CCW软件应用指南
W-CW数据处理工具使用指导书-20060615-B-3.0
W-CW数据处理工具使用指导书(仅供内部使用)华为技术有限公司版权所有侵权必究修订记录目录1 概述 (5)2 工具的安装 (5)3 数据转换 (5)4 操作 (7)5 项目操作 (8)5.1 创建项目 (8)5.2 打开项目 (9)5.3 导入数据后的界面显示 (10)5.4 数据的操作 (11)5.4.1 移除数据文件 (11)5.4.2 数据显示 (11)5.4.3 数据删除 (13)5.4.4 数据导出 (15)5.5 地图操作 (17)5.5.1 图层 (17)5.5.2 地图操作工具 (20)6 总结 (21)图目录图1 导入路测数据 (6)图2 Export data设置 (6)图3 Setting设置项 (7)图4 CW Data Editor运行主界面 (8)图5 设置项目名称和路径 (9)图6 CW数据文件导入对话框 (9)图7 数据离散与地理平均设置对话框 (9)图8 导入数据之后workspace显示 (10)图9 已导入数据文件的移除 (11)图10 数据显示 (12)图11 数据显示结果 (12)图12 数据显示弹出式菜单 (13)图13 删点前 (14)图14 删点后 (14)图15 数据导出操作(一) (15)图16 数据导出对话框 (15)图17 数据导出操作(二) (16)图18 数据导出操作(三) (17)图19 打开图层控制 (18)图20 图层控制对话框 (18)图21 添加背景地图对话框 (19)图22 添加背景地图后的数据显示结果 (19)图23 地图工具条 (20)1 概述CW数据处理工具CW Data Editor是UMTS网络规划部开发的一个数据分析工具,可以针对从路测设备导出的CW测试数据,根据不同的需求进行处理,将输出结果作为UNET等仿真软件模型校正的输入数据。
其主要功能包括:CW测试数据的管理,包括数据的导入、导出和合并;CW测试数据的处理,包括数据离散化、地理平均和删点;CW数据分析结果的显示,包括地理化显示和表格显示。
CCW软件的应用
目录一、手册目的: (2)二、启动CCW软件并介绍CCW软件环境。
(2)1、启动CCW软件:请按照以下两种方法启动CCW软件: (2)2、CCW软件环境的介绍: (2)三、CCW程序的编辑。
(7)3.1新建程序。
(7)3.2编译程序。
(11)3.3程序的调试。
(11)3.3.1 链接网络。
(11)3.3.2 下载程序: (12)3.3.3 控制器出现故障及故障清除 (13)3.3.4 程序的调试。
(13)四、关于控制器配置窗口应用的说明: (15)一、 手册目的:为了便于用户更好地熟悉并使用CCW软件,让用户充分理解CCW软件关于“软件编程、人机界面开发及驱动器配置”一体化功能的优势,再次基础上给用户带来最大限度的应用价值。
二、 启动CCW软件并介绍CCW软件环境。
1、启动CCW软件:请按照以下两种方法启动CCW软件:方法1:开始→所有程序→Rockwell Automation→CCW File,点击 ;方法2:或者双击桌面上CCW快捷键 。
2、CCW软件环境的介绍:启动CCW软件过程中,我们会看到以下界面,如图2.1所示:图2.1在这里我们可以两个重要的信息:1、CCW软件的版本,此处为5.01;2、图标显示了CCW 一体化软件功能,即可以实现软件编程、人机界面开发及驱动器配置。
打开CCW软件以后,进入CCW软件,如图2.2所示:包括点开3:CCW 里可以打开和栏里可以进行为快速为设备括控制器、扩开+可以浏览设4的菜单栏及具栏,我们依和关闭所要显行配置通讯驱速建议窗口,备工具箱窗口扩展模块、驱设备树形图架图2.2工具栏:如依然可以在显示的窗口,驱动等。
为显示浏这里告诉我,其中Cata 驱动器、安全架构,如图2 同Windows File 菜单里进如Device T 览窗口。
具体们怎么来新建log 为欲添加模块、马达控图2.32.4 Office 软件开进行新建项目Toolbox\Toolb 体如下:建项目怎么来加的备选设备控制设备以及2开发环境,通目、保存项目box ;在Com 来寻找帮助等备:及显示屏。
CCW软件应用指南

“新 :功能块图” 。 FBD
(New FBD: Function Block Diagram)
21
5.
