2011计算机仿真大赛一等奖作品解析
2011年高教杯数学建模竞赛D题获奖论文 无锡职业技术学院
四.模型的建立与求解
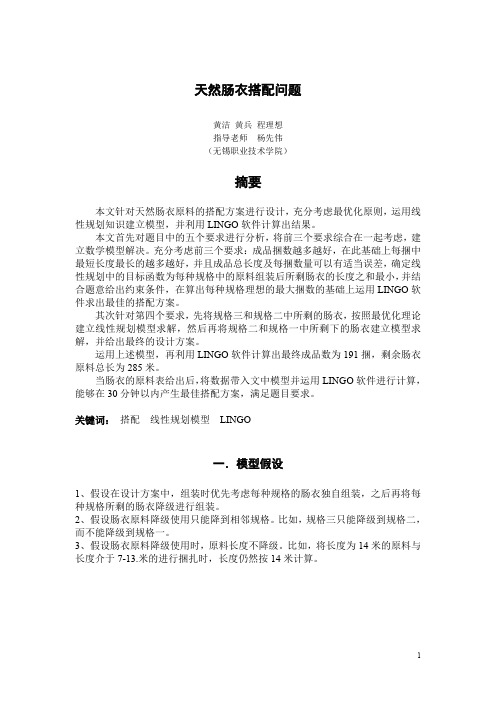
4.0 计算三种规格成品的理想最大捆数 根据题目要求(1) ,对于给定的原料,成品捆数越多越好;要求(3)每捆 成品总长度允许有 0.5 的误差。我们据此计算三种规格对应的理论最大捆数。 用每种规格肠衣的总长度除以每捆成品总长度的下限 88.5, 得出针对长度的 最大捆数;用每种规格肠衣的总根数除以对应规格每捆要求的数量 d k (k 1,2,3) , 得出针对根数的最大捆数;易知,理论最大捆数为两者中较小的一个,具体计算 公式为
10
10.5
11
11. 5 1 0 1 0 0 0 1 0 0 7 0
12
12. 5 0 1 0 0 3 4 0 0 1 0 4
13
13. 5 0 0 2 0 0 0 0 0 0 0 0
总 捆 数 8 8 8 8 8 8 8 8 8 8 8
第一捆 第二捆 第三捆 第四捆 第五捆 第六捆 第七捆 第八捆 第九捆 第十捆 第十一捆
每捆要求根数每捆要求总长度下限理论最大捆数规格一130552922088514规格二3705535488541规格三12159567788513541模型一分别设计三种规格原料的搭配方案结合要求12可知题目要求设计的搭配方案满足给定的一批原料装出的成品捆数越多越好且对于成品捆数相同的方案使得最短长度最长的成品最多经过分析可知该要求等价于对每种规格的肠衣应用搭配方案后所剩下的肠衣长度之和最小
代入数据后具体模型如下:
min y
n
j 1
a ij
b j x ij
i 1
m
B '2T AX T B2T 14 7 x 8, i 1,2, ,41. ij j 1 S .T . 41 x b , j 1,2, ,14. ij j i 1 1 m 41, m N
2011年数学建模竞赛获奖作品
承诺书我们仔细阅读了中国大学生数学建模竞赛的竞赛规则.我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。
我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。
如有违反竞赛规则的行为,我们将受到严肃处理。
我们参赛选择的题号是(从A/B/C/D中选择一项填写):我们的参赛报名号为(如果赛区设置报名号的话):所属学校(请填写完整的全名):参赛队员(打印并签名) :1.2.3.指导教师或指导教师组负责人(打印并签名):日期:年月日赛区评阅编号(由赛区组委会评阅前进行编号):2011高教社杯全国大学生数学建模竞赛编号专用页赛区评阅编号(由赛区组委会评阅前进行编号):全国统一编号(由赛区组委会送交全国前编号):全国评阅编号(由全国组委会评阅前进行编号):城市表层土壤重金属污染分析摘要随着城市工业快速发展和机动车的大量增加,重金属这个隐形杀手已经在不知不觉中渗透到生活中的每一个环节,侵蚀着我们的躯体。
近年来重金属污染事件屡见不鲜。
“城市表层土壤重金属”数学模型分析是对城市土壤环境异常的查证,以及确定重金属污染源位置,运用数学科学的理论和方法,在更好地利用自然资源的同时,深入认识重金属污染和破坏环境的根源及危害,预防环境质量恶化,控制城市表层土壤重金属污染污染来源,促进人类与环境协调发展,提高人类生活质量,保护人类健康,造福子孙后代,具有重要的意义。
对于问题一我们采用熟悉的0.7Matlab数学软件编程和Fisher模型解决。
对问题二我们采用数学统计法,用xcleMicrosoftE解决。
对问题三我们运用科学简化高斯扩散模型和修正的高斯模型进行解决。
对问题四我们采用收集更多的重金属污染数据对问题三所给模型做进一步修正解决。
2011年全国数学建模竞赛论文省一等奖(安徽赛区)

