基于Hough变换的道路边界提取方法
图像处理作业hough变换的边缘提取

图像处理期末作业姓名: 学号:97院系:信自院通信系专业:信号与信息处理用Hough变换提取边界直线Hough变换是1962年山Paul Hough提出来的。
它所实现的是一种从图像空间到参数空间的映射关系。
它具有一系列的优点。
例如,山于根据局部度量来计算全面描述参数,因而对于区域边界被噪声干扰或者其他LI标遮盖而引起边界发生瞬间间断的情况,它具有很好的容错性和鲁棒性。
•原理Hough变换是图像处理中从图像中识别儿何形状的基本方法之一。
Hough变换是一种利用表决原理的参数佔计技术。
其基本原理在于利用图像空间和Hough参数空间的点与线的对偶性,把图像空间中的检测问题转换到参数空间。
通过在参数空间里进行简单的累加统计,然后在Hough参数空间寻找累加器峰值的方法检测直线cHough变换的实质是将图像空间内具有一定关系的像元进行聚类,寻找能把这些像元用某一解析形势联系起来的参数空间累讣对应点。
在参数空间不超过二维的情况下,这种变换效果理想。
将原始图像空间的给定的曲线表达形式变为参数空间的一个点,这样就把原始图像中给定曲线的检测问题转化为寻找参数空间的峰值问题,也即是把检测整体特性转化为检测局部特性。
比如直线、椭圆、圆、弧线等。
简而言之,Hough变换思想是:在原始图像坐标系下的一个点对应了参数坐标系中的一条直线,同样参数坐标系的一条直线对应了原始坐标系下的一个点,然后,原始坐标系下呈现直线的所有点,它们的斜率和截距是相同的,所以它们在参数坐标系下对应于同一个点。
这样在原始坐标系下的各个点的投影到参数坐标系下之后,看参数坐标系下没有聚集点,这样的聚集点就对应了原始坐标系下的直线。
如果参数空间中使用直线方程,当图像空间直线斜率为无穷大时,会使累加器尺寸和变很大,从而是计算复杂程度过大,为解决这一问题,釆用极坐标方程,变换方程如图1所示。
p = xcos&+ ysinO根据这个方程,原图像空间中的点对应新参数空间中的一条正弦曲线,即点-正弦曲线对偶。
基于Hough变换的道路边缘提取

6 2
交通 与 计 算 机 2 0 0 8年 第 1 期 第 2 6卷 总 1O期 4
基 于 Ho g u h变换 的 道路 边 缘 提取 *
乔 洁 李 京 华 杨 志 荣
( 西北 l 业 大 学 西 安 7 0 7 ) 丁 1 0 2 摘 要 在 以 像 处 理 技 术 为 基 础 的视 觉 导 引 方 式 下 , 出 _ 一 种 基 于 Ho g 提 r u h变 换 的 道 路 边
步骤 1 选择- 个初始 闽值 的估计 值 7。 一 一 ’ 。 :
一
直线 ; 边缘线 与路 _ 背景具 有强 烈的对 比度 , 面 在灰
度 图像 中表 现 为灰 度 值差 别较 大 , 面背 景有 时 路 比较 杂乱 。依据 道路 边缘 像 的特点 , 者先 笔 应用 中值 滤 波 及维 纳 滤波 对 图像 进行 预处 理 ; 其 次, 利用 自适 应 值 法 对预 处删 后 的 像进 行 分 割; 然后 . 用数学 形态学 埘分 割后 的 像去 噪 。 采
在 实 际 的 图像 获取 过程 中 , 由于路 面情 况 比 较复杂 , 可能 存在 污迹 、 杂物干扰 , 采样量化 、 在 传 递时都 会带来 噪声 。针 对这些情 况 可采用维 纳滤 波进 行 图像 的 噪声 处理 , 纳滤 波 可实现 自适 应 维
去 噪 , 白 噪声 滤 波 效 果 较 好 。 对
f 验 结 果 表 叫 , 方 法 埘 复杂 的道 路 环 境 具 有 较 好 的 适应 性 。 j l = 此 关 键 词 智 能 乍辆 ; 觉 导 引 ; 缘 提 取 ; u h变 换 视 边 Ho g 中 图 法 分类 号 : 3 1 4 TP 9 . 1 文 献标 识 码 : A
基于改进Hough变换的城市道路网络提取算法

中图分类号 : T P 3 7
文献标识码 : A
a o i : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 6 - 2 4 7 5 . 2 0 1 3 . 0 3 . 0 1 6
Ci t y Ro a d - n e t Ex t r a c t i o n Al o g o r i t h m Ba s e d o n I mp r o v e d Ho u g h Tr a n s f o r m