右键单击
,选择“重命名” : UntitledFBD
(Rename)
6. 键入 Process_SIM 并按回车键:
22
7. 右文键件单”击(Im“p项or目t -管> I理m器po”rt(EPxrocjheacntgOergFailnei)z,er如) 中图的所示M。icro830,从弹出菜单中选择“导入 导入交换
10
导入和导出用户定义功能块
本章将介绍如何创建和导出 SIM_FB 用户定义功能块 (UDFB),以便其它项目导入。 1. 创建一个新的 Micro830 项目。
2. 右选键择单“击新“ST项:目结管构理化器文”本(P”ro(jNecetwOSrgTan:Siztreur)ct中ur的ed“T功ex能t):块”(Function Blocks),选择“添加”(Add) 并
REAL REAL GAIN_PID AT_PARAM BOOL BOOL BOOL
完成后,变量表应如下图所示:
初始值
10.0 0 -
15. 双击 Process_SIM,将显示编程工作区。
26
16. 从“工具箱”(Toolbox) 中选择“块”(Block),并将其拖放到编程工作区中
将出现“指令块选择器” 窗口。 17.
将出现“导入 导出” 窗口,浏览到文件 。 8.
/
(Import/Export)
Micro830.Micro830.SIM_FB.7z
选请前中参S见IM上_F一B章,节单了击解“有导关入如”何(Im创p建or此t)用将户导定入义该功文能件块。的然详后细,信关息闭。窗口。注:如果未显示 , SIM_FB
HOBBYWING型号产品使用指南说明书

06Gearing1. With the motor direction set to CCW, take the graduation/value after “CCW” on the motor case as the starting point when adjusting the timing. With the reversed triangle pointing at a value /graduation, the smaller/bigger the value, the smaller/bigger the timing. The timing is 40 degrees in picture 1.2. With the motor direction set to CW, take the graduation/value after “CW” on the motor case as the starting point when adjusting the timing. (With the reversed triangle pointing at a value/graduation, the smaller/bigger the value, the smaller/bigger the timing. The timing is 20 degrees in picture 1.3. The motor timing is 30 degrees by default (as shown in picture 2). The motor timing should be within 30 to 40 degrees if you want to activate the Turbo timing. And the timing can be within 20 to 40 degrees if you have no intention to activate the Turbo timing.05Timing Adjustment07Assembly and Disassemblycorrectness of all connections.In order to make the motor have longer service life and higher efficiency, we suggest to regularly check the bearing and clean the dirt in the motor. The specific time depends on the frequency of using the motor and the site conditions.When installing, please follow the steps in the following assembly drawing; when disassembling, follow the reverse steps.Parts ListUSER MANUALXERUN 4268/4274 G3Sensored Brushless Motor• The protection grade of Off-Road motor is IP5X. Its excellent dustproof performance can easy to deal with various Off-Road dusty track environment.• On the premise of improving the performance, the design of 4268SD G3 is optimized which extremely reduce the weight of motor. The weight of 1900KV / 2200KV is 20g / 45g lighter than peers. The light motor is convenient for the driver to adjust the balance performance of the vehicle.Back End Bell x 1PcsStator Set x 1PcsScrews for Fastening the Back End Bell x 2PcsM3*10Rotor x 1PcsReasonable selection of gear ratio is very important. Improper gear ratio may bring you great loss. Please