系统辨识基础实验指导书
系统辨识基础 第一讲要点

《系统辨识基础》第1讲要点●引言课程名称:系统辨识基础Fundamentals of System Identification辨识(Identification)?(1) 辨识是研究建立系统或生产过程数学模型的一种理论和方法。
(2) 辨识是种从含有噪声的测量数据中提取被研究对象数学模型的一种统计方法。
(3) 辨识模型是对象输入输出特性在某种准则意义下的一种近似。
近似的程度取决于人们对系统先验知识的认识和对数据集性质的了解程度,以及所选用的辨识方法是否合理。
(4) 辨识技术帮助人们在表征被研究的对象、现象或系统、过程的复杂因果关系时,尽可能准确地确立它们之间的定量依存关系。
(5) 辨识是一种实验统计的建模方法。
●课程内容Part I 理论教学(课内48学时)第1章辨识的一些基本概念(3讲)内容:系统和模型概念、建模方法、辨识定义、辨识问题的表达形式、辨识算法的基本原理、误差准则、辨识的内容和步骤、辨识的应用。
参考书:《过程辨识》§1.1-§1.8第2章随机信号的描述与分析(3讲)内容:随机过程的基本知识、相关函数、协方差函数、谱密度函数、线性过程在随机输入下的响应、白噪声及其产生方法、M序列及其性质。
参考书:《过程辨识》§2.1-§2.3,§2.5-§2.6第3章过程的数学描述(1讲)内容:连续系统的输入输出模型、离散系统的输入输出模型、数学模型之间的等价变换、噪声模型及其分类。
参考书:《过程辨识》§3.1,§3.3-§3.4第4章经典的辨识方法(4讲)内容:Levy法、相关分析法、实验一辅导。
参考书:《过程辨识》§4.1,§4.4-§4.5第5章最小二乘参数辨识方法(7讲)内容:最小二乘法的基本概念、最小二乘问题的提法、最小二乘问题的解、最小二乘参数估计的收敛性、最小二乘参数估计的几何解析、最小二乘参数估计的统计性质、最小二乘参数估计的递推算法、最小二乘递推算法的几种变形。
系统辨识实验1实验报告
实验报告--实验1.基于matlab的4阶系统辨识实验课程:系统辨识题目:基于matlab的4阶系统辨识实验作者:专业:自动化学号:11351014目录实验报告 (1)1.引言 (2)2.实验方法和步骤 (2)3.实验数据和结果 (2)4.实验分析 (4)1、 引言系统辨识是研究如何确定系统的数学模型及其参数的理论。
而模型化是进行系统分析、仿真、设计、预测、控制和决策的前提和基础。
本次实验利用matlab 工具对一个简单的4阶系统进行辨识,以此熟悉系统辨识的基本步骤,和matlab 里的一些系统辨识常用工具箱和函数。
这次实验所采取的基本方法是对系统输入两个特定的激励信号,分别反映系统的动态特性和稳态特性。
通过对输入和输出两个系统信号的比较,来验证系统的正确性。
2、 实验方法和步骤2.1 实验方法利用matlab 对一个系统进行辨识,选取的输入信号必须能够反映系统的动态和稳态两个方面的特性,才能更好地确定系统的参数。
本次实验采取了两种输入信号,为反映动态特性,第一个选的是正弦扫频信号,由下面公式产生:选定频率范围 ,w(t)是时间t 的线性函数,具有扫频性质,可以反映系统的动态特性。
为反映稳态特性,选的输入信号是阶跃信号。
以上的到两组数据,利用matlab 的merge()函数,对两组数据融合,然后用matlab 系统辨识工具箱中的基于子空间方法的状态空间模型辨识函数n4sid()来对系统进行辨识2.2 实验步骤(1)建立一个4阶的线性系统,作为被辨识的系统,传递函数为3243211548765()125410865s s s G s s s s s -+-+=++++(2)产生扫频信号u1和阶跃信号u2(3)u1、u2作为输入对系统进行激励,分别产生输出y1和y2 (4)画出稳态测试输入信号u1-t 的曲线,和y1-t 的曲线 画出动态测试输入信号u2-t 的曲线,和y2-t 的曲线(5)使用merge()函数对u1-y1数据和u2-y2数据进行融合,并使用n4sid()函数对系统进行辨识。
