机器人走8字
机器人等级考试-8字寻迹

程序运行:
四
状态4-右转弯:右边的传感器在黑色线里,左边传 感器没有在黑色里。
else if ((leftValue==0)&& (rightValue==1) ) { a=1; turnRight(); }
a=0;b=0; forward();}
//******前进******// void forward(){ motor2.run(2,IntSpeed); motor1.run(1,IntSpeed); }
程序运行:
三
状态3-左转弯:左边的传感器在黑色线里,右边传 感器没有在黑色里。
else if ((leftValue==1) &&(rightValue==0)){ b=1; turnLeft ();}
项目十二:自律型自动跟随小车 所需器件:
➢ 已搭建好的智能小车辆
11接口: ➢ S1——黄
12接口: ➢ VCC——红 ➢ S2 ——黄 ➢ Gnd——黑
程序运行:
二 一
小车巡线状态
状态1-直线:左边和右边的传感器同时在黑色线里; 状态2-十字路口:左边和右边的传感器同时在黑色 线里; if ((leftValue==1)&& (rightValue==1)){
rotateRight ();//原地左旋找到循迹线 } else if ((leftValue==0)&& (rightValue==0)&& (a<b) ) { // 双偏(没有黑线)
8款智能早教机器人

31随着科技的发展,智能早教机器人的功能越来越丰富,外形也在不断进步和变化。
小编为读者准备了8款盖上“深圳造”印章的智能早教机器人,看看它们有哪些特色。
8款智能早教机器人1.新款波比熊A3S 智能机器人出品方:深圳市小桔灯儿童用品科技有限公司(波比熊)产品特点:新款机型拥有瓷质高光外观,安全环保。
A3S 产品可随时随地语音打断,随喊随应,开启语音互动场景;还可以智能合成记录爸爸妈妈的声音,让A3S 的声音变成父母的声音,陪伴孩子。
中间技能键有5种新功能切换,让孩子更加便捷地学习更多知识。
2.AI 爱豆智能教育机器人出品方:实丰文化发展股份有限公司(爱豆)产品特色:拥有Hi-Fi 音箱音质,内置1080P 高清摄像头,支持远程视频聊天和多角度监护,通过手机APP 可以抓拍和拍摄孩子的点滴成长。
AI 纯语音交流配合眼部屏幕丰富的表情变化,可以模拟人类真实有趣的情感反应。
爱豆接入云端平台,独享海量早教内容,精选超过5万种线上教育资源,更有咪咕音乐正版授权、知识百科、中英翻译、互动小游戏等,可以有效激发孩子的学习兴趣。
