机械原理第八章_平面连杆机构及其设计
孙恒《机械原理》(第八版)学习辅导书第8章 连杆机构及其设计【圣才出品】
第8章 连杆机构及其设计8.1 复习笔记本章主要介绍了平面四杆机构的类型及演化、基本知识和设计(作图法和解析法)。
学习时需要重点掌握不同条件下连杆机构的设计(作图法),常以分析作图题的形式考查。
除此之外,铰链四杆机构有曲柄的条件、急回运动、行程速度变化系数、传动角、死点等内容,常以选择题、填空题和判断题的形式考查,复习时需要把握其具体内容,重点记忆。
一、连杆机构及其传动特点(见表8-1-1)表8-1-1 连杆机构及其传动特点二、平面四杆机构的类型及应用1.四杆机构的基本形式(1)基本构架铰链四杆机构是平面四杆机构的基本形式,如图8-1-1所示。
台图8-1-1该机构各部分名称及含义见表8-1-2。
表8-1-2 铰链四杆机构(2)平面四杆机构的类型(见表8-1-3)表8-1-3 平面四杆机构的类型2.平面四杆机构的演化形式(1)改变构件的形状和运动尺寸如图8-1-2所示,曲柄摇杆机构中,将摇杆做成滑块形式,并将摇杆的长度增至无穷大,则演化成为曲柄滑块机构;曲柄滑块机构进一步演化为双滑块机构。
图8-1-2(2)改变运动副的尺寸通过改变运动副的尺寸,平面四杆机构可演化成具有其他特点功能的机构,如偏心轮机构。
将图8-1-3(a )所示的曲柄滑块机构中的转动副B 的半径扩大,使之超过曲柄AB 的长度,便得到如图8-1-3(b )所示的偏心轮机构。
图8-1-3(a)图8-1-3(b)(3)选用不同的构件为机架机构的倒置指选择运动链中不同构件作为机架以获得不同机构的演化方法,如图8-1-4所示。
图8-1-4 曲柄滑块机构的倒置(4)运动副元素的逆换将移动副两元素的包容关系进行逆换,并不影响两构件之间的相对运动,但却能演化成不同的机构或机构结构形式。
三、平面四杆机构的基本知识1.铰链四杆机构有曲柄的条件(见表8-1-4)表8-1-4 铰链四杆机构有曲柄的条件2.铰链四杆机构的急回运动和行程速度变化系数(见表8-1-5)表8-1-5 铰链四杆机构的急回运动和行程速度变化系数图8-1-5 四杆机构的极位夹角3.铰链四杆机构的传动角和死点(见表8-1-6)表8-1-6 铰链四杆机构的传动角和死点。
《机械原理》第八章第2讲平面连杆机构及其设计PPT课件
设计步骤:
1、计算极位夹角θ θ=180°(K-1)/(K+1)
2、任取一点D为摇杆固定 铰链中心 ,作等腰三角形 C1C2D,两腰长度等于CD, ∠C1DC2=φ 。
1. 按给定的连杆位置设计四杆机构(续)
◆已知连杆长度,要求机构在运动过程中占据图示 B1C1、B2C2、B3C3三个位置,试设计该四杆机构。
设计步骤:
b12
B1
B2
C1 b23
C2
c23 C3
B3
D
A
2020年9月28日
8
2. 按两连架杆的预定位置设计四杆机构
(1)设计方法 机架转换法或反转法:指根据机构的倒置理论,通
满足预定运动的规 律要求机构示例:
利用两连架杆的转 角关系实现对数计算。
对数计算机构
车门开闭机构 动画
2020年9月28日
设计时要求两连架杆的 转角应大小相等,转向相反, 以实现车门的起闭。
4
一、平面连杆设计的基本问题(续)
