循迹机器人设计
《多种方法实现机器人循迹》 教学设计

《多种方法实现机器人循迹》教学设计一、教学目标1、让学生了解机器人循迹的基本概念和应用场景。
2、使学生掌握多种机器人循迹的方法和原理。
3、培养学生的动手实践能力和创新思维,能够独立完成简单的机器人循迹系统搭建和调试。
二、教学重难点1、重点(1)掌握常见的机器人循迹传感器的工作原理和使用方法,如光电传感器、红外传感器等。
(2)理解不同循迹算法的实现思路,如基于阈值判断的算法、PID 控制算法等。
2、难点(1)根据实际需求选择合适的传感器和算法,并进行有效的参数调试。
(2)解决机器人在循迹过程中可能遇到的干扰和误差问题,提高循迹的准确性和稳定性。
三、教学方法1、讲授法讲解机器人循迹的基本概念、原理和方法,让学生对相关知识有初步的了解。
2、实验法组织学生进行实验操作,通过实际搭建机器人循迹系统,加深对所学知识的理解和掌握。
3、讨论法引导学生针对实验过程中遇到的问题进行讨论,共同寻找解决方案,培养学生的团队合作和创新思维。
四、教学准备1、实验器材机器人套件(包括控制器、电机、传感器、车架等)、电脑、电源、导线等。
2、教学软件编程软件(如 Arduino IDE、Mixly 等)、仿真软件(如 Proteus 等)。
3、教学资源多媒体课件、教学视频、相关技术文档等。
五、教学过程1、导入(5 分钟)通过展示一些机器人循迹的应用案例,如智能小车在特定轨道上行驶、工业机器人按照预定路线进行操作等,引发学生的兴趣,提出问题:机器人是如何实现准确循迹的?从而导入本节课的主题。
2、知识讲解(20 分钟)(1)介绍机器人循迹的基本概念和工作原理,即机器人通过检测外部环境的信息,根据预设的规则和算法,调整自身的运动状态,实现沿着特定轨迹行走的过程。
(2)讲解常见的循迹传感器,如光电传感器、红外传感器等。
分别介绍它们的工作原理、特点和适用场景。
光电传感器:利用光电效应,将光信号转换为电信号。
可以通过检测反射光的强度来判断机器人是否偏离轨迹。
开题报告:智能循迹机器人设计(硬件部分)
毕业设计(论文)开题报告自动化智能循迹机器人设计(硬件部分)一、课题的目的及意义1. 研究目的智能化作为现代社会的新产物,是以后的发展方向,随着信息技术的快速发展,智能化已经成为时代发展的需要,当人们遇到一些环境恶劣,不能人工完成的任务,可采用智能循迹机器人完成相关的任务,无需人为管理,即可完成预期所要达到或是更高的目标。
基于生产现场和日常生活的实际需要,研究和开发智能循迹机器人具有十分重要的意义,可以提高劳动生产效率,改善劳动环境。
近年来机器人的智能水平不断提高,并且迅速地改变人们的生活方式。
同遥控机器人不同,遥控机器人需要人为控制转向、启停和进退,而智能机器人则可以通过计算机编程来实现对其行驶方向、启停以及速度的控制,无需人为干预,它集中运用计算机、传感、信息、通信、导航及自动控制等技术,是典型的高技术综合体,是21世纪的科技制造点之一。
随着机器人工业的迅速发展,关于机器人的研究也就越来越受到人们的关注,全国各高校也都很重视该课题的研究,可见研究意义重大,本设计就是对智能机器人的初步研究和设计,设计好的智能循迹机器人具有自动循迹、躲避障碍物等功能。
2. 研究意义根据学校对嵌入式系统开发的需求,依据提高学生实际动手操作能力和思考能力,加强学生对现实生活中嵌入式系统的应用为参照物,智能循迹机器人全新的设计模板,良好的电路设计,机电组合,系统开发,是加强学生学习兴趣的动源,使学生可以充分发挥自主动手能力。
使学生从理论到实践的运用。
二、国内外研究概况及发展趋势现代智能机器人发展很快,从智能玩具到其它各行业都有实质成果。
其基本可实现循迹、避障、检测贴片、寻光入库、避崖等基本功能,这几届的电子设计大赛智能机器人又在向声控系统发展。
比较出名的飞思卡尔智能小车更是走在前列。
本次设计主要实现循迹避障这两个功能。
智能机器人的发展现状智能机器人是第三代机器人,这种机器人带有多种传感器能够将多种传感器得到的信息进行融合,能够有效的适应变化的环境,具有很强的自适应能力、学习能力自治功能。
智能循迹机器人教学设计
智能循迹机器人教学设计一、教学目标(一)知识与技能目标1、学生能够理解智能循迹机器人的工作原理,包括传感器的作用和控制电路的基本原理。
2、学生能够掌握智能循迹机器人的组装方法,包括硬件的连接和机械结构的搭建。
3、学生能够学会编写简单的控制程序,实现机器人的循迹功能。
(二)过程与方法目标1、通过实践操作,培养学生的动手能力和问题解决能力。
2、通过小组合作,培养学生的团队协作精神和沟通能力。
(三)情感态度与价值观目标1、激发学生对机器人技术的兴趣和探索欲望。
2、培养学生的创新意识和实践精神。
二、教学重难点(一)教学重点1、智能循迹机器人的工作原理和硬件组成。
2、传感器的安装与调试。
3、控制程序的编写与调试。
(二)教学难点1、控制程序的逻辑设计和优化。
2、机器人在复杂环境下的循迹稳定性和准确性的提高。
三、教学方法(一)讲授法讲解智能循迹机器人的基本原理、硬件组成和控制程序的编写方法。
(二)演示法通过演示智能循迹机器人的运行过程,让学生直观地了解其工作方式。
(三)实践法学生分组进行机器人的组装、编程和调试,亲身体验机器人的制作过程。
(四)讨论法组织学生进行小组讨论,共同解决在制作过程中遇到的问题。
四、教学准备(一)教学环境计算机教室,具备网络连接和多媒体教学设备。
(二)教学资源1、智能循迹机器人套件,包括传感器、控制板、电机、车轮、导线等。
2、编程软件,如 Arduino IDE 等。
3、教学课件,包括 PPT、视频等。
4、实验记录表和评价表。
五、教学过程(一)导入(5 分钟)展示一段智能循迹机器人在特定轨道上运行的视频,引起学生的兴趣,提问学生机器人是如何实现自动循迹的,从而引出本节课的主题——智能循迹机器人。
(二)知识讲解(15 分钟)1、介绍智能循迹机器人的工作原理智能循迹机器人通常通过传感器检测地面的黑线或其他标记,将检测到的信号传输给控制板,控制板根据信号控制电机的转动,从而实现机器人的前进、后退、转弯等动作。
循迹机器人行走设计及优化研究

循迹机器人行走设计及优化研究岳洁搜救机器人竞赛是中小学机器人竞赛中较常见的赛项,在搜救型机器人竞赛中,机器人要顺利完成搜救任务,循迹行走是要解决的关键问题。
