双电机驱动原理图
混合动力汽车双电机驱动系统分析

混合动力汽车双电机驱动系统分析1前言为了有效降低汽车燃油消耗量和尾气排放,满足双积分政策的要求,越来越多的汽车厂商进行推广和研发混合动力汽车。
混合动力汽车利用电池给电机提供动力来源,并通过电机来调节发动机的工作点,可以有效降低油耗和排放,进一步提高整车动力性和经济性[1-2]。
同时,混合动力汽车利用电机制动,借助新增零部件,可以进行有效的能量回收和能量管理,不同的混合动力系统构型方案可以实现不同的扭矩分配功能[3]。
在构型方案上,混合动力汽车可以采用单电机动力系统构型也可以采用双电机动力系统构型,而深混的混合动力系统多采用双电机构型,以便实现全部的混合动力功能,比如串联功能、并联功能和串并联混合功能等。
本文通过对两款典型的双电机系统车型进行技术分析,包括构型方案、系统功能及工作模式等,旨在为后续混合动力系统开发提供借鉴意义。
2本田i-MMD双电机系统构型本田雅阁i-MMD(IntelligentMulti-ModeDrive)系统技术方案结构如图1所示[4],其动力驱动系统主要包括2.0L发动机、驱动电机、发电机、离合器以及传动机构等。
其中,驱动电机、发电机以及离合器集成形成了电动耦合e-CVT,取代了传统的变速箱,发电机始终与发动机相连,主要用于发电,驱动电机与驱动车轮相连,主要用于驱动车辆行驶,在制动的时候,电机可以回收能量对电池进行充电。
雅阁混合动力汽车搭载了i-MMD双电机系统,整车动力来源采用了以驱动电机为主,发动机为辅的设计,可以实现纯电动、混合动力以及发动机直驱的模式功能。
纯电动模式下利用驱动电机驱动车轮;混动模式下发动机启动通过发电机给驱动电机充电,再让驱动电机驱动车轮;发动机直驱模式下离合器闭合,发动机作为动力源与传动系相连驱动车轮。
通过三种模式有效切换,使得车辆表现出了更为出色的动力与节油优势。
图1i-MMD系统技术方案结构[4] 3本田i-MMD双电机系统工作模式3.1纯电动模式驱动。
多款两地控制电机电路图讲解
多款两地控制电机电路图讲解两地控制电机电路图一先上一张两地控制线路图:本着从左到右、先主回路后控制回路的原则,先从主回路开始。
主回路首先从上之下是三相交流电输送到QF(即操作开关,线路上画×表示此操作开关带有漏电检测功能)。
然后输送到KM(即接触器控制线圈,中间虚线表示三个开关时连动的,即同时断开、同时合并)再经过FR(即热继电器)最后输送到三相异步电动机里。
上图花的PE是接地,不过我们上课时好像大家都木有给电动机接地。
当合上操作开关QF后,电动机能转不?很显然是不能的。
因为由于KM的控制,此时线路是断开的。
送电后电动机不能转。
这时就需要辅助电路来控制KM使其闭合,三项电形成回路使电动机转起来。
控制回路所谓两地控制就是在两个不同的地方可以控制电动机的关与停,所以一共有四个按钮分别,两个控制开、两个控制关。
两个FU是熔断器,用来保护控制电路。
KH是热继电器(和主回路上的那个是一个元件)KM是交流接触器(主回路何带开关的KM与它是一个元件),4个SB(按钮)和一个EL(即指示灯,又叫氖泡,因此无法测量好坏)。
元件说完了。
下面控制原理和接线需要注意的地方原理:合上隔离开关(上图没有,我今天晚上的实操机柜上在操作开关QF之前还有这个)然后合上控制开关,电流从FU1到KH然后流到KM(交流接触器)然后流到启动开关SB3,(不通)到SB4(不通)KM控制的自锁开关也不通。
当按下SB3或是SB4后电流流通到SB2再到SB1再到FU2最后回到W相,形成回路,有电流通过。
在这个时候KM(交流接触器)吸合控制回路的KM型成自锁(防止松开SB3或4后开路)同时主回路KM吸合三相电导通进过,进入电动机形成回路。
电动机开始工作。
当按下SB1或者SB2后,控制回路开路,交流接触器断电,KM失去自锁。
主回路KM失去吸合力,电动机停止转动。
全过程中,只要QF合上,EL(灯泡)就会亮。
接线:电工接线有个原则,即先串联后并联。
双电机变速箱结构原理

双电机变速箱结构原理
嘿,你知道双电机变速箱吗?这玩意儿可神奇啦!就好像是汽车的超级能量转化站!想象一下,一辆汽车在路上飞驰,靠的可不仅仅是发动机哦,双电机变速箱在其中扮演着至关重要的角色呢!