又称为刚体引导问题 (2)满足预定的连杆位置要求
即要求连杆能依次占据一系列的预定位置。
2020年9月28日
13
2. 按两连架杆的预定位置设计四杆机构(续) ◆给定两连架杆的对应位置设计四杆机构。
已知:连架杆AB和机架AD的长度,两连架杆三组对应 位置AB1 、AB2 、AB3 和DE1、DE2、DE3。 要求:设计该铰链四杆机构。
提示:用机架转换法,既改
取连架杆CD作为机架,原先
的机架AD作为连架杆,则B
第8章 平面连杆机构及其设计
◆平面四杆机构的基本知识
▲铰链四杆机构有曲柄的条件 ▲四杆机构传动角及压力角
◆平面四杆机构的设计
机械原理第8章 平面连杆机构及其设计

∵ C1C2 = C2C1 ,t1>t2 ∴ v2>v1
摇杆的这种运动性质称为急回运动。
2.3 行程速比系数——用来表明急回运动的急回程度, 用K表示。
K v2 v1
C1C2/ t2
C1C2/ t1
t1 t2
(180 (180
) /1 ) /1
180 180
•摆 角——两极限位置所 夹的锐角,用 φ表示。
•极位夹角——当机构在两极限位置时,原动件AB所处两 个位置之间所夹的锐角,用θ表示。
2.2 急回运动
当曲柄以等角速度ω1顺时针旋转时
a) 曲柄 AB1 AB2 摇杆 C1D→C2D
转过1 180
摆过φ,C 点经过C1C2
所用时间:t1
利用死点的机构,如:飞机起落架;工件夹紧机构等。
4.铰链四杆机构的运动连续性
——连杆机构在运动过程中能否连续实现给定的各个 位置的问题。
包括:错位不连续 错序不连续
§8-4 平面四杆机构的设计
1.连杆机构设计的基本问题 按给定运动要求选定机构,并确定其各构件的尺度参数。
1.1 设计要求 (1) 满足预定的运动规律要求
LAB
l
AB1
LBC
l
B1C 1
E1
LCD l C1D
B1
唯一解
A A" A´
F1
E2 E3 D" D´
F2
C1
F
3
D
(2) 按两连架杆预定的对应位置设计四杆机构
-φ φ
α
-φ
-φ
按两连架杆三个对应位置设计四杆机构 已知:机架长度LAD= d、两连架杆对应转角
机械原理(PDF)孙桓 复习笔记chapter8
第8章 平面连杆机构及其设计平面连杆机构及其设计平面连杆机构及其设计 §8—1 1 连杆机构及其传动特点连杆机构及其传动特点连杆机构及其传动特点 1.定义:连 杆 机 构:构件用低副联接而成的机构。
平面连杆机构:组成机构的构件都在相互平行的平面中运动的连杆机构。
空间连杆机构:组成机构的构件不在相互平行的平面中运动的连杆机构。
2.特点: 优:1)低副联接,面接触,磨损小,承载能力大。
2)杆状件,圆柱形或平面形接触面,易制造,传递运动远。
3)运动多样性(转、摆、移、平面运动等) 4)轨迹多样性。
缺:1)设计较困难。
2)运动副的制造误差会累积,从而降低机构的传动精度。
3)惯性力难平衡,不适用于高速。
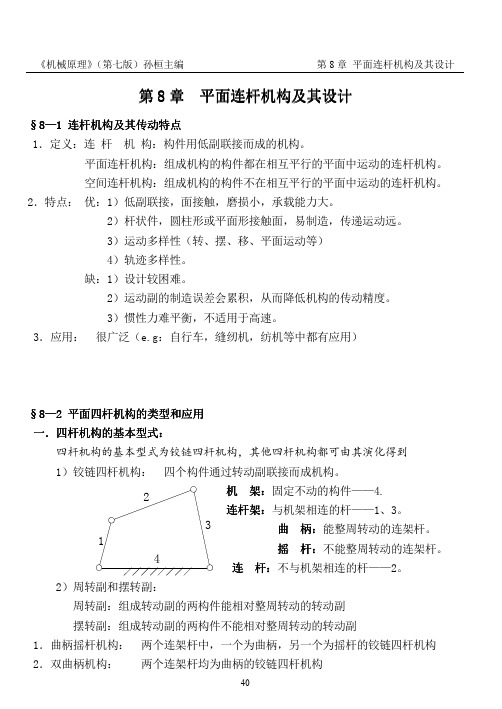
3.应用: 很广泛(e.g:自行车,缝纫机,纺机等中都有应用)§8—2 2 平面四杆机构的类型平面四杆机构的类型平面四杆机构的类型和应用和应用和应用 一.四杆机构的基本型式四杆机构的基本型式::四杆机构的基本型式为铰链四杆机构,其他四杆机构都可由其演化得到 1)铰链四杆机构: 四个构件通过转动副联接而成机构。
