能控性与能观性分析
能控性与能观性

假使输出矩阵C中有某一列全为零,譬如说第2列中c12, c22, …, cm2均为零,则在 t y(t)中将不包含 e 2 x20这个自由分量,亦即不包含 x2(t)这个状态变量,很明显,这 个x2(t)不可能从y(t)的测量值中推算出来,即x2(t)是不能观的状态。
系统是状态完全能控的
x 2 1 x2 b2u y c1 c2 x
1 1 b1 x x u; 0 0 1
对于式(3-5)的系统
x 1 1 x1 x2 b1u x 2 1 x2
x2不受u(t)的控制,而为不能控的系统。
对式(3-3)的系统,系统矩阵A为对角线型,其标量微分方程形式为
x 1 1 x1
x 2 2 x2 b2u
x 2
x 1
1 1 0 x x u; 0 1 b2
对于式(3-4)的系统
y c1 c2 x
x 1 1 x1 x2
c13 c23 c33
1 2 1t 1t 1t e x10 te x20 t e x30 2! x1 (t ) 1t 1t e x20 te x30 这时,状态方程的解为 x(t ) x2 (t ) x ( t ) 3 1t e x 30
从而
y1 (t ) c11 c12 y (t ) y2 (t ) c21 c22 y3 (t ) c31 c32
控制系统的能控性与能观性
系统能控性与能观性的对偶关系
▪ 卡尔曼对偶原理
若有两系统 x1 A1x1 B1u1 x2 A2x2 B2u2
y1 C1x1
y2 C2x2
满足条件 A2 A1T , B2 C1T , C2 B1T
▪ 例:已知系统的状态方程如下,判别其能控性
2 1 3 2 5 4
[B
AB
A2
B]
1
1
2
2
4
4
-1 -1 -2 -2 -4 -4
▪ 系统的能控矩阵M的秩等于2,即rankM=2,所 以系统是不完全能控的。
▪ 3. 通过系统的输入和状态矢量间的传递函数来判别 系统的能控性
▪ 例:(1)
4 5 5
x
1
0
1
1
x
0 b2
u;
y
c1
c2 x
画出模拟结构图
(3-2)
u b2
x1
c1
1
x2
c2
y
2
u b2
x2
1
c2
x1 c1
y
1
▪ 由图可以看出: (3-1) 的系统模拟结构 图中状态变量 x1 是一个与 u(t) 无任 何联系的孤立部分,也就是说 x1 不 受 u(t)的控制,因此,x1 是不能控的。 尽管 x2受到的 u(t) 控制,但整个系统仍
( An1)T CT T
CAn1
满秩,即RankN=n。
1 1 0 x 2 1 x 1 u
y 1 0 x
N
C CA
1 0
1 1
rankN=2,满秩,系统是能观的。
控制系统的能控性和能观测性
解
根据定理3-5, 系统(1)能控 ; 系统(2)不能控
(定理(3-4)、定理(3-5)不仅可以判断系统能控性,而且对 于不能控的系统,可以知道哪个状态分量不能控。) 说明:1.上面通过几个定理给出判断系统能控性的判据。虽然它们 的表达形式、方法不同,但是,在判断线性定常系统能控性时是等 价的。
2.在线性连续定常系统中,由于能达性和能控性是等价的,因此, 能控性判据同样可以判断能达性。
一般情况下,系统方程可以表示为
Ax Bu x y Cx
(1)
状态能控与否,不仅取决于B 阵(直接关系),还取决于A 阵(间 接关系)。 系统能观测问题是研究测量输出变量 y 去确定状态变量的问题。
y(t )为输出量,两个电 例3-3 电路如下图所示。选取 u(t )为输入量, 感上的电流分别作为状态变量,则系统方程为
λi Ji 0
1 λi
0 1 阵 B 中与每一个约当子块最下面 一行对应行的元素不全为零。
例3-7 有如下两个线性定常系统,判断其能控性。
0 4 1 0 (1) x 0 4 0 x 4 u 0 2 0 3 0 4 1 4 2 (2) x 0 4 0 x 0 0 u 0 2 0 3 0