双电机变速箱,简单来说,就是有两个电机相互配合工作。
这就好比是一场精彩的接力赛!一个电机负责起跑加速,另一个电机则在关键时刻接力冲刺!比如说,在起步的时候,一个电机发力,让车子迅速动起来;等速度起来了,另一个电机再介入,提供更强劲的动力。
哎呀,那感觉真是太棒了!
它的结构原理呢,其实没那么复杂。
但它的精妙之处,就像是一个复杂而又有序的舞蹈!各个零部件紧密配合。
比如说齿轮,它们就像是一群训练有素的舞者,在特定的节奏下精准地转动、咬合,传递着动力。
这可不是随便什么都能做到的呀!你想想,如果齿轮“跳错了舞步”,那车子还不得出问题啊!
再看看那些传感器,它们就像一双敏锐的眼睛,时刻关注着车子的状态,然后把信息传递给控制单元。
这不就像是我们的身体有各种感官,一旦察觉到什么不对,就赶紧发出信号嘛!现在的科技真的太神奇啦!
还有啊,双电机变速箱能让车子更加节能环保呢!它可以根据不同的路况和驾驶需求,灵活地调配电机的工作模式。
这就好比你在家,会根据不同的情况选择开大灯还是小灯,多节能啊!难道不是吗?所以说,双电机变速箱真的是汽车的一大宝贝!它让我们的驾驶体验更上一层楼,也让我们的出行更加绿色环保!真心觉得这是一项超级棒的技术啊!你难道不这么认为吗?。
双电机交叉耦合同步控制原理

双电机交叉耦合同步控制主要用于保证双电机或多电机系统在协同工作时能够维持精确的同步关系,特别是在要求两个电机轴上的运动同步或协调工作的场合,如自动铺放设备、电动车辆的双电机驱动系统等。
其基本原理如下:
1. 传感与反馈:
首先,系统中需要有传感器来测量每个电机的速度、位置或转矩等参数,并将这些数据实时反馈回控制系统。
2. 误差计算:
控制系统基于反馈信息计算两个电机之间的速度差、位置差或转矩差,也就是所谓的“交叉耦合误差”。
3. 交叉耦合控制律:
设计交叉耦合控制器,根据误差计算出合适的控制信号。
控制器的核心作用是将一台电机的误差信息作为另一台电机的控制指令的一部分,这样就能通过调节两电机之间的交互作用来减少误差。
4. 动态补偿:
控制系统考虑电机的动态特性,包括惯性、摩擦、负载变化等因素,通过PID控制器或者其他先进控制算法,实时调整电机驱动力矩,使得两个电机在受到扰动后能迅速恢复同步。
5. 通讯与同步:
在某些系统中,还可能涉及到电机之间的通讯,通过高速的数据交换实现两者间的紧密同步,确保在不同工作条件下都能保持一致的运动状态。
简而言之,双电机交叉耦合同步控制是一种通过共享信息和动态调节来克服电机间差异、外界干扰以及系统内部动态变化的技术,确保在复杂环境下电机能够高效、准确地同步运行。
在实际应用中,这种控制技术还可以结合电机模型参数辨识、自适应控制、滑模控制等高级控制策略,进一步提高同步控制性能。
双电机同步控制原理
双电机同步控制原理