机机 架架:固定不动的构件——4. 连杆架连杆架连杆架::与机架相连的杆——1、3。
曲曲 柄柄:能整周转动的连架杆。
摇摇 杆杆:不能整周转动的连架杆。
连连 杆杆:不与机架相连的杆——2。
2)周转副和摆转副:周转副:组成转动副的两构件能相对整周转动的转动副 摆转副:组成转动副的两构件不能相对整周转动的转动副1.曲柄摇杆机构: 两个连架杆中,一个为曲柄,另一个为摇杆的铰链四杆机构 2.双曲柄机构: 两个连架杆均为曲柄的铰链四杆机构12343.双摇杆机构: 两个连架杆均为摇杆的铰链四杆机构二. 平面四杆机构的演化型式平面四杆机构的演化型式 1.改变构件的形状和运动尺寸1234AB CD12312344A A对对对对对对对对(ββ通通A )偏偏对对对对对对(ββ不通通A )l →∞CDββββββ2. 改变运动副的尺寸1234AB3.取不同的构件为机架:对-对对对导导对对摆对对对定对对对手手手4.运动副元素的转换:13241234§8—3 3 平面四杆机构的平面四杆机构的平面四杆机构的基本知识基本知识基本知识 一.铰链四杆机构铰链四杆机构有曲柄的条件有曲柄的条件有曲柄的条件::设:铰四机构ABCD 中,AB 能360°转动的曲柄则:AB 必能转至与机架AD 共线的两个位置A′B′和A″B″,在两共线位置有:a bcdAB C DABCDB′B″C′C″l l ll 1234(a)(b)B′C′B″C″1)a ≤d 时 (图a)∆A′B′D a+ d ≤ b+c a+ d ≤ b+ c a≤b ∆A″B″D b+(d -a) ≥ c => a+ c ≤ b+ d ② => a≤c ① c+(d -a) ≥ b a+ b ≤ c+ d a≤d 2) a >d 时(图6-3b)∆A′B′D a + d ≤ b +c a + d ≤ b +c d ≤ a ∆A″B″D b ≤ c +(a -d ) => b + d ≤ a + c ② => d ≤ b ① c ≤ b +(a -d ) c + d ≤ a + b d ≤ c 1.有曲柄的条件:1)连架杆和机架中有一最短杆2)最短杆和最长杆的长度和不大于其余两杆的长度和。
机械原理——第8章平面连杆机构及其设计

B2
C1
C2
θ=0
对心曲柄滑块机构
6
5 D
ω
2 B
A1
θ
B2
3
B1
4
C
牛头刨床机构
ω
2 B
A1
θ
B2
3 B1
4
C
摆动导杆机构
三、四杆机构的压力角与传动角
γ↑ →Pt↑ →对传动有利。 γ为传动角
为了保证机构良好的传力性能,设计时要求: γmin≥50°
γmin出现的位置:
当∠BCD≤90°时,γ=∠BCD
B’ C’
B
C
A
D
D
A
E
C
B
2.平面四杆机构的演化型式 (1) 改变构件的形状和运动尺寸
曲柄摇杆机构 对心曲柄滑块机构
曲柄滑块机构
偏心曲柄滑块机构
s
φ
s=l sin φ
双滑块机构
正弦机构
(2)改变运动副的尺寸
(3)选不同的构件为机架
偏心轮机构
B
1
2 3
A
4C
曲柄滑块机构
B
1
2 3
A
4C
摆动导杆机构
2、平行四边形机构中有无整转副?选择不同 构件为机架,可获得哪些机构?