t i me c o mp l e x i t y a n d s p a c e c o mp l e x i t y a r e v e r y l a r g e ,t h i s p a p e r ma k e s Ho u g h t r a n s f o m r t o s e a r c h l i n e s e g me n t b y a d d i n g a t wo - d i me n s i o n a l c o u n t e r ,a n d u s e s C a n n y a l g o it r h m t o d e t e c t e d g e p i x e l wh i c h d e c r e a s e s c o mp u t a i t o n l a c o mp l e x i t y a n d i n c ea r s e s e x - t r a c t i o n a c c u r a c y .Ac c o r d i n g t o t h e c h a r a c t e is r t i c s o f c i t y r o a d n e t wo r k o f s a t e l l i t e, i f r s t p r o c e s s e s t h e i ma g e, t h e n c h e c k s t h e c i t y r o a d - n e t b y u s i n g i mp r o v e d Ho u g h t r a n s f o m ,t r h e e x p e i r me n t p ov r e s t h e e f i c i e n c y . Ke y wo r d s :Ho u g h t r a n s f o r ms ;r o a d — n e t e x  ̄a c i f o n;t h r e s h o l d — s e g me n t a t i o n
基于Hough变换的道路边缘提取

基于Hough变换的道路边缘提取
乔洁;李京华;杨志荣
【期刊名称】《交通信息与安全》
【年(卷),期】2008(026)001
【摘要】在以图像处理技术为基础的视觉导引方式下,提出了一种基于Hough变换的道路边缘提取方法.将拍摄到的道路图像进行滤波预处理;利用自适应阈值分割法对处理后的图像进行分割,并采用数学形态学中的"腐蚀"运算检测边缘;利用Hough变换实现道路边缘的检测与定位.试验结果表明,此方法对复杂的道路环境具有较好的适应性.
【总页数】3页(P62-64)
【作者】乔洁;李京华;杨志荣
【作者单位】西北工业大学,西安,710072;西北工业大学,西安,710072;西北工业大学,西安,710072
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.基于能量场边缘提取和改进Hough变换的图像几何特征检测 [J], 姚英;许录平;方强
2.基于广义Hough变换的指纹图像边缘提取算法及实验研究 [J], 黎伟;商建东
3.一种基于3D激光雷达的实时道路边缘提取算法 [J], 李广敬;鲍泓;徐成
4.基于数学形态学与Hough变换的道路边缘提取 [J], 张凤珍;董增寿
5.基于改进Canny算法与Hough变换的轨道图像边缘提取 [J], 汤旻安;王晨雨因版权原因,仅展示原文概要,查看原文内容请购买。
基于Hough变换的高分辨率遥感影像道路提取方法研究
() 2 辐射特 征 : 道路 一般 有 两条 明显 的边 缘 , 内 其 部灰 度与其 相邻 区域 灰 度 反 差 比较 大 , 市 道 路 有护 城
光谱特 征 与形态 特征 , 计 了 一种 提 高 影像 分 割 有 效 设
性的交 互式道 路信 息 提取 方 法 , 出直 线段 匹配 的 方 提
有 的遥感 影像 道路 提取方 法可 分为 自动 和半 自动提取 两类 , 自动提取 方法 包括 道路 的 自动 定位 和理解 , 一般
法对 非道路 信 息进 行 去噪 处 理 , 运 用 H uh变 换 的 并 og
方法 检测 和提取 高分辨 率遥 感影 像上 的道 路 。
1 道 路 特 征 分 析 与 提 取 流 程
Y e g Y e J nY o u F n ’ uj i a i a
摘 要 高分辨 率遥 感影像 的道路提 取是 当前 研 究热 点之 一 , 于 Hog 基 u h变换 的 方 法可应 用 于提
取 高分 辨 率遥 感 影像上 的 直线段 道路 , 但仍 存在 一 定的局 限性‘ , 如对 影像 分割依 赖 性 大、 受非道 路 因素 影 响 大等 。在 分析 高分辨 率遥 感影像 上道路 光谱 特征 与 形 态特征 的基 础 上 , 计 了一种 交互式 信 息提 设