系统辨识实验
实验一:系统辨识的经典方法实验目的:掌握系统的数学模型与系统的输入、输出信号之间的关系,掌握经典辨识的实验测试方法和数据处理方法。
熟悉MATLAB/Simulink环境。
实验内容:1.用阶跃响应发测试给定系统的数学模型在系统没有噪声干扰的条件下通过测试系统的阶跃响应获得系统的一阶加纯滞后或者二阶加纯滞后模型,对模型进行验证。
2.在被辨识系统中加入噪声干扰,重复上述1的实验过程。
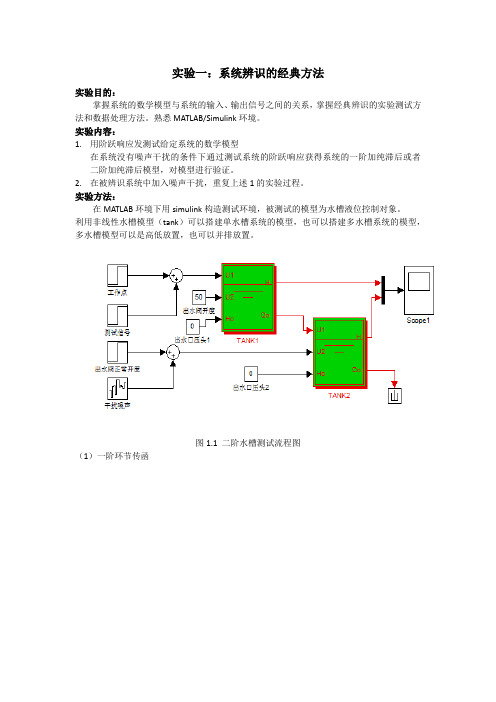
实验方法:在MATLAB环境下用simulink构造测试环境,被测试的模型为水槽液位控制对象。
利用非线性水槽模型(tank)可以搭建单水槽系统的模型,也可以搭建多水槽系统的模型,多水槽模型可以是高低放置,也可以并排放置。
图1.1 二阶水槽测试流程图(1)一阶环节传函利用两点法,找到 , 的点,对应得到 , ; 运用公式得到所以确定(2)二阶环节传函确定找到 , 的点,对应得到 , ;运用公式求的所以确定思考题1()=0.39y t 2()=0.63y t 122=2 1.1-2.3=-0.1t t τ=-⨯212()T t t =-1=1.1t 2=2.3t 122t t τ=-212()=2(2.3 1.1) 2.4T t t =-⨯-=()y y 27.1K ==2.71u u 10∞∆==∆∆1()=0.4y t=9.1t20.909T =1 2.121T =()y y 26.6K ==2.66u u 10∞∆==∆∆实验二相关分析法实验目的:掌握相关分析法测试系统数学模型的过程和方法。
掌握应用移位计数器设计M序列信号发生器的方法。
实验内容:1.设计并实现PRBS伪随机序列信号(M序列)发生器;2.应用相关分析法测试给定系统的数学模型。
使用伪随机序列信号测试系统在有噪声情况下的输出,用相关分析法辨识系统的数学模型。
3.模型验证。
实验方法:测试对象可以与实验一相同。
应用MATLAB/Simulink设计PRBS伪随机信号(M序列)发生器,可以用JK触发器构造的移位计数器实现,也可以用程序实现。
系统辨识实验二

《系统辨识》实验二要点实验二 递推最小二乘估计(RLS)及模型阶次辨识(F-Test )一、实验目的① 通过实验,掌握递推最小二乘参数辨识方法 ② 通过实验,掌握F-Test 模型阶次辨识方法二、实验内容1、仿真模型实验所用的仿真模型如下: 框图表示模型表示)()2(5.0)1()2(7.0)1(5.1)(k v k u k u k z k z k z λ+-+-=-+-- 其中u (k )和z (k )分别为模型的输入和输出变量;v (k )为零均值、方差为1、服从正态分布的白噪声;λ为噪声的标准差(实验时,可取0.0、0.1、0.5、1.0);输入变量u (k )采用M 序列,其特征多项式取1)(4⊕⊕=s s s F ,幅度取1.0。
2、辨识模型辨识模型的形式取)()()()()(11k e k u z B k z z A +=--为方便起见,取n n n b a ==,即nn nn zb z b z b z B z a z a z a z A ------+++=++++= 22112211)(1)(根据仿真模型生成的数据{}L k k u ,,1),( =和{}L k k z ,,1),( =,辨识模型的参数n n b b b a a a ,,,,,,2121 和;并确定模型阶次n ,同时估计出模型误差)(k e 的方差(应近似等于模型噪声)(k v 的方差,即为2λ)和模型的静态增益K 。