关于企业退休职工养老金收支平衡的研究孙善朋朱敬男潘小强一、摘要中国养老保险制度经历了20多年的发展历程,已经初步取得成效,随着社会的不断改革和发展,养老保险制度出现了一些值得深入研究的问题。
通过理论和实证研究这些问题,寻求其根源和解决方法,对改革和完善养老保险制度具有重要意义。
本文问题一以附件1“2009山东省职工历年平均工资数据”为依据,采用增长阻滞模型,用非线性最小二乘法进行拟合,预测出了从2011年至2035年山东省职工的年平均工资(单位:元):40060,45510,51640,58520,66230,74830,84390,95000,106710,119570,133640,148940,165470,183230,202170,222230,243310,265270,287960,311210,334800,358530,382180,405530,428380。
问题二根据附件2“2009年山东省某企业各年龄段工资分布表”,结合问题一中所预测的结果,用Matlab、Excel等软件计算了2009年该企业各年龄段职工工资与该企业平均工资之比分别为:0.669244,0.804936,0.982526,1.066681,1.172819,1.266639,1.208533,1.155055。
多种情况下的养老金替代率分别为:30.77%,33.81%,35.25%,19.34%,26.08%,32.97%。
问题三以该企业某职工为例,以问题一中得出的山东省职工历年平均工资平均增长率为依据,采用非线性拟合,计算和预测了该职工自30岁至65岁的历年工资情况,并给出了多种情况下的养老保险基金的缺口情况,求出了当养老保险基金与其领取的养老金之间达到收支平衡时该职工的年龄。
求得养老保险基金的缺口情况如下:30岁交纳养老保险,55岁退休时,缺口为国亏685790元;30岁交纳养老保险,60岁退休时,缺口为国亏831840元;30岁交纳养老保险,65岁退休时,缺口为国亏511950元。
2011年研究生数学建模竞赛优秀论文选-《吸波材料与微波暗室问题的数学建模》2-38页

二、模型的假设....................................................................................................... -3 -
2.1基本假设..................................................................................................... -3 -
通过分析三维反射发现,尖劈空缺中波线的三维反射和二维反射之间有明确的关系。这种关系由三维入射角和反射次数决定,而反射次数可以通过二维模型得到,据此将平面反射模型扩展为三维反射模型,从而得到尖劈形状吸波体的三维反射模型。
(2)问题二:在天线微波的辐射下,暗室墙上的每一点都会成为一个被动微波辐射源,每一点反射出的微波又会辐射到其他点上。基于此现象,本文建立了暗室——天线系统的微波辐射耦合模型。这种模型借鉴了有限元的思想,
首先将墙面划分成若干个区域,其中每个区域都可能受到其他区域和天线的辐射;然后,根据每个区域的入射通量与反射通量之间的关系建立暗室——天线系统的耦合方程组,方程组中的未知量为各个区域的反射通量;最后采用超松弛迭代法(SOR)求解该方程组,得到墙面各区域的反射通量,进而求得静区接收到的来自墙面反射的功率,获得静区从信号源直接得到的微波功率之后, 即可得到二者之比。最终建立了导弹导引仿真实验用的微波暗室的性能研究模型。同时,建模过程中的数值试验表明,模型误差随着网格细化而快速收敛, 据此确定了最终使用的网格密度,数值试验还验证了墙面耗散微波的功率等于天线发射微波的功率。
参赛密码
(由组委会填写)
全国第八届研究生数学建模竞赛