本文以“虚拟搜救机器人”为实验平台,分析了寻线循迹行走的常用算法与策略,发现其适用场合及不足,提出了用寻迹卡传感器算法与策略,优化了的寻迹卡机器人速度和寻线策略。
随着智能技术的发展,教育机器人逐步走进中小学课堂,自20世纪90年代中期开始以来,机器人竞赛规模不断扩大,比赛项目不断完备,影响力也逐步提高,现在已经成为一个普及科技教育、促进科技进步的全球性赛事。
循迹机器人是一种被广泛研究的机器人,它是在给定的区域内沿着给定的轨迹完成对各个目标点的访问,其主要指标是速度和顺利完成访问得分点的能力。
目前,机器人寻迹一般都通过视觉传感器和光电传感器获取道路信息。
朱益斌等在《自主式寻迹机器人小车的设计》提出了利用红外传感器进行寻迹,用光电编码器和PID算法对走直线进行控制,以链表结构作为电子地图。
制作的机器人能很好的进行寻迹和访问目标点,运行过程稳定,抗干扰能力较强,反应速度快,对进一步研究自动行走机器人技术有借鉴作用。
《一种竞赛机器人小车的设计与实现》一文中给出了实现机器人识别不同颜色区域的方法,根据传感器的状态实现对机器人运动方向的控制,并利用 PWM 的方式控制小车的运动速度,调试及竞赛过程机器人小车能够很好地进行接力,运行过程稳定、抗干扰能力强、反应速度快。
1 循迹行走常用算法机器人寻线最常用的方法是用灰度光电传感器探测场地环境,识别引导线。
灰度传感器是模拟传感器,利用光敏电阻检测反射光的强度,不同颜色的检测面对光的反射程度不同,光敏电阻检测光线的强度并将其转换为机器人可以识别的信号,不同颜色的检测面返回的光值也不同。
虚拟机器人搜救系统平台中的机器人灰度传感器,适合黑(白)线轨迹的跟踪:模块以数字输出,返回值为0~255的灰度值,探测到黑线时输出0,探测到白线输出为255。
寻迹机器人设计

寻迹机器人设计寻迹机器人设计摘要寻迹是机器人的一种简单视觉在机器人的运动中起着非常重要的作用为机器人运动过程中的位置的准确性提供了保障为了机器人能在任意区域内沿寻迹线行走自动绕开障碍能停在指定地点并且具有在复杂环境下对象识别自主推理路径规划及控制功能随着现代计算机技术的发展和应用以及传感器技术的发展移动机器人的研究又出现新的高潮由于机器人在很多方面的准确性可靠性和精确性上大大超过了人类机器人技术己经在很多领域里得到了很好的发展并取得了很好的效果本文详细介绍了寻迹机器人的设计设计的主要内容包括硬件部分设计和软件部分设计硬件部分包括一些零件的计算和选择软件部分即控制部分包括电动机的驱动模块最后通过对寻迹机器人的技术经济分析显示了其诸多优势如利用柔性生产系统可以降低生产成本提高生产效率并能改善人的劳动环境充分体现了研究的意义关键词寻迹机器人红外传感器I寻迹机器人设计AbstractTracing the robot is a simple vision the movement in robots playing a veryimportant role for robot movement position in the process has provided a guarantee ofaccuracy To robot can find any trace within the region along the line walkingautomatic bypass obstacles can be parked in designated locations And in a complexenvironment object recognition independent reasoning path planning and controlfunctions With the development of modern computer technology and applicationsand the development of sensor technology the mobile robot research and theemergence of new high tide As in many aspects of robot accuracy reliability andaccuracy of much more than human Robot technology has been in many fields hasdeveloped steadily and have achieved good resultsThis paper describes the tracing robot design The main elements of the designincluding hardware design and software design hardware components includingsome of calculation and choice Part of that is part of the software including controlof the motor drive moduleFinally the robot found traces of the techno-economic analysis shows that theuse of its many advantages such as flexible production system can reduce productioncosts and increase production efficiency to improve the working environment fullyembodies the research significanceKeywords tracing robotics infrared sensorsII寻迹机器人设计目录第一章前言111 选题背景及其研究意义112 国内外发展现状及其发展趋势213 整体设计思路5第二章寻迹机器人总体设计621 设计依据622 详细设计7第三章机械部分设计1131 控制部分硬件设计1132 轨迹采样及逻辑控制部分硬件设计1333 电机驱动部分硬件设计15第四章控制部分设计1941电动机驱动模块软件设计19 42电机pwm驱动22第五章电机测速及转速控制2751 转速测量2752 行走距离控制2853 电机pid调速控制28第六章技术经济分析3061 前景分析3062 济效益分析3163 社会分析31第七张结论及展望3271 结论3272 展望32参考文献33致谢35III寻迹机器人设计声明35IV寻迹机器人设计V寻迹机器人第一章前言11 选题背景及其研究意义从机器人研究发展来看机器人 Robot 这个词最早出现在2O世纪20年代美国科幻小说家阿西莫夫的科幻小说中1959年美国英格伯格和德沃尔制造出世界上第一台工业机器人UNIMATE使机器人从文学幻想变成了现实机器人的历史才由此开始在几十年的发展过程中机器人技术的研究和发展过程大致经历了3个阶段第一代是宗教再现机器人第二代是有感觉的机器人第三代是智能型机器人机器人技术是近三十年特别是近的十年间有了很大的发展之所以得到快速的发展是因为其有着广阔的应用前景在诸如制造系统服务行业[1]国防及其它社会生活方面都有使用要求现在对于机器人的研究已成为热门话题其中寻迹机器人就是一种被广泛研究的机器人各国对该项技术也十分重视而且国内外有许多重要的比赛对这一领域的研究已经成为国际前沿研究热点之一并显示出强大的生命力和广阔的应用前景是机器人应用发展最快的领域之一如今在机器人研发领域寻迹机器人已成为衡量一个国家在机器人制造领域技术水平高低的标准之一[2]之所以各国如此重视机器人的研发是因为寻迹机器人具有其独特的优势它可以使操作人员远离危险的现场被用来进行隧道的掘进军事探测爆炸和危险物的排除特别是放射性的危险环境中随着现代计算机技术的发展和应用以及传感器技术的发展移动机器人的研究又出现新的高潮由于机器人在很多方面的准确性可靠性和精确性上大大超过了人类机器人技术己经在很多领域里得到了很好的发展并取得了很好的效果例如在无人驾驶机动车无人工厂仓库服务机器人等领域智能巡迹机器人有着广泛的应用前景寻迹机器人也已经广泛进入了人们的生活领域为人类的生产生活带来了诸多方便并且大大提高了工作效率寻迹机器人在仓储业实现出入库货物的自动搬运在制造业它们生产线中大显身手高效准确灵活地完成物料的搬运任务[3]目前世界的主要汽车厂如通用丰田克莱斯勒大众等汽车厂的制造和装配线上得到了普遍应用在邮局图书馆港口码头和机场物品的运送存在着作业量变化大动态性强作业流程经常调1寻迹机器人整以及搬运作业过程单一等特点寻迹机器人的并行作业自动化智能化和柔性化的特性能够很好的满足上式场合的搬运要求在烟草医药食品化工生产加工业对于搬运作业有清洁安全无排放污染等特殊要求它们也能很好地完成任务在危险场所和特种行业更是寻迹机器人大显身手的领域在军事上自动驾驶为基础集成其他探测和拆卸设备可用于战场排雷和阵地侦察在核电站和利用核辐射进行保鲜储存的场所机器人用于物品的运送避免了危险的辐射危害人[4]在胶卷和胶片仓库机器人可以在黑暗的环境中准确可靠的运送物料和半成品我国在水下机器人开发研究方面已达到国际先进水平无人无缆自主水下机器人的开发和应用都取得重要成果综上诸多方面可见寻迹机器人的前景将是非常广阔的12 国内外发展现状及其发展趋势com发展现状根据我国机器人技术的发展基础和国家要求已经制订出我国智能机器人的发展战略即围绕经济结构战略性调整和可持续发展要求突出国家目标确定特种机器人智能机器与系统先进制造工艺与装备为三大重点发展方向研究与开发先进制造自动化理论技术和装备促进传统机器的智能化与制造装备自动化提高我国机器人技术与自动化装备的总体水平力争主要技术跟上世界先进水平缩小差距部分具有相对优势的技术达到国际先进水平局部重要技术实现跨越式发展基于上述发展战略提出了发展高级机器人的指导方针包括以信息化带动工业化和以高新技术改造传统产业占领具有战略性前沿性前瞻性的高技术制高点缩小主导产业中制造技术与国外的差距以创新为基础实现突破与跨越式发展建立创新体系有利于可持续发展等在国家高技术研究发展计划国家自然科学基金研究计划和国家攻关计划的支持下我国的智能机[5]器人研究开发开始进入一个新的时期近年来国内的很多企业己经意识到物流自动化及即时化生产组织管理的重要性纷纷酝酿建立自动化物流系统无线导引式机器人作为柔性运输的理想工具和无人化生产的典型代表愈来愈受到重视和推广应用研究不断深入领域不断扩展[6]对寻迹机器人的研究有很多方面其中导向与定位技术的研究越来2寻迹机器人越受到重视海尔集团于 2000 年投产运行的开发区立体仓库中9 台寻迹机器人组成了一个柔性的库内自动搬运系统成功地完成了每天的出入库货物和零部件的搬运任务中国在 1990 年于上海邮政枢纽开始使用寻迹机器人完成邮品的搬运工作许多卷烟企业如青岛颐中集团玉溪红塔集团红河卷烟厂淮阴卷烟厂应用激光引导式机器人完成托盘货物的搬运工作[7]寻迹机器人在我国的研究及应用起步较晚20 世纪 70 年代后期国内寻迹机器人的雏形诞生了北京起重运输机械研究所研制了三轮式AGV[ 自动导航小车 Automarted Guided Vehicles 是指装有自动导引装置能够沿规定的路径行驶在车体上还具有编程和停车选择装置安全保护装置以及各种物料移载功能的搬运车辆] 80 年代后期北京机械工业自动化研究所为二汽研制了应用在立体化仓库中的AGV 沈阳自动化研究所为金杯汽车公司研制了汽车发动机装配用的AGV 90 年代清华大学国家CIMS工程中心将从国外引进的寻迹机器人AGV成功地应用于CIMS 的实验研究清华大学计算机技术应用系研制了用于邮政中心的AGV 昆明船舶设备研究所研制了激光导向式寻迹机器人AGV 以及吉林工业大学智能车辆课题组为汽车装配线研制了视觉导向寻迹机器人AGV 等寻迹机器人的显著特点是无人驾驶其上装备有自动导向系统可以保障系统在不需要人工引航的情况下就能够沿预定的路线自动行驶将货物或物料自动从起[8]始点运送到目的地世界各国特别是西方发达国家都争先将最新的高技术用于寻迹机器人的研究和发展并先后在医学界科学技术界工业界制定了各种研究计划许多产品已经走向市场走向生产应用[9]中国市场潜在巨大的商机并且前景广阔国外具有高新技术寻迹机器人正以十分昂贵的价格进入并冲击国内市场严重影响和抑制了我国自己高技术寻迹机器人工业的发展我国政府也非常重视寻迹机器人技术的研究和发展并在国家自然科学基金863等研究项目中予以重点支持目前已取得了一定的成果但是与国外先进机器人设备技术相比还存在较大的差距[10]因此开展基于机器人技术的寻迹机器人及其相关技术研究具有重大的理论意义和显著的社会及经济效益com器人发展趋势3寻迹机器人首先导航技术是移动机器人的一项核心技术之一它是指移动机器人通过传感器感知环境信息和自身状态实现在有障碍的环境中面向目标的自主运动目前移动机器人主要的导航方式包括磁导航惯性导航GPS导航环境地图模型匹配导航路标导航视觉导航味道导航声音导航神经网络导航等上述导航技术各有利弊随着科学技术的不断发展导航技术也将随之提高从而在抗干扰能力时间分辨率方面得到增强实用性实时性可变性可维护性等性能得到提高导航技术的提高才能使寻迹机器人变得更加灵敏可靠从而更好的为人类服务其次是路径规划技术路径规划是按照某一性能指标搜索一条从起点到目标点的最优或次最优的无碰路径机器人路径规划的研究始于70年代目前国内外对这一问题的研究仍然十分活跃根据环境信息掌握程度路径规划可分为环境信息完全已知的全局路径规划环境信息不完全或未知的基于传感器的局部路径规划近年来人们研究的热点是环境信息不完全或未知的局部路径规划技术全局路径规划常用方法有可视图法栅格法自由空间法等可视图法适用于多边形障碍物对于圆形障碍物该法失效栅格大小的选择直接影响着控制算法的性能栅格选得大抗干扰能力强环境信息存储量小搜索速度快但分辨率低在密集障碍物环境中发现路径能力减弱反之栅格选得小抗干扰能力减弱环境信息存储量大搜索速度慢但分辨率高自由空间法的优点是灵活起始点和目标点的改变不会造成连通图重构但算法的复杂度与障碍物的多少成正比且不是任何情况下都能获得最优路径一种可靠准确而又简便的路径算法[11]也成了寻迹机器人发展的瓶颈第三它的研究始于20世纪80年代多传感器信息融合技术是移动机器人的关键技术之一信息融合是指将多个传感器所提供的环境信息进行集成处理形成对外部环境的统一表示[12]它融合了信息的互补性信息的冗余性信息的实时性和信息的低成本性因而能比较完整地精确地反映环境特征从而做出正确的判断和决策保证了机器人系统快速性准确性和稳定性如何在实际应用中应根据实际情况选择合适的融合方法从而体现多传感器信息融合方法的优越性这是多感应器信息融合技术需要攻克的难点在未来导航技术路径规划技术多感应器信息融合技术三个核心技术的4寻迹机器人提高甚至核心技术的变革决定了寻迹机器人的未来发展趋势13 整体设计思路首先对系统进行整体认识通过实验对该机器人的运动过程有一个初步的了解从而加深对各个元件功能的认识然后对各个元件进行测绘理解它们的功能并对每个部件进行设计和选型设计其次对控制部分硬件部分进行设计包括硬件选择电路图的绘制等最后对机器人的软件部分进行设计包括控制程序的编写等等以上是本次设计的一个大致思路具体细节将在后续章节中依次介绍 5寻迹机器人第二章寻迹机器人总体设计21 设计依据车体尺寸必须在 1010cm 范围内而且对车的运动灵活性要求较高基本不能考虑模型汽车的转向机制所以将利用模型底盘改制的可能排除了必须使用两轮转向机制的结构底盘设计为了便于制作日后在上面安装其它东西方便同时具有一定的重量使小车运行稳定所以采用 10mm 厚的聚氯乙烯板材制作此材料便宜加工特性好可以直接打孔攻丝不像有机玻璃那样易碎只是美观差一些外形设计成圆型主要是为了不至于频繁的互相卡死电机电机的选择是最困难的既要便宜又要容易使用还要有改进提高的可能四驱车的130电机应当是最好的选择此种电机有便宜到几块钱的也可以花费上百元改制使之性能大大提高如果选择带减速机构的电机驱动方式是很方便直接将轮子固定在齿轮箱的输出轴上即可但不足是其一是价格高通常一只在30元以上其二是改变电机性能比较困难所以还是选择了130电机驱动方式因为选择了130电机驱动方式就相对麻烦开始受到纽扣电池小车的启发才决定采用130电机的因为他那种摩擦传动方式比较容易实现后初步尝试了一下效果不好主要是压紧了之后电机轴与轴套间的摩擦损耗太大压松了打滑后改用皮带传动才得以实现之所以没有选择齿轮传动主要是因为没有选到合适的齿轮而且觉得难以得到不同规格的齿轮想改变传动比就很困难用皮带传动只需改变传动轮的大小即可得到所需的传动比而传动轮制作比齿轮方便许多为了简单且不受制约轮子自制轮胎用 O 型密封圈轮毂和皮带传动轮合并采用尼龙棒车制传动皮带也是用 O 型密封圈这种方式可以按照自己的需求随意改变轮子的大小和宽窄比较灵活O 型密封圈规格较多取材方便价格也便宜通常在一元以下一只6寻迹机器人车体采用了两轮驱动方式后另外一个支撑点就成了问题多数万向轮对于这个 10cm 的小车来说太大了我为此设计了一个使用 10mm 钢珠的球形支点在摩擦小的时候是滑动摩擦大时滚动性能基本能满足要求且价格很便宜总共不到 2 元钱22 详细设计车体中底盘轮毂小传动皮带轮安装在电机轴上的球形支撑座采用自制方式详见所附设计图纸固定电机采用最常见的固定管线夹规格20mm 的大部分五金电器店均有目前设计的传动比为81轮胎选用内径 30mm粗 5mm 的 O 型密封圈传动皮带选用内径 35mm 粗 18mm 的 O 型密封圈为了轮子转动灵活中心嵌入了一个内径 3mm外径 10mm厚度4mm 的滚珠轴承轮子安装结构见附图之所以将车轮设计为直径约 40mm 是为了底盘下有一定的高度便于安装光电头用于检测轨迹以及以后的检测是否到边其它就是一些螺丝螺母垫圈等通用件了这样的小车底盘虽说不十分完善但是相对来说基本满足了多数要求且在上面比较容易构建自己的结构目前底盘上所设计的四个 M3 的螺丝孔就是为了安装 25mm 的垫柱构成2 层平面以安装控制部分还可以升到 3 层安装自己需要的东西关键是取材容易便于自制价格不高除去几个自制件和电机其它的东西购买不超过 15 元以下是我在验证设计可行性过程中制作的原型及一些选用的标准件供参考22.1 小车车体原型寻迹机器人整体图建模1 在参考面上画草图2 主要用拉伸倒角切削等命令建立模型3 装配完成7寻迹机器人图 1 底座图 2 固定管线夹图3 控制器固定盒图4 整体装配图图5 130电机com明把130电机装配入线圈固定夹内电机和轮用皮带连接将控制器放入控制器固定盒固定在寻迹机器人底座第三章控制部分硬件设计概述及电机驱动部分设计31 控制部分硬件设计com思因为这个项目的主要目的是通过实施学习单片机的使用并且主要是自用而非有针对的参加某项比赛所以最好所制作的硬件电路能够为进一步学习提供帮助或者可以作为自己其它项目的实施基础为此我将系统框架设计为其中电机驱动逻辑控制部分均为独立的单片机系统这样设计主要出于单片机已十分便宜可以像普通 IC 那样使用8寻迹机器人电机驱动逻辑比较简单但是实时性要求较高所以独立出来编程较为容易电机驱动部分通常会有较大的干扰尤其是驱动普通的直流有刷电机电刷的火花干扰很强单独使用简单但抗干扰能力强的单片机可使系统更加可靠对于走轨迹项目而言逻辑部分并不十分复杂完全可以将电机控制部分融入其中但是这样系统就不容易修改为其它用途编程难度也增加了采用独立的逻辑控制模块便于学习者随时根据学习需要替换为所要学习的单片机目前我所采用的可能是 51 系列的而日后如需要可以随时替换为 ARM 或其它我所关注的型号这些新的单片机通常都有成品模块出售具有完善的数字模拟以及通讯接口这样设计就十分容易接入达到学习评估的目的com 单片机的选型依据因为项目的目标是学习单片机的应用所以我还是选用了 51 系列的单片机因为 51 的架构十分典型便于初学者理解同时其公共资源是最多的选择用于学习的单片机我认为主要考虑以下方面价格便宜开发手段便宜自己动手焊接相对容易最好不选用BGA 封装的或是脚距小于 05mm的基于上述考虑我选择了宏晶科技的 STC12C5410AD 单片机价格仅 10元左右它可以使用简单的串口编程ISP不需要专门的编程设备自制一个串口适配器最多 10 元如果选用现成的 USB 转串口产品也只要 40-50 元注意不是每种USB 转串口产品都可用下载软件厂家免费提供开发成本很低封装有 SMD 及 DIP 模式SMD 也是 127mm 脚距的很好焊接很多人排斥 51 系列的原因是认为 51 资源较少也比较慢这实际上是最早的 8051 给人留下的印象也是多数教材中所描述的而实际上 51 架构已发生了很大变化其资源已十分丰富速度也有很大提高以此款 STC12C5410AD 9寻迹机器人来说其资源为10K FlashROM 512 字节 RAM8 路 10 位 AD 4 个 PCA可实现PWM脉冲捕捉等定时功能速度也十分快详情可上该公司的网站上查询其它还有许多 51 架构的单片机具有优异的特性和特点如TI 的 MSC 系列具有一个 24 位 AD 十分适合做高精度的仪器SiliconLAB 公司的 51F 系列单片机速度极快功耗低体积小资源丰富有各种不同的规格最快的达 100MPS 引脚还可编程确定功能ST 公司的 uPSD3xxx 系列有较大的内存可以内置汉字库还集成了片内 PLDChipcon 公司现归属 TI 的CC2430 芯片将 ZigBee 无线通讯协议和51 核集成可构成 ZigBee 无线节点Nodic 公司的 nRF24E1 芯片将 24GHz 的无线收发模块与 51 核集成可方便的实现短距离无线通讯还有很多类似的产品此处就不一一例举主要是想说明51 架构还是有其优势的否则不会有如此多的公司基于 51 架构开发出这么多产品至于可靠性性价比等指标在学习时可忽略但设计产品时才需要考虑这些因素从另一个角度来说由于目前编程通常使用 C 语言所以对单片机的依附已不十分紧密只是在设计硬件线路及程序中对硬件初始化时要涉及器件而程序的逻辑部分几乎与硬件无关所以选择什么单片机学习没有什么绝对的好与坏关键看自己可利用的资源32 轨迹采样及逻辑控制部分硬件设计轨迹采样部分没有考虑采用独立方式主要是因为控制过程中需要一些过渡信息以便于编程者实现自己独特的控制逻辑由于寻迹小车逻辑不太复杂所以逻辑控制仍使用STC12C410AD 单片机实际上电机控制部分目前并未用到 AD 功能主要是为了和逻辑控制部分统一便于采购所以均选用了带 AD 的芯片对应有不带AD 的价格只便宜 1 元同时为了逻辑控制部分可以单独工作比如作为 RCX 的输入扩展器实现类似我以前发表过的LEGO 用轨迹传感器的功能所以在设计上做了考虑10寻迹机器人由于采样部分和逻辑控制部分合并后无法排入一块可以放在前述小机壳中的 PCB所以也采用的双板结构这样又多出一部分空间就增加了一个小电流的驱动电路以便可以实现一个简易的小车com 详细硬件设计STC12C54xxAD 系列单片机有 8 路 10 位 AD 转换器虽说采用的是扫描方式逐个完成但其一个通道的 AD 转换时间在 221184MHz 主频下只需约10us加上通道间的切换时间4 个通道采样时间不到 60us所以可以满足4。
智能循迹机器人控制系统设计
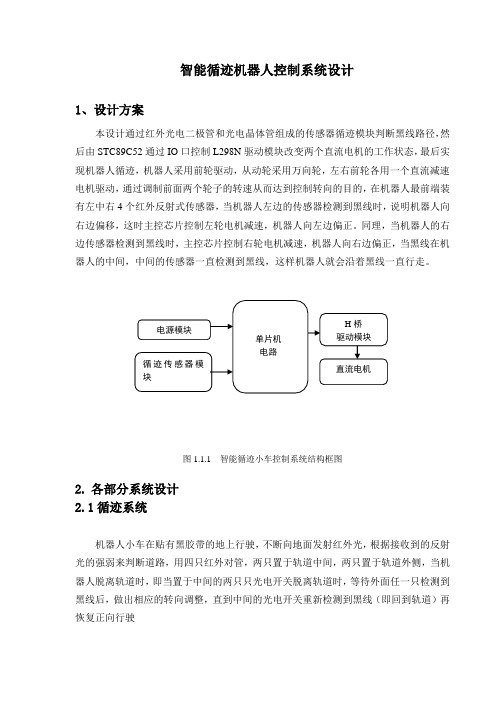
智能循迹机器人控制系统设计1、设计方案本设计通过红外光电二极管和光电晶体管组成的传感器循迹模块判断黑线路径,然后由STC89C52通过IO口控制L298N驱动模块改变两个直流电机的工作状态,最后实现机器人循迹,机器人采用前轮驱动,从动轮采用万向轮,左右前轮各用一个直流减速电机驱动,通过调制前面两个轮子的转速从而达到控制转向的目的,在机器人最前端装有左中右4个红外反射式传感器,当机器人左边的传感器检测到黑线时,说明机器人向右边偏移,这时主控芯片控制左轮电机减速,机器人向左边偏正。
同理,当机器人的右边传感器检测到黑线时,主控芯片控制右轮电机减速,机器人向右边偏正,当黑线在机器人的中间,中间的传感器一直检测到黑线,这样机器人就会沿着黑线一直行走。
图1.1.1 智能循迹小车控制系统结构框图2.各部分系统设计2.1循迹系统机器人小车在贴有黑胶带的地上行驶,不断向地面发射红外光,根据接收到的反射光的强弱来判断道路,用四只红外对管,两只置于轨道中间,两只置于轨道外侧,当机器人脱离轨道时,即当置于中间的两只只光电开关脱离轨道时,等待外面任一只检测到黑线后,做出相应的转向调整,直到中间的光电开关重新检测到黑线(即回到轨道)再恢复正向行驶2.2避障系统采用红外对管置于机器人小车正前方,可以检测到障碍物是否存在,以做出相应的判断。
2.3主控系统我们采用单片机作为整个智能机器人的核心,来对机器人进行自动控制。
单片机有着简单、方便、快捷、价格低廉、较为强大的控制功能以及可位寻址操作功能等优点,符合整体设计方案。
2.4驱动系统采用功率三极管作为电机驱动芯片。
电机驱动芯片驱动能力强、操作方便,稳定性好,性能优良。
功率三极管的使能端可以外接电平控制,也可以利用单片机进行软件控制,满足各种复杂电路的需要。
另外,驱动功率较大,能够根据输入电压的大小输出不同的电压和功率,解决了负载能力不够的问题。
采用L298N作为功率放大器的输出控制直流电机。
基于AT89S52单片机的智能循迹机器人的设计