3)只有整个状态空间中所有的有限点都是能控的,系统才是能 控的。 4)满足(3)式的初始状态,必是能控状态。
x(0) e Aτ Bu( τ ) d τ
0
t1
(3)
5)当系统中存在不依赖于 u(t ) 的确定性干扰 f (t ) 时,f (t ) 不会改 变系统的能控性。 Ax Bu f (t ) x (4)
实验十 系统能控性与能观性分析

实验十 系统能控性与能观性分析一、实验目的1. 通过本实验加深对系统状态的能控性和能观性的理解;2. 验证实验结果所得系统能控能观的条件与由它们的判据求得的结果完全一致。
二、实验设备同实验一。
三、实验内容1. 线性系统能控性实验;2. 线性系统能观性实验。
四、实验原理系统的能控性是指输入信号u 对各状态变量x 的控制能力。
如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间内把系统所有的状态变量转移到状态空间的坐标原点。
则称系统是能控的。
系统的能观性是指由系统的输出量确定系统所有初始状态的能力。
如果在有限的时间内,根据系统的输出能唯一地确定系统的初始状态,则称系统能观。
对于图10-1所示的电路系统,设i L 和u c 分别为系统的两个状态变量,如果电桥中4321R R R R ≠,则输入电压u 能控制i L 和u c 状态变量的变化,此时,状态是能控的;状态变量i L 与u c 有耦合关系,输出u c 中含有i L 的信息,因此对u c 的检测能确定i L 。
即系统能观的。
反之,当4321R R =R R 时,电桥中的c 点和d 点的电位始终相等, u c 不受输入u 的控制,u 只能改变i L 的大小,故系统不能控;由于输出u c 和状态变量i L 没有耦合关系,故u c 的检测不能确定i L ,即系统不能观。
1.1 当4321R R R R ≠时 u L u i R R R R C R R R R R R R R L R R R R R R CR R R R R R R R L u i CLC L ⎪⎪⎪⎭⎫⎝⎛+⎪⎪⎭⎫ ⎝⎛⨯⎪⎪⎪⎪⎪⎭⎫+++-+-+-⎝⎛+-+-+++-=⎪⎪⎭⎫ ⎝⎛01)11(1)(1)(1)(143214343212143421243432121(10-1)y=u c =[01]⎪⎪⎪⎭⎫ ⎝⎛c Lu i (10-2)由上式可简写为bu Ax x+= cx y = 式中⎪⎪⎭⎫⎝⎛=C L u i x ⎪⎪⎪⎪⎪⎭⎫+++-+-+-⎝⎛+-+-+++-=)11(1)(1)(1)(143214343212143421243432121R R R R C R R R R R R R R L R R R R R R C R R R R R R R R L A⎪⎪⎪⎭⎫ ⎝⎛=01L b 1] [0=c由系统能控能观性判据得 ][Ab brank =2 2=⎥⎦⎤⎢⎣⎡cA c rank 故系统既能控又能观。
系统的能控性与能观性分析及状态反馈极点配置要点

实 验 报 告课程 自动控制原理 实验日期 12 月26 日 专业班级 姓名 学号实验名称 系统的能控性与能观性分析及状态反馈极点配置 评分批阅教师签字一、实验目的加深理解能观测性、能控性、稳定性、最小实现等观念,掌握状态反馈极点配置方法,掌握如何使用MATLAB 进行以下分析和实现。
1、系统的能观测性、能控性分析;2、系统的最小实现;3、进行状态反馈系统的极点配置;4、研究不同配置对系统动态特性的影响。
二、实验内容1.能控性、能观测性及系统实现(a )了解以下命令的功能;自选对象模型,进行运算,并写出结果。
