领航修正航迹
《空中领航学》6.5背电台飞行
按航迹修正角修正航迹的步骤
TKD T未或D未
T已或D已 TKE
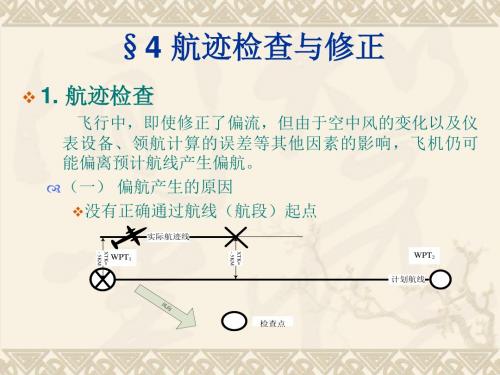
⑴检查航迹
TKE= QDR-MC DA= QDR-MH平=RB-180° ⑵计算ΔTK TKD=D已(t已) /D未 (t未)×TