倒立摆系统的状态空间极点配置控制设计
任务1-一级倒立摆系统的状态反馈极点配置设计
西安建筑科技大学课程设计(论文)任务书专业班级:学生姓名:指导教师(签名):一、课程设计(论文)题目一级倒立摆系统的状态反馈极点配置设计二、本次课程设计(论文)应达到的目的(1)复习、巩固和加深所学专业基础课和专业课的理论知识,综合运用经典控制理论与现代控制理论的知识,弄清楚其相互关系,使理论知识系统化、实用化。
(2)增强学生的工程意识,联系实际问题设计,使理论与实践相结合。
(3)掌握基于状态空间分析法进行控制系统分析与综合的方法。
(4)训练利用计算机进行控制系统辅助分析与仿真的能力。
(5)掌握参数变化对系统性能影响的规律,培养灵活运用所学理论解决控制系统中各种实际问题的能力。
(6)培养分析问题、解决问题的独立工作能力,学习实验数据的分析与处理方法,学习撰写设计说明书。
三、本次课程设计(论文)任务的主要内容和要求(包括原始数据、技术参数、设计要求等)系统参数:本课程设计的被控对象采用固高公司生产的GIP-100-L型一阶倒立摆系统,系统内部各相关参数为:小车质量0.5 Kg ;摆杆质量0.2 Kg ;小车摩擦系数0.1 N/m/sec ;摆杆转动轴心到杆质心的长度0.3 m ;摆杆惯量0.006 kg*m*m ;采样时间0.005秒。
设计要求:设计状态反馈控制器,使得当在小车上施加1N的脉冲信号时,闭环系统的响应指标为:(1)稳定时间小于5秒(2)稳态时摆杆与垂直方向的夹角变化小于0.1 弧度设计主要内容:(1)参照相关资料,推导出系统的传递函数和状态空间方程。
(2)定量、定性分析系统的性能。
(3)设计状态反馈控制器,使得当在小车上施加1N的脉冲信号时,闭环系统的响应满足性能指标要求。
(4)对设计的系统进行仿真研究、校验与分析。
(5)设计状态观测器,讨论带有状态观测器的状态反馈系统的性能。
成果要求:书写课程设计说明书一份(6000-10000字)。
内容应包括数学模型建立,控制器设计,系统仿真过程、结果分析及结论。
电气系统综合设计实验报告直线一级倒立摆控制系统设计

电气控制系统设计——直线一级倒立摆控制系统设计学院轮机工程学院班级电气1111姓名李杰学号 36姓名韩学建学号 35成绩指导老师肖龙海2014 年 12 月 25 日小组成员与分工:韩学建主要任务:二阶系统建模与性能分析,二阶控制器的设计,二阶系统的数字仿真与调试,二阶系统的实物仿真与调试;二阶状态观测器的数字仿真与调试,二阶状态观测器的实物仿真与调试;李杰主要任务:四阶系统建模与性能分析,四阶控制器的设计,四阶系统的数字仿真与调试,四阶系统的实物仿真与调试;四阶状态观测器的数字仿真与调试,四阶状态观测器的实物仿真与调试;前言倒立摆系统是非线性、强耦合、多变量和自然不稳定的系统,倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究;倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展;本报告通过设计二阶、四阶两种倒立摆控制器来加深对实际系统进行建模方法的了解和掌握随动控制系统设计的一般步骤及方法;熟悉倒立摆系统的组成及基本结构并利用MATLAB对系统模型进行仿真,利用学习的控制理论对系统进行控制器的设计,并对系统进行实际控制实验,对实验结果进行观察和分析,研究调节器参数对系统动态性能的影响,非常直观的了解控制器的控制作用;目录第一章设计的目的、任务及要求倒立摆系统的基本结构 (4)设计的目的 (4)设计的基本任务 (4)设计的要求 (4)设计的步骤 (5)第二章一级倒立摆建模及性能分析微分方程的推导 (5)系统的稳定性和能控能观性分析 (11)二阶的能观性、能控性分析 (13)四阶的能观性、能控性分析 (18)第三章倒立摆系统二阶控制器、状态观测器的设计与调试设计的要求 (22)极点配置 (22)控制器仿真设计与调试 (23)状态观测器仿真设计与调试 (28)第四章倒立摆系统四阶控制器、状态观测器的设计与调试设计的要求 (26)极点配置 (26)控制器仿真设计与调试 (27)状态观测器仿真设计与调试 (28)心得体会 (31)参考文献 (31)第一章设计的目的、任务及要求倒立摆系统的基本结构与工作原理图倒立摆系统硬件框图图倒立摆系统工作原理框图倒立摆系统通过计算机、I/O卡、伺服系统、倒立摆本体和光电码盘反馈测量元件组成一个闭环系统;以直线一级倒立摆为例,其工作原理框图如图所示;图中光电码盘1由伺服电机自带,小车的位移可以根据该码盘的反馈通过换算获得,速度信号可以通过对位移的差分得到;各个摆杆的角度由光电码盘2测量并直接反馈到I/O卡,而角速度信号可以通过对角度的差分得到;计算机从I/O卡实时读取数据,确定控制决策电机的输出力矩,并发给I/O卡;I/O卡经过电控箱内部电路产生相应的控制量,驱动电机转动,使小车按控制要求进行运动,以达到控制目的;实验过程中需要了解倒立摆装置基本结构;了解编码盘、行程开关等的基本工作原理;进行行程开关、编码盘和电机基本测试;设计的目的本设计要求我们针对设计要求,利用课堂所学知识及实验室实测来的系统数据采用工程设计法进行一级直线倒立摆控制系统设计;绘制原理图,同时在实验室进行实验检验设计结果,分析数据,编写设计报告;目的是使学生掌握随动控制系统设计的一般步骤及方法;设计的基本任务本课程设计的被控对象采用固高科技生产的GLIP2001一级直线倒立摆;通过设计与调试使学生能够:1熟悉倒立摆系统的组成及其基本结构;2掌握通过解析法建立系统数学模型及进行工作点附近线性化的方法;3掌握系统性能的计算机辅助分析;4掌握系统控制器的设计与仿真;5研究调节器参数对系统动态性能的影响;设计的要求1.