状 , 长度远 大于其 宽度 , 其 道路 的宽度 可 以识别 并且 变
道路 J但 仍存 在 一 定 的局 限性 , 对 影 像 分 割 依 赖 , 如
性大 、 受非 道路 因素影 响大 。为 克服 以上 两点不足 , 在
化 比较小 , 曲率 有一 定 的限制 。
前人研 究 的基础 上 , 分析 道 路 在 高分 辨 率 遥感 影 像 上
基于Hough变换的智能车辆车道线检测
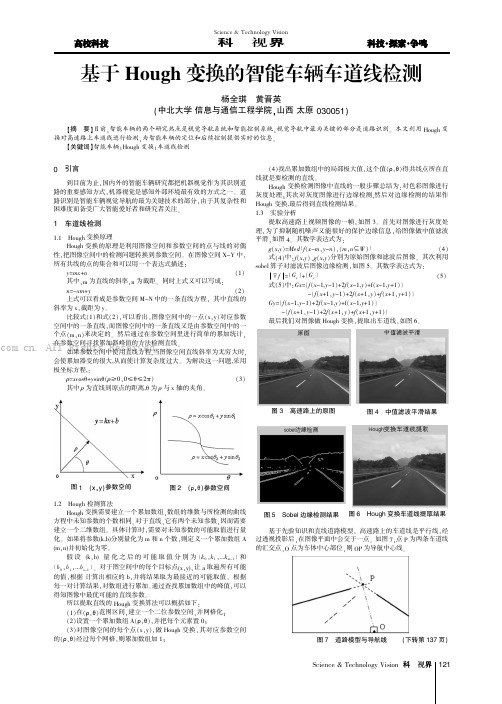
图6Hough变换车道线提取结果0引言到目前为止,国内外的智能车辆研究都把机器视觉作为其识别道路的重要感知方式,机器视觉是感知外部环境最有效的方式之一。
道路识别是智能车辆视觉导航的最为关键技术的部分,由于其复杂性和困难度而备受广大智能爱好者和研究者关注。
1车道线检测1.1Hough 变换原理Hough 变换的原理是利用图像空间和参数空间的点与线的对偶性,把图像空间中的检测问题转换到参数空间。
在图像空间X-Y 中,所有共线的点的集合和可以用一个表达式描述:y =mx +n (1)其中,m 为直线的斜率,n 为截距。
同时上式又可以写成:n =-xm +y (2)上式可以看成是参数空间M-N 中的一条直线方程,其中直线的斜率为x,截距为y。
比较式(1)和式(2),可以看出,图像空间中的一点(x,y)对应参数空间中的一条直线,而图像空间中的一条直线又是由参数空间中的一个点(m,n)来决定的。
然后通过在参数空间里进行简单的累加统计,在参数空间寻找累加器峰值的方法检测直线。
如果参数空间中使用直线方程,当图像空间直线斜率为无穷大时,会使累加器变的很大,从而使计算复杂度过大。
为解决这一问题,采用极坐标方程,:ρ=x cosθ+y sinθ(ρ≥0,0≤θ≤2π)(3)其中ρ为直线到原点的距离,θ为ρ与x 轴的夹角。
1.2Hough 检测算法Hough 变换需要建立一个累加数组,数组的维数与所检测的曲线方程中未知参数的个数相同。
对于直线,它有两个未知参数,因而需要建立一个二维数组。
具体计算时,需要对未知参数的可能取值进行量化。
如果将参数(k,b)分别量化为m 和n 个数,则定义一个累加数组A (m,n)并初始化为零。
假设(k,b)量化之后的可能取值分别为k 0,k 1,...k m -1{}和b 0,b 1,...b n -1{}。
对于图空间中的每个目标点(x,y),让a 取遍所有可能的值,根据计算出相应的b,并将结果取为最接近的可能取值。
结合Hough变换与运动估计的车道线提取方法

【 摘
要 】车道 线识 别是 安 全辅 助 驾驶 和智 能驾 驶 系统 的核 心研 究 内容 , 对 控 制危 险驾驶 和 疲 劳驾驶 均有 显著 的作 用 , 通常
2 . S c i e n t i ic f R e s e a r c h D e p a r t m e n t ,C h e n g d u U n i v e m i t y o f I n f o r ma t i o n T e c h n o l o g y ,C h e n g d u 6 1 0 2 2 5 ,C h i n a )
d a n g e r o u s d i r v i n g a nd d r i v e r f a t i g u e h a v e a s i g n i i f c a n t r o l e . Us u a l l y t h e Ho u g h t r ns a f o r m f o r l i n e d e t e c t i o n o f f a u l t - t o l e r a n c e a n d r o b u s t n e s s ,c a n b e t a k e n o n — b o a r d c a me r a f o r e f f e c t i v e d e t e c t i o n o f t h e l a n e .T h i s p a p e r c l e v e r l y c o mb i n e s t h e b l o c k e d Ho u g h t r a n s f o m a r n d mo t i o n e s t i ma t i o n o f t h e b l o c k ,g r e a t l y r e d u c e s t h e l a n e d e t e c t i o n a n d t r a c k i n g a lg o it r h m c o mp l e x i t y ,