双电机同步控制原理是指通过控制两个电机的转速和位置,使它们能够协同工作,达到同步运动的目的。
这种控制方式广泛应用于机械、航空、汽车等领域,可以提高设备的生产效率和精度,降低故障率和维修成本。
双电机同步控制的实现需要依靠先进的电子技术和控制算法。
常用的控制方法包括PID控制、模糊控制、神经网络控制等。
其中,PID控制是最常用的一种方法,它通过对电机的转速和
位置进行测量和反馈,动态调整控制信号,使两个电机保持同步运动。
模糊控制和神经网络控制则更加高级,能够处理更为复杂的控制问题。
在实际应用中,双电机同步控制需要考虑多种因素。
首先是电机的选型和匹配,需要保证两个电机具有相同的参数和性能,以便实现同步运动。
其次是传感器的选择和安装,需要精确测量电机的转速和位置,并将数据反馈给控制器。
此外,还需要考虑电源和接线等因素,以确保系统的稳定性和安全性。
总之,双电机同步控制是一种重要的技术手段,可以提高设备的生产效率和精度,广泛应用于各个领域。
随着科技的不断发展,双电机同步控制的应用前景将越来越广阔。
双电机驱动皮带输送机控制原理图(第1页)

双电机驱动皮带输送机控制原理图(第1页)
~380/220V,50Hz B102BC 皮带运输机
M1-TA
~380/220V,50Hz B102BC 皮带运输机M2-TA
就地控制自动控制
跑偏开关
拉绳开关
过载故障指示
过载故障指示
拉绳开关动作指示
电铃信号灯
跑偏开关故障1
跑偏开关故障2
L31速度检测故障
故障指示
过载故障指示
故障信号
跑偏开关
自动控制说明:
1、本图为双电机皮带运输机两地操作、PLC 控制原理图,可控电机一览表中各皮带运输机控制原理图与此图相同,只需将元件及端子编号相应修改即可,对应关系见表。
2、每台皮带机所带拉绳开关、速度检测器、跑偏开关的具体数量参见工艺专业图纸。
3、每个低压配电屏引两根控制电缆到PLC 柜,一根为输入(DI )用,一根为输出(DO )用,参见低压配电屏端子接线图。
4、带电流表电机从每台电机在低压配电柜内的电流表引一根模拟量控制电缆至PLC 柜,不经过端子转接。
双电机驱动皮带输送机控制原理图(一)
+DZ1AC1端子接线图M1-QF M1-KA6M1-KM M1-KA4M1-KA3M1-KA1M2-QF
-71-73-75-69-67-63-61至PLC
-77
M1-KA M2-QF -79M2-KM -81-85
LA42-1008
SA 接点闭合表触点编号手动
停止自动
X
左45°0
3-4
X
右45°
1-2注:打滑动装置控制箱是否需要电源依到货设备定。
双电机驱动皮带输送机控制原理图(二)。
常用电机驱动电路及原理
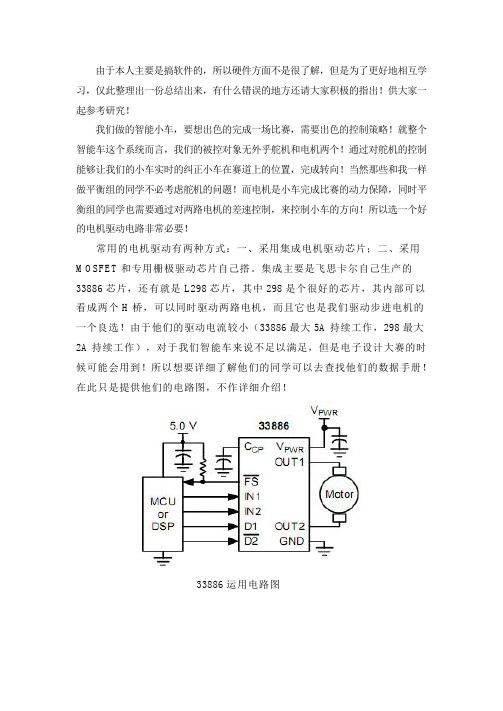
EN1 和 EN2 一般使用时我们直接接高电平,使整个电路始终处于工作状态!