熟悉倒立摆系统结构,熟悉倒立摆装置的基本使用方法;2.建立系统的数学模型,并在工作点附近线性化;3.分析系统的稳定性、频域性能、能控性与能观性;4.采用状态空间的极点配置法设计控制器,要求系统调节时间ts<=3s,阻尼比ξ>= and ξ<=1;实验步骤1.倒立摆系统基本结构分析2.对象的建模3..系统性能分析4.控制器设计与调试5.设计报告的撰写第二章一级倒立摆建模及性能分析系统建模可以分为两种:机理建模和实验建模;实验建模就是通过在研究对象上加上一系列的研究者事先确定的输入信号,激励研究对象并通过传感器检测其可观测的输出, 应用数学手段建立起系统的输入-输出关系;这里面包括输入信号的设计选取,输出信号的精确检测,数学算法的研究等等内容;机理建模就是在了解研究对象的运动规律基础上,通过物理、化学的知识和数学手段建立起系统内部的输入-状态关系;对于倒立摆系统,由于其本身是自不稳定的系统,实验建模存在一定的困难;但是忽略掉一些次要的因素后,倒立摆系统就是一个典型的运动的刚体系统,可以在惯性坐标系内应用经典力学理论建立系统的动力学方程;下面采用牛顿-欧拉方法建立直线型一级倒立摆系统的数学模型;微分方程的推导在忽略了空气阻力和各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如图所示;我们不妨做以下假设:M 小车质量m 摆杆质量b 小车摩擦系数l 摆杆转动轴心到杆质心的长度I 摆杆惯量 F 加在小车上的力x 小车位置φ摆杆与垂直向上方向的夹角θ摆杆与垂直向下方向的夹角考虑到摆杆初始位置为竖直向下图是系统中小车和摆杆的受力分析图;其中,N 和P 为小车与摆杆相互作用力的水平和垂直方向的分量;注意:在实际倒立摆系统中检测和执行装置的正负方向已经完全确定,因而矢量方向定义如图所示,图示方向为矢量正方向;分析小车水平方向所受的合力,可以得到以下方程:①由摆杆水平方向的受力进行分析可以得到下面等式:②即:③把这个等式代入①式中,就得到系统的第一个运动方程④为了推出系统的第二个运动方程,对摆杆垂直方向上的合力进行分析,可以得到下面方程:⑤⑥力矩平衡方程如下:⑦注意:此方程中力矩的方向,由于θ= π+φ,cosφ= -cosθ,sinφ= -sinθ,故等式前面有负号; 合并这两个方程,约去P 和N ,得到第二个运动方程:⑧设θ=π+φφ是摆杆与垂直向上方向之间的夹角,假设φ与1单位是弧度相比很小,即φ<<1,则可以进行近似处理:用u 来代表被控对象的输入力F ,线性化后两个运动方程如下:⑨对式3-9进行拉普拉斯变换,得到⑩注意:推导传递函数时假设初始条件为0;由于输出为角度φ,求解方程组的第一个方程,可以得到:⑾⑿如果令则有⒀把上式代入方程组的第二个方程,得到:⒁整理后得到传递函数:⒂其中,该系统状态空间方程为:⒃方程组对解代数方程,得到解如下:⒄整理后得到系统状态空间方程:⒅由9的第一个方程为对于质量均匀分布的摆杆有:于是可以得到:化简得到:⒆⒇以小车加速度为输入的系统状态空间方程:稳定性分析P=polyA;r=rootsP;ii=findrealr>0;n=lengthii;ifn>0disp'不稳定';elsedisp'稳定';end不稳定由此得到系统在未加控制器之前是发散的,不稳定的能控能观性分析A= 0 1 0 0;0 0 0 0;0 0 0 1;0 0 0;B= 0 1 0 3';C= 1 0 0 0;0 0 1 0;D= 0 0 ';>> n=4;Uc=ctrbA,B;Vo=obsvA,C;>> ifrankUc==nifrankVo==ndisp'系统状态即能控又能观'else disp'系统状态即能控,但不能观'endelse ifrankVo==ndisp'系统状态能观,但不能控'else disp'系统状态不能控,但也不能观' endend系统状态即能控又能观二阶的能观性、能控性分析>> A=0 1; 0;>> B=0 3';>> C=0 0 ;1 0;>> D=0;二阶能控性分析:>> M=ctrbA,BM =0 33 0>> rankMans =2说明系统是能控的二阶能观性分析:>> N=obsvA,CN =0 11 0>> rankNans =2说明系统是能观的四阶的能观性、能控性>> A=0 1 0 0; 0 0 0 0;0 0 0 1;0 0 0;;>> B=0 1 0 3';>> C= 1 0 0 0;0 0 