3、泛菱形机构中有无整转副?选择不同构件 为机架,可获得哪些机构?
二、急回运动特性
牛头刨床
曲柄摇杆机构
C B
ω
A
偏置曲柄滑块机构
C2
C1
180°+θ ω θ
A
B1
B2
180°-θ
偏置曲柄滑块机构
B
ω
C
机械原理第八章 平面连杆机构及其设计

3. 根据已知条件设计平面四杆机构。
构的方法。
§8-1 连杆机构及其传动特点
一. 连杆机构
连杆机构由若干个构件通过低副连接而组成,又称为低副机构。 共同特点——原动件通过 不与机架相连的中间构件 传递到从动件上。 不与机架相连的中间构件
——连杆(Linkage) 具有连杆的机构——连杆机构
连杆机构根据各构件间的相对运动 是平面还是空间运动分为
运动的机构,从动件正行程的平均速 度慢于反行程的平均速度的现象—— 急回运动(Quick-return)
急回运动机理
a)曲柄转过 118 0
摇杆上C点摆过: C1C2
所用时间:t1
1 1
180 1
b)曲柄转过 218 0
摇杆上C点摆过:C2C1
所用时间:
t2
对心曲柄滑块机构
变连杆 为滑块
B
2
1
A
4
C 摇块
3
双滑块机构
2B
1
A
4
导杆
3
C
2、改变运动副的尺寸:曲柄偏心轮
2
C 扩大转
动副B
2
C 超过
曲柄
B
3 的半径 B
3长
1
1
A 4
DA 4
D
B A1
2C 3
D 4
转动 副B 的半 径扩 大超 过曲 柄长
曲柄滑块机构 偏心轮机构
3、选用不同构件为机架——倒置法
思考:对心曲柄滑块机构 有曲柄的条件?
二、急回运动特性(Quick return property)
1. 概念
极 位 — — 输 出构 件的 极限 位置 摆角φ ——两极限位置所夹的锐角 极位夹角 ——当输出构件在两极位时,原动件所处两个位置
机械原理课件第八章

A D B’ C’ B B’ C’ B
C
C
2) 已知机架AD=50mm的长度,又知连杆BC=30mm的 两个对应的位置,设计四杆机构。
C2
B2
B1
C1
2) 已知机架AD=50mm的长度,又知连杆BC=30mm的 两个对应的位置,设计四杆机构。
C2
B2
B1
C1
3)已知主动件AB的三个位置和连杆上点K所对应的三个 位置,确定连杆上铰链C的位置。
2)行程速比系数
当曲柄转过180°+θ 时,摇杆从C1D位置摆到C2D。 所花时间为t1 , 平均速度为V1,那么有:
t1 (180 ) / V1 C1C2 t1
C1C2 /(180 )
t2 (180 ) /
显然:t1 >t2
当曲柄以ω 继续转过180°-θ 时,摇杆从C2D,置 摆到C1D,所花时间为t2 ,平均速度为V2 ,那么有:
曲柄滑块机构
(1)克服死点的方法
1)利用安装飞轮加大惯性的方法,借惯性作用使机构闯过死点。 2)采用将两组以上的同样机构组合使用,且使各组机构的死点位置 相互错开排列的方法。 折叠桌的折叠机构
(2)死点的应用 例:飞机起落架收放机构
D A C B
(3)按给定的急回要求设计四杆机构
设计铰链四杆机构,设已知摇杆CD的长度LCD=75mm,行程速比系 数K=1.5,机架AD的长度LAD=100mm,摇杆的一个极限位置与机架间 的夹角为φ=45º ,试求曲柄LAB和连杆的长度LBC。
缺点:
① 运动链长,累积误差大,效率低; ② 惯性力难以平衡,动载荷大,不宜用于高速运动; ③ 一般只能近似满足运动规律要求。
《机械原理》-第八章--平面连杆机构及其设计

§ 8-5 多杆机构
1.多杆机构的功用 (1)取得有利的传动角
(2)获得较大的机械利益 (3)改变从动件的运动特性 (4)实现从动件带停歇的运动 (5)扩大机构从动件的行程 (6)使机构从动件的行程可调 (7)实现特定要求下平面导引 结论 由于导杆机构的尺度参数较多,因此它可以满足更为 复杂的或实现更加精确的运动规律要求和轨迹要求。但其设计也 较困难。