according to the following points to select the correct gear ratio!1. The working temperature of the motorThe motor temperature should be lower than 100 degrees Celsius (212 degrees Fahrenheit) in operation. Because high temperature may cause the magnets to get demagnetized, the coil to get melt and short circuited, and the ESC to get damaged. A suitable gearing ratio can effectively prevent the motor from overheating.2. The principle of selecting gear ratioTo avoid the possible damage to ESC and motor caused by the overheat, please start with a small pinion/a big FDR and check the motor temperature regularly. If the motor and ESC temperature always stay at a low level during the operation, change a big pinion/a low FDR and also check the motor temperature regularly to ensure that the new FDR is suitable for your vehicle, local weather and track condition. (Note: For the safety of electric devices, please check the ESC and motor temperature regularly.)XERUN 4268/4274XERUN 4268/4274XERUN 4268XERUN 427401注意事项02产品特色07装配说明06齿比选择1、当电调设置的电机转动方向为CCW时,以电机壳上CCW后面的刻度为准,箭头指向的数值越 小,代表进角越小,箭头指向的数值越大则进角越大。
CCW软件入门指南

指针设备
任何 Windows 兼容的指针设备
任何 Windows 兼容的指针设备
5
安装 CCW 软件(标准版)
本章将介绍您如何安装 CCW 标准版软件。 1. 插入一体化编程组态软件 (CCW) 。 DVD-ROM
如果软件不能自动启动,则请浏览 CD 的内容, 双击一体化编程组态软件安装程序图标。 2. CCW 安装向导启动后,请按照安装说明进行操作。选择安装语言,然后单击“继续”(Continue)。
22. 我们希望第二个梯级按以下方式工作: 若: 东西方向黄灯亮起至少两秒钟, 则: 东西方向的交通信号灯从黄灯切换为红灯,南北方向的交通信号灯从红灯切换为绿灯。
23. 第二个梯级中输入,如下所示。
33
24. 接下来两个梯级在形式上与前两个梯级相同,因此我们可以使用剪切和粘贴操作,然后只需为每个指 令编辑变量分配。单击梯级 1 左侧深蓝区域,然后按住 Shift 键并单击梯级 2 左侧的深蓝区域,选中 这两个梯级。单击右键并选择“复制”(Copy)。
2
简介
本文档将通过创建“交通信号灯”控制项目来学习 Micro800 和 CCW 的基本功能。十字路口交通信号灯 项目控制程序通过车辆传感器来监视流量。您需要的软件和硬件如下所示。
要求
硬件要求: , Micro810 2080-LC10-12QWB , Micro830 2080-LC30-16QWB 标准 USB 电缆 软件要求: 一体化编程组态软件 (CCW),版本 1.01 或更高版本 RSLinx,版本 V2.57 或更高版本
29
12. 释放鼠标按钮后,将弹出“变量选择器”(Variable Selector) 画面。选择 NS_RED_LIGHTS 并单击 “确定”(OK)。
清华三维软件说明书(7-10章)
第七章 常用编辑
图 7-15 选择定位导航器
显示所有地物: 操作步骤:
(1)在选择集操作窗口上,点
(2)点 (3)点地物分类或注记分类 (4)点下拉框,选择分类号,点 或 显示选择集对象 操作步骤:
逐个显示。
61
清华山维·软件说明书
(1)选择对象后
(2)点下 (3)点 或 注:逐个显示功能
边界线,延伸所选择的地物(如图 7-9 )。 (2) 指定边界线:选择延伸边界线,右键或确认回车,点击欲延伸的地物线
段。 (3) 画线选择延伸对象批量延伸:选择延伸边界线,右键或确认回车,画线
批量选择需要延伸的地物,将批量选择的所有地物延伸到延伸边界线上。
图 7-8 延伸
56
图 7-10 裁剪
第七章 常用编辑
功能启动: 菜单启动:编辑 - 〉打断 工具条启动:几何对象编辑工具栏 - 〉 命令行启动:LineBreak 功能描述:在线的任意位置将线(面)对象 (直线或曲线)打断分成两段;(如
58
第七章 常用编辑
图 7-13) 操作方法: (1) 选择一条线,在线上点击两点,截去两点之间的部分,将原线段分成两
7.9 延伸
功能启动: 菜单启动:编辑 - 〉延伸 工具栏:几何对象编辑- 〉 命令行启动: Extend
图 7-7 平移旋转(缩放)
55
清华山维·软件说明书
功能描述:将某条线段延伸到指定的边界线上。(如图 7-8 ) 操作方法: (1) 自动寻找边界线: 点击欲延伸的线段近端,系统会自动寻找最近的延伸
3) 在工具栏上关闭一些显示开关,如:“点选择 开关”、 “面选择开关”或“注记选择开关” 而保留打开“线选择开关”从而减少显示负担, 使得图形在逐步放缩过程中快速刷新显示。见 图 7-17
CCRW程序简介

输出信号映射程序段 B002_MapOutputs
机器人通讯程序段 V100
Copyright © 2011 Intoway Automation, Inc. All rights reserved.
