第十一章-简单机械和功--基本知识点
人教版八年级第十一章功和机械能知识点

第十一章功和机械能第一节功(一)功1、做功的两个必要因素: (1)作用在物体上的力;(2)物体在力的方向上通过的距离.2、不做功的三种情况:(1)有力无距离:“劳而无功”之一,如搬石头未搬动;(2)有力,也有距离,但力的方向和距离垂直:“劳而无功"之二,如手提水桶在水平面上走动。
(3)有距离无力:(“不劳无功”),如物体在光滑平面上自由滑动,足球踢一脚后运动;3、功的计算:物体上的力与力的方向上通过距离的乘积.公式W=FS=Pt各量单位-W:J(焦耳)F:N(牛顿) S:m(米)P:W(瓦特) t:s(秒)4、国际单位:将N·m称为焦耳简称焦,符号(J) 1J=1 N·m把一个鸡蛋举高1m ,做的功大约是0.5 J .5、公式应用注意:①分清哪个力对物体做功,计算时F就是这个力;②公式中的S 一定是在力的方向上通过的距离,且与力对应.③功的单位“焦"(1牛·米 = 1焦).6、常见的功: 克服重力做功:W=Gh克服阻力(摩擦力)做功:W=fs(二)功的原理:使用任何机械都不省功1、内容:使用机械时,人们所做的功,都不会少于直接用手所做的功.2、说明:①功的原理对于任何机械都适用。
②使用机械要省力必须费距离,要省距离必须费力,既省力又省距离的机械是没有的。
③使用机械虽然不能省功,但人类仍然使用,是因为使用机械或者可以省力、或者可以省距离、也可以改变力的方向,给人类工作带来很多方便。
④对于理想机械(忽略摩擦和机械本身的重力):人做的功(FS)= 直接用手对重物所做的功(Gh)3、应用:斜面①理想斜面:斜面光滑(不计摩擦)②理想斜面遵从功的原理③理想斜面公式:FL=Gh其中—F:沿斜面方向的推力;L:斜面长;G:物重;h:斜面高度④实际斜面:斜面粗糙(考虑摩擦)若斜面与物体间的摩擦为f ,则:FL=fL+Gh;这样F做功FL就大于直接对物体做功Gh 。
苏科版初中物理《第11章-简单机械和功》知识梳理

苏科版九年级物理《第十一章简单机械和功》知识梳理简单机械{杠杆类----杠杆、滑轮、轮轴;斜面类---斜面、劈、螺旋。
1.杠杆A. 概念a.杠杆的定义:一根硬棒在力的作用下能绕固定点转动,这根硬棒叫做杠杆.杠杆可以是直的,也可以是弯的.b.支点:杠杆绕着转动的点叫做支点,用O表示.c.动力:使杠杆转动的力叫做动力,用F1表示.d.阻力:阻碍杠杆转动的力叫做阻力,用F2表示.动力和阻力是相对的,如利用杆秤称物体时,就无法确定哪个力为动力,哪个力为阻力,此时可以人为规定.e.力的作用线:过力的作用点沿力的方向所引的一条直线叫做力的作用线.力的作用线用虚线表示.f.动力臂:从支点到动力作用线的垂直距离,叫做动力臂.用L1表示.g.阻力臂:从支点到阻力作用线的垂直距离,叫做阻力臂.用L2表示.力臂可能在杠杆上,也可能不在杠杆上.当力的作用线通过支点时,该力的力臂为零,该力对杠杆的转动没有影响.B作力臂的程序先找出支点,再作力的作用线,然后从支点作力的作用线的垂线.C杠杆的平衡条件a.杠杆平衡:杠杆静止不转或者匀速转动都叫做杠杆平衡.b.力矩i.物理意义:力矩是度量力对物体产生转动效应的物理量.ii.定义:力和力臂的乘积叫做力对支点的力矩.力矩用字母M表示,M=FL.iii.单位:牛〃米(N〃m)iV.分类:根据力的作用效果,分为顺时针力矩和逆时针力矩两种.C.杠杆平衡的条件(杠杆原理);动力乘以动力臂等于阻力乘以阻力臂,即:动力矩=阻力矩.数学表达式:F l L1=F2L2,即M动=M阻.说明:i.在使用公式时,公式等号两边相同物理量的单位要一致.ii.若动力矩和阻力矩不止一个时,杠杆的平衡条件可扩展为:顺时针的力矩之和等于逆时针的力矩之和.用公式表示为:∑M 顺=∑M 逆.D .