gram, ctrb, obsv, lyap, ctrbf, obsvf, mineral ; (b )已知连续系统的传递函数模型,182710)(23++++=s s s as s G ,当a 分别取-1,0,1时,判别系统的能控性与能观测性;(c )已知系统矩阵为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=2101013333.06667.10666.6A ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=110B ,[]201=C ,判别系统的能控性与能观测性;(d )求系统1827101)(23++++=s s s s s G 的最小实现。
2.实验内容原系统如图1-2所示。
图中,X 1和X 2是可以测量的状态变量。
图1-2 系统结构图试设计状态反馈矩阵,使系统加入状态反馈后其动态性能指标满足给定的要求:(1) 已知:K=10,T=1秒,要求加入状态反馈后系统的动态性能指标为:σ%≤20%,ts≤1秒。
(2) 已知:K=1,T=0.05秒,要求加入状态反馈后系统的动态性能指标为:σ%≤5%,ts≤0.5秒。
状态反馈后的系统,如图1-3所示:图1-3 状态反馈后系统结构图分别观测状态反馈前后两个系统的阶跃响应曲线,并检验系统的动态性能指标是否满足设计要求。
三、实验环境 1、计算机1台;2、MATLAB6.5软件1套。
四、实验原理(或程序框图)及步骤 1、系统能控性、能观性分析设系统的状态空间表达式如下:p m n R y R u R x Du Cx y Bu Ax x∈∈∈⎩⎨⎧+=+=(1-1)其中A 为n ×n 维状态矩阵;B 为n ×m 维输入矩阵;C 为p ×n 维输出矩阵;D 为p ×m 维传递矩阵,一般情况下为0。
自动化--能控性与能观测性
能控性与能观测性现代控制理论的能控性能观测性是建立在状态空间描述的基础上,状态方程描述了输入u(t)引起状态x(t)的变化过程,输出方程则描述了由状态的变化引起输出y(t)的变化,能控性能观测性就是分析输入u(t)对状态x(t)的控制能力和输出y(t)对状态的反映能力,一个系统若具有能控性和能观测性,人们就可以对它实施最优控制。
一、引言1960年卡尔曼提出系统的能控性和能观测性问题,它是系统的两个基本特征。
对经典控制理论所讨论的SISO(单输入单输出系统),它的输入量和输出量之间的动态关系可唯一的由系统的传递函数确定,即唯一输入对应唯一输出,而且输出可观测也可唯一确定输入。
现代控制理论着眼于分析、优化和控制MIMO(多输入多输出)系统内部特性和动态变化状态,其状态变量向量维数一般比输入向量维数高,并且有时还不能测量,所以存在系统内部状态能量控制和能观测问题。
二、能控性能控系统:假设系统初时刻处于状态空间任一点x=x(t0),倘若能够找到容许控制函数(输入)u在有限时间区间j内将系统由初态x转移到状态空间原点x(tj)=0则称为能控系统。
能达系统:假设系统初始时刻位于状态原点x(t)=0,倘若能够找到容许函数(输入)u 在有限时间内将系统由初态转移到状态空间任一点x(t)=x则称系统为能达系统。
对于线性连续系统,能控和能达是等价的,对线性离散系统则不同。
线性定常系统状态完全能控的充要条件是其能控性矩阵QK=[B AB……An-1B]满秩(代数判据),如果A为某个特征值有一个或者多个约旦矩阵则系统能控的充要条件是对于A的每个特征值的约旦块的B分块的最后一行都不全为零。
线性定常连续系统的输出的能控性判据为能控矩阵[CB CAB……CAn-1B]满秩(模态判据)。
能控性判据可以通过MATLAB直接得出矩阵的秩。
三、能观测性为了抑制干扰,降低参数灵敏度以构成最优系统,控制系统大多采用反馈形式,而反馈信息一般由系统的状态变量组合而成,但并非所有的状态变量在物理上都能测取到,于是提出能否通过输出的测量获得全部变量信息的问题,既可观测性。
(整理)控制系统的能控性和能观测性
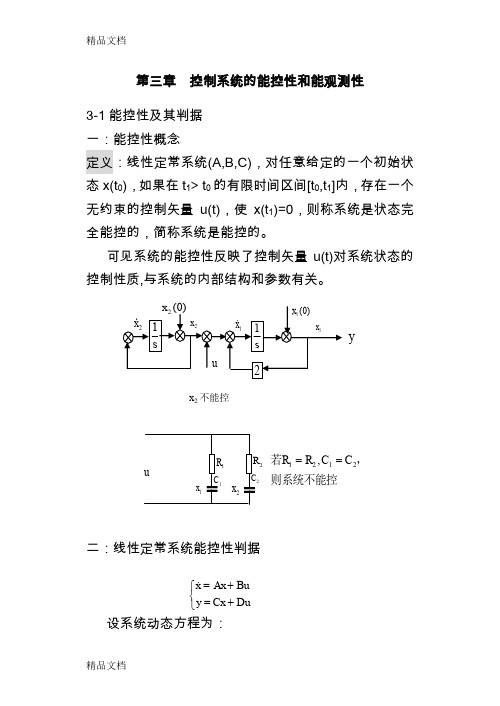
第三章 控制系统的能控性和能观测性3-1能控性及其判据 一:能控性概念定义:线性定常系统(A,B,C),对任意给定的一个初始状态x(t 0),如果在t 1> t 0的有限时间区间[t 0,t 1]内,存在一个无约束的控制矢量u(t),使x(t 1)=0,则称系统是状态完全能控的,简称系统是能控的。