5
动作程序段 Sxxx
工位动作顺序
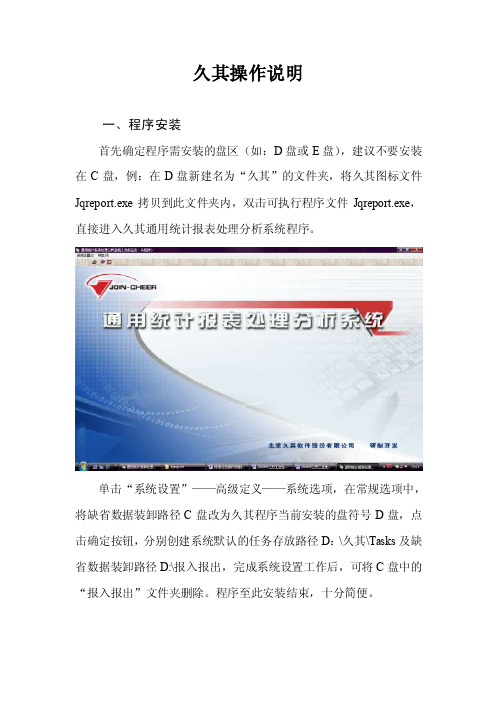
工位动作的程序段通常按照实际动作顺序排列,从右 图可知,AA110工位的动作顺序如下: Step1:工件放到位
.Out输出信号为1时,将关闭 动作的记忆位.Mem置1,同 时将反向动作(打开)的记 忆位清零。反之亦然。 该记忆位将用来判断夹具动 作是否超时,后文将介绍 夹具动作的主体逻辑到此为止,以下是辅助逻辑,包括夹具动作的报警、触摸屏操 作的逻辑
Copyright © 2011 Intoway Automation, Inc. All rights reserved. 11
Copyright © 2011 Intoway Automation, Inc. All rights reserved. 10
动作程序段 Sxxx
夹具动作程序
PM1表示本工位的1号阀岛 V1表示阀岛上的第一片电磁 阀 S14表示关闭动作,S12表示 打开动作 PM1.O.V1S14表示关闭PM1 上的V1阀,该点将在 B002_MapOutputs程序段中 控制阀片动作,后文将介绍 。
Tips:干涉条件通常是考虑机械上的安全性,无论在手动模式还是自动模式,都必须满 足干涉条件,夹具才能动作,而.Auto自动条件只有自动模式才考虑,手动模式下不用 考虑,这点在后文中将介绍。 如果干涉条件没有写好,调试时就可能发生机械撞到、损坏甚至机器人碰臂等事故
Copyright © 2011 Intoway Automation, Inc. All rights reserved.
久其操作指南
久其操作说明一、程序安装首先确定程序需安装的盘区(如:D盘或E盘),建议不要安装在C盘,例:在D盘新建名为“久其”的文件夹,将久其图标文件Jqreport.exe拷贝到此文件夹内,双击可执行程序文件Jqreport.exe,直接进入久其通用统计报表处理分析系统程序。
单击“系统设置”——高级定义——系统选项,在常规选项中,将缺省数据装卸路径C盘改为久其程序当前安装的盘符号D盘,点击确定按钮,分别创建系统默认的任务存放路径D:\久其\Tasks及缺省数据装卸路径D:\报入报出,完成系统设置工作后,可将C盘中的“报入报出”文件夹删除。
程序至此安装结束,十分简便。
二、参数装入单击“系统设置”——“数据装入”,进入数据装入向导界面,通过“数据位置”右侧的文件夹按钮(下图红色标示)选择参数文件存放的路径,可在“装入数据信息”中看到任务相关信息,确定无误后,选择“下一步”,在新窗口中选择基层参数、简表和分析表,选择装入到新建任务。
选择装入到新建任务时会出现一个窗口,这个窗口用于设置新任务的一些基础选项,直接选择确定就可以了。
选择下一步,选择开始。
任务参数装入完成后会提示数据装入完成。
选“是”将新装入参数设置为当前任务。
出现如下界面:注意:第一次装入参数,选择“装入到新建任务”,以后同一任务参数的更新或者数据的装入都应在原任务下,选择“装入到当前任务”。
三、数据导入企业基层数据除直接录入外,还可以通过数据转换来实现对基层数据的收集,但进行转换的源头数据必须严格按照规定的久其文件格式创建。
如:年报名录库文件名统一命名为“MLK_320581.00”,其他几张年报如下:分别对应为 B103-1_3205581.00B103-2_320581.00B104-3_320581.00B109_320581.00。
三个代码各地的地址码,如虞山镇为100,梅李镇为101网上年报下载后可统一下发,网上先报全的也可以自行下载后重命名。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Micro800™ 和一体化编程组态软件应用指南目录第 1 章:对 Micro800 固件进行闪存更新第 2 章:导入和导出用户定义功能块第 3 章:创建新功能块程序第 4 章:创建新结构化文本程序第 5 章:PanelView Component 的 CCW 操作第 6 章:PowerFlex 变频器的 CCW 操作第 7 章:温度控制器的 CCW 操作要求硬件要求::硬件要求Micro810,2080-LC10-12QWBMicro830,2080-LC30-16QWBMicro830 功能性插件,2080-SERIALISOL标准 USB 电缆软件要求::软件要求一体化编程组态软件 (CCW),版本 1.0RSLinx,版本 V2.57第 1 章 -对 Micro800 固件进行闪存更新对 Micro800 固件进行闪存更新本章将介绍如何使用 ControlFLASH 对 Micro800 控制器中的固件进行闪存更新。