3.智能互动机器人-太空战警出品方:汕头市美致模型有限公司(思博科)产品特色:这款太空战警是美致旗下全新儿童科技品牌思博科出品的益趣玩具,包含5种游戏模式,将智能跟随、红外避障、音乐播放、遥控指挥、安全子弹、语言表达等融于一体,升级了益智产品的可玩性。
其产品外形采用太空战警的卡通形象,搭配内置角色语言,让人仿佛置身于太空场景之中,激发孩子的想象力和创造力。
简单易操作,且采用安全材质。
产品适用于6岁以上孩子,将在2018年11月推出。
4.兔小霸儿童语音智能早教机器人出品方:深圳市博悦生活用品有限公司(火火兔)产品特色:兔小霸是火火兔和百度战略合作的一款机器人,引进了百度对话式人工智能系统,获得了全网海量信息资源支持。
其智能交互功能,让孩子可以随心所欲猜谜语、学词语、练听力;微信对讲功能,让家长随时随地与孩子保持联系;内置火火兔儿童FM,每晚234132TOY INDUSTRY7点—11点期间,火火兔姐姐会给宝宝讲绘本故事等。
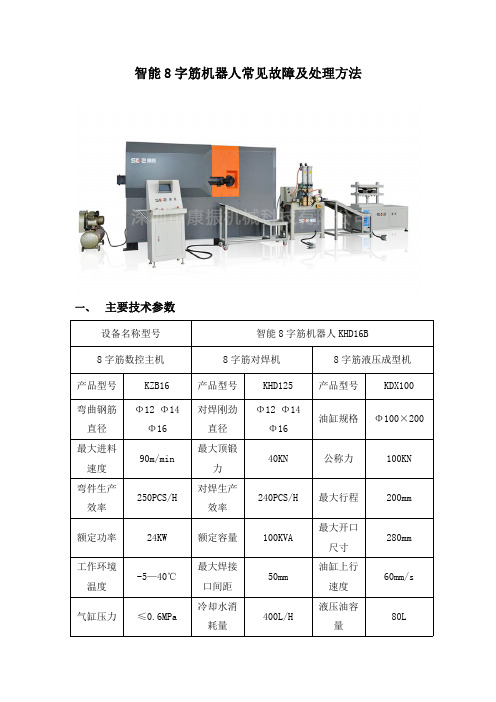
智能8字筋机器人常见故障及处理方法
油缸上行 速度
液压油容 量
200mm 280mm 60mm/s 80L
设备外形 3170×1000 设备外形 1190×650× 设备外形 1500×600×
尺寸
×1990
尺寸
1720
尺寸
1300
二、常见故障及处理方法
机构名称 故障现象
故障原因
故障解决方法
检查联机及电缆是否接牢
主机与控制柜未联机 固
系统不工
检查各感应位置及感应开
作
系统处于报警状态
整
关是否损坏
机
急停按钮被按下
恢复急停控制按钮
故
元器件、气阀损坏或气压不 更换元器件或气阀、增加气
障
执行机构
够
路压力
不工作 控制线路接触不良或断开
检查发生故障的线路
感应开关松动
检查感应开关
进料伺服 电机报警
过热,超负荷
停止工作,电机散热到室 温。调整压紧轮汽缸压力到 0.2Mpa,重新调整矫直轮的 压紧力,减小电机负荷。
智能 8 字筋机器人常见故障及处理方法
一、 主要技术参数
设备名称型号
智能 8 字筋机器人 KHD16B
8 字筋数控主机
8 字筋对焊机
8 字筋液压成型机
产品型号
KZB16
产品型号 KHD125 产品型号 KDX100
弯曲钢筋 直径
最大进料 速度
弯件生产 效率
额定功率
工作环境 温度
气缸压力
Φ12 Φ14 Φ16
有毛边
刀片损坏或松动 动、定刀片间间隙过大
动刀停的位置不准
更换刀片或对刀片加以紧 固
调整间隙, 调整感应开关位置或调整、
七八孔的成语四个字

七八孔的成语四个字
1. 七上八下:哎呀,我的心情现在就跟那七上八下的水桶似的,比如明天就要考试了,我能不慌吗?
2. 七嘴八舌:瞧那一群人,七嘴八舌地讨论个不停,就像一群叽叽喳喳的小鸟。
比如在讨论去哪里玩的时候,那场面可热闹了!