1 0;>> D=0 0';四阶能控性分析:>> M=ctrbA,BM =0 0 00 0 00 00 0>> rankMans =4说明系统是能控的四阶能观性分析:>> N=obsvA,CN =0 0 00 0 00 0 00 0 00 0 0 00 0 00 0 0 00 0 0>> rankNans =4说明系统是能观的第三章倒立摆系统二阶控制器的设计设计的要求建立以X’’为输入,Φ与Φ’为状态变量,y为输出的模型分析系统的稳定性,能控能观性设计状态反馈控制器进行极点配置,是系统ξ>= ts<=3s极点配置取ξ=,Ts=;则Wn=,极点为±利用MATLAB进行计算:clear;T=input'T=';zeta=input'zeta=';Wn=4/Tzeta;A=0 1; 0;B=0;3;S1=-zetaWn-Wnsqrtzeta^2-1;S2=-zetaWn+Wnsqrtzeta^2-1;P=S1,S2;K=placeA,B,P则:K0=,K1=;控制器的仿真测试与调试图二阶系统结构图以小车加速度为输入,摆杆偏移角度和角速度为状态变量的模型,K值为反馈矩阵,输出为角度的波形图仿真波形图:取 &= 极点为:Wn=则 K0= K1= 图仿真结果波形图有次图可得加入控制器之后系统可以稳定,可见控制器的设计是合理的硬件调试硬件调试结构图以小车加速度为输入,摆杆偏移角度和角速度为状态变量的模型,加入Л模块纠正反馈角度符号通过调试K值,当K取的时候,可使仿真结果较稳定;从摆杆的角度可以看出,角度可以稳定下来,施加一干扰后,摆杆可以很快恢复稳定;状态观测器的仿真测试与调试图二阶状态观测器数字仿真图以小车加速度为输入,摆杆偏移角度和角速度为状态变量的模型,K值为反馈矩阵,输出为角度的波形图仿真波形图:取 &= 极点为:Wn=则 K0= K1= 图仿真结果波形图反馈矩阵G的求法T=input'T=';zeta=input'zeta=';Wn=4/Tzeta;A=0 1; 0;B=0;3;C=1 0;S1=-zetaWn-Wnsqrtzeta^2-1;S2=-zetaWn+Wnsqrtzeta^2-1;P=S1,S2;OP=5P;G=placeA',C',OPG=实物调试由图可知,施加扰动后摆杆能很快恢复,符合系统要求;第四章倒立摆系统四阶控制器的设计设计要求根据设计要求,确定系统闭环极点,设计状态反馈控制器,并进行仿真、调试验证;极点配置取 &= T= Wn= 极点为:±;-20±利用MATLAB进行计算:T=input'T=';zeta=input'zeta=';Wn=4/Tzeta;A=0 1 0 0;0 0 0 0;0 0 0 1;0 0 0;B=0;1;0;3;S1=-zetaWn-Wnsqrtzeta^2-1;S2=-zetaWn+Wnsqrtzeta^2-1;P=,-20+,S1,S2;K=placeA,B,Pk0=,k1=,k2= ,k3=;则K=控制器的仿真测试与调试图四阶系统仿真结构图以小车加速度为输入,摆杆角度、角速度、小车位移、加速度为状态变量,上半部分为位移输出,下半部分为角度输出仿真结果:位移:角度:实物调试:图硬件调试结构图将K1、K2、K3、K4合并后反馈作用系统,系统为单输入双输出四阶一级倒立摆状态空间极点配置实时控制结果平衡时上为位移,下位角度直线一级倒立摆状态空间极点配置实时控制结果施加干扰上为位移,下位角度状态观测器仿真设计与调试图四阶状态观测器数字仿真图四阶系统仿真结构图以小车加速度为输入,摆杆角度、角速度、小车位移、加速度为状态变量,上半部分为位移输出,下半部分为角度输出反馈矩阵G的求法T=input'T=';zeta=input'zeta=';Wn=4/Tzeta;A=0 1 0 0;0 0 0 0;0 0 0 1;0 0 0;B=0;1;0;3;C=1 0 0 0;0 0 1 0;S1=-zetaWn-Wnsqrtzeta^2-1;S2=-zetaWn+Wnsqrtzeta^2-1;P=,-10+,S1,S2;OP=3P;G=placeA',C',OP'G =实物调试反馈矩阵G和增益矩阵K分别调用matlab程序即可实物仿真与结果心得体会通过此次课程设计,使我更加扎实的掌握了有关MATLAB方面的知识,在设计过程中虽然遇到了一些问题,但经过一次又一次的思考,一遍又一遍的检查终于找出了原因所在,也暴露出了前期我在这方面的知识欠缺和经验不足;实践出真知,通过亲自动手制作,使我们掌握的知识不再是纸上谈兵;课程设计诚然是一门专业课,给我很多专业知识以及专业技能上的提升,同时又是一门讲道课,一门辩思课,给了我许多道,给了我很多思,给了我莫大的空间;同时,设计让我感触很深;使我对抽象的理论有了具体的认识;通过这次课程设计,我掌握了倒立摆装置的识别和测试;熟悉了控制系统的设计原理;了解了现代控制理论的设计方法;以及如何提高倒立摆系统的性能等等,掌握了MATLAB、simulink的使用方法和技术,通过查询资料,对所学知识有了很多新的认识;自己写主要参考文献:1.夏德玲、翁贻方,自动控制理论.北京,北京工业大学出版社,2006年1月2.刘豹、唐万生,现代控制理论.北京,机械工业出版社,2006年6月3.李国勇、谢克明,计算机仿真技术与CAD.北京,电子工业出版社,2009年1月4.Googol Technology直线倒立摆系统GLIP系列安装与使用手册固高科技。
