。
然后,经过电压和电流的控制算法,得出需要输出的交流电信号的波形和频率。
接下来,利用开关器件进行逆变和变压,将直流电源的能量转换为交流电源的能量。
最后,输出所需的交流电信号,供给给定的负载使用。
四象限变流器的工作原理可以应用在多个领域,如电机控制、电力系统调节等。
其在电机控制领域中的应用特别广泛,能够实现电机的正向和反向转动,控制电机的转速和负载特性。
在电力系统调节方面,四象限变流器可以对电网进行有源功率调节,实现对电网的无功功率补偿和电压调节。
总之,四象限变流器通过控制电流和电压的方向和大小,实现了直流到交流的转换,具有广泛的应用前景。
在未来的发展中,随着对电能质量和能源管理的要求越来越高,四象限变流器将会得到更多的应用和研究。
1.2文章结构文章结构部分的内容如下:1.2 文章结构本文将分为三个主要部分来介绍四象限变流器的工作原理。
第一部分是引言部分,其中包括概述、文章结构和目的。
首先,我们将简要概述四象限变流器的基本概念,介绍其在电力电子领域中的重要性。
接着,我们将说明本文的结构,即将分为引言、正文和结论三个主要章节。
最后,我们将阐明本文的主要目的,即为读者提供关于四象限变流器工作原理的详细解释。
第二部分是正文部分,其中包括四象限变流器的基本原理和工作过程。
时间管理的四象限工作法
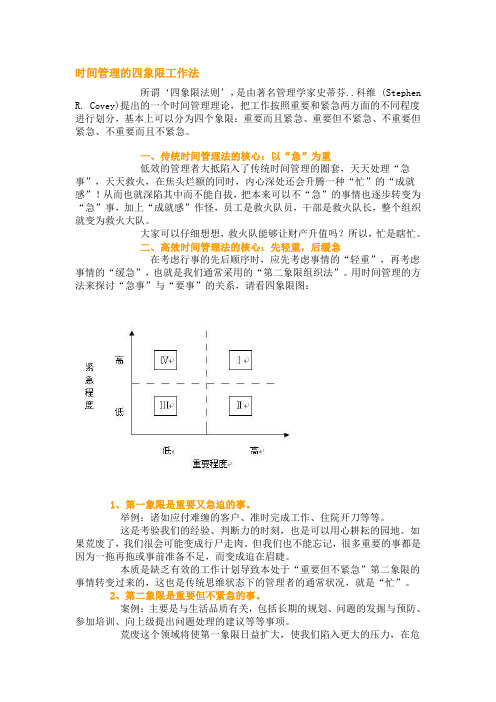
时间管理的四象限工作法所谓‘四象限法则’,是由著名管理学家史蒂芬..科维 (Stephen R. Covey)提出的一个时间管理理论,把工作按照重要和紧急两方面的不同程度进行划分,基本上可以分为四个象限:重要而且紧急、重要但不紧急、不重要但紧急、不重要而且不紧急。
一、传统时间管理法的核心:以“急”为重低效的管理者大抵陷入了传统时间管理的圈套,天天处理“急事”,天天救火,在焦头烂额的同时,内心深处还会升腾一种“忙”的“成就感”!从而也就深陷其中而不能自拔,把本来可以不“急”的事情也逐步转变为“急”事,加上“成就感”作怪,员工是救火队员,干部是救火队长,整个组织就变为救火大队。
大家可以仔细想想,救火队能够让财产升值吗?所以,忙是瞎忙。
二、高效时间管理法的核心:先轻重,后缓急在考虑行事的先后顺序时,应先考虑事情的“轻重”,再考虑事情的“缓急”,也就是我们通常采用的“第二象限组织法”。
用时间管理的方法来探讨“急事”与“要事”的关系,请看四象限图:1、第一象限是重要又急迫的事。
举例:诸如应付难缠的客户、准时完成工作、住院开刀等等。
这是考验我们的经验、判断力的时刻,也是可以用心耕耘的园地。
如果荒废了,我们很会可能变成行尸走肉。
但我们也不能忘记,很多重要的事都是因为一拖再拖或事前准备不足,而变成迫在眉睫。
本质是缺乏有效的工作计划导致本处于“重要但不紧急”第二象限的事情转变过来的,这也是传统思维状态下的管理者的通常状况,就是“忙”。
2、第二象限是重要但不紧急的事。
案例:主要是与生活品质有关,包括长期的规划、问题的发掘与预防、参加培训、向上级提出问题处理的建议等等事项。
荒废这个领域将使第一象限日益扩大,使我们陷入更大的压力,在危机中疲于应付。
反之,多投入一些时间在这个领域有利于提高实践能力,缩小第一象限的范围。
做好事先的规划、准备与预防措施,很多急事将无从产生。
这个领域的事情不会对我们造成催促力量,所以必须主动去做,这是发挥个人领导力的领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
P
jX I
U SsinIR
IU Ssin
R
IR
Q
P (U Ssin)I
P U S 2sin2
R
Q (U Sco s)I
Q U S 2sin (2 )
2R
因此,通过改变STATCOM的电压幅值以及以系统的相 位差就能实现对STATCOM输出的有功,无功的四象限 运行。
当U1>Us, 0 时,
P
Q
P0
Q Us(U1Us) X
电流从系统流向STATCOM且电流相 位超前系统电压90°,装置输出 感性无功。
STATCOM的基本原理
当U1<Us, 0 时,
P
Q
P0
Q U s(U s U 1) X
电流从STATCOM流向系统且电流相 位滞后系统电压90°,装置吸收感 性无功。
当U1=Us, 0 时,
P
Q
PQ0
系统,STATCOM之间的电流为0, 装置和系统无功率交换。
STATCOM的基本原理
当考虑等效阻抗R时:
网侧电压由于需要为电路中的损耗电阻提供有功功率即电流I中有 一定的有功分量,所以网侧电压Us与电流I相差比90度小可表示为
90- 角。
STATCOM的基本原理
决定。
转矩方向与电机转向相同为电动状态,反之为制动状态
直流电机的四象限运行
四象限直流—直流变换器
T1
VS A
T2
D1 T 3
D3
La R a E a B
I AB
D 2 T4