2011全国大学生数学建模竞赛B题参考答案

一问题的重述110警车在街道上巡逻,既能够对违法犯罪分子起到震慑作用,降低犯罪率,又能够增加市民的安全感,同时也加快了接处警时间,提高了反应时效,为社会和谐提供了有力的保障。
现给出某城市内一区域,其道路数据和地图数据已知,该区域内三个重点部位的坐标分别为:(5112,4806),(9126, 4266),(7434 ,1332)。
该区域内共有307个道路交叉口,为简化问题,相邻两个交叉路口之间的道路近似认为是直线,且所有事发现场均在下图的道路上。
该市拟增加一批配备有GPS卫星定位系统及先进通讯设备的110警车。
设110警车的平均巡逻速度为20km/h,接警后的平均行驶速度为40km/h。
警车配置及巡逻方案要尽量满足以下要求:D1. 警车在接警后三分钟内赶到现场的比例不低于90%;而赶到重点部位的时间必须在两分钟之内。
D2. 使巡逻效果更显著;D3. 警车巡逻规律应有一定的隐蔽性。
现在我们需要解决以下几个问题:一. 若要求满足D1,该区最少需要配置多少辆警车巡逻?二. 请给出评价巡逻效果显著程度的有关指标。
三.请给出满足D1且尽量满足D2条件的警车巡逻方案及其评价指标值。
四. 在第三问的基础上,再考虑D3条件,给出你们的警车巡逻方案及其评价指标值。
五.如果该区域仅配置10辆警车,应如何制定巡逻方案,使D1、D2尽量得到满足?六. 若警车接警后的平均行驶速度提高到50km/h,回答问题三。
七. 你们认为还有哪些因素、哪些情况需要考虑?给出你们相应的解决方案。
二问题分析本题为城区道路网络中警车配置及巡逻问题。
在进行警车配置时,首先要考虑警车在接警后在规定时间内赶到现场的比例,在此条件下,以车数最少为目标,建模、求解;在制定巡逻方案时,要考虑巡逻的效果及隐蔽性问题。
问题一只要求满足D1,求最少的警车配置数,可以认为警车是不动的,在三分钟或两分钟内它能到达的区域就是它的覆盖范围。
据此,在满足所有街道的覆盖率不低于90%的条件下,寻找最优解。
2011年美国数学建模大赛一等奖获奖论文

Team #10076
Page 2 of 21
Contents
1 Introduction 2 Restatement of Problem 3 Basic Assumptions 4 Analysis of the Problem 4.1 Definitions of Zero-Potential Surface and “vertical 4.2 Turn Of Snowboarding . . . . . . . . . . . . . . . 4.3 Snowboarding on the Deck . . . . . . . . . . . . . 4.4 Snowboarding on the Quarter Arc . . . . . . . . . 5 “Vertical air” Model 6 Results and Sensitivity Analysis 6.1 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.2 Sensitivity Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 Model Applications And Analysis 7.1 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.2 Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 Maximum Twist Model 8.1 Analysis of Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.2 Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.3 Results and Sensitivity Analysis . . . . . . . . . . . . . . . . . . . . . . . 