3. 七零八落:这房间被他弄得七零八落的,简直像被打劫过一样。
就好比一阵狂风刮过,东西都散了一地。
4. 七拼八凑:他那辆车是七拼八凑起来的,还真能开,就好像用各种零件拼凑起来的机器人。
比如他从不同地方找来零件组装的。
5. 七颠八倒:他喝多了酒,走路都七颠八倒的,像个醉汉一样。
比如那次聚会上,他喝多后那摇摇晃晃的样子。
6. 七老八十:我爷爷都七老八十了,还精神矍铄呢!就像一棵历经岁月的老树依然挺拔。
比如他每天还能去散步呢。
7. 七长八短:这堆木头七长八短的,怎么用啊?好比是参差不齐的牙齿。
比如在工地看到的那些杂乱的木材。
8. 七高八低:这条路上七高八低的,真难走,就像人生的路一样坎坷。
比如上次走那条小路时,深一脚浅一脚的。
9. 七弯八拐:这胡同七弯八拐的,很容易迷路啊,像个迷宫似的。
比如第一次走进去的时候,转了好久才出来。
10. 七拉八扯:他们在那七拉八扯地闲聊,什么都能说到。
好比是随意交织的线团。
比如几个朋友聚在一起时漫无目的地聊天。
我的观点结论:这些七八孔的成语真的很有意思,生动形象地表达了各种场景和心情,让我们的语言更加丰富多彩。
扫地机器人说明文
扫地机器人说明文扫地机器人说明文1扫地简直是太累啦!扫地是人们常常吐槽的一件事情,有时候人们甚至直接对扫地“放弃治疗”了。
原本好好的一个地板,过了几天就已经“蓬头垢面”了。
但是你有没有想过,现代的科技是无边无际的,以前看似不可思议的事情,现在已经变得“小儿科”了。
扫地,也被高科技替代了。
扫地机器人做起事来兢兢业业、悄悄无闻,它从来也没有喊过一声苦,心甘情愿为人们做牛做马。
这简直就是宏大的“孺子牛扫地精神”!扫地机器人的外形并不是很“光荣夺目”,相反,浑身上下都是朴实的黑色。
整个身体呈现出圆形,后面的一个抹布,占了机器人底盘的二分之一,前面的两把刷子,始终都在为扫除地板上的“黑恶势力”立下了汗马功劳。
机器人还有一个装垃圾的盒子,这个盒子往往都是满载而归。
最终,扫地机器人还有一个连接着抹布的“水箱子”,正是这个箱子为抹布供应了宝贵的水分。
其他的零件儿,我就不一一讲解了。
扫地机器人可真是扫地的“肱骨之臣”啊!别看它的样子长得“笨笨”的,可是它真专心呀。
机器人在闷热的.家里来回的扫地,就犹如在烈日暴晒下辛辛苦苦耕种的老黄牛一样。
而我,却在书房里开着空调、翘着二郎腿、喝着果汁,悠闲适闲的看着汪曾祺写的《人间有味》,这真是天壤之别!而且扫地机器人还会记录着自己经过的地点,然后汇聚成一幅简而易懂的家庭地图。
看着扫地机器人劳动的身影,我不禁赞扬道:“好哇,好哇!真是一个吃苦耐劳的好机器人!”当然,扫地机器人也有“消化不良的时候。
有一次,机器人汲取了一颗大钉子,然后立刻发出了“求救信号”,我立刻跑过去,把它按在地上,慢慢的把这个“飞来横祸”——钉子取了出来。
还有好几次,机器人进行了“非法越界”行动,机器人直接“纵身一跃”来到了我的地毯之上,接着,我精心摆好的地图等物品被机器人搞得一塌糊涂!后来,我爸爸在清理扫地机器人时,无意中的发觉了我的一个乐高大斧。
扫地机器人,我对它说了感谢,更重要的是,地板也很感谢它。
扫地机器人说明文2“纸上得来终觉浅,绝知此事要躬行。
能力风暴机器人走8字
能力风暴机器人走8字
能力风暴机器人是一款拥有卓越行进能力的机器人。
它可以轻松地进行8字形状的行走。
无论是在宽敞的场地,还是狭小的空间,它都能灵活自如地前进。
这款机器人通过编程精确地控制各个轮子的速度和方向,实现平稳而精准的转弯动作。
它的智能算法能够根据环境的变化,迅速调整步伐和姿态,确保行进的稳定性和安全性。