可见系统的能控性反映了控制矢量u(t)对系统状态的控制性质,与系统的内部结构和参数有关。
二:线性定常系统能控性判据设系统动态方程为:x 2不能控y2则系统不能控,若2121,C C R R ==⎩⎨⎧+=+=DuCx y Bu Ax x设初始时刻为t 0=0,对于任意的初始状态x(t 0),有: 根据系统能控性定义,令x(t f )=0,得:即:由凯莱-哈密尔顿定理:令 上式变为:对于任意x(0),上式有解的充分必要条件是Q C 满秩。
判据1:线性定常系统状态完全能控的充分必要条件是:⎰-+=ft f f f d Bu t x t t x 0)()()0()()(τττφφ⎰⎰---=--=-ff t f f t f f d Bu t t d Bu t t x 01)()()()()()()0(τττφφτττφφ⎰--=f t d Bu x 0)()()0(τττφ∑-=-==-1)()(n k kk A A eτατφτ∑⎰⎰∑-=-=-=-=101)()()()()0(n k t k k t n k k k ff d u B A d Bu A x ττταττταkt k u d u f=⎰)()(ττταUQ u u u u B A B A AB B Bu A x c k n n k kk -=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-=-=--=∑ 321121],,,[)0(能控性矩阵Q C =[B ,AB ,A 2B ,…A n-1B]满秩。
对于单输入系统,Q C =[b ,Ab ,A 2b ,…A n-1b] 如果系统是完全能控的,称(A 、B )或(A 、b )为能控对。
系统的能控性能观测性稳定性分析

系统的能控性能观测性稳定性分析1. 能控性(Controllability)能控性是指系统输出能否通过适当的输入方式对系统进行控制。
如果一个系统是能控的,意味着通过控制器的输入信号,我们能够将系统的输出发展到我们所期望的状态。
对于一个线性时不变(LTI)系统,能控性可以通过判断其控制矩阵的秩来确定。
控制矩阵(也称为控制可达矩阵)是由系统的状态方程和控制器的输入方程组成的。
如果控制矩阵的秩等于系统的状态数量,则系统是能控的;否则,系统是无法被完全控制的。
能控性的分析可以帮助我们选择合适的控制策略和控制器设计。
当系统的能控性差时,我们可能需要通过增加或修改系统的状态变量或控制器的输入方式来提高系统的能控性。
2. 能观测性(Observability)能观测性是指系统的内部状态能否通过系统的输出信号来判断。
一个能观测的系统意味着我们可以通过观测系统的输出来估计系统的状态。
对于一个线性时不变系统,能观测性可以通过判断其观测矩阵的秩来确定。
观测矩阵(也称为观测可达矩阵)是由系统的状态方程和输出方程组成的。
如果观测矩阵的秩等于系统的状态数量,则系统是能观测的;否则,系统的一些状态是无法通过输出来观测到的。
能观测性的分析可以帮助我们选择合适的观测器设计,以实现对系统状态的估计。
当系统的能观测性差时,我们可能需要增加或改变系统的输出方程来提高系统的能观测性。
3. 稳定性(Stability)稳定性是指系统在受到扰动后是否会逐渐恢复到原来的状态。
对于线性时不变系统,稳定性可以分为几种类型:零状态稳定、有限状态稳定和无限状态稳定。
零状态稳定(Zero-state stability)是指当系统受到初始条件扰动时,输出信号会在有限时间内收敛到零。
有限状态稳定(Finite state stability)是指当系统受到初始条件扰动时,输出信号会在有限时间内收敛到一些有限值。