D4
T1
VS A
T2
(a)四象限直流-直流变换电路
D1
T3 断
La Ra Ea B
I AB
通
D2
T4
(b)第一 第二两象限变换电路
VS
T1
A
断 T3 La Ra Ea
B
D3
T2 通 IAB T4
D4
(c)第三 第四两象限变换电路
四象限直流—直流变换器 第一、二象限运行等效电路
T1
VS A
T2
D1
T3 断
La Ra Ea B
I AB
通
D2
T4
(b)第一 第二两象限变换电路四象限直流—直流变换器
第一象限工作
工作模式:
降压(将Vd的电压 降低后送到负载)
STATCOM的基本结构设有一个并网电压源逆变器,通过某种控制方式,在其逆变输 出侧产生一个 幅值可调、相位可调与电网同步的正弦电压。
STATCOM的基本原理
电网电压用Us表示,STATCOM电压用U1表示,则电抗器上的电压为Us和U1 的差,STATCOM从电网吸收的电流用 I 表示。
当不考虑等效阻抗R时:
四象限的工作特性与控制原 理
——电气1310班“六个核桃” 小组电力电子研讨
四象限的工作特性与控制原理
四象限直流—直流变换器
Ud
第二象限: Ud>0, Id<0
第三象限: Ud < 0, Id < 0
第一象限: Ud>0, Id>0
Id
第四象限: Ud < 0, Id>0
直流电动机的特性
直流电机电枢绕组的反电势Ea与其励磁磁通和转速N 的乘积成正比:
Ea KeN
电枢电压平衡方程为:
转速高低由电枢电 压的大小决定,转 速方向由电枢电压
的方向决定。
E aV A BR aIA B V AB
NE a V AB R aIAB V AB
K e
K e
K e
电机的转矩方程为:
Te KTIAB
转矩大小由电枢电流 的大小决定,转矩方 向由电枢电流的方向
B
D3
T2 通 IAB T4
D4
(c)第三 第四两象限变换电路
四象限直流—直流变换器
第三象限工作
工作模式:
降压(T3 D4构成 Buck降压变换器)
输出电压方向: 反向(VAB<0)
输出电压大小:
T on
V V BA
D
TS
输出电流方向: 反向
电机运行于反向电动 状态,能量由直流输入电 源供向负载。
I AB
通
D2
T4
(c)升压变换电路
工作模式: 升压(将负载的电压升 高后向Vd回馈电能)
输出电压方向: 正向 输出电压大小:Vd 11DVABVAB 输出电流方向: 负向
电机运行于正向制动状态, 能量由负载向直流输入电源 回馈。
四象限直流—直流变换器 第三、四象限运行等效电路
VS
T1
A
断 T3 La Ra Ea
STATCOM的控制方式
间接电流控制 直接电流控制 分相不对称控制 模糊PI控制 鲁棒非线性控制
STATCOM的控制方式
间接电流控制
间接电流控制是指对STATCOM 装置中逆变器所产生 的交流电压基波的相位和幅值的控制,以此来间接 控制STATCOM交流侧电流。
间接电流控制分为单δ控制和δ 与θ 配合控制。 采用单δ 控制时,虽然简单有效,但忽略了对θ 的控制,使得直流侧电容电压稳定困难、损耗增加。
当STATCOM输出电压超前于系统电压时装置处于感性 工作状态:
P
jX I
U SsinIR
IU Ssin
R
U1
UL
IR
P (U Ssin)I
P U S 2sin2
R
Us
Q
Q (U Sco s)I
Q U S 2sin (2 )
2R
I
STATCOM的基本原理
当STATCOM输出电压滞后于系统电压时装置处于容 性. 工作状态:
四象限直流—直流变换器
第四象限工作
工作模式:
升压(T4 D3构成Boost 升压变换器)
输出电压方向:
正向
VS A
A
La Ra Ea
iAB
D3
B
T4
输出电压大小: Vs 11DVABVAB
输出电流方向: 反向
电机运行于反向制动状 态,能量由负载供向直 流输入电源。
STATCOM
静止同步补偿器( Static Synchronous compensator STATCOM )是柔性交流输电 系统(FACTS)的重要设备之一,在稳定系统电压、提高功率因数、增加传送容量 等方面发挥着重要的作用,代表着无功补偿技术的发展方向。
T1
VS A
T2
D1
T3 断
La Ra Ea B
I AB
通
D2
T4
输出电压方向: 正向
输出电压大小:
T on
V V AB
D
TS
输出电流方向: 正向
电机运行于正向电动 状态,能量由输入直流电 源供向负载。
(b)降压变换电路
四象限直流—直流变换器
第二象限工作
T1
VS A
T2
D1
T3 断
La Ra Ea B
在δ与θ 配合控制中,δ角的控制用于无功功率 控制,而对θ角进行控制可起到维持电容电压稳定 的作用。因此可对无功功率控制采用逆系统非线性 PI方法,对STATCOM 直流侧电容电压采用传统的PI 控制方法,两个控制环互相独立,互不干扰。