9 Tradeoffs to Develop a ”Practical” Course 9.1 Halfpipe Framework . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.2 Snow in the Halfpipe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3 4 6 6 7 10 10 14 16 16 16 17 17 17 18 18 18 19 20 20 20
2011年数学建模大赛b题matlab编程

2011年数学建模大赛b题matlab编程(原创实用版)目录一、2011 年数学建模大赛 B 题概述二、Matlab 编程在解决该问题中的应用三、具体建模过程及 Matlab 编程实现四、总结正文一、2011 年数学建模大赛 B 题概述2011 年数学建模大赛 B 题是一道涉及运筹学、图论和最优化理论的复杂题目,要求参赛选手针对给定的问题进行数学建模,并利用计算机编程求解。
此题对选手的数学基础、编程能力和创新思维都提出了较高的要求。
二、Matlab 编程在解决该问题中的应用Matlab 是一种广泛应用于科学计算、数据分析和可视化的编程语言,具有丰富的函数库和强大的矩阵计算能力。
在解决 2011 年数学建模大赛B 题时,Matlab 编程在以下几个方面发挥了关键作用:1.数据处理与分析:Matlab 可以方便地对数据进行预处理,如清洗、转换和整理,以便更好地进行后续建模分析。
2.建立数学模型:通过 Matlab 编程,可以快速地搭建和调整数学模型,以找到最合适的解决方案。
3.求解最优化问题:Matlab 提供了丰富的最优化算法,如线性规划、整数规划和动态规划等,可以有效地解决各类最优化问题。
4.可视化分析:Matlab 可以方便地绘制各类图表,直观地展示分析结果,有助于更好地理解问题和优化解决方案。
三、具体建模过程及 Matlab 编程实现具体建模过程分为以下几个步骤:1.阅读题目,理解问题背景和需求。
2.收集和整理数据,进行预处理。
3.建立数学模型,包括确定变量、目标函数和约束条件。
4.编写 Matlab 程序,实现模型求解。
5.分析结果,检验模型的有效性和可行性。
6.根据分析结果调整模型和算法,直至找到最优解。
四、总结2011 年数学建模大赛 B 题的解决过程充分展示了 Matlab 编程在数学建模中的重要作用。
通过熟练掌握 Matlab 编程技术,可以有效地解决各类实际问题,提高数学建模的效率和质量。
2011年浙江省数学建模竞赛论文A题 一等奖

城市表层土壤重金属污染分析摘要工业污染物质和生活垃圾的大量输入以及长期使用化肥、农药、污水灌溉等,容易导致重金属元素的蓄积,进而造成土壤重金属的污染。
土壤重金属的污染影响土壤的生态功能,影响植物的生长、农产品的质量,并且通过食物链传递和土壤颗粒物的直接吸入而影响人体健康;土壤重金属污染具有隐蔽性、长期性和不可逆性的特点,越来越受关注。
对于本问题我们主要运用SPSS软件对数据进行处理,从而建立经验模型,研究该城市不同功能区的表层土壤重金属含量特征,计算8种重金属元素的单项污染指数,并成功解决了问题。
针对问题一,我们运用SPSS软件,定制关于x,y,海拔,各元素单项污染指数报表,通过观察和分析报表,得出重金属元素的空间分布;对于污染程度的分析,我们绘制以功能区为x轴、各重金属元素的平均污染指数为y轴的分组条形图,并且对不同功能区的各元素的污染指数制定表格,从图形和表格中准确分析不同区域重金属的污染程度。