c f
A
D
b c f max b c f min c b f min
平面四杆机构的基本知识
假设:
b c fmax a d d>a b c f min d a c b f d a min
a d b c a b c d a c b d
' B'C' D
b2 c 2 (d a)2 arccos 2bc
2 2 2 b c ( d a ) or " 1800 arccos 2bc
平面四杆机构的基本知识
Fr C B
F Ft V C V B F C B
A
B
D
A
D
a e
A
b
B'
α
γ
a
C VC F
多杆机构
2.多杆机构的类型 (1)多杆机构的分类 1)按杆数分 五杆、六杆、八杆机构等; 2)按自由度分 单自由度、两自由度和三自由度多杆机构。 (2)六杆机构的分类 1)瓦特(Watt)型,有Ⅰ型、Ⅱ型两种。
a) 瓦特型
b) 斯蒂芬森型
a) 瓦特Ⅰ型
b) 瓦特Ⅱ型
多杆机构
2)斯蒂芬森(Stephenson)型,有Ⅰ型、Ⅱ型、Ⅲ型三种。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第八章 平面连杆机构及其设计题8-1 试画出图示两种机构的机构运动简图,并说明他们各为何种机构。
在图a 中偏心盘1绕固定轴O 转动,迫使滑块2在圆盘3的槽中来回滑动,而圆盘3又相对于机架4转动;在图b 中偏心盘1绕固定轴O 转动,通过构件2,使滑块3相对于机架4往复移动。
(图a 的机构运动简图可有两种表达方式,绘出其中之一即可)A B(a)O1234ABO 123导杆机构或O曲柄摇块机构题8-1(b)题8-2如图所示,设已知四杆机构各构件的长度a=240mm ,b=600mm ,c=400mm ,d=500mm ,试回答下列问题:1)当取杆4为机架时,是否有曲柄存在?__________若有曲柄,则杆a 为曲柄,此时该机构为__________机构。
2)要使机构成为双曲柄机构,则应取杆_________为机架。
3) 要使此机构成为双摇杆机构,则应取杆_______为机架,且其长度的允许变动范围为_______________.4) 如将杆4的长度改为d=400mm,而其他各杆的长度不变,则当分别以1、2、3杆为机架时,所获得的机构为___________机构。
解:1)因900500400600240=+=+≤+=+d c b a 且最短杆1为连架杆,故当取杆4为机架时,有曲柄存在。
此时该机构为曲柄摇杆机构。
2)要使此机构成为双曲柄机构,则应取最短杆1为机架。
3)要使此机构成为双摇杆机构,则取最杆3为机架,其长度的允许变动范围为: (1)因最短杆1为连杆,即使满足杆长条件,此机构也不能成为双摇杆机构 (2)不满足杆长条件时,b 为最长杆,c 为最短杆,d a c b +>+ 140>c c 为最长杆,但不可能大于三杆长度之和 d b a c ++< 故1340<c综合以上条件, 1340140<<c 时,均可为双摇杆机构。
4)如将杆4的长度改为400,其它杆长度不变,则当分别以1、2、3杆为机架时,因不满足杆长条件,故所获机构均为双摇杆机构。
题8-3 在图示的各四杆机构中,已知各构件的尺寸(由图上量取,图中比例尺μ1=2mm/mm )杆AB 为主动件,转向如图所示。
现要求:1)试给出这三种机构有曲柄的条件和各机构的名称;2)机构有无急回运动?若有,试以作图法确定其极位夹角θ,并计算其行程速比系数K ;3)标出各机构在图示位置时的机构传动角γ和压力角α,求作最小传动角γmin 和最小压力角αmin ,并说明机构的传动性能如何?4)机构是否存在死点位置?解:a)图为曲柄摇杆机构。