采用Hough变换的道路边界检测算法

采 用 H uh变 换 的道 路 边界 检 测 算 法 og
史 晓鹏 , 为 , 力群 何 韩
( 北京 商 大学 计算机与信 息工程 学院, L 北京 10 8 00 ) 4
摘 要 : 基于计算机视觉 的路况信息识别是 当前智能交通领域 的热点课 题 , 道路边界 的检 测能够有效 去除路况 图 对
第 7卷第 1 期
21 0 2年 2月
智
能
系
统
学
报
V0 . № . 17 1 Fe 2 2 b. 01
CAAITr n a to s o n elg n y t ms a s cin 1 . 9 9 jis . 6 3 7 5 2 1 0 0 4 :0 3 6 / .sn 1 7 - 8 . 0 9 0 4 1
Absr c Tr f c i fr to ee to a e o ttp c i h e d o o u e iin a d i el e r n — t a t: af n omai n d t cin h s b c me a ho o i n t e f l fc mp t rvso n ntli ntta s i i g p rai n s se .Th ee to fte r a d e c n ef cie y r mo e a lr e a e ih h s n ti g t o wih o tto y tms e d t cin o h o d e g a fe tv l e v a g r a wh c a oh n o d t tafc i f r ain i r e o i r v e ltme ta c if r to e e to ro ma c .A o d e g ee to l r fi n o m to n o d rt mp o e r a -i r f n o main d t ci n pef r n e i r a d e d t cin a— g rt m o ta g t a d s r e tn o d s pr p s d. Hitg a e uaiain a d i r e me a in b Otu o ih f rsr ih n e p n i e r a s wa o o e so r m q lz to n bnay s g ntt y o s me h d we e u e o e ha c her a d ef aurs,wh l a le n r oo i a i a dg r d p — t o r s d t n n e t o d e g e t e ie a me n f tra d moph l g・ lb n r e e we e a o t i z y e o g trd o o s n b an f au e .Th ug r n fr wa e n d fe e ts c st ee tt e r a dg . d t e i fn ie a d o ti e t r s eHo h ta so m sus d i ifr n pa e o d t c h o d e e Ex ei ntlr s lsd mo sr t h tt e ra d e r e e td a c ae ya d t e r a r a wa x r ce fe - p rme a e u t e n ta et a h o d e g swe ed tc e c urt l n h o d a e se ta t d ef c t ey b h o o e t ds u r n e i h u s q e r ftafc i fr t n a s ri g i l y t e pr p s d meho ,g a a teng t e s b e u ntwo k o r f n o ma i s o tn . v i o Ke wo ds:o d e g ee to y r r a d e d t ci n;Otu me h d;Ho g r n fr ;i t l g n r ns o a in;c mp trv so s to u h ta so m n el e tta p r to i t o u e iin
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于Hough变换的道路边界提取方法摘要:本文利用 matlab7.0软件开发平台工具,采用hough变换等技术手段在图片上进行线性构造信息提取,为今后的研究部署工作提供参考。