不论是在野外探险,还是在城市中穿梭,能力风暴机器人都能轻松应对各种地形和复杂道路。
它不仅具备超强的机动性,还配备了先进的传感器系统,能够实时感知周围环境并做出相应的反应。
综合这一系列创新技术,能力风暴机器人成为了无人探险、救援行动以及工业应用等领域的得力助手。
无论是在紧急情况下的应急救援,还是在探索未知领域的科学考察,能力风暴机器人都展示了其独特的8字行走能力,成为了现代科技进步的杰出代表之一。
声控舞蹈机器人资料
《机器人制作》项目四舞蹈机器人说课稿电力工程系刘远明舞蹈机器人?由单片机程序控制,能顺序完成一定动作的机器人。
舞蹈机器人可只是按照一定程序完成预定的一些动作,结构比较简单,具有机器人的基本结构和要素,是制作其他高水平智能机器人的基础。
在本项目开始前,我们来回忆一下前面几个项目的内容:在项目一我们设计制作了机器人的车体项目二我们设计焊装了单片机控制板项目三我们学习了单片机编译软件KEIL的使用通过前面的学习和制作,我们了解到了机器人由机械、电路、软件等几部分组成。
机械部分:包括车体、车轮、电动机等部件。
电路部分:包括单片机控制电路、电机驱动电路、(传感电路、)电源电路等。
(机械部分和电路部分也可归为硬件部分)他们组成了机器人的躯体。
软件部分:主要是编写的程序,把对机器人的运动状态按要求编写成指令,写入单片机,再由单片机端口控制机械运动部分完成各种预设的动作。
软件就是机器人的灵魂了。
项目四将帮助我们给机器人注入灵魂,使机器人能够运动起来。
项目四声控舞蹈机器人项目引导任务驱动组织教学项目目标:制作一个机器人,能按事先编写的程序完成相关的动作,机器人由声控启动。
知识与能力目标:1、复习单片机编程方法和指令,利用机器人这个平台,学会用单片机对实际对象的智能化控制,真正掌握单片机的应用技术。
2、熟悉单片机对机器人控制的基本原理,了解各种接口电路,能正确连接装配机器人。
3、复习模拟电子技术相关知识,自行设计一个声控电路,并制作成为一个声控模块备用。
4、进一步熟悉KEIL软件的使用方法,正确编写、调试机器人的运行程序。
项目技术要求:1、制作完成的机器人,能正确执行走口字、走0字、走8字等基本动作和规定动作。
2、自行设计制作声控模块,外形小巧,焊点光亮、工作可靠,和单片机连接吻合。
3、机器人接通电源时不工作,拍手后启动,按设定程序工作,程序完成后,能自动停止。
项目内容任务一认识机器人的控制原理 任务二机器人控制代码的编写 任务三舞蹈程序的编写任务四声控模块设计制作任务五舞蹈机器人调试大课业:舞蹈机器人竞赛任务一认识机器人的控制原理任务目标:了解单片机对电动机运行的控制方法,掌握电动机各种控制的程序编写原理车体结构示意图课题1 舞蹈机器人运行原理L R 前进361114左驱动轮右驱动轮导向轮最简结构的机器人课题2、单片机与电动机的连接AT89S51单片机驱动电路专用芯片左右电机与控制电路端口关系编程指令SETB P2.3CLR P2.2CLR P2.1SETB P2.0指令解释:SETB ---指定端口为高电平CLR ---指定端口为低电平课题3、机器人的方向控制课题3、机器人的方向控制CLR P2.3SETB P2.2SETB P2.1CLR P2.0课题3、机器人的方向控制CLR P2.3CLR P2.2CLR P2.1SETB P2.0课题3、机器人的方向控制SETB P2.3CLR P2.2CLR P2.1CLR P2.0任务二、机器人控制代码的编写任务目标:学会端口电路的分析方法,能够正确编制电动机驱动编码,为正确编制单片机驱动程序做准备。
智能的机器人作文300字合集8篇