针对问题二,我们通过网上大量搜寻8种重金属元素的产生原因、特性、存在状态,及土壤母质的相关属性,绘制了8种重金属元素含量在不同功能区的饼图,说明重金属污染的主要原因。
针对问题三,我们结合问题一和问题二,对各重金属元素的迁移转化进行研究,综合得到重金属污染物的传播特征;建立经验模型,对于x,y和各元素的综合污染指数定制报表,统计出各元素污染情况严重的区域,进而得出各元素的污染源。
本模型优点在于直观和可操作性强。
针对问题四,我们的模型采用经验模型,适用于大范围内长时段重金属转移,对资料依赖性较强,无法阐明重金属迁移与污染源的复杂关系。
因此,需要我们收集该地区土壤的酸碱度PH、降雨量、土壤母质这些相关信息,通过分析,预测模型,从而解决问题。
关键词:SPSS软件平均污染指数经验模型预测模型随着城市经济的快速发展和城市人口的不断增加,人类活动对城市环境质量的影响日显突出。
对城市土壤地质环境异常的查证,以及如何应用查证获得的海量数据资料开展城市环境质量评价,研究人类活动影响下城市地质环境的演变模式,日益成为人们关注的焦点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
编号:重庆邮电大学第五届计算机仿真大赛一等奖作品题号: C组别:高年级组2011年 4 月 6 日单级移动式倒立摆动态控制仿真摘要单级移动式倒立摆系统是一个典型的单输入双输出的自然不稳定系统,具有非线性、强耦合、多变量、高阶次等特性,作为控制系统的被控对象,它是一个理想的教学实验设备,许多抽象的控制概念都可以通过倒立摆直观地表现出来。
应用上,倒立摆广泛应用于控制理论研究、航空航天控制、机器人、杂技项杆表演等领域,在自动化领域中具有重要的价值。
研究倒立摆的精确控制对工业生产中复杂对象的控制有着重要的应用价值,因此倒立摆仿真或实物控制实验是控制领域中用来检验某种控制理论或方法的典型方案。
许多抽象的控制概念如控制系统的稳定性、可控性、可观性、系统收敛速度和系统抗干扰能力等,都可以通过倒立摆系统直观的表现出来。
在控制过程中,它能有效地反映诸如可镇定性、鲁棒性、随动性以及跟踪等许多控制中的关键问题,是检验各种控制理论的理想模型。
因而其研究具有重大的理论和实践意义。
本文以单级移动式倒立摆为被控对象,参考古典控制理论设计控制器(如PID控制器)的设计方法和现代控制理论设计控制器(最优控制)的设计方法。
针对单级移动式倒立摆系统的单输入双输出、非线性、强耦合的不稳定性,我们采用线性二次最优LQR控制和PID控制,通过MATLAB软件进行实时控制(摆杆的角度和小车的位移)和系统仿真实验实现对小车位置和摆杆偏角的同时闭环控制,达到了预期效果(动态仿真)。
关键词:非线性倒立摆实时控制系统仿真动态1.问题重述单级移动式倒立摆原理如下图1-1 所示,图1-1其中小车质量M = 3KG;摆杆质量m = 0.1KG;摆杆为均匀的,质心l=0.5米;重力加速度g=9.81;设x1为摆杆角度,x2为摆杆角速度,x3为小车位移,x4为小车速度,其中小车水平受力为输入量,建立其状态方程:采用状态反馈进行控制,其控制原理如下图1-2 所示:图1-2计算得k1=-446.7287,k2= -91.0448,k3= -244.6376 ,k4=-110.0896 时系统稳定。
建立倒立摆控制仿真系统,当输入信号为阶跃信号和随机信号时,实时演示倒立摆的工作情况。
2.单级倒立摆模型的建立2.1 倒立摆概述单级倒立摆是一个自然不稳定系统,是处于倒置不稳定状态,人为控制使其处于动态平衡的一种摆,一般是由一个可以在水平轨道上自由移动的小车和倒置摆铰链而成,用一种强有力的控制方法对小车的速度作适当的控制,从而使全部摆杆倒置稳定于正上方,这个系统也叫自动平衡车。
悬挂式倒立摆系统开始工作时,首先使小车按摆杆的自由振荡频率摆动,摆杆随之大幅度摆动,当摆杆接近于倒立摆垂直位置时,自动转换控制方法,使其稳定于倒置状态。
随着倒立摆系统的控制研究的不断深入,倒立摆系统的种类也由简单的单线倒立摆发展为多种形式的倒立摆。
常见的倒立摆系统一般由小车和摆杆两部分构成(另有旋转式倒立摆等形式),其中摆杆可能是一级、两级甚至多级(级数越多,控制难度越大),其长度也可能是可变化的。
控制的目标一般都是通过给小车施加一个水平方向的力,使小车在期望位置上稳定,而摆杆达到竖直向上的动态平衡状态。
2.2 数学准备对系统建立数学模型是系统分析、设计的前提,而一个准确又简练的数学模型将大大简化后期的工作。
为了简化系统分析,在实际的模型建立过程中,要忽略空气流动阻力,以及各种次要的摩擦阻力。
这样,可将倒立摆系统抽象成小车和匀质刚性杆组成的系统,如下图所示。
本系统内部各相关参数定义如下:M 小车质量m 摆杆质量b 小车摩擦系数l 摆杆转动轴心到杆质心的长度22I 摆杆惯量f加在小车上的力x小车位置φ摆杆与垂直向上方向的夹角θ 摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下) 下图是系统中小车和摆杆的受力分析图。
其中, N 和 P 为小车与摆杆相互作用力 的水平和垂直方向的分量。
注意:在实际倒立摆系统中检测和执行装置的正负方向已经完全确定,因而矢量 方向定义如图,图示方向为矢量正方向。
应用 Newton 方法来建立系统的动力学方程过程如下: 分析小车水平方向所受的合力,可以得到以下方程:M x= f - bx - N由摆杆水平方向的受力进行分析可以得到下面等式:N = m d( x + l sin θ )dt 2即: N = m x+ ml θ cos θ - ml θ 2 sin θ把这个等式代入上式中,就得到系统的第一个运动方程:(M + m ) x+ bx + ml θ cos θ - ml θ 2 sin θ = F(2-1)为了推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析,可以 得到下面方程:P - mg = -m d(l cos θ )dt 2即: P - mg = ml θ sin θ + ml θ 2 cos θ力矩平衡方程如下:- Pl sin θ - Nl cos θ = I θ注意:此方程中力矩的方向,由于θ = π + φ , cos φ = - cos θ , s in φ = - s in θ ,故等式前面有负号。
合并这两个方程,约去 P 和 N ,得到第二个运动方程:(I + ml 2 )θ + mgl sin θ = -ml xcos θ (2-2)⎨ 222.3 模型建立2.3.1 微分方程建立设θ = π + φ ,当摆杆与垂直向上方向之间的夹角φ 与 1(单位是弧度)相比很小,即 φ << 1 时,则可以进行近似处理: cos θ = -1 , sin θ = -φ , ( d θ ) 2 = 0 。
为了与控dt制理论的表达习惯相统一,即u 一般表示控制量,用u 来代表被控对象的输入力 F ,线 性化后得到该系统数学模型的微分方程表达式:⎪⎧(I + ml 2 )φ- mgl φ = ml x ⎪⎩(M + m )x + bx - ml φ = u (2-3)2.3.2 传递函数建立对方程组(2-3)进行拉普拉斯变换,得到⎪⎧(I + ml 2 )Φ(s )s 2 - mgl Φ(s ) = mlX (s )s 2⎨ ⎪⎩(M + m ) X (s )s 2 + bX (s )s - ml Φ(s )s 2 = U (s )注意:推导传递函数时假设初始条件为 0。