杠杆的分类杠杆:等臂杠杆、不等臂杠杆(省力杠杆和费力杠杆)杠杆原理若用比例式表示,可以写成:1221l l F F = 上式表明,杠杆平衡时L 1是L 2的几倍,F l 就是F 2的几分之一.i .等臂杠杆(L 1=L 2,F l =F 2)常见的有:定滑轮、天平的横梁等.ii .省力杠杆(L 1>L 2,F l <F 2)常见的有:撬棒、铡刀、羊角锤、道钉撬、手推车、行李车、钢丝钳、核桃钳、铁匠剪刀、抽水机的柄、开瓶盖的起子等.利用省力杠杆可以省力,但要多移动距离.iii .费力杠杆(L 1<L 2,F l >F 2)常见的有:铁锹、铲车、镊子、火钳、筷子、笤帚、船桨、钓鱼杆、汽车吊、理发剪刀、人的前臂、缝纫机的踏脚板等.利用费力杠杆虽然费力,但可以省距离.在日常生活中不少器具是由多种杠杆组合起来的,如指甲剪、垃圾桶等器具上既有省力杠杆,又有费力杠杆.E 测量物体质量的工具i .天平 天平的横梁是一根等臂杠杆.用天平称物体质量时,移动游码相当于向天平右盘中加小砝码,因此横梁平衡时m 物=m 砝+m 游.ii .杆秤、案秤、台秤和磅秤,它们都不是等臂杠杆,因此利用它们可以称量质量比秤砣(或槽码)的质量大得多的物体的质量.F .最小动力问题由F l L 1=F 2L 2可得:1221l l F F =. 上式表明,杠杆平衡时,若F 2L 2一定,则L 2最大时,F l 最小. 据几何知识可知:i .若已知支点和动力作用点,则这两点之间的线段是最大的动力臂.ii .对于圆轮,若支点和动力作用点均在圆周上,则直径是最大的动力臂.有些较复杂的最小动力问题,还需利用数学上其他的一些极值知识来求解.2.滑轮和滑轮组A.滑轮周边有槽,能绕轴心转动的圆轮叫做滑轮.滑轮:定滑轮——工作时轴心不随重物一起移动的滑轮.动滑轮——工作时轴心随重物一起移动的滑轮.i.定滑轮定滑轮实质上是一个等臂杠杆.使用定滑轮不省力,但可以改变施力的方向.ii.动滑轮通常使用的动滑轮实质上是一个动力臂为阻力臂二倍的省力杠杆.使用动滑轮可以省一半力,但不能改变施力的方向.B滑轮组定滑轮和动滑轮的组合叫做滑轮组.使用滑轮组可以省力,可以省距离,可以改变施力的方向,但不可以同时既省力、又省距离.滑轮组的省力情况,通常采用隔离法和整体法结合起来分析.即先将动滑轮和重物从整个系统中隔离出来作为一个整体,再全面分析该整体的受力情况,然后据力的平衡条件即可得出动力和阻力大小之间的关系.3.轮轴由轮和轴组成、能绕共同轴线旋转的简单机械,叫做轮轴.轮轴实质是可以连续旋转的杠杆.i.当动力作用在轮上,阻力作用在轴上时,使用轮轴省力,但要多移动距离.常见的有:辘轳、手摇卷扬机、汽车驾驶盘、自行车的龙头、拧螺丝的板手、拧螺丝钉的螺丝刀、自行车上的龙头和前叉、脚踏板和大齿轮组成的轮轴等.ii.当动力作用在轴上,阻力作用在轮上时,使用轮轴费力,但可少移动距离.如自行车上的飞轮和后轮组成的轮轴等.在现代工农业生产中,很多机械和机器是由多种简单机械组合起来的,如差动滑轮就是由轮轴和动滑轮组合起来的,起重机就是由杠杆和滑轮组组合起来的.4.机械功A.定义物理学中把力和物体在力的方向上移动距离的乘积叫做机械功,简称功.B.做功的两个必要因素作用在物体上的力和物体在力的方向上通过的距离.C 定义式和决定式W=Fs功是一个过程量.D .单位在国际单位制中,功的单位是焦耳,简称焦,符号为J .1 J=1 N〃mE 说明i .力与运动方向相反时,力对物体做负功.ii .力与运动方向不一致时,可利用力的分解和三角函数的知识计算功.iii .力的大小和方向在变化时,可采用分段处理(力变化的阶段取力的平均值)以及等效处理(根据是机械功原理、功能原理)等方法来计算功.5.功率A.物理意义功率是表示物体做功快慢的物理量.B.