杆AB 为曲柄的条件:CD BC AD AB +<+ BC AB < CD AB < AD AB <由图8-3 (a) 两极限位置AB 1C 1D 和AB 2C 2D 可得 极位夹角︒=0θ ,1=K 所以无急回运动。
机构传动角γ和压力角α如图示位置。
最小传动角γmin 位置为AB ″C ″D最小压力角αmin 位置为AB 0C 0D 。
︒=0min α 曲柄为主动件,不存在死点位置。
b) 图为偏置曲柄滑块机构。
杆AB 为曲柄的条件:∞∞+≤+CD BC AD AB 当 0≠e BC e AB ≤+∴ 当 0=e BC AB ≤∴极位夹角C 1AC 2 即︒=2.21θ ,27.1=K 有急回运动。
机构传动角γ和压力角α如图示位置。
最小传动角γmin 位置为曲柄垂直于导路时两位置中AB ″C ″︒=8.38min γ 最小压力角αmin 位置为AB 0C 0。
︒=0min α曲柄为主动件,不存在死点位置。
2题8-3(a)题8-3(c) 图为偏置导杆机构。
杆AB 为曲柄的条件:∞∞+≤+BD AC CD AB 当 0≠e BC e AB ≤+∴ 当 0=e BC AB ≤∴极位夹角B 1AE 即︒=81θ ,64.2=K 有急回运动。
机构传动角γ和压力角α如图示位置。
最小传动角γmin 位置为CB 最短,即CB ″︒=2.48min γ 最小压力角αmin 位置为为CB 最长,即CB ′。
︒=9min α曲柄为主动件,不存在死点位置。
题8-4 图a 所示为一新型杆式曲柄冲压机。
在此冲压机构中,动力是由绕固定轴心A 匀速转动的齿轮1输入,通过分别铰接在齿轮1轮缘上B 处和传动件3上C 处的杆2使杆3柄轴颈3` 和可绕其轴心E 相对转动的连杆4带动冲头5上下往复运动,可使冲头实现快进,低速冲压、高速返回的运动规律。
已知机构的尺寸:l AB =100mm ,l BC =110mm ,l CD =55mm ,l AD =20mm ,l DE =40mm ,l EF =250mm ,现要求:1)试以比例尺μ1=5mm/mm 绘制图示位置的机构的运动简图(图b ),并计算其自由度;2)确定四杆机构ABCD 和DEF 的类型和最小传动角γmin ,并说明此冲压机构的传动性能如何?3)确定该冲压机构的极位夹角θ和行程速比系数K ,并说明此冲压机构的冲头是进快还是返回快?为什么?解:1)5=n 7=l p 0=h p10725323=-⨯-⨯=--=h l p p n F2)ABCD 为双曲柄机构,︒=''=3.45min γγDEF 为对心曲柄滑块机构。
︒=''=8.80min γγ3)极位夹角 ︒=5.58θ 行程速比系数 97.1180180=-︒+︒=θθk题8-5如图所示,设要求四杆机构两连架杆的三组对应位置分别为α1=35°,φ1=50°;α2=80°,φ2=75°;α3=125°,φ3=105°。
另外l AD =80mm 。
试以解析法设计此四杆机构。
解:1)将i α、i φ的三组对应值代入下式(初选000==φα)()()()()[]2001000coscos cos P P P ++-+++=+ααφφφφαα 得 ()2103550cos 75cos 35cos P P P +︒-︒+︒=︒()2108075cos75cos 80cos P P P +︒-︒+︒=︒ ()210125105cos 105cos 125cos P P P +︒-︒+︒=︒ 解之得(计算到小数点后四位)0233.1,2637.1,5815.1210=-==P P P 2)求各杆的相对长度,得5831.121,2515.1,5815.122210=-++======lP n l m P nl P a c n3)求各杆的长度094.101923.635815.1197.101923.635815.1923.632515.18000.80=⨯===⨯======na c m a b l d a m md题8-6 图a 所示为一实验用小电炉的炉门启闭机构,炉门关闭时在位置E1,敞开时在位置E2,试设计一四杆机构来实现炉门启闭的操作。