由于输出为角度φ ,求解方程组(2-4)的第一个方程,可以得到(2-4)X (s ) = [ (I + ml ) - ml gΦ(s )s 2把上式代入方程组(2-4)的第二个方程,得到⎡ +2 ⎤ ⎡ 2 ⎤ (I (M + m )⎢ ml ) - g (I + ml ⎥Φ(s )s 2 + b ⎢ ) g - ⎥Φ(s )s - ml Φ(s )s 2 = U (s )⎣ ml s 2 ⎦ ⎣ mls 2 ⎦整理后得到以输入力u 为输入量,以摆杆摆角φ 为输出量的传递函数:ml s2G (s ) = Φ(s ) = qU (s ) s 4 + b ( I + m l ) s 3 - (M + m )mgl s 2 - b mgl sq q q其中q = [(M + m )(I + ml 2 ) - (ml ) 2 ]若取小车位移为输出量,可得传递函数:⎡ 0 1 0 0⎤⎢ M + m ⎢ g 0 0 ⎥ 0⎥0 0 1 0 0 1 00 0T 0]2 2 T( I + m l 2 ) mgls 2 -G (s ) = X (s ) = q q U (s ) s 4 + b ( I + m l ) s 3 - (M + m )mgl s 2 - b mgl sq q q2.4 状态空间模型2.4.1 状态空间模型的建立 状态空间模型的一般形式如下:x= Ax + Bfy = Cx + Df2.4.2 系统向量的设定设 x1 为摆杆角度,x2 为摆杆角速度,x3 为小车位移,x4 为小车速度Tx = ⎡⎣ x 1 x 2 x 3 x 4 ⎤⎦⎡10⎤⎢0 0⎥ A = ⎢Ml ⎥C = ⎢ ⎥ ⎢ 0 0 0 1⎥⎢0 0⎥⎢⎥ ⎢ - m g 0 0 0⎥ ⎢01⎥⎣⎢ M⎥⎦⎣ ⎦B = ⎡0 - 1 01 ⎤ D = [0 0 ⎣⎢ Ml M ⎥⎦2.4.3 系统的状态空间模型将上面的向量带入状态方程的一般形式,得到如下的状态方程:3.单级倒立摆模型性能分析3.1 系统能控性分析系统能控性就是研究系统的全部状态是否都会受到输入的影响,从而实现对系统状态的控制。
能控性体现了系统输入对状态的控制能力。
[1]根据系统能控性定义可知,系统完全能控的充分必要条件是:能控性矩阵W=⎡⎣A AB A n-1 B⎤⎦为行满秩。
c仿真程序:[2]n=length(A);Q=zeros(n);Q(:,1)=B;for i=2:n %按照公式Q=[B AB A^2*B....A^(n-1)*B]Q(:,i)=A*Q(:,i-1);endm=rank(Q);if(m==n)disp('该系统可控!');melsedisp('该系统不可控!');mend仿真结果:T仿真结果分析:图 3-1-1由仿真结果知,可控性矩阵的秩为 4,即为行满秩,故该系统具有可控性。
3.2 系统能观性分析 系统的能观性就是系统状态变量的任何运动完全可以由输出来反映。
能观性表征了输出对状态的反应能力。
[1] 根据系统能观性定义知,能观性完全能观的充分必要条件是:能观性矩阵W 0 = ⎡⎣C CACA n -1 ⎤⎦为列满秩。
仿真程序: V=obsv(A,C)%求能观性矩阵 rank(V)%求能观性矩阵的秩 仿真结果:图 3-2-1 由仿真结果知,可观性矩阵的秩为 4,即为为列满秩,故该系统具有可观性。
3.3 阶跃响应分析3.3.1 开环系统的阶跃响应仿真程序:%求解系统的特征值%p=eig(A)t1=0:0.01:1;step(A,B,C,D,1,t1) %阶跃响应仿真结果:图3-3-1 原系统阶跃响应曲线结果分析:由于特征方程有一个正实部的根,故系统不稳定。
3.3.2 闭环系统的阶跃响应加入反馈K=[-446.7287 -91.0448 -244.6376 -110.0896]后的阶跃响应仿真程序:% 带反馈 T1=0:0.01:5;u1=0.25*ones(size(T1));[Y,X]=lsim(A-B*K,B,C,D,u1,T1);plot(T1,Y(:,2));title('加反馈后系统的阶跃响应曲线');grid on仿真结果:图3-2-2仿真结果分析由图3-2-2 可知,系统的快速性很好,过渡过程时间不超过2.5 秒。