倒立摆状态反馈极点配置与LQR控制Matlab实现

倒立摆状态反馈极点配置与LQR控制Matlab实现刘文秀;郭伟;余波年【摘要】为了实现对绝对不稳定的非线性多变量倒立摆系统的控制,采用了状态反馈极点配置和LQR控制2种方法.状态反馈极点配置是将多变量系统的闭环系统极点配置在期望的位置上,从而使系统满足瞬态和稳态性能指标.LQR算法是在一定的性能指标下,利用最少的控制能量,来达到最小的状态误差.通过Matlab软件仿真实验,发现2种控制方法对于倒立摆这种不稳定的系统有一定的控制作用,证明了两种控制方案的可行性和有效性.仿真表明二次型最优控制有较小的振荡和超调量,对系统有更好的控制效果.%The state feedback pole placement and LQR controller are adopted to control the inverted pendulum system which is absolute unstable nonlinear multivariable. The state feedback pole placement is to set the closed-loop system poles of multivariable systems on the desired position to make the system satisfy the performance indexes in transient state and steady state. LQR algorithm uses the least control energy under certain performance index to achieve the smallest state errors.Through the simulation experiment with Matlab software, it is discovered that the two methods have some control effect to this unstable inverted pendulum system. It proves that the two methods are feasible and efficient. Simulation shows that the quadratic optimal control has smaller oscillation and overshoot, and the system has better control effect.【期刊名称】《现代电子技术》【年(卷),期】2011(034)010【总页数】3页(P88-90)【关键词】倒立摆;Matlab;LQR;极点配置【作者】刘文秀;郭伟;余波年【作者单位】广东韶关学院自动化系,广东韶关512005;广东韶关大江南输变电工程有限公司,广东韶关521005;广东韶关学院自动化系,广东韶关512005【正文语种】中文【中图分类】TN919-340 引言目前对于各高校而言,比较典型的控制对象就是倒立摆,因为它是一个绝对不稳定的非线性多变量的系统,作为一个多变量系统对于它的控制主要是以现代控制理论为基础的。
自动控制原理课程设计-倒立摆系统控制器设计
1 引言支点在下,重心在上,恒不稳定的系统或装置的叫倒立摆。
倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。
1.1 问题的提出倒立摆系统按摆杆数量的不同,可分为一级,二级,三级倒立摆等,多级摆的摆杆之间属于自有连接(即无电动机或其他驱动设备)。
对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。
通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。
倒立摆的控制问题就是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度。
当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。
1.2 倒立摆的控制方法倒立摆系统的输入来自传感器的小车与摆杆的实际位置信号,与期望值进行比较后,通过控制算法得到控制量,再经数模转换驱动直流电机实现倒立摆的实时控制。
直流电机通过皮带带动小车在固定的轨道上运动,摆杆的一端安装在小车上,能以此点为轴心使摆杆能在垂直的平面上自由地摆动。
作用力u平行于铁轨的方向作用于小车,使杆绕小车上的轴在竖直平面内旋转,小车沿着水平铁轨运动。
当没有作用力时,摆杆处于垂直的稳定的平衡位置(竖直向下)。