但hough变换存在一定的局限性,如对影像分割依赖性大、受非道路因素影响大等。
本文首先利用道路种子点处的光谱信息进行道路区域的生长, 提取光谱信息一致的道路区域,得到一个包含道路信息的二值影像,然后对此二值影像进行滤波,在提取出的道路条状区域的基础上, 根据道路具有的形状特点,利用形态学进行细化和一定次数的形态修剪处理, 得到单像素宽的道路中心线信息。
最后对图像进行基于hough变换的线性特征提取,文章对高分辨率航空遥感影像进行了实验验证了该方法的有效性[1-3]。
关键词:线性特征提取,hough变换,matlaba road edge detection algorithm based on the hough transform qiu zhiweili yan(henan university of urban construction, pingdingshan 467036, china)aqiuzhiwei-2008@, bliyan0502@abstract: by using the road seed point spectrum information in this paper firstly, the relevant road information can be extracted from the spectral information consistent with the road area, road information including two value image can beacquired, and then this two value image filtered, in the extracted road strip on a regional basis according to the road shape characteristics, using morphological thinning and a certain number of form pruning treatment, a single pixel wide road center line information can be extracted. the last image based on hough transform linear feature extraction, the high resolution remote sensing image experiments were carried out to verify the validity of the method[1-3].key words: hough transformation, road edge detection项目来源:河南城建学院科学研究基金项目:利用d-insar技术研究城市沉陷监测及矿区环境影响评价分析。
项目编号:2013jzd008中图分类号:s731.8 文献标识码:a文章编号:1 前言随着遥感技术的发展, 航天飞机和各种卫星系统提供的遥感影像大量增加, 它们的空间分辨率、光谱分辨率不断提高, 为地理信息系统提供了丰富的基础信息数据源[4]。
如何有效地利用遥感影像进行道路提取, 已成为国内外遥感领域研究的热点, 它不仅是遥感领域的难题, 也是计算机视觉和图像理解研究的重点之一。
本文利用hough变换,根据遥感图像的特点,提出一种适合遥感影像道路检测的方法。
实验证明了该方法的可行性[5]。
2 图像分割算法概述2.1 区域生长法图像分割图像分割的目的是将图像划分为不同的区域,它是图像处理到图像分析的关键步骤, 在图像工程中占据重要的位置。
基于区域生长是以直接找寻区域为基础的分割技术。
区域生长是一种根据事先定义的准则将像素或子区域聚合成为更大的区域的过程。
基本方法是以一组“种子”点开始,将与种子点性质相似(诸如灰度级或衍射的特定范围)的相邻像素附加到生长区域的每个种子上,逐步生成具有某种均匀性的空间区域,将相邻的具有相似性质的像素或区域归并从而逐步增长区域,直至没有可以归并的点或其他小区域为止[6-7]。
为了综合运用道路的光谱特征及形态特征本文采用高分辨率遥感图像进行实验,如图2-1及2-2。
图 2-1 图2-2其区域生长分割结果如图2-3及2-4,符合判定条件的像素设为白,不符合的设为黑:图2-3图2-42.2 形态学细化在高分辨率遥感影像中,城市道路是有一定宽度的条形或矩形,道路的道路边界在具体描述道路时具有非常重要的意义,因此进一步对处理后的二值图像进行形态细化,一定次数的形态修剪得到最终道路网络中心线是有必要的。