Ke wo d AT 9 5 C y rs 8 S 2 S M ifae ee i g P nr r d d ten WM s t ipa t ed s ly a
C U和在系统可编程存储器 , P 使得 桶 95 S2成为众多嵌入式
片机 , 其主要性 能为 : M S一5 与 C 1系列单 片机产 品兼容 ,K 8 字节在系统可编程 F A H存储器 , 00次擦写周期 , LS 10 全静态 操作 : 3 M z3级 加 密程 序存 储 器 ,2个可 编程 IO 口 0— 3 H , 3 / 线 , 个 1 位 定时器/ 3 6 计数器 , 个 中断源, 8 全双工 U R A T串行 通道 , 低功耗空闲和掉电模式 , 电后 中断可唤醒 , 掉 看门狗定
众所周知 , 工业机器人是一种仿 人操作 , 自动控制 , 可重 复编程 , 能在三维空间完成各 种作业 的机 电一体化 自动化生 产设备 。它不是在简单意义上代替人工的劳动 , 而是综合 了
人 的特 长 和 机 器特 长 的 一 种 拟 人 的 电 子 机 械 装 置 。既 有 人
棚 9 5 片 机 是 Am l 司 生 产 的 8位 在 线 可 编 程 单 S2单 te公
时 器 , 数 据 指 针 , 电标 识 符 。 双 掉 功 能 特 性 描 述 : 9 5 A S2是 一 种 低 功 耗 、 性 能 C O 8 高 M S
对环境状态的快速反应和分析判断能力 , 又有 机器可长 时间
持续工作 、 精度高 、 抗恶劣环境 的能力 。在安全领域 , 器人 机
毕业论文设计--自循迹轮式移动机器人的控制系统设计论文

摘要随着社会发展和科技进步,机器人在当前生产生活中得到了越来越广泛的应用。
尤其是一种具有道路记忆功能、使用灵活方便、应用范围较广的轮式移动机器人。
本研究是一种基于瑞萨 H8单片机的自循迹轮式智能车的设计与实现,研究具有人类认知机理的环境感知、信息融合、规划与决策、智能控制等理论与方法,本文所述的智能车控制系统可以分为两个大的子控制系统,它们分别是方向控制系统和速度控制系统。
其核心控制单元为瑞萨公司 H8 系列 8位单片机 H8/3048F-ONE,系统采用反射式红外传感器检测赛道白线,在运行过程中能够识别赛道的不同情况,并能够根据信息反馈即时控制智能车的方向和速度,在预定的路径上进行快速移动。
智能车的设计要达到竞速和巡线的目的,竞速环节主要包括动力提供,速度控制两部分;巡线环节包括路面信息,转向控制两部分。
通过对智能车运动模型的建立与分析,本文详细阐述了方向控制系统与速度控制系统等重要控制系统的实现方法,使智能车能够完整通过直道、弯道、坡道和换道的过程,快速稳定的寻白线行驶。
关键词: H8单片机自循迹运动模型控制系统AbstractWith the social development and scientific and technological progress, Robot in the current production and life has been more widely used. In particular, the wheeled mobile robotis with memory function, used of flexible, wide range of application.This study is based on RenesasH8 MCU wheeled self-tracking design and realization of intelligent vehicle, Research of the theories and methods about environmental perception, information fusion, planning and decision-making and intelligent control which like Mechanism of human cognition. This intelligent vehicle control system described can be divided into two major sub-control system, They are the direction and speed control system. The core control unit for the Renesas H8 series of 8-bit microcontroller H8/3048F-ONE. System uses infrared sensors to detect track reflective white lines, during operation to identify the different circumstances circuit. And according to the feedback control the direction and speed of smart cars real-time. Fast moving on the predetermined path. Intelligent vehicle design to achieve the purpose of racing and the transmission line. Racing links include power provided and Speed control; Transmission line links including road information and steering control. Through the movement modeling and analysis on smart vehicle. This paper describes the direction and speed control system and other important realization. So the intelligent vehicle can through the straight, curved, ramp and lane changing process. Fast and stable searching the