无限状态稳定(Infinite state stability)是指当系统受到初始条件扰动时,输出信号会在无限时间内收敛到一些有限值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Chapter3能控性与能观性现代控制理论中,用状态空间方法描述系统,将系统的的输出输入关系分成两部分,一部分是系统的控制输入对状态的影响,由状态方程描述;另一部分是系统输出与状态的关系,由输出方程描述。
1960年,Kalman 根据“控制输入对状态的影响”首先提出了系统状态的能控性问题,根据“输出与状态的关系”提出了系统状态的能观性问题。
能控性:输入)(t u 能否通过“状态方程”引起系统任一状态)(t x i 的变化)(t xi ?能控性描述通过输入)(t u 对系统状态)(t x 的控制能力;能观性:系统任一状态)(t x i 的变化能否通过“输出方程”引起输出)(t y 的变化?或者由输出)(t y 的变化能否通过“输出方程”确定系统所有状态变量)(t xi ,能观性描述通过输出)(t y 对系统状态)(t x 的测辨能力。
3.1 系统的能控性 3.1.1 能控性的定义和性质系统能控性定义:在初始时刻0t t =时,对系统施加控制)(t u 使系统状态)(t x 发生变化,并且输出)(t y ,)()()()()(t u t B t x t A t x+= ,)()()(t x t C t y =,0t t ≥图3-1 能控性与能达性如果在有限时间a t t t ≤≤0内存在容许(满足∞<⎰at t t t u 0d )(2)的控制向量)(t u ,能使此系统从不为0的初始状态)(0t x 转移到0终态0)(=a t x ,则称状态)(t x 在),(0a t t 上是能控的,或称在时刻0t 上是能控的。
若对系统状态的任一元素均能满足上述条件,则称系统在],[0a t t 上是完全能控(简称能控)的。
而由0初态0)(0=t x ,在时间],[0a t t 内转移到任意不为0的终态0)(≠f t x 称为能达性;对于线性定常系统,能控必能达,能达必能控,二者等价。
(参见图3-1 ) 系统能控性的基本性质:状态方程的解 ⎰Φ+Φ=tt u B t x t t t x 0d )()(),(),()(00ττττ (3-1)根据定义,若状态向量是能控的,则存在容许控制)(t u ,使0d )()(),(),()(000=Φ+Φ=⎰at t a a a u B t x t t t x ττττ由此可反解出 ⎰ΦΦ-=-at t a a u B t t t t x 0d )()(),(),()(010ττττ),(01t t a -Φ与积分变量τ无关,可以放到积分号下⎰ΦΦ-=-at t a a u B t t t t x 0d )()(),(),()(010ττττ),(),(001a a t t t t Φ=Φ-(反演性),),(),(),(00ττt t t t a a Φ=ΦΦ(传递性)⎰⎰Φ-=ΦΦ-=aat t t t a a u B t u B t t t t x 0d )()(),(d )()(),(),()(000ττττττττ对线性定常系统,)(0e),(ττ-=Φt A a t上式可写成⎰⋅-=-at t t A u B t x 00d )(e )()(0τττ (3-2)3.1.2 能控性判据将τA e-写成有限和形式∑-=-=1)(n k k k A A eτατ代入(3-2)式可得kaat k n k k t A u B A u B x βτττταττ=-=-⎰∑⎰-=⋅-=]d )()([d )(e1⎪⎪⎪⎪⎪⎭⎫⎝⎛==---=∑11011)...(n n k n k k B A AB BB A ββββ若系统能控,上式就有解,所以对任意向量0x ,其充要条件是能控矩阵满秩。