需要说明的是, 由于初始分割后,影像中的道路信息的几何特征不是十分规整,在形态细化后道路信息中产生一些毛边,形态修剪旨在消除影像中道路网络信息上的毛边。
然而,由于实验影像数据中的道路信息存在众多细小支路信息,形态修剪处理将一些本来已被检测出的道路信息削减变短,因此, 针对具体情况,形态修剪操作可以斟酌使用[8-9]。
如图我们可以看到形态修剪得到最终道路网络中心线的效果:图2-3图2-4在上述操作基础上,进行hough变换检测道路,效果如图所示:图2-5图2-62. 3 hough 变换检测道路hough变换是最常用的直线提取方法。
他的基本思想是:将直线上每一个数据点变换为参数平面中的一条直线或曲线,利用共线的数据点对应的参数曲线相交于参数空间中一点的关系,使直线的提取问题转化为计数问题。
具体地说hough变换的基本思想是利用点-线的对偶性,即图像空间共线的点对应在参数空间里相交的线,反过来,在参数空间中交与同一个点的所有直线在图像空间里都有共线的点与之对应[10]。
在图像空间x-y中,所有共线的点(x,y)都可以用直线方程描述为:式(3.1)其中m为直线的斜率,c为截距,同时式(3.1)又可以改写为:式(3.2)上式可看做是参数空间c-m中的一条直线方程,其中直线的斜率为x,截距为y。
但如果直线的斜率无限大(比如x=a形式的直线),采用式(3.2)是无法完成检测的,为了能够正确识别和检测任意方向的和任意位置的直线,可以用duda和hart提出的直线极坐标方程来替代(3.1)式:式(3.3)如图3.3(a)所示,图像空间中一条直线l,为l过原点的垂线与x轴正方向的夹角,为原点到z的距离。
这时参数空间就变为空间,x-y空间中的任意一条直线对应了空间内的一个点,由式(3.3)可知,x-y空间内的一点对应了空间中的一条正弦曲线。
如果有一组位于由参数和决定的直线上的点,则每个点对应了参数空间中的一条正弦曲线,所有这些曲线必交于点,如图2-7所示:(a)图像中位于同一直线上的点 (b)参数空间中交于一点的正弦曲线图2-7 极坐标方程下的点一线对偶示意图因此图像空间中共线的点与参数空间中共点的线存在对应关系,只要找出参数空间中共点的直线(曲线),就能确定图像空间中的直线。
3 结束语由图可以看出, 本文运用的hough变换方法比较好的提取了道路网络信息,特别是在提取影像中道路细节信息上很有优势。
通过目视解译,发现处理结果中仍存在着一些漏判和误判。
这主要是由于在运用hough变换方法时在一定程度上依赖于初始影像分割及去噪结果, 对预处理后的影像中道路的形状变化比较敏感。
针对本文中方法的不足,可以在预处理过程中加以优化, 利用更加高效的方法对影像进行分割及去噪处理[11-12]。
参考文献[1] 石辛民,郝整清.模糊控制及其matlab仿真[m].北京:清华大学出版社,北京交通大学出版社,008 :93—117.[2] 易玲.基于分级的快速度霍夫变换直线检测[j].微计算机信息2007, 3(1):406—408.[3] 谢凤英,姜志国,秦世引.对偶空间上的高分辨率遥感影道路提取[j].宇航学报,2006,27(5):1034-1038.[4] 吕健刚,韦春桃.基于hough变换的高分辨率遥感影像城市直线道路提取[j].遥感应用,2009(3):15-18.[5] 夏春林,张静,褚廷有.基于高分辨率的城区遥感影像道路半自动提取方法研究[j].测绘科学,2008,33(5):140-143.[6]张铮,王艳萍,薛桂香.数字图像处理与机器视觉[m].北京:人民邮电出版社, 2010.[7]celik t,ma puter vision based fire detection in color images[j].patternrecognition,2008,34(12) :258-263.[8]刘红霞.图像分割算法的研究与实现[d].上海:华东师范大学,2004.[9] 刘清,林土胜.数学形态学的边缘检测算法研究[j].计算机工程与应用, 2008,44(35) :188 - 193.[10] 刘元朋,张定华,桂元坤,等.用带约束的最小二乘法拟合平面圆曲线[j].计算机辅助设计与图形学学报,2004,16 (10) :1382- 1385[11] aptoula e,lefevre s.on lexicographical ordering in mult-ivariatem athem at icalm orphology[j].pattern recogn it ion letters,2008,29(2) :109- 118.[12]邓亚娟,杨云峰,马荣国.基于复杂网络理论的公路网结构特征[j].中国公路学报,2010,23(1) :38-104。