智能的机器人作文300字合集8篇智能的机器人作文300字合集8篇在日常的、工作、中,说到作文,大家肯定都不生疏吧,作文是经过人的思想考虑和语言组织,通过文字来表达一个主题意义的记叙方法。
一篇样的作文才能称之为优秀作文呢?下面是搜集的智能的机器人作文300字8篇,欢迎阅读,希望大家可以喜欢。
如今的机器人越来越先进了,可以照顾小朋友、可以当效劳员、可以到海底去探险了!我创造了机器人,我还给它取了一个名字,叫:老妈一号。
老妈一号一头乌黑光亮的头发、大大的眼睛,小小的鼻子,红红的嘴唇,浓浓的眉毛。
有一天,我说:“老妈来检查作业。
”老妈检查了一会儿,瞪着大眼睛问:“这是你做的作业吗?”我可怜巴巴的说:“是的。
”“你怎么错了这么多?”我把错的改了。
有一天,我说:“老妈来检查作业。
”老妈来了,我错了的老妈都耐心教我做作业。
我纳闷了,今天老妈怎么这么温和?我才记起来,老妈今天加班,跟我检查作业的是我创造的老妈一号呀!老妈一号机器人是比真正的老妈好得多呀!老妈一号很温和,真正的老妈很粗暴的。
老妈一号不打小孩,真正的老妈打小孩。
老妈我多么希望我还没创造老妈一号之前,你变成老妈一号呀!20xx年,一群火星科学家来到地球。
他们假装在地球上做一次危险实验,实际上是要进攻地球,地球著名科学家知道了他们的诡计,于是派了四个智能机器人前去消灭这一群火星科学家。
智能机器人们来到火星科学家的基地。
向他们发起攻击,火星科学家用那些研究好了的绿色庞大生物向智能机器人们投去。
一瞬间,小小的绿色生物变大了,变成一个个绿色巨人,向智能机器人冲来,有两个机器人一不小心被绿色巨人击倒在地上,可见绿色巨人的威力非常强大,智能机器人马上向绿色巨人发起攻击,不一会儿,第一群绿色巨人被消灭掉,智能机器人自然也不是没用的。
第二群绿色巨人会隐身,这下智能机器人有费事了绿色巨人从后面袭击智能机器人,两个智能机器人相继倒下,火星科学家准备用绿色巨人袭击了地球,这时智能机器人不忍心让地球被消灭,于是启动牺牲功能,与绿色巨人和火星科学家同归于尽。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
按照走轨迹-沿黑线走的机器人最基本的算法,可以用1个光感,2个光感,3个光感,4个光感来走。
其中,1个光感的原理如下
2个光感的原理如下
我们用2个光感走八字,走8字图如下
发现有很多问题,可以走,但是稳定性很低。
1、如果速度不调低,基本上,在90度转弯的地方容易冲出黑线。
2、右转的时候跟走直线一样,基本还是比较稳定的,但是左转的时候,基本上都是要冲出黑线。
等等状况。
我们几个辅导教师讨论后一致认为原因可能有二:1、乐高的马达自身的问题,可能存在左右轮子的旋转方式的问题,这个问题还没有求证过。
2、车子的结构的问题,这个问题已经求证过,确实应该在改进车子方面多花点时间。
3、LEGO 程序执行的效率得问题,这个问题仍没有验证过。
所以,2个光感的方案,很显然就是很不稳定,无论是哪种原因,设备的,结构的,软件的;总归一句,如果要稳定,一定得用3光感,或者4光感的方案。
以下就是我晚上用3光感方案搭的小车和程序图。
3光感小车
参考程序截图
主程序截图
子程序截图
以上为完整的3光感程序,2端口光感位置在中间。
光感值,要随环境的变化来调整。
之前我也试过用容器,但是没办法实现,之后再用容器来实现,这样比较方便场地调试使用,不过直接用数字来调整也是相当的稳定。
我试过十来次,基本上都完整的完成了任务。
这个3光感的基本思路如下:有空来写
(………………………………)
LEGO乐高机器人走八字8字的视频已经录完,还有走八字.vi 程序都有,需要的朋友联系我:QQ7664553。