定义单位时间里完成的功叫做功率.C 定义式和决定式tW pD .单位 在国际单位制中,功率的单位是瓦特,简称瓦,符号是W .1 W=1 J /s1 kW=103 W l MW=106 WE 推导式P=Fv式中的v 表示物体在力F 方向上移动的速度,若可为即时速度,则P 为即时功率;若v 为平均速度,则P 为平均功率.由P=Fv 得:F=P/v ,此式表明:当P 一定时,F 与v 成反比.F .配套功率动力机的功率要略大于工作机的功率.6.机械功原理(功的原理)A.文字表述利用任何机械做功时,动力对机械所做的功(W1),等于机械克服所有阻力所做的功(W2).即利用任何机械都不能省功.B .公式W 1=W 2C .斜面及斜面类简单机械斜面是一种常见的简单机械.设斜面长为L 、高为h 、物重为G ,使物体沿斜面匀速向上移动的动力为F ,若不考虑物体与斜面的摩擦,则在物体从斜面底端匀速移动到顶端的过程中,据功的原理W l =W 2有:FL=GhF=hG/L因为h<L ,所以F<G ,即利用斜面可以省力.对同样高的斜面,斜面越长越省力,但也要多移动距离.劈是斜面类简单机械.设人用水平力F 将劈推过距离s 时,物重为G 的物体被举高h .若不考虑摩擦和支架的自重,则据功的原理W 1=W 2有:Gh FS = G sh F =因为h<s ,所以F<G ,即利用劈可以省力. 螺旋也是斜面类简单机械.利用螺旋举起重物时,若用h 表示螺纹的螺距,用L 表示螺旋把手的末端到螺旋轴线的长,用F 表示作用在把手末端的力,用G 表示物重,若不考虑摩擦,则在把手绕螺旋轴线匀速转动一周的过程中,据功的原理W l =W 2有:Gh l F =⋅π2 F h F π2=由于h 比2πL 小得多,所以F 就比G 小得多,即利用螺旋可以省力. 7.机械效率A. 物理意义 机械效率是表示机械做功性能优劣的物理量.B.定义使用机械做功时,有用功跟总功的比值,叫做机械效率.=动力对机械所做的功.W 有用=机械对物体的拉力所做的功.W 额外=机械克服自重、绳重和内部摩擦所做的功.据机械功原理:W 总= W 有用+ W 额外推导式:P 输入= P 输出+ P 额外C.定义式%100⨯=总有用W w η %100⨯=输入输出W w η D .推导式 %100⨯=总有用p p η %100⨯=输入输出p p η 机械效率是一个过程量.E 说明 i .机械效率是一个比值,没有单位.ii .任何机械的效率在实际情况下都小于1.iii .机械效率的高低,既跟机械本身结构(内部因素)有关,也跟被拉动的物体(外部因素)有关.F .推论i .利用同一滑轮组匀速提升重物时,若不计绳重和滑轮与轴之间的摩擦,则物动G G +=11η,η随G 物的增加而增大ii .当把各种机械组合起来使用时,若每个机械的效率分别为η1、η2、……ηn ,则整个装置的效率η总=η1×η2×……×ηn ,组合机械越复杂,总效率就越低.。
八年级物理下册第十一章功和机械能一功知识点汇总新人教版(最新整理)
一、功1、功(1)力学中的功:如果一个力作用在物体上,物体在这个力的方向移动了一段距离,这个力的作用就显示出成效,力学里就说这个力做了功。
(2)功的两个因素:一个是作用在物体上的力,另一个是物体在这个力的方向上通过的距离。
两因素缺一不可.(3)不做功的三种情况:①有力无距离;②有距离无力;③有力有距离,但是力垂直距离。
2、功的计算(1)计算公式:物理学中,功等于力与力的方向上移动的距离的乘积.即:W=Fs。
(2)符号的意义及单位:W表示功,单位是焦耳(J),1J=1N·m;F表示力,单位是牛顿(N);s表示距离,单位是米(m)。
(3)计算时应注意的事项:①分清是哪个力对物体做功,即明确公式中的F。