在计算机上安装一体化编程组态软件时,可以安装 ControlFLASH 或通过最新的 Micro800 固件更新 ControlFLASH。
1. 首先使用 RSWho 通过 USB 验证 RSLinx Classic 与 Micro800 控制器之间是否成功通信。
(Micro81012 点使用 12PtM810_xxxxx 驱动程序,Micro830 使用 AB_VBP-x 驱动程序)。
2. 启动 ControlFLASH 并单击“下一步下一步””(Next):3. 选择要更新的 Micro800 的目录号,然后单击“下一步下一步””(Next):4. 在浏览器窗口中选择控制器,然后单击“确定确定””(OK):5. 如果您看到以下画面(仅限 Micro810),请保留“插槽编号确定””插槽编号””(Slot Number)为0,并单击“确定(OK)。
6. 单击“下一步完成””(Finish) 和“是”(Yes) 启动更新:下一步””(Next) 继续,检验版本,然后单击“完成7. 随后出现的画面中将显示下载进度:8. 如果您看到以下错误消息,请检查控制器是否发生故障或处于运行模式。
确定””(OK)重试。
如果是,请清除故障或切换至程序模式,单击“确定9. 闪存更新完成后,您应该会看到一个类似以下画面的状态画面。
单击“确定确定””(OK) 完成:第 2 章 -导入和导出用户定义功能块导入和导出用户定义功能块导入和导出用户定义功能块本章将介绍如何创建和导出 SIM_FB 用户定义功能块 (UDFB),以便其它项目导入。
1. 创建一个新的 Micro830 项目。
2. 右键单击“项目管理器”(Project Organizer) 中的“功能块”(Function Blocks),选择“添加”(Add) 并选择“新 ST:结构化文本”(New ST :Structured Text):3. 右键单击 UntitledST,选择“重命名”(Rename) 并键入“SIM_FB”:4. 双击 SIM_FB 并键入以下内容:5. 双击 SIM_FB 下的“本地变量”(Local Variables) 并输入以下内容:6. 右键单击 SIM_FB 并选择“构建”(Build):如果构建发生任何错误,则请更正错误并重新选择“构建”(Build),直至最终完成并且未发生任何无误。
7. 右键单击“项目管理器”(Project Organizer) 中的 SIM_FB,选择“导出”(Export) 并选择“导出程序导出程序””(Export Program):8. 单击“导出导出””(Export):9. 浏览到保存文件夹的位置,单击“保存保存””(Save):10. 要在未来的项目中使用 SIM_FB,则请创建一个新项目并右键单击“项目管理器”(Project Organizer)中的 Micro830,选择“导入”(Import)并选择“导入交换文件”(Import Exchange File):11. 单击“浏览打开””(Open):浏览””(Browse),导航到相应文件夹的存储位置,选择文件并单击“打开12. 选中 SIM_FB,单击“导入输出””(Output) 窗口中确认是否已成功导入:导入””(Import),然后在“输出13. 单击“取消取消””(Cancel) 将关闭“导入导出”(Import Export) 画面。
第 3 章 -创建新功能块程序创建新功能块程序本部分将介绍如何创建新功能块程序。
该功能块程序中将使用PID 标准功能块。
此外,还将导入用户定义功能块用于模拟过程值。
1. 从“开始”(Start) 菜单中启动一体化编程组态软件:“开始 所有程序 罗克韦尔自动化 CCW一体化编程组态软件”(Start -> All Programs -> Rockwell Automation -> CCW -> ConnectedComponents Workbench)。
或者,双击桌面上的快捷方式。
2. 在“一体化编程组态软件”(Connected Component Workbench) 窗口中,将“设备工具箱设备工具箱””(Device Toolbox) 中“目录目录””(Catalog) 窗口下的 2080-LC30-16QWB 拖放到“项目管理器项目管理器””(Project Organizer) 窗口中 - 新项目便创建完成了。
3. 在“项目管理器名称””(Name) 字段中输入 FBD_Program。
项目管理器””(Project Organizer)的“名称4. 右键单击“项目管理器程序””(Programs),选择“添加添加””(Add) 并选择项目管理器””(Project Organizer)中的“程序功能块图””(New FBD: Function Block Diagram)。