white lane.Key words:H8MCU self-tracking motion model control system目录摘要 (I)Abstract (II)绪论 (1)1课题要求及总体设计方案 (2)1.1课题要求 (2)1.2课题主要内容及设计方案 (2)1.2.1课题主要内容 (2)1.2.2总体设计方案 (2)2系统硬件设计及实现 (4)2.1硬件组成及各部分作用 (4)2.2舵机的工作原理及驱动 (5)2.2.1舵机的工作原理 (5)2.2.2舵机的驱动 (6)2.2.3舵机的标定和修正 (7)2.3传感器的工作原理及控制 (8)2.3.1传感器的工作原理 (8)2.3.2传感器的采集及处理 (8)2.4电机的工作原理及驱动 (9)2.4.1电机的选择 (9)2.4.2电机的工作原理 (10)2.4.3电机驱动 (10)2.5车体结构 (11)2.5.1硬件电路板的功能需求分析 (11)2.5.2结构需求分析 (12)2.5.3赛道基本要求 (14)3系统软件设计 (15)3.1智能车的数学模型及其控制算法的实现目标 (16)3.2方向计算算法 (16)3.2.1弯道处理 (16)3.2.2换道处理 (17)3.2.3坡道处理 (17)3.2.4过渡处理部分 (17)3.3方向控制算法 (18)3.4速度控制算法 (20)3.4.1赛道分析 (20)3.4.2行驶策略 (20)3.4.3速度给定算法 (21)3.4.4速度闭环 (21)4智能车调试与注意事项 (22)4.1智能车的硬件调试 (22)4.2系统的软件调试 (22)4.2.1单元调试 (22)4.2.2系统的组装调试 (22)4.2.3系统调试 (22)4.3注意事项 (23)结论 (24)致谢 (25)参考文献 (26)附录 (27)绪论智能机器人具有识别、推理、规划和学习等智能机制,它可以把感知和行动智能化结合起来,因此能在非特定的环境下作业。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录课程设计(论文)任务书 (Ⅰ)课程设计(论文)成绩评定表 (Ⅲ)中文摘要............................................................... .. (VI)1 设计任务描述 (1)1.1 设计题目 (1)1.2 设计要求 (1)1.2.1 设计目的 (1)1.3 基本要求 (1)2 设计思路 (2)3 软件流程图 (3)4 各部分模块设计和选取 (4)4.1 机械结构方案设计 (4)4.1.1 车模结构特点 (4)4.1.2车模转向舵机机械结构的设计 (5)4.1.3电路板 (6)4.2视频信号采集方案 (6)4.2.1采集分析 (6)4.2.2 采集时序 (7)4.2.3 中断分析 (8)5硬件电路系统设计与实现 (10)5.1 硬件电路设计方案 (10)5.2硬件电路的实现 (10)5.2.1 以S12为核心的单片机最小系统 (10)5.2.2 主板 (11)5.2.3 电机驱动电路 (13)5.2.4 摄像头 (13)5.2.5 速度传感器 (13)6 循迹小车软件设计 (15)6.1 路径识别与自适应阈值计算 (15)6.2 抗干扰处理 (15)6.3 算法实现 (16)6.3.1 偏航距离的计算 (16)6.3.2 偏航角度的计算 (16)6.3.3 曲率的计算 (16)6.4 速度PID算法 (16)7 模型车的主要技术参数 (18)8元器件清单 (19)小结 (20)致谢 (21)参考文献 (22)附录A软件流程图................................................ 错误!未定义书签。
1 设计任务描述1.1设计题目循迹机器人设计1.2设计要求1.2.1 设计目的1)了解机器人技术的基本知识以及有关电工电子学、单片机、机械设计、传感器等相关技术。
2)初步掌握机器人的运动学原理、基于智能机器人的控制理论,并应用于机器人的设计中。
3)通过学习,具体掌握循迹机器人的控制技术,并使机器人能独立执行一定的循迹任务。
1.3基本要求1)要求设计一个能循迹(白底黑线或黑底白线,线宽25mm)的机器人;2)要求设计机器人的行走机构,控制系统、传感器类型的选择及排列布局。
3)要有循迹的策略(软件流程图)。
2 设计思路根据此次课程设计的要求,我们选择以16位微控制器MC9S12DG128B单片机作为核心控制单元用于智能车系统的控制,介绍了机器人的行走机构、控制系统、传感器类型的选择及排列布局,并根据软件系统的特点简要的用流程图叙述了小车的软件设计。
最终使小车达到智能循迹的功能。
根据以上系统方案设计,循迹小车共包括七大模块:MC9S12DG128B主控模块、传感器模块、电源模块、电机驱动模块、速度检测模块辅助调试模块。
各模块的作用如下:MC9S12DG128B主控模块,作为整个智能车的“大脑”,将采集光电传感器、光电编码器等传感器的信号,根据控制算法做出控制决策,驱动直流电机和伺服电机完成对智能车的控制。
传感器模块,是智能车的“眼睛”,可以通过一定的前瞻性,提前感知前方的通道信息,为智能车的“大脑”做出决策提供必要的依据和充足的反应时间。
电源模块,为整个系统提供合适而又稳定的电源。
电机驱动模块,驱动直流电机和伺服电机完成智能车的加减速控制和转向控制。
速度检测模块,检测反馈智能车后轮的转速,用于速度的闭环控制。
辅助调试模块,主要用于智能车系统的功能调试、赛车状态监控等方面。
通过对这些模块功能介绍,结合我们在课上对机器人各项知识的了解,我们便可以将小车的大概思路整理出来,具体内容我们在后面的部分都会有相应说明。
3 软件流程图图3-1 1软件程序流程图4 各部分模块设计和选取智能车系统主要包括以下模块:S12单片机模块、驱动电机、舵机、转速反馈和CCD视频采集模块。
整体结构框图如图4.1所示。
图4.1 智能车系统功能模块图以MC9S12DG128为核心,设计寻线方案并尽可能的提高车速,是我这次课程设计课题的关键。
传统的寻线方案是使用“线型检测阵列”的红外传感器,这种方案实现简单,稳定性高,但只能获取有限的点信息,限制了更高级算法的应用,也限制了小车速度的进一步提高。
而摄像头获取的信息是面信息,不仅能获得当前小车的偏移量,而且能判断前方通道路面信息,为应用高级的控制算法提供了基础。