通过对上面电路的了解,大家应该大致了解了 H 桥的基本工作原理,有没有更 好地驱动电路了呢?答案是肯定的!以下是直流电动机的机械特性表达式:
n 是电机的转速,U N 是电机的两端的电压,Ce 、CT 、φN 对于我们来说可以看成一 个定值,Tem 是负载转矩,车做好之后该值基本确定不变,剩下一个重要的参数 Ra 电 机电枢回路的阻值,电机本身的内阻很小,如果外部引入的电阻过大,此时直流电 动机转速降落较大,驱动电路效率较低,电机性能不能充分发挥。为了提高 电机的转速我们应该尽量减小电机电枢回路绕组的阻值,我们知道:N 沟道的 MOS FET 具有极低的导通电阻,IRF3205 导通电阻在 8mΏ左右,而 IRF4905 几乎是其两 倍,那么是不是可以考虑全部使用 N 沟道的 3205 来搭我们的驱动电路呢,答案也 是肯定的,只不过需要换一片栅极驱动芯片就行!
常用的电机驱动有两种方式:一、采用集成电机驱动芯片;二、采用 MOSFET 和专用栅极驱动芯片自己搭。集成主要是飞思卡尔自己生产的 33886 芯片,还有就是 L298 芯片,其中 298 是个很好的芯片,其内部可以 看成两个 H 桥,可以同时驱动两路电机,而且它也是我们驱动步进电机的 一个良选!由于他们的驱动电流较小(33886 最大 5A 持续工作,298 最大 2A 持续工作),对于我们智能车来说不足以满足,但是电子设计大赛的时 候可能会用到!所以想要详细了解他们的同学可以去查找他们的数据手册! 在此只是提供他们的电路图,不作详细介绍!
变频器双电机驱动主从控制实战

变频器双电机驱动主从控制实战01ABB变频器主从控制原理所谓主从控制,就是使用多个变频器控制一个或一组负载,负载之间通过刚性或柔性耦合。
外部信号(包括起动、停止、给定信号等)只与主机变频器相连,主机通过光纤将从机控制字和转速给定值、转矩给定值广播给所有的从机,实现对从机的控制。
从机一般不通过主从通讯链路向主机发送任何反馈数据,从机的故障信号单独连至主机的运行使能信号端,形成联锁。
一旦发生故障,联锁将停止主机和从机的运行。
图1 ABB主从连接注:T=发送器;R=接收器;RMIO=I/O和控制电路板。
图2 ABB从机故障信息配线应用注意点:一般主机采用速度控制,而从机采用速度还是转矩控制要视主从电机轴是采用什么方式耦合,主从之间采用刚性连接时从机需采用转矩跟随,柔性连接时要采用速度跟随。
因为前者两组传动装置间不能存在速度差异,后者会存在速度差异。
02高炉上料工艺对传动系统的要求在高炉上料系统控制中,上料小车的控制是整个电控系统的核心部分。
它是根据生产工艺的要求,把槽下备好的不同料类和不同重量的原料及时、安全、准确定位地运送到高炉炉顶,保证高炉的正常生产,一但控制出现故障,将直接影响高炉的生产。
高炉原料从槽下输送到炉顶小车输送方式是:小车卷扬机采用交流电动机拖动,电机正、反转控制,牵引通过钢丝绳连接的两台料车在斜桥上一上一下交替工作,为了能对小车做到精确控制,控制系统必须具备以下条件:1)系统能频繁起动、停止。
2)系统能正、反双向控制。
3)系统能做到无极调速,调速范围大、平滑性较高,做到平稳起动-加速-稳定运行-减速-平稳停车。
4)系统起动转矩大,做到平稳起动。
5)系统在停车时做到稳定、精确定位,防止料车过头。
6)在零速时维持大转矩输出,防止料车起动和停车时重载下滑。
图3 高炉料车系统上料工艺对料车控制的最主要的要求是:在起动或停车的瞬间也就是在零速时,变频器必须有最大的转矩输出,以防止料车下滑,因此在起动时对转矩的要求大于对速度的要求。