②公式中的“s”是在力F的方向上通过的距离,必须与“F”对应。
③F、s的单位分别是N、m,得出的功的单位才是J.尊敬的读者:本文由我和我的同事在百忙中收集整编出来,本文档在发布之前我们对内容进行仔细校对,但是难免会有不尽如人意之处,如有疏漏之处请指正,希望本文能为您解开疑惑,引发思考。
文中部分文字受到网友的关怀和支持,在此表示感谢!在往后的日子希望与大家共同进步,成长。
This article is collected and compiled by my colleagues and I in our busy schedule. We proofread the content carefully before the release of this article, but it is inevitable that there will be some unsatisfactory points. If there are omissions, please correct them. I hope this article can solve your doubts and arouse your thinking. Part of the text by the user's care and support, thank you here! I hope to make progress and grow with you in the future.。
苏教版《简单机械和功》知识点归纳
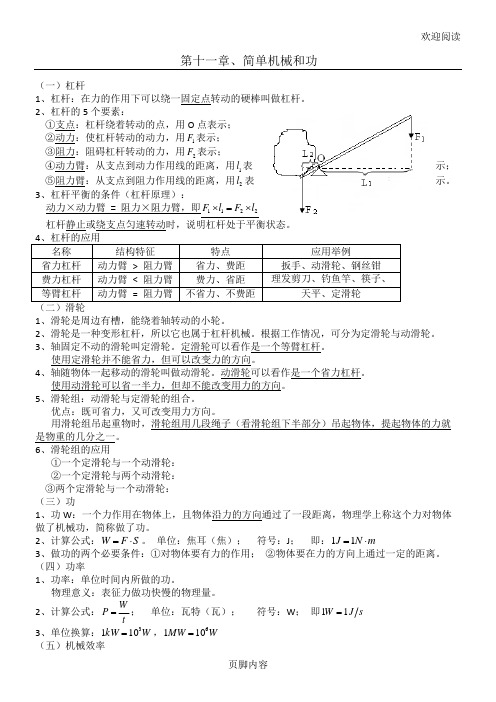
欢迎阅读页脚内容第十一章、简单机械和功(一)杠杆1、杠杆:在力的作用下可以绕一固定点转动的硬棒叫做杠杆。
2、杠杆的5个要素:①支点:杠杆绕着转动的点,用O 点表示;②动力:使杠杆转动的动力,用1F 表示;③阻力:阻碍杠杆转动的力,用2F 表示;④动力臂:从支点到动力作用线的距离,用1l 表示; ⑤阻力臂:从支点到阻力作用线的距离,用2l 表示。
3、杠杆平衡的条件(杠杆原理):动力×动力臂 = 阻力×阻力臂,即2211l F l F ⨯=⨯杠杆静止或绕支点匀速转动时,说明杠杆处于平衡状态。
4、杠杆的应用名称 结构特征 特点 应用举例省力杠杆 动力臂 > 阻力臂 省力、费距 扳手、动滑轮、钢丝钳费力杠杆 动力臂 < 阻力臂 费力、省距理发剪刀、钓鱼竿、筷子、船桨 等臂杠杆 动力臂 = 阻力臂 不省力、不费距 天平、定滑轮(二)滑轮1、滑轮是周边有槽,能绕着轴转动的小轮。
2、滑轮是一种变形杠杆,所以它也属于杠杆机械。
根据工作情况,可分为定滑轮与动滑轮。
3、轴固定不动的滑轮叫定滑轮。
定滑轮可以看作是一个等臂杠杆。
使用定滑轮并不能省力,但可以改变力的方向。
4、轴随物体一起移动的滑轮叫做动滑轮。
动滑轮可以看作是一个省力杠杆。
使用动滑轮可以省一半力,但却不能改变用力的方向。
5、滑轮组:动滑轮与定滑轮的组合。
优点:既可省力,又可改变用力方向。
用滑轮组吊起重物时,滑轮组用几段绳子(看滑轮组下半部分)吊起物体,提起物体的力就是物重的几分之一。
6、滑轮组的应用①一个定滑轮与一个动滑轮:②一个定滑轮与两个动滑轮:③两个定滑轮与一个动滑轮:(三)功1、功W :一个力作用在物体上,且物体沿力的方向通过了一段距离,物理学上称这个力对物体做了机械功,简称做了功。
2、计算公式:S F W ⋅=。
单位:焦耳(焦); 符号:J ; 即:m N J ⋅=113、做功的两个必要条件:①对物体要有力的作用; ②物体要在力的方向上通过一定的距离。
简单机械和功知识点
第11章 简单机械和功知识点总结一、认识和利用杠杆1、 杠杆(1) 杠杆的定义:在力的作用下能绕固定点转动的硬棒。