)...(1B A AB Bn C -=Γ (3-3)定理3-1(70P 定理3.1.1)n 阶线性定常系统)()()(t u B t x A t x⋅+⋅= 完全能控的充要条件是nm n ⨯能控矩阵n B A AB B n C ==Γ-)...rank(rank 1满秩!该定理也适合离散系统。
推论:系统是否能控只与输入矩阵B 有关,而与输出矩阵C 以及终端时间无关。
若系统在区间],[0a t t 上是完全能控的,那么系统在区间],[a b a t t t >也一定是完全能控的。
即在某一时间段完全能控的系统,在随后的时间段也一定是完全能控的。
线性代数中已经证明,)(rank rank TCC C ΓΓ=Γ,对单输入系统,C Γ是方阵,而对多输入系统,)(TC C ΓΓ才是方阵,所以,一个判断能控矩阵是否满秩的方法是:检验“方阵”C Γdet 或0)det(?−→−ΓΓT CC ,如果0)det(≠ΓΓTC C ,能控性矩阵满秩,如果行列式0)det(=ΓΓTCC ,则能控性矩阵不满秩。
例3-1(参考72P 例3.1.3,35P 习题1.8) 判断二阶水槽系统的能控性。
⎪⎪⎭⎫⎝⎛⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛--=⎪⎪⎭⎫ ⎝⎛21212121121000u u b b x x a b a x x解:)rank(rank AB BC =Γ⎪⎪⎭⎫ ⎝⎛--=22221111000r a n k b a b b b b a b 由此可见,只有当参数21b b 、都0≠,以上能控性矩阵才是满秩的。
此时系统是完全能控的,即当水位高度偏离平衡位置时,可以通过调节两个阀门21u u 、调节水位高度回到平衡位置。
故系统是能控的,说明水的输入量能够控制两个水槽的水位12h h 、的变化。
因为由图,两个阀门,两个输入。
若01=b 相当于01=u 的同时,2x 对1x 的影响也没有了,所以此时)(1t x 不能控;若02=b ,相当于02=u ,所以)(2t x 不能控。
能控性的直接判别对于某些特例,系统的能控性可直接判别。
*定理1 若线性定常系统)()()(t Bu t Ax t x+= 的A 为对角形,且对角线上的元素(特征值)均不相同,则状态完全能控的充要条件是B 阵没有全为零的行。
⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛+⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=m nm n n n im i i i m n i u u u u b b b b b b b b x32132132111312111...0...000...λλλ,第i 行全为0,所以,第i 个状态i i i x xλ= 与所有输入无关,i x 是不能控的,因此系统不完全能控。
反过来,如果B 阵没有一行全为0,比如第i 行中,元素0≠ij b ,则j ij i i i u b x x+=λ 至少有一个j u 分量可以对其控制。
*定理2 若线性定常系统)()()(t u B t x A t x ⋅+⋅= 的A 为约当形,并且每个约当块所对应的特征值均不相同,则状态完全能控的充要条件是B 阵中与每个约当块所对应的最后一行中,没有一个最后行全为零。
设特征值为λ⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛+⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛∑∑∑===mk k nk m k k k m k k k n i n i u b u b u b x x x x x x 1121111111 λλλ ⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛+⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛==m nm n n n im i i i m i u u u u b b b b b b b b x x x3213213211131211110...000......111λλλ,若最后行全为0,则最后一个状态分量n n x xλ= 就是不能控的,因此系统不完全能控。