(1)已选定炉门上的两个铰链B 及C 的位置(图b ); (2)已选定炉壁上的两个固定铰链A 及D 的位置(图c )。
解:1)已选定炉门上的两个铰链B 和C 的位置。
用作图法求出A 及D 的位置,并作出机构在E 2位置的运动简图,如图8-6(1);由图量得:mmCD l mm BC l mmAB l l CD l BC l AB 29033595=⋅==⋅==⋅=μμμ2)已选定炉壁上的两个铰链A 和D 的位置。
用作图法求出B 及C 的位置,并作出机构在E 2位置的运动简图,如图8-6(2)由图量得:mmCD l mm BC l mmAB l l CD l BC l AB 5.2625.1275.92=⋅==⋅==⋅=μμμD B 2AC 1B 1DC 2M 1N 1M 2AD'N 2A'b 12c 12d 12a 12习题8-6(2)习题8-6(1)B 1C 1题8-8图a 所示为一用绳索操作的长杆夹持器,并用一四杆机构ABCD 来实现执握动作。
设已知AB 杆及DE 杆的对应角度关系如图a 所示,且l DE =60mm ,l AD =140mm ,l AB =20mm 。
试以作图法设计此四杆机构。
(保留作图线。
)解:取AD 杆为机架,并以适当比例尺作AD 、AB 与DE 杆的三对对应位置。
作图步骤如图题8-8所示(保留作图线)。
由图量得:mm AB l l AB 20=⋅=μmm AD l l AD 140=⋅=μmm BC l l BC 137=⋅=μ mm CD l l CD 4.38=⋅=μb 12b 13ADB 1C 1E 1B 2B 3E 3E 2B 3′B 2′题8-8题8-9如图所示为一已知的曲柄摇杆CD 和滑块F 连接起来,使摇杆的三个已知位置C 1D 、C 2D 、C 3D 和滑块的三个位置F 1、F 2、F 3相对应(图示尺寸系按比例尺绘出),试以作图法确定此连杆的长度及其摇杆CD 铰接点的位置。
(作图法求解时,应保留全部作图线。
)解:由题意知,本题实际是为按两连架杆(摇杆与滑块)的预定事对应位置设计四杆机构的问题。
具体作图过程如图8-9所示,连杆的长度为mm F E l l EF 2.2711==μA F 1F 2F 3C 1C 2B 3B 2B 1C 3F 3′F 2′E 1题8-9题8-10图a 所示为一汽车引擎油门控制装置。
此装置由四杆机构ABCD 、平行四边形机构DEFG 及油门装置所组成,由绕O 轴转动的油门踏板OI 驱动,可实现油门踏板与油门的协调配和动作。
当油门踏板的转角分别为0°、5°、15°及20°时,杆MAB 相对应的转角分别为0°、32°、52°、及63°(逆时针方向),与之相应油门开启程度为0°(关闭)、14°及60°(全开)四个状态。
现设l AD =120mm ,试以作图法设计此四杆机构ABCD ,并确定杆AB 及CD 的安装角度β1及β2的大小(当踏板转20°,AM 与OA 重合,DE 与AD 重合)。
解:取B 1及B 2为归并点,按点位归并(缩减)法设计此四杆机构(如图8-10)AB 1C 1Db 344量得各杆长度:mm AB95= mm BC 165= mm CD 48= mm AD 120=︒=921β ︒=1162β题8-11如图所示,现欲设计一铰链四杆机构,已知其摇杆CD 的长l CD =75mm ,行程速比系数K=1.5,机架AD 的长度为l AD =100mm ,又知摇杆的一个极限位置与机架间的夹角为ψ=45°,试求曲柄的长度l AB 和连杆的长l BC 。