(2) 影响杠杆的五要素:支点:杠杆绕着转动的固定点; 动力:使杠杆转动的力F1; 阻力:阻碍杠杆转动的力F2;动力臂:从支点到动力作用线的距离1l ; 阻力臂:从支点到阻力作用线的距离2l ; (方法提示:一找点;二画线;三作垂线段)2、 杠杆的平衡条件(1) 杠杆的平衡:杠杆处于静止或匀速转动状态(2) 杠杆平衡条件:动力×动力臂=阻力×阻力臂,即F11l = F22l或:动力臂是阻力臂的几倍,动力就是阻力的几分之一。
即力与力臂成反比。
2112F F l l = 3、 三种杠杆及应用举例:(1) 省力杠杆:当1l >2l 时,F1<F2。
例:扳手,撬棍,指甲刀。
(2) 费力杠杆:当1l <2l 时,F1>F2。
例:钓鱼杆,船桨。
(3) 等臂杠杆:当1l =2l 时,F1=F2。
例:天平 4、不等臂天平的使用:物左砝右时质量为m 1,物右砝左时质量为m 2,则物体质量为m=21m m ,天平两边力臂之比为2121m m l l = 5、欲使已平衡的杠杆在改变力或力臂后再次平衡,则应有改变后的两侧的力与力臂的乘积相等,或者是两边的力或力臂同时改变相同的倍数。
(不是相同的大小)6、杠杆两端挂同种金属块平衡后,同时没入水中,杠杆仍然平衡;若挂不同种金属块,则杠杆失去平衡,密度较大的一端下沉。
二、认识和利用滑轮1、认识滑轮和滑轮组实质力的关系(F,G)距离关系(s,h)速度关系(v,0v)作用定滑轮等臂杠杆F=G s=h v=0v改变力的方向,既不省力也不省距离动滑轮动力臂是阻力臂两倍的杠杆F=12G s=2h v=20v省一半力,费距离滑轮组F=1nG s=nh v=n0v既可省力又能改变力的方向费距离(忽略摩擦,G=G物+G动滑轮)2、滑轮组用力情况的判断判断用力情况的关键是弄清几段绳子承担动滑轮和重物,在数绳子时,不但要明确绳子是否承担动滑轮和重物的重力,还要看清滑轮组的组装方式,不能只看滑轮个数。
九年级物理第十一章简单机械和功知识点
第十一章简单机械和功是九年级物理中的重要章节,主要讲解了简单机械和功的知识。
简单机械是机械原理的基础,掌握了简单机械的原理,可以应用到日常生活和工作中。
功是物理学的重要概念,是描述力在物体上所做的功的大小和方向的物理量。
下面是关于第十一章简单机械和功知识点的详细介绍:一、简单机械的定义和分类1.简单机械的定义:指只有一个能够转动的零件,或只有一个能够运动的零件,或只有一个能够变形的零件的机械。
2.简单机械的分类:按机械原理可分为杠杆、轮轴和滑轮;按作用方向可分为斜面、楔子和螺旋。
-杠杆原理:杠杆原理是指利用杠杆的杠杆效应来改变力的作用效果的原理。
-轮轴原理:轮轴原理是指利用轮轴的转动将力转化成力矩的原理。
-滑轮原理:滑轮原理是指利用滑轮的滑动来改变力的方向的原理。
-斜面原理:斜面原理是指利用斜面的倾斜度来减少物体所受的力的原理。
-楔子原理:楔子原理是指利用楔子形状将力分成两个方向作用的原理。
-螺旋原理:螺旋原理是指利用螺旋的升降来改变力的作用效果的原理。
二、杠杆的原理1.杠杆原理的定义:杠杆原理是指利用杠杆的杠杆效应来改变力的作用效果。
2.杠杆的分类:按支点和作用力的位置关系可分为一级杠杆、二级杠杆和三级杠杆。
-一级杠杆:支点位于力的一侧。
-二级杠杆:支点位于力的一侧,但力和支点之间还存在一个力臂和另一个力臂。
-三级杠杆:支点位于力的中间。
3.杠杆的原理公式:杠杆的原理公式为力1×力臂1=力2×力臂2,也可写作F1×d1=F2×d2三、轮轴的原理1.轮轴的原理的定义:轮轴原理是指利用轮轴的转动将力转化成力矩的原理。
2.门弯钉原理:门弯钉原理是指在开门情况下,门的拉力被转化为弯钉的转动力矩。
3.原理公式:力×作用臂=力矩。