“新 FBD:功能块图5. 右键单击 UntitledFBD,选择“重命名重命名””(Rename):6. 键入 Process_SIM 并按回车键:7. 右键单击“项目管理器项目管理器””(Project Organizer) 中的 Micro830,从弹出菜单中选择“导入 导入交换文件””(Import -> Import Exchange File),如图所示。
文件8. 将出现“导入/导出导出””(Import/Export) 窗口,浏览到文件 Micro830.Micro830.SIM_FB.7z。
导入””(Import) 将导入该文件。
然后,关闭窗口。
注:如果未显示 SIM_FB,选中 SIM_FB,单击“导入请前参见上一章节了解有关如何创建此用户定义功能块的详细信息。
9. 功能块“SIM_FB”将导入到“项目管理器项目管理器””(Project Organizer)中。
SIM_FB 结构化文本程序的内容如下所示:10. 双击“项目管理器项目管理器””(Project Organizer) 中的 Process_SIM,对功能块程序进行编辑。
11. 编程需要使用功能块图 (FBD) 编程“工具箱”(Toolbox)。
12. 将开发以下程序逻辑。
• Average 功能块用作模拟量输入仿真的采样速率。
•PID 功能块用于生成控制值 (CV),以控制过程值 (PV) 跟踪设定值 (SV)。
•SIM_FB 是一个采用 FIFO 概念的仿真器块,用于延迟对 PID 功能块的反馈。
Average 功能块PID 功能块SIM_FB 功能块项目管理器编程工作区FBD 编程工具13. 双击“项目管理器本地变量””(Local Variables)。
项目管理器””(Project Organizer) 中 Process_SIM 下的“本地变量14. 在 Process_SIM-VAR 选项卡中输入以下变量。
名称数据类型初始值SV REAL 10.0FB REAL 0PID1_G GAIN_PID -PID1_AT AT_PARAM -AUTO_RUN BOOL -INIT BOOL -PID1_AT_EXEC BOOL -完成后,变量表应如下图所示:15. 双击 Process_SIM,将显示编程工作区。
16. 从“工具箱”(Toolbox) 中选择“块”(Block),并将其拖放到编程工作区中17. 将出现“指令块选择器”(Instruction Block Selector) 窗口。
18. 从下拉菜单中选择 AVERAGE 功能块。
19. 创建 AVERAGE_1 实例,单击“确定确定””(OK) 继续。
该功能块将显示在工作区中。
20. 选择“块”(Block),再次将其拖放到编程工作区中。
21. 从下拉菜单中选择 IPIDCONTROLLER 功能块。
22. 创建 IPIDCONTROLLER_1 实例。
23. 该功能块将显示在编程工作区中。
24. 选择“块”(Block),再次将其拖放到编程工作区中。
25. 从下拉菜单中选择 SIM_FB 功能块。
26. 创建 SIM_FB_1 实例。
27. 完成步骤 15 - 26 后,编程工作区中应显示 3 个功能块,如下所示。
28. 从“工具箱”(Toolbox) 中选择“变量变量””(Variable),并将其拖放到编程工作区中。
将其与IPIDCONTROLLER_1 功能块的 SetPoint 相连,如下所示:29. 然后选择“本地变量-Process_SIM”(Local Variable-Process_SIM)中的 SV,将其分配给IPIDCONTROLLER_1 的Setpoint。
30. SV 会将参数值传递给 IPIDCONTROLLER_1 的SetPoint。
31. 为如下所示的 IPIDCONTROLLER_1 参数重复步骤 28-30。
IPIDCONTROLLER 参数本地变量 – Process_SIM值Feedback FBAuto AUTO_RUNInitialize INITGains PID1_GAINSAutoTune PID1_AT_EXECATParameters PID1_ATErrorMode032. 完成后,IPIDCONTROLLER_1 应如下图所示:33. 单击 IPIDCONTROLLER_1 的Output,将其与 SIM_FB_1 的B_IN 相连。
如图所示。
34. 然后将 SIM_FB_1 的 B_OUT 与 AVERAGE_1 的 XIN相连。
35. 在 AVERAGE_1 的N 处连接一个变量,并输入采样周期值 5。