反过来,若最后一行有某个分量0≠nj b 则j nj n n u b x x+=λ 至少有一个j u 分量可以对其控制。
如果是其他行(不是最后一行)全为0,极端情况,控制矩阵只有0≠nj b ,其他元素均为0,⎪⎪⎪⎪⎪⎭⎫⎝⎛+⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛j nj n i n i u b x x x x x x0011111λλλ,j nj n n n n n u b x x x x x x x x x x x +=+=+=+=--λλλλ 11322211,系统仍然是能控的。
例3-2(72P 例3.1.4) 判断能控标准型u x x x a a a x x x⎪⎪⎪⎭⎫ ⎝⎛+⎪⎪⎪⎭⎫ ⎝⎛⎪⎪⎪⎭⎫ ⎝⎛---=⎪⎪⎪⎭⎫ ⎝⎛100100010321210321 是否状态完全能控?解:⎪⎪⎪⎭⎫⎝⎛+---==Γ22122110100Rank )rank(rank a a aa AB BC它是一个三角形矩阵,反对角线上的元素均为1,无论21a a 、取何值,矩阵行列式都不等于零,因此系统总是状态完全能控的。
对给定的)()()(t Bu t Ax t x += 状态空间模型,Matlab 给出了系统能控性矩阵的函数B)ctrb(A,。
因此,对于单输入系统,可根据0B)),det(ctrb(A ?=来判断系统的能控性;对于多(单)输入系统可用0))B ctrb(A,*B),det(ctrb(A ?='来判断系统的能控性。
此外,无论单输入还是多输入,都可以直接用秩函数B))A,rank(ctrb(判断。
例如,对73P 例3.1.5 执行以下m-文件,可得能控性矩阵的秩=2,小于系统的阶数3,故系统是不能控的。
3]10;022;03[1A =;1]-1;-11;1[2B =;B))A,rank(ctrb( 2ans =线性时变系统的能控性判据定义Gramian 矩阵 ⎰ΦΦ=at t T T a C t B B t t t W 0d ),()()(),(),(000τττττ (3-4)根据能控性定义,令 0d )()(),(),()(000=Φ+Φ=⎰at t a a a u B t x t t t x ττττ左乘),(01t t a -Φ-即得:⎰Φ=-at t u B t x 0d )()(),(00ττττ另一方面,(3-4)两边右乘001),(x t t W a C --等式左边0x -=,右边考虑到与积分变量τ无关可以放到积分号下,得到关系式⎰-Φ-Φ=-at t a C T T x t t W t B B t x 0d ]),(),()()[(),(001000τττττ定理3-2(P74定理3.1.2)线性连续时变系统)()()()()(t u t B t x t A t x+= 、)()()(t x t C t y =在区间],[0a t t 内,状态完全能控的充要条件是n n ⨯能控性矩阵⎰ΦΦ=at t T T a C t B B t t t W 0d ),()()(),(),(000τττττ为非奇异,即0),(det 0≠a C t t W比较两式可得控制律为 0010),(),()()(x t t W t t t B t u a C T T -Φ-= (3-5) 结果表明:(1)系统能控的充要条件是存在),(01a C t t W -,即0),(det 0≠a C t t W 满秩;(2)在时间],[0a t t 内将不为0的初态0x 转移到0,所施加的控制不但随时间而变,其大小还与a t t 、0有关。