摄像头所能探测的路线信息远多于“线型检测阵列”探测到的,而且摄像头也有足够远的探测距离以方便对前方路况进行预判。
另外一方面16位单片机MC9S12的运算速度和自身A/D端口的采样速度,能够适应对黑白低线数摄像头的有效视频采样和对大量图像数据的处理。
4.1 机械结构方案设计4.1.1 车模结构特点本项目采用后轮驱动,前轮转向。
使用单个CCD摄像头进行导航,摄像头位于舵机正上方370mm处。
前方用2个传感器探测坡度,其位置位于小车前部100mm处,15度倾角向上偏起。
电路板置于小车腹部。
整个小车重心在中部偏后,有较好的稳定性。
底盘无改动。
经过改装后的车模参数如表4.2。
我们在实际调整时的改进办法:1)、加长舵机柄,从而增大车行进中的车轮转向速度。
这样虽然在舵机转速不变的情况下夹块了车轮的转角速度,但是给舵机转向增大了负荷。
在实际调试中,出现过舵机里面齿轮被损坏的情况。
2)、由于前轮轴和车轮之间的间隙较大,对车高速转向时的中心影响较大,会引起高速转向下车的转向不足。
而且这里是规则中严禁改动的部分,所以我们只能调整前轮内倾角来弥补车轮在高速转弯中遇到的转向不足的问题。
在实际调试中,我们发现适当增大内倾角可以增大转弯时车轮和地面的接触面积,从而增大车了地面的摩擦程度,使车转向更灵活,减小因摩擦不够而引起的转向不足的情况。
3)、底盘适当降低,在可以过坡道的情况下,尽量降低底盘,从整体上降低车的中心,使车在转弯时可以更快速。
4.1.2车模转向舵机机械结构的设计转向系统在车辆运行过程中有着非常重要的作用,合适的前桥调整参数可以保证在车辆直线行驶过程中不会跑偏,即保证车辆行驶的方向稳定性;而在车辆转向后,合适的前桥可以使得车辆自行回到直线行驶状态,即具有好的回正性。
基于这个原因,前桥参数调整及转向系统优化设计必然会成为智能车设计中机械结构部分的重点,在实际操作中,我们通过理论预测进行方案的可行性分析,然后做出实际结构以验证理论数据。
图2.2 改进后的舵机转向机构及安装图在最终设计的这套机构中,我们综合考虑了速度与扭矩间的关系,尽量减小舵机的负荷,并根据模型车底盘的具体结构,简化了安装方式,实现了预期目标,不过该机构仍存在自身重量太大的问题,我们将在以后的调试过程中逐渐改进。
4.1.3电路板共用到一块PCB电路板,即车身主板(包括MCU,调试电路,电源电路,红外传感器,加速度传感器电路,测速传感器等) ,其外形尺寸见表4.3。
4.2视频信号采集方案4.2.1采集分析本系统所使用的CCD摄像头输出的是PAL制式的视频信号,其一幅图像包含575个图像行,每行最多有767个点(按荧光屏的长宽比为4:3计算),因此其图像解析度能达到575×767≈440000个象素。
而对于智能车系统而言,由于受MC9S12DG128单片机内存和运算速度的限制,这么大解析度的图像是无法处理的。
因此必须降低图像的分辨率。
我们最终确定采集图像的分辨率为48×40,即每行采集48个点,每幅图像采集40行。
4.2.2 采集时序具体说来,采集一场的流程是这样的:第一步,LM1881分离出的奇场同步信号在DG128的H口产生中断。
根据PAL 规范,此时意味着还有22行(约1408μs,视LM1881的信号延时而定)将开始第一个数据行。
为确保正确的采集到数据,使定时器定时23.5行(23.5×64μs=1504μs),定时结束后,开启行中断,准备采集数据。
第二步,定时器定时1504μs时间到,此时开启行通道,允许中断,并使控制ATD转换的行计数器归零,以标志一幅图像的开始。
第三步,大约32μs(0.5行)后,行中断到。
由于一场中有280多个行,但ATD 只采集其中的40行,为此设置了一个行计数器,每次行中断都将该计数器加一,当该计数器的值与预存数组里的某个数相等时,表示该行应该采集。
根据PAL的规范,在数据行中,行同步信号后6μs(上升沿,如果选下降沿有效,应该是10.3μs)才会有真正的图像数据出现,并持续52μs到该行结束。
为此在该行的行中断中使定时器定时6μs,定时时结束后才能开始采集。
第四步,定时器定时6μs时间到。
此时应立即开始ATD采集。
由于ATD是按序列采集的,一个序列可以连续采集1~8个点,并可设置是单序列还是扫描方式。
每个序列采集完成后将产生一次ATD中断。
为减少ATD中断次数,在ATD初始化中已设置转换序列长度为8。
此时以扫描方式开启ATD,采集48个点需要6次ATD 中断。
第五步,每隔约8μs,ATD中断发生一次。
该步中最重要的就是把ATD的数据转移到存储图像的数组中。
由于一行中ATD要采集6个序列,因此要记录已经采集的序列数,每次进入ATD中断,都使之加一,当序列数为6时,标志着一个行已经采集完了。
一行采集完后将采集行计数器(注意:不是第三步中提到的行计数器)加一,并应停止ATD,但是S12中并没有使ATD停止直接方法,唯一的办法是使ATD以单序列采集方式再采集一次。
但是这次完成后仍然会发生中断,中断处理程序可根据采集的序列数来判断是否是这种额外的情况,如果是,中断处理程序除了读一下ATD数据寄存器以清中断标志位之外,并不需要做任何事。
第六步,ATD中断不断的向图像数组中写入数据,直到行计数器计到40。
此时意味着一幅图像数据已经采集完成。
此时应关掉行中断,以免其产生额外动作。
第七步,偶场中断到。
其实就是奇场同步信号的下降沿,如果没有进行相应设置和接线,将没有这个中断。
PAL制式的信号中,奇场同步信号和偶场同步信号以20ms的间隔交替出现,因此可以将此两种信号作为小车调整的基准时间。
此后直到下一个奇场中断到来,开始另一场的采集。
可见,程序的运行完全是由各个中断的来推动的。
程序的流程图如图4.2。
4.2.3 中断分析视频采集共涉及到6个中断:奇场中断、偶场中断、行中断、定时器中断1、定时器中断2、ATD中断。
但是只有3个硬件中断源,即H口中断、定时器中断和ATD中断,对应只有3个中断服务程序。
为此需要在中断程序中区分中断的类型。
1)H口中断H口中断服务程序要区分是奇场中断、偶场中断还是行中断,这是通过寄存器的中断标志为来实现的。
2)定时器中断定时器中断要区分是定时了多少时间。
为此我们设置了一个“服务标志”,不同的定时时间设置不同的服务标志,以使定时器中断程序做不同的处理。