四、滑轮的原理1.滑轮的原理定义:滑轮原理是指利用滑轮的滑动来改变力的方向的原理。
2.滑轮的分类:滑轮可分为固定滑轮和移动滑轮两种。
初中物理第十一章功和机械能知识点复习

初中物理第十一章功和机械能知识点复习一、功的概念1.功的定义:当物体受力沿着其运动方向移动时,力对物体做功。
功是力和位移的乘积。
2.两个重要公式:- 功的计算公式:$W = F \cdot s \cdot \cos \theta$,其中W代表功,F代表力的大小,s代表位移的长度,$\theta$代表力和位移之间的夹角。
-功的单位:焦耳(J),1焦耳等于1牛顿乘以1米。
3.正负功:-正功:当力和物体的位移同向时,所做的功为正功。
例如:将书推进桌面或人行驶等。
-负功:当力和物体的位移反向时,所做的功为负功。
例如:将书拉离桌面或摩擦力做负功等。
二、功率的概念1.功率的定义:物体单位时间内做功的多少。
功率等于单位时间内的功除以时间。
2.两个重要公式:- 功率的计算公式:$P = \frac{W}{t}$,其中P代表功率,W代表做的功,t代表时间。
-功率的单位:瓦特(W),1瓦特等于每秒做1焦耳的功。
3.功率的物理意义:功率越大,表示单位时间内所做的功越多,工作效率越高。
三、机械能和能量守恒定律1.机械能的概念:物体的机械能等于其动能和势能之和。
物体的机械能是它在运动(动能)和位置(势能)中所具有的能量。
2.动能和势能:-动能:物体由于运动而具有的能量。
动能与物体的质量和速度有关,动能越大,速度越大,质量越大,动能越大。
-势能:物体由于位置而具有的能量。
根据物体所在的位置,势能可以分为重力势能、弹性势能和化学势能等。
3.能量守恒定律:封闭系统内的机械能总量在运动过程中保持不变。
-机械能守恒公式:$E_1=E_2$,即物体在一个过程中的初机械能等于它的末机械能。
-可以通过利用机械能守恒公式解决一些与机械能相关的问题,如小球自由落体、摆锤的运动等。
四、简单机械1.机械优势:通过利用机械的作用,使工作上的力和负载的关系发生改变,提高工作效率。
2.六种常见的简单机械:-杠杆:杠杆有三类,根据杠杆的支点位置不同,分为一类杠杆、二类杠杆和三类杠杆。
11《简单机械和功》知识总结
《简单机械和功》知识总结一、杠杆 1、基础知识杠杆:绕着固定点转动的硬棒。
支点:杠杆绕着转动的固定点,用O 表示。
动力:使杠杆转动的力,用F 1表示。
阻力:阻碍杠杆转动的力,用F 2表示。
动力臂:支点到动力作用线的距离,用L 1表示。
阻力臂:支点到阻力作用线的距离,用L 2表示。
杠杆平衡:杠杆在动力和阻力的作用下静止或匀速转动。
2、杠杆平衡的条件:动力×动力臂=阻力×阻力臂 即:F 1L 1=F 2L 2,可变形为:F 1:F 2=L 1:L 23、做关于杠杆题时的注意事项: (1)必须先找出并确定支点(2)对力进行分析,从而确定动力和阻力(3)找出动力和阻力的作用线,确定动力臂和阻力臂。
5、轮轴:由有共同转动轴的大轮和小轮组成,习惯上把大轮叫轮,小轮叫轴。
轮轴是杠杆的变形。
用R 表示轮半径,用r 表示轴半径,由杠杆的平衡条件知,F 1R=F 2r ,因为R>r ,所以作用在轮上的力F 1总是小于轴上的力F 2。
4、斜面:斜面也是一种简单机械,当需要将重物沿竖直方向上提时,利用斜面比直接向上提要省力,当不计摩擦力时,有:G F =S h(其中h 是斜面的高度,S 是斜面的长度)。
①理想斜面:斜面光滑; ②理想斜面遵从功的原理;③理想斜面公式:FL=Gh ,其中:F :沿斜面方向的推力;L :斜面长;G :物重;h :斜面高度。
如果斜面与物体间的摩擦为f ,则:FL=fL+Gh ;这样F 做功就大于直接对物体做功Gh 。
三、功1、功:如果对物体用了力,并使物体沿力的方向移动了一段距离,我们就说这个力对物体做了机械功,简称功。