3、辨识算法① 采用递推遗忘因子法:[][][]⎪⎪⎩⎪⎪⎨⎧--=+--=--+-=-)1()()(1)()()1()()()1()()1()()()()1()(1k k k μk μk k k k k k k k k z k k k P h K I P h P h h P K h K τττθθθ 其中,遗忘因子10≤<μ(具体值根据情况自已确定);数据长度L 可取100、300、500;初始值⎩⎨⎧==IP 2)0()0(a εθ。
系统辨识实验报告30288
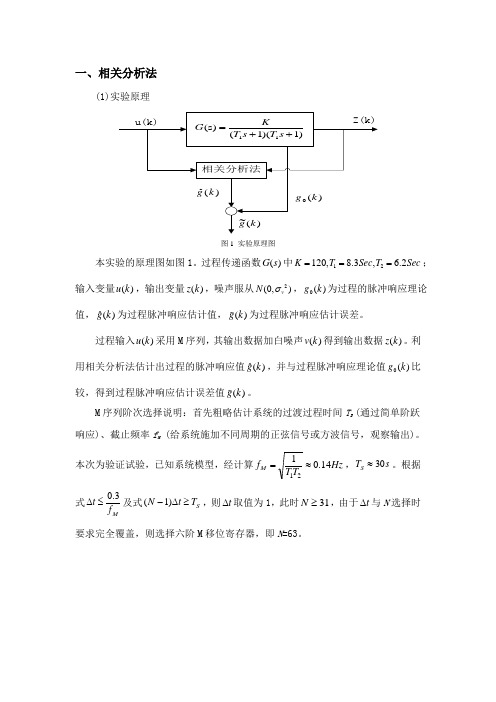
一、相关分析法(1)实验原理图1 实验原理图本实验的原理图如图1。
过程传递函数()G s 中12120,8.3, 6.2K T Sec T Sec ===;输入变量()u k ,输出变量()z k ,噪声服从2(0,)v N σ,0()g k 为过程的脉冲响应理论值,ˆ()gk 为过程脉冲响应估计值,()g k 为过程脉冲响应估计误差。
过程输入()u k 采用M 序列,其输出数据加白噪声()v k 得到输出数据()z k 。
利用相关分析法估计出过程的脉冲响应值ˆ()gk ,并与过程脉冲响应理论值0()g k 比较,得到过程脉冲响应估计误差值()g k 。
M 序列阶次选择说明:首先粗略估计系统的过渡过程时间T S (通过简单阶跃响应)、截止频率f M (给系统施加不同周期的正弦信号或方波信号,观察输出)。
本次为验证试验,已知系统模型,经计算Hz T T f M 14.0121≈=,s T S 30≈。
根据式Mf t 3.0≤∆及式S T t N ≥∆-)1(,则t ∆取值为1,此时31≥N ,由于t ∆与N 选择时要求完全覆盖,则选择六阶M 移位寄存器,即N =63。
(2)编程说明图2 程序流程图(3)分步说明 ① 生成M 序列:M 序列的循环周期63126=-=N ,时钟节拍1t Sec ∆=,幅度1a =,移位寄存器中第5、6位的内容按“模二相加”,反馈到第一位作为输入。
其中初始数据设为{1,0,1,0,0,0}。
程序如下:② 生成白噪声序列: 程序如下:③ 过程仿真得到输出数据:如图2所示的过程传递函数串联,可以写成形如121211()1/1/K Gs TT s T s T =++,其中112KK TT =。
图2 过程仿真方框图程序如下:④ 计算脉冲响应估计值:互相关函数采用公式)()(1)(10k i y i x Nr k R N r i xy +⋅⋅=∑-⋅=,互相关函数所用的数据是从第二个周期开始的,其中r 为周期数,取1-3之间。
系统辨识实验报告

系统辨识实验报告自动化0903班09051302 李姣实验一、系统辨识的经典方法系统的模块如图:(1)、对系统的传递函数进行辨识。
对于一阶系统而言,未加入干扰信号时,其稳定值 t0=20.0,h0=42.2040, 加入干扰信号后其稳定值为 t=40,h1=60.4937。
现在分别取两个点为y1=30%对应的实际点为 h1’=42.2040+(60.4937-42.2040)*30%=47.6909; 根据实际测试值,选取h1’=47.8909,t1’=20.6,对应的 y1’=(47.89*09-42.2040)/(60.4939-42.2040)=0.3109 所以第一个点的取值为 y1’=0.3109;t1’=0.6; 同理可得第二个点的数值为 y2’=0.8033;t2’=2.7; 由公式 :可得 T=1.6750;=0; 由公式可得 k=1.82899(2)、对传递函数进行检验下面对系统的辨识结果进行验证,用一个幅值为10的阶跃信号进行验证,程序如下: num=[1.82899]; den=[1.675,1];()()()()()()2112211212t t T ln 1Y ln 1Y t ln 1Y t ln 1Y ln 1Y ln 1Y -⎧=⎪---⎪⎨---⎪τ=⎪---⎩()y y K u u∞∆==∆∆t=[0:0.1:10];[y,x,t]=step(num,den,t);plot(t,10*y)grid on;title('一阶系统模型的验证');xlabel('仿真时间');ylabel('系统的响应值');set(gca,'xtick',[0:0.5:10]);set(gca,'ytick',[0:1:20]);所得的仿真图形如下,实际系统加入测试信号后0.5s,从workspace中可发现系统的响应值为h=47.0929-42.2040=4.8889;验证是的对应仿真值为h’=4.4720;其误差大小为:(4.8889-4.4720)/4.8889*100%=8.536%;同理,当仿真时间为3.8s时,h=16.3993;h’=16.398;误差大小为:(16.3993-16.398)/16.3993*100%=0.08%;所以经过验证个,可以确定该辨识结果可以反应该系统的传递函数。
系统辨识课程教学大纲
本科生课程大纲课程属性:公共基础/通识教育/学科基础/专业知识/工作技能,课程性质:必修、选修一、课程介绍1.课程描述:本课程主要培养学生综合运用自动控制理论和方法解决工程实践中的模式识别、参数辨识等问题的能力,使学生掌握利用观测数据建立系统数学模型的一些基本方法,为建立系统数学模型提供现代处理手段。
要求学生掌握系统辨识的基本概念和基本原理,灵活运用经典的系统辨识方法解决实际问题,并要求学生完成基于实际背景的综合性作业并能利用计算机编程完成仿真计算。
2.设计思路:依照教育部高等学校电子信息与电气学科教学指导委员会与自动化专业教学指导分委员会在2010年12月颁布的《普通高校自动化专业规范》,系统辨识是自动化专业基础知识的重要部分。
依照该规范,同时也结合自动化专业设置的自身特点,课程内容主要包括:系统辨识的基本概念、方法和步骤;经典的辨识算法;最小二乘类参数辨识方法;系统阶次的辨识;时间序列的建模分析基础;系统辨识的发展展望等内容。
3.课程与其他课程的关系:先修课程:信号与系统、现代控制理论、概率论、线性代数等;并行课程:计算机控制、控制系统仿真等。
本课程与信号与系统、自动控制原理、现代控制理论等构- 1 -成了控制理论课程群,内容和要求各有侧重、联系密切。
二、课程目标理解系统辨识的基本概念、方法和步骤。
掌握所需的数学知识:随机过程基础知识;白噪声序列;相关的矩阵知识。
掌握2种经典的辨识算法。
掌握基本最小二乘参数辨识方法及性质,能完成计算机仿真。
理解各种最小二乘类参数辨识递推算法的特点和适用范围。
理解模型检验的基本知识,掌握线性系统的阶次辨识的Hankel矩阵定阶方法和AIC 准则。
了解时间序列模型的动态特性;理解时间序列的建模方法。
了解系统辨识算法的新进展,并理解几种最优化方法的思想及其在参数辨识中的应用。
三、学习要求要完成所有的课程任务,学生必须:(1)按时上课,上课认真听讲,积极参与课堂讨论、随堂练习和测试。
系统辨识实验报告1
14
四.实验运行结果:
函数界面示意图: 6. 只显示结果界面: 7. 显示过程的参考界面:
15
心得体会
我很喜欢这个课程的期末考核方式,不用再拘泥于在题目当中对该课程的了 解,而是通过 4 个 C 语言设计的练习来达到学习的目的,而且对以后的学习还有 很大的帮助。
在编写 C 语言的过程中,也遇到了一些阻碍,特别是在编写第 3,4 个的时候。 比如:用的数组太多,并且未将其初始化,运行出来的结果经常是很长的一段随 机数;或者一模一样的程序有时候就可以正常运行,有时候就总是出现报错…… 这些都是让我心塞了两周的问题。在这些问题解决之后,运行出来的结果却与实 际模型参数的出入有点大,于是又重新查找第 2 个实验是否是 M 序列产生的方式 有问题。通过对初始化寄存器赋给不同的值,可以让结果与真实模型参数之间的 误差达到最小。
实验 4 ................................................ 错误!未定义书签。 一.实验内容及要求: ............................... 错误!未定义书签。 二.实验原理: ..................................... 错误!未定义书签。 三.数据递推关系图: ............................... 错误!未定义书签。
编写并调试动态离散时间模型 LS 成批算法程序。 要求:(1)原始数据由 DU 和 DY 读出。 (2)调用求逆及相乘子程序。 (3)显示参数辨识结果。
二.实验原理:
1.批次处理的方法就是把所有的数据采集到一次性进行处理,但前提是 白色噪声、及 M 序列所共同作用而产生的输出,才能使用最小二乘法。虽然 这种方法的计算量庞大,但经常用于处理时不变系统,方法简单。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验一 离散模型的参数辨识
一、实验目的
1. 掌握随机序列的产生方法。
2. 掌握最小二乘估计算法的基本原理。
3. 掌握最小二乘递推算法。
二、实验内容
1. 基于Box--Jinkins 模型模拟一个动态过程,动态过程取为各种不同的情况,输入信号采用M 序列,实验者可尝试不同周期的M 序列。
信噪比、观测数据长度也由实验者取为各种不同情况。
2. 模拟生成输入输出数据。
3. 根据仿真过程的噪声特性,选择一种模型参数估计算法,如RLS 、RIV 、RELS 、RGLS 、COR-LS 、STAA 、RML 或MLS 等,估计出模型的参数。
三、实验器材
计算机 1台
四、实验原理
最小二乘法是一种经典的有效的数据处理方法。
它是1795年高斯(K.F.Guass )在预测行星和彗星运动的轨道时提出并实际使用的。
最小二乘法也是一种根据实验数据进行参数估计的主要方法。
这种方法容易被理解,而且由于存在唯一解,所以也比较容易实现。
它在统计学文献中还被称为线性回归法,在某些辨识文献中还被称为方程误差法。
正如各个学科都用到系统辨识技术建立模型一样,最小二乘法也用于很多场合进行参数估计,虽然不一定是直接运用,但很多算法是以最小二乘为基础的。
在系统辨识和参数估计领域中,最小二乘法是一种最基本的估计方法。
它可用于动态系统,也可用于静态系统;可用于线性系统,也可用于非线性系统;可用于离线估计,也可用于在线估计。
在随机的环境下利用最小二乘法时,并不要求知道观测数据的概率统计信息,而用这种方法所获得的估计结果,却有相当好的统计性质。
在系统辨识和参数估计领域中,应用最广泛的估计方法是最小二乘法和极大似然法,而其他的大多数算法都与最小二乘法有关。
最小二乘法采用的模型为
11()()()()()A z y k B z u k e k --=+
最小二乘估计是在残差二乘方准则函数极小意义下的最优估计,即按照准则函数
ˆˆˆˆ()()min T T J e
e Y Y ΦθΦθ==--= 来确定估计值ˆθ。
求J 对ˆθ的偏导数并令其等于0,可得 ˆˆˆˆ()()()()0ˆˆT T T J Y Y Y Y ΦθΦθΦΦθΦΦθθ
θ∂∂=--=----=∂∂ 即ˆT T Y ΦΦθΦ=。
当T ΦΦ为非奇异,即Φ列满秩时,有1ˆ()T T LS
Y θΦΦΦ-=,此即参数的最小二乘估计值。
具体使用时不仅占用内存量大,而且不能用于在线辨识。
一次完成算法还有如下的缺陷:
(1)数据量越多,系统参数估计的精度就越高。
为了获得满意的辨识结果,矩阵T ΦΦ的阶数常常取得相当大。
这样,矩阵求逆的计算量很大,存储量也很大。
(2)每增加一次观测量,都必须重新计算1,()T ΦΦΦ-。
(3)如果出现Φ列相关,即不满秩的情况,T ΦΦ为病态矩阵,则不能得到最小二乘估计值。
解决这个问题的办法是把它化成递推算法。
依观测次序的递推算法就是每获得一次新的观测数据就修正一次参数估计值,随着时间的推移,便能获得满意的辨识结果。
递推辨识算法具有无矩阵求逆,以及跟踪时变系统等特点,这样不仅可以减少计算量和储存量,而且能实现在线辨识。
最小二乘估计递推算法(RLS )如下
1111ˆˆˆ[]T N N N N N N G y θθϕθ++++=+-
11111N N N T N N N P G P ϕϕϕ++++=+ 111T N N N N N P P G P ϕ+++=-
递推过程如下:
得到 11
ˆ,,,N N N N P u y θ++ 计算 111
ˆN N N P ϕθ+++→→→下一步递推 五、实验步骤
1.熟悉各种辨识方法的基本原理。
2.设计实验方案,编制实验程序,上机调试,记录结果。
3.分析实验结果,完成书面实验报告,提供程序框图及其说明,并总结各种辨识算法的优缺点。
六、实验思考题
1. 认真阅读教材中的相关内容,总结最小二乘估计算法和最小二乘递推算法的基本原理。
八、实验报告要求
1. 分析最小二乘估计算法和最小二乘递推算法的基本原理。
2. 记录产生的输入输出数据,根据最小二乘估计算法和最小二乘递推算法估计系统模型参数。
3. 完成相应的思考题
实验二 离散模型的阶次辨识
一、实验目的
掌握极大似然估计算法。
二、实验原理
极大似然法需要构造一个以数据和未知参数为自变量的似然函数,并通过极大化这个似然函数,获得模型的参数估计值。
已知参数θ的条件下,观测量的概率密度为(|)P Y θ,在N 次测量12{,,
,}N y y y 后(独立测量),考虑
似然函数
1211(,,, |) (, ,|)(|) N N N i i L y y y P y y P y θθθ===∏
如果不要求θ的分布密度,只要问θ的值为多少(最可能的值),那么,就只要求θ使12(,,,|)max N L y y y θ=。
对于确定了的观测值Y 而言,似然函数仅仅是参数θ的函数。
由极大似然原理
可知,ˆML
θ满足以下方程 ˆˆ0ˆML
L
θθθ=∂=∂
考虑到似然函数一般为指数函数,而指数函数和对数函数都是单调的,为方便求解,上式等价于如下方程
ˆˆln 0ˆML
L θθθ=∂=∂
三、实验内容及步骤
1.熟悉各种辨识方法的基本原理。
2.设计实验方案,编制实验程序,上机调试,记录结果。
3.分析实验结果,完成书面实验报告,提供程序框图及其说明,并总结各种辨识算法的优缺点。
四、实验报告
1.分析极大似然估计算法的基本原理。
2.记录产生的输入输出数据,根据极大似然估计算法估计系统模型参数。
3.完成相应的思考题。