为了使杆子摆动或者达到竖直向上的稳定,需要给小车一个控制力,使其在轨道上被往前或朝后拉动。
本次设计中我们采用其中的牛顿-欧拉方法建立直线型一级倒立摆系统的数学模型,然后通过开环响应分析对该模型进行分析,并利用学习的古典控制理论和Matlab /Simulink仿真软件对系统进行控制器的设计,主要采用根轨迹法,频域法以及PID(比例-积分-微分)控制器进行模拟控制矫正。
2 直线倒立摆数学模型的建立直线一级倒立摆由直线运动模块和一级摆体组件组成,是最常见的倒立摆之一,直线倒立摆是在直线运动模块上装有摆体组件,直线运动模块有一个自由度,小车可以沿导轨水平运动,在小车上装载不同的摆体组件。
利用极点配置法设计调节器型系统-倒立摆
1
2
3
4
因此
a1* = 24,
a
* 2
= 196,
a3* = 720,
a
* 4
= 1600
现采用式(5.13)来确定状态反馈增益矩阵 K,即
K
= [ a4∗ − a4 M
a3∗ − a3 M
a
∗ 2
−
a2
M
a1∗
−
a1
]
P −1
式中 P 即
P = QW
这里 Q 和 W 分别为
⎡0 −1 0 −20.601⎤ Q = [ B M AB M A2B M A3B ] = ⎢⎢− 1 0 − 20.601 0⎥⎥
⎥ ⎥
⎢− 9.81 0 0.5 0 ⎥
⎢⎣0 − 9.81 0 0.5⎥⎦
因此
⎢⎡− ⎢
0.5 9.81
P −1
=
⎢ ⎢
0
⎢ ⎢
−1
0
⎢⎣ 0
故状态反馈增益矩阵 K 为
0
− 0.5 9.81 0
−1
−1 9.81 0
0
⎤ ⎥
−
1
⎥ ⎥
9.81⎥
0
⎥ ⎥
00
⎥⎦
K
=
[
a* 4
−
a 4
M
a* 3
−
a 3
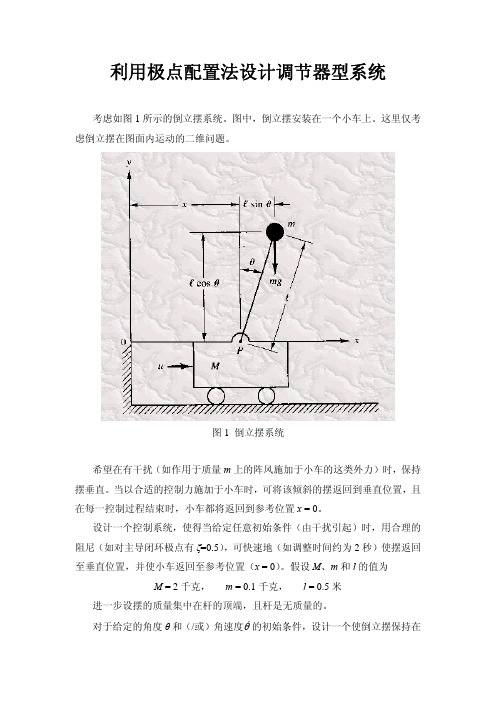
么,其数学模型为
(M + m)&x& + mlθ = u
(2)
ml 2θ&& + ml&x& = mglθ
(3)
式(2)和(3)定义了如图 2 所示的倒立摆系统的数学模型(只要 θ 不大,线性化
直线一级倒立摆系统的状态空间极点配置控制设计详细实验报告
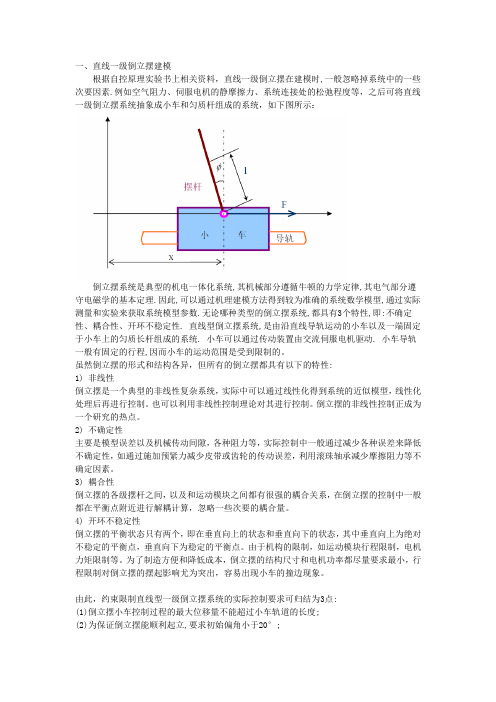
一、直线一级倒立摆建模根据自控原理实验书上相关资料,直线一级倒立摆在建模时,一般忽略掉系统中的一些次要因素.例如空气阻力、伺服电机的静摩擦力、系统连接处的松弛程度等,之后可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如下图所示:倒立摆系统是典型的机电一体化系统,其机械部分遵循牛顿的力学定律,其电气部分遵守电磁学的基本定理.因此,可以通过机理建模方法得到较为准确的系统数学模型,通过实际测量和实验来获取系统模型参数.无论哪种类型的倒立摆系统,都具有3个特性,即:不确定性、耦合性、开环不稳定性. 直线型倒立摆系统,是由沿直线导轨运动的小车以及一端固定于小车上的匀质长杆组成的系统. 小车可以通过传动装置由交流伺服电机驱动. 小车导轨一般有固定的行程,因而小车的运动范围是受到限制的。
虽然倒立摆的形式和结构各异,但所有的倒立摆都具有以下的特性:1) 非线性倒立摆是一个典型的非线性复杂系统,实际中可以通过线性化得到系统的近似模型,线性化处理后再进行控制。
也可以利用非线性控制理论对其进行控制。
倒立摆的非线性控制正成为一个研究的热点。
2) 不确定性主要是模型误差以及机械传动间隙,各种阻力等,实际控制中一般通过减少各种误差来降低不确定性,如通过施加预紧力减少皮带或齿轮的传动误差,利用滚珠轴承减少摩擦阻力等不确定因素。
3) 耦合性倒立摆的各级摆杆之间,以及和运动模块之间都有很强的耦合关系,在倒立摆的控制中一般都在平衡点附近进行解耦计算,忽略一些次要的耦合量。
4) 开环不稳定性倒立摆的平衡状态只有两个,即在垂直向上的状态和垂直向下的状态,其中垂直向上为绝对不稳定的平衡点,垂直向下为稳定的平衡点。
由于机构的限制,如运动模块行程限制,电机力矩限制等。
为了制造方便和降低成本,倒立摆的结构尺寸和电机功率都尽量要求最小,行程限制对倒立摆的摆起影响尤为突出,容易出现小车的撞边现象。
由此,约束限制直线型一级倒立摆系统的实际控制要求可归结为3点:(1)倒立摆小车控制过程的最大位移量不能超过小车轨道的长度;(2)为保证倒立摆能顺利起立,要求初始偏角小于20°;(3)为保证倒立摆保持倒立的平衡态,要求控制系统响应速度足够快。
倒立摆状态空间极点配置控制实验实验报告
倒立摆状态空间极点配置控制实验实验报告《现代控制理论》实验报告状态空间极点配置控制实验一、实验原理经典控制理论的研究对象主要是单输入单输出的系统,控制器设计时一般需要有关被控对象的较精确模型,现代控制理论主要是依据现代数学工具,将经典控制理论的概念扩展到多输入多输出系统。
极点配置法通过设计状态反馈控制器将多变量系统的闭环系统极点配置在期望的位置上,从而使系统满足瞬态和稳态性能指标。
1.状态空间分析对于控制系统X = AX + Bu选择控制信号为:u = ?KX式中:X 为状态向量( n 维)u 控制向量(纯量)A n × n维常数矩阵B n ×1维常数矩阵求解上式,得到 x(t) = (A ? BK)x(t)方程的解为: x(t) = e( A?BK )t x(0)状态反馈闭环控制原理图如下所示:从图中可以看出,如果系统状态完全可控,K 选择适当,对于任意的初始状态,当t趋于无穷时,都可以使x(t)趋于0。
2.极点配置的设计步骤1) 检验系统的可控性条件。
2) 从矩阵 A 的特征多项式来确定a1, a2,……,an的值。
3) 确定使状态方程变为可控标准型的变换矩阵 T:T = MW其中 M 为可控性矩阵,4) 利用所期望的特征值,写出期望的多项式5) 需要的状态反馈增益矩阵 K 由以下方程确定:二、实验内容针对直线型一级倒立摆系统应用极点配置法设计控制器,进行极点配置并用Matlab进行仿真实验。
三、实验步骤及结果1.根据直线一级倒立摆的状态空间模型,以小车加速度作为输入的系统状态方程为:可以取1l 。
则得到系统的状态方程为:于是有:直线一级倒立摆的极点配置转化为:对于如上所述的系统,设计控制器,要求系统具有较短的调整时间(约 3 秒)和合适的阻尼(阻尼比? = 0.5)。
2.采用四种不同的方法计算反馈矩阵 K。
方法一:按极点配置步骤进行计算。
1) 检验系统可控性,由系统可控性分析可以得到,系统的状态完全可控性矩阵的秩等于系统的状态维数(4),系统的输出完全可控性矩阵的秩等于系统输出向量y 的维数(2),所以系统可控。
直线型一级倒立摆系统的控制器设计

直线型一级倒立摆系统的控制器设计引言1. 设计目的(1)熟悉直线型一级倒立摆系统(2)掌握极点配置算法(3)掌握MATLAB/simulink动态仿真技术2. 设计要求基于极点配置算法完成对于直线型一级倒立摆系统的控制器设计3. 系统说明倒立摆控制系统是一个复杂的、不稳定的、非线性系统,对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。
通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。
同时,其控制方法在军工、航天、机器人和一般工业过程领域中都有着广泛的用途,如机器人行走过程中的平衡控制、火箭发射中的垂直度控制和卫星飞行中的姿态控制等。
4. 设计任务(1)建立直线型一级倒立摆系统的状态空间表达式。
(2)对该系统的稳定性、能观性、能控性进行分析。
(3)应用极点配置法对该直线型一级倒立摆系统进行控制器设计。
(4)使用MATLAB/simulink软件验证设计结果目录设计目的........................................................................................... 2-4设计要求:. (4)系统说明:....................................................................................... 4-5设计任务........................................................................................... 5-8运行结果......................................................................................... 8-11收获与体会.. (10)参考文献 (12)1. 设计目的(1)熟悉直线型一级倒立摆系统倒立摆控制系统是一个复杂的、不稳定的、非线性系统,对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要:为实现多输入、多输出、高度非线不稳定的倒立摆系统平衡稳定控制,将倒立摆系统的非线性模型进行近似线性化处理,获得系统在平衡点附近的线性化模型。
利用牛顿—欧拉方法建立直线型一级倒立摆系统的数学模型。
在分析的基础上,基于状态反馈控制中极点配置法对直线型倒立摆系统设计控制器。
由MATLAB仿真表明采用的控制策略是有效的,设计的控制器对直线型一级倒立摆系统的平衡稳定性效果好,提高了系统的干扰能力。
关键词:倒立摆、极点配置、MATLAB仿真引言:倒立摆是进行控制理论研究的典型试验平台,由于倒立摆本身所具有的高阶次、不稳定、非线性和强耦合性,许多现代控制理论的研究人员一直将他视为典型的研究对象,不断从中发掘出新的控制策略和控制方法。
控制器的设计是倒立摆系统的核心内容,因为倒立摆是一个绝对不稳定的系统,为使其保持稳定并且可以承受一定的干扰,基于极点配置法给直线型一级倒立摆系统设计控制器1.数学模型的建立倒立摆系统其本身是自不稳定的系统,实验建模存在着一定的困难。
在忽略掉一些次要的因素之后,倒立摆系统就是一典型的运动的刚体系统,可以在惯性坐标系中应用经典力学理论建立系统动力学方程。
下面采用牛顿-欧拉方法建立直线型一级倒立摆系统的数学模型。
1.1微分方程的数学模型在忽略了空气阻力和各种摩擦力之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如图1所示:图1:直线一级倒立摆模型设系统的相关参数定义如下:M:小车质量m:摆杆质量b:小车摩擦系数l:摆杆转动轴心到杆质心的长度I:摆杆质量F:加在小车上的力x:小车位置Φ:摆杆与垂直方向上方向的夹角θ:摆杆与垂直方向下方向的夹角(摆杆的初始位置为竖直向下)如下图2所示为小车和摆杆的受力分析图。
其中,N和P为小车与摆杆相互作用力的水平和垂直方向的分量。
图2:小车和摆杆受力分析图应用牛顿方法来建立系统的动力学方程过程如下: 分析小车水平方向所受的合力,可以得到以下的方程:M x F b x N ••=--由摆杆水平方向的受力进行分析可以得到下面的等式:22(sin )d N m x l dtθ=+将此等式代入上述等式中,可以得到系统的第一个运动方程:2()cos sin M m x b x ml ml F θθθθ••••••+++-=为了推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析,可以得到下面的方程:22(cos )d P mg m l dtθ-=-力矩平衡方程如下:sin cos Pl Nl I θθθ••--=注意:此方程中力矩的方向,由于cos cos sin sin θπφφθφθ=+=-=- 故等式前面有负号。
合并这两个方程,约去P 和N ,得到第二个运动方程:2()sin cos I ml mgl ml x θθθ••••++=-设θ=π+φ,当摆杆与垂直向上方向之间的夹角φ与1(单位是弧度)相比很小时,即Φ<<1时,则可以进行如下近似处理:2cos 1sin ()0d dtθθφθ=-=-= 线性化后得到该系统数学模型的微分方程表达式:2()()I ml mgl ml xM m x b x ml uφφφ••••••••⎧+-=⎪⎨⎪++-=⎩1.2状态空间数学模型控制系统的状态空间方程可写成如下形式:X AX Bu Y CX Du•=+=+ 解代数方程可得如下解:2222222222()()()()()()()()()x xI ml b m gl I ml x x u I M m Mml I M m Mml I M m Mml mlb mgl M m ml x u I M m Mml I M m Mml I M m Mml φφφφφ••••••••••⎧=⎪⎪-++=++⎪++++++⎪⎨⎪=⎪-+⎪=++⎪++++++⎩整理后可得系统的状态空间方程:22222222220100()00()()()00010()00()()()x x I ml bm gl I ml x x I M m Mml I M m Mml I M m Mml mlbmgl M m ml I M m Mml I M m Mml I M m Mml φφφφ••••••••⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥-++⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥++++++⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-+⎢⎥⎢⎥⎣⎦⎢⎥⎢⎢⎥⎣⎦++++++⎣⎦⎣⎦u ⎥1000000100x x x y u φφφ••⎡⎤⎢⎥⎢⎥⎡⎤⎡⎤⎡⎤==+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎢⎥⎢⎥⎣⎦对于质量均匀分布的摆杆,其转动惯量为:213I ml = 代入微分方程模型中得:221()3ml ml mgl ml x φφ••••+-= 化简后可得:3344g x l lφφ••••=+设[],TX x x u x φφ••••==则有:'010000000100010330441000000100x x x x u g l l x x x y u φφφφφφφ••••••••••⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦⎡⎤⎢⎥⎢⎥⎡⎤⎡⎤⎡⎤==+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎢⎥⎢⎥⎣⎦1.3实际系统模型实际系统参数如下: M :小车质量,0.5Kg; m :摆杆质量,0.2Kg;b :小车摩擦系数,0.1N/m/sec ; l :摆杆转动轴心到杆质心的长度,0.3m; I :摆杆质量,0.006Kg ·m ·m ; T :采样时间,0.005s 。
将上述系统参数代入可得系统实际模型。
摆杆角度和小车位移的传递函数:22()0.06()0.0240.588s s X s s φ=-摆杆角度和小车加速度之间的传递函数:2()0.06()0.0240.588s V s s φ=-摆杆角度和小车所受外界作用力的传递函数:2432()4.545()0.18231.18 4.45s s U s s s s sφ=+-- 以外界作用力作为输入的系统状态方程:100000.182 2.67270 1.81820001000.454531.1820 4.5454x x x x u φφφφ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦1000000100x x x y u φφφ⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤⎢⎥==+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦以小车加速度作为输入的系统状态方程:'010000001000100024.50 2.5x x x x u φφφφ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦'1000000100x x x y u φφφ⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤⎢⎥==+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦2.状态空间极点配置经典控制理论的研究对象主要是单输入单输出的系统,控制器设计时一般需要有关被控对象的较精确模型,现代控制理论主要是依据现代数学工具,将经典控制理论的概念扩展到多输入多输出系统。
极点配置法通过设计状态反馈控制器将多变量系统的闭环系统极点配置在期望的位置上,从而使系统满足瞬态和稳态性能指标。
设计要求:用极点配置方法设计控制器,使得在小车上施加0.1N 的阶跃信号时,闭环系统的响应指标为: (1)要求系统调整时间小于3s (2)稳态时摆杆与垂直方向的夹角变化小于0.1弧度 状态方程为:X AX Bu •=+选择控制信号:u KX =-可解得:()()()x t A BK x t •=-直接利用MATLAB 极点配置函数[K ,PREC ,MESSAGE]=PLACE(A ,B ,P)来计算。
选取调整时间ts=2.0s ,阻尼比为ξ=0.5,可得期望的闭环极点:1233101022u u u j u j =-=-=-+=-- u 3,u 4为一对主导极点,u 1,u 2距离闭环主导极点5倍,可忽略其对主导极点的影响。
矩阵(A-BK )的特征值是方程式| Is-(A-BK )|=0的根:00001000000000011234000000001000000s s k k k k s b s a ⎡⎤⎡⎤⎢⎥⎢⎥⎡⎤⎢⎥⎢⎥⎢⎥⎡⎤⎢⎥⎢⎥⎢⎥-+⨯=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦⎣⎦这是 s 的四次代数方程式,可表示为432241321()()0s k bk s a k bk s ak s ak +++-+++-=适当选择反馈系数 k1 , k2,k 3,k 4 系统的特征根可以取得所希望的值。
把四个特征根1234,,,λλλλ设为四次代数方程式的根,则有43212341223344113241232341344121234()()()0s s s s λλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλ-+++++++++-++++=如果给出的1234,,,λλλλ 是实数或共轭复数,则联立方程式的右边全部为实数。
据此可求解出实数k1,k2,k3,k4 当将特征根指定为下列两组共轭复数时1234,,,λλλλ= 2-±,-10, -10又a = 29.4, b = 3利用方程式可列出关于k1,k2,k3,k4的方程组:24132132429.4319629.472029.41600k k k k k k +=-++=-=-=求解后得 k1=-65.3061 k2=-29.3878 k3=114.3224 k4=21.3551所以反馈矩阵:[65.306129.3878114.322421.3551]K =--即施加在小车水平方向的控制力 u :μ = −KX = -65.3061x + -29.3878x - 114.3224φ -21.3551φ3.仿真验证图3:倒立摆极点配置仿真框图可以看出在干扰的情况下,系统在3s之内基本上可以恢复到新的平衡位置。
图4:直线一级倒立摆状态空间极点配置MA TALAB SIMULINK仿真结果图图5:直线一级倒立摆状态空间极点配置实时控制结果(施加干扰)在给倒立摆施加干扰后,系统的响应如图12所示,系统的稳定时间在3s之内,达到设计要求。
4.结论传统的非线性系统分析方法需要非线性系统的精确模型,而实际中存在的大量复杂的多变量非线性系统则表现为参数的不确定性和结构的不确定性。
本文用现代控制理论的极点配置方法对直线一级倒立摆控制进行了分析,并用Simulink进行了倒立摆的系统仿真。