2、功的两个要素:力和沿力的方向通过的距离。
3、功的大小:功等于作用力跟物体沿力的方向通过的距离的乘积。
功的公式:W=Fs;单位F→牛顿;s→米;W表示功,单位:牛·米(N·m),叫做焦耳,简称焦(J)。
1J=1N·m。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
11.1杠杆
一、杠杆
1.定义:在物理学中,将一根在力的作用下可绕一固定点转动的硬棒称做杠杆。
2.五要素:支点(O)——杠杆绕着转动的点。
动力(F1)——使杠杆转动的力。
阻力(F2)——阻碍杠杆转动的力。
动力臂(L1)——从支点到动力作用线的垂直距离。
阻力臂(L2)——从支点到阻力作用线的垂直距离。
注意:⑴力臂——从支点到力的作用线的垂直距离。
⑵力臂作图的步骤:①找支点②找力的作用线③作点到线的垂直距离④标明力臂名称。
二、杠杆的平衡条件
1.探究杠杆的平衡条件
⑴杠杆处于平衡状态的情况:①静止状态②匀速转动
⑵调节杠杆在水平位置平衡的方法:调节杠杆两端的平衡螺母(左高向左,右高向右调,两边平衡螺姆调节方向一至。
)
⑶调节杠杆在水平位置平衡的目的:①便于测量力臂②克服杠杆自重的影响
⑷实验记录表:
⑸杠杆的平衡条件:动力×动力臂﹦阻力×阻力臂
数学表达式:F1 L1﹦F2 L2
⑹杠杆的平衡条件也称为杠杆原理,最早是由古希腊学者阿基米德总结出来的。
2.杠杆的分类:
⑴省力杠杆:①特点:动力臂大于阻力臂
②优点:省力
③缺点:费距离
④例如:羊角锤、手推车、剪铁皮的剪刀、老虎钳、撬棒等
⑵费力杠杆:①特点:动力臂小于阻力臂
②优点:省距离
③缺点:费力
④例如:筷子、镊子、笤帚、船桨、裁衣剪刀、钓鱼竿、理发的剪刀等
⑶等臂杠杆:①特点:动力臂等于阻力臂
②优点:既不省力也不省距离
③例如:托盘天平、定滑轮等
11.2滑轮
一、定滑轮
1.定义:使用滑轮时,轴的位置固定不动的滑轮,称为定滑轮。
2.实质:等臂杠杆
3.结构示意图:
4.探究使用定滑轮的特点 ⑴实验记录表
⑵定滑轮的特点:①使用定滑轮不能省力;
②使用定滑轮可以改变用力的方向; ③使用定滑轮可以改变拉力的方向,但不能改变拉力的大小(拉力的大小保持不变)。
二、动滑轮
1.动义:使用滑轮时,轴的位置随被拉物体一起运动的滑轮,称为动滑轮。
2.实质:动力臂是阻力臂两倍的杠杆
3.结构示意图:
4.探究使用动滑轮的特点 ⑴实验记录表
⑵动滑轮的特点:①使用动滑轮能省一半力;
②使用动滑轮不能改变用力的方向。
三、滑轮组
1.定义:将定滑轮和动滑轮组合起来使用称为滑轮组。
2.作用:滑轮组既可以省力又可以改变用力的方向。
3.力的关系:用滑轮组起吊重物时,滑轮组用几段绳子吊物体,提起物体的力就是物重的几
分之一。
注:①不计动滑轮重、绳重和摩擦的情况下(理想情况)F=G/n
②不计绳重和摩擦的情况下(只考虑动滑轮的自重)F =(G +G 动)/n 4.距离的关系:S=nh
实验序号 钩码所受的重力G/N 弹簧测力计的示数F/N
①
② ③ 实验序号 钩码所受的重力G/N 弹簧测力计的示数F/N
①
② ③
5.速度的关系:V=nV物
6.滑轮组的绕法:奇动偶定
注:n为奇数时,从动滑轮开始;n为偶数时,从定滑轮开始。
四、轮轴和斜面
1.轮轴由具有公共转轴的轮和轴组成,轮轴也以看成是杠杆的变形,且是一种能省力的杠杆。
轮轴的实例:门把手、汽车方向盘、扳手等。
2.斜面也是一种简单机械,也可以看成是杠杆的变形,且是一种能省力的杠杆。
斜面的实例:供轮椅通行的斜坡、盘山公路等。
11.3功
一、探究斜面
1.实验需测量的物理量:拉力的大小F、小车通过的距离S
小车的重力G、小车上升的高度h
2.
测量序号F/N S/m G/N h/m Fs(N·m) Gh/(N·m)
①
②
③
3.实验现象:Fs与Gh近似相等
4.实验表明:如不考虑摩擦等阻力的影响,使用其他任何机械也可以得到与使用斜面时相似的结论,即没有既省力又省距离的机械。
(使用任何机械都不能省功。
)
二、功(符号:W)
1.定义:力与物体在力的方向上通过的距离的乘积,称为机械功,简称功。
2.公式:功=力×距离(W=Fs)
3.单位:在国际单位制中,功的单位是牛·米(N·m)。
为纪念英国物理学家焦耳,将功的
单位命名为焦耳,简称焦,用字母J表示。
(1J=1 N·m)
4.根据功的公式,对物体做功有两个必要条件:一是对物体要有力的作用,二是物体要在力的方向上通过一定的距离。
5.没有做功的三种情况:
①有力没有距离,例如:虽然司机费了九牛二虎之力,汽车还是纹丝不动。
②有距离没有力,例如:运动员踢了足球一下,球在草地上滚动了一段距离。
③有力有距离但不在同一方向上,例如:学生背着书包在水平路面上匀速前进。
11.4功率
一、功率(符号:P)——功率是表示物体做功快慢的物理量。
1.定义:单位时间内所做的功叫做功率。
2.公式:功率=功/时间(P=W/t)变形后可求W=Pt推导公式还有P=Fv
3.在国际单位制中,功率的单位是焦/秒(J/s)。
为纪念英国工程师、发明家瓦特,将功率的单位命名为瓦特,简称瓦,用字母W表示。
(1W=1J/s)
例如:人平时骑自行车的功率约为60—80W。
表示的物理意义:人骑自行车每秒做功60—80焦耳。
4.在工程技术中,常用千瓦(KW)、兆瓦(MW)等作为功率的单位。
1KW=1000W 1MW=1000KW
5.马力是曾使用过的一种功率的单位,1马力等于735瓦。
二、活动11.6估测上楼时的功率
1.需测量的物理量:人的质量m、上楼的竖直高度h、上楼的时间t
2.测量工具:磅秤(或体重秤测人的重力G)、皮卷尺、秒表
3.
4.功率表达式:P=mgh/t
11.5机械效率
一、活动11.7 再探动滑轮
1.需测量的物理量:绳受到的拉力F、手移动的距离S、
钩码受到的重力G、钩码上升的高度h
2.需要的测量工具:弹簧测力计、刻度尺
4.总功、有用功、额外功之间的关系:W总﹦W有用﹢W额外
二、机械效率(符号:η)
1.定义:在物理学中,将有用功与总功的比值,叫做机械效率。
2.机械效率通常用百分数表示:机械效率=(有用功/总功)×100℅
表达式:η=(W有用/ W总)×100℅
注:对于实际机械,由于额外功的存在,总有W有用<W总,因此η<100℅。
三、测定滑轮组的机械效率的实验
1.原理:η=(W有用/ W总)×100℅
2.器材:弹簧测力计、刻度尺、铁架台、滑轮组、钩码
3.需测量的物理量:绳受到的拉力F、手移动的距离S、
钩码受到的重力G、钩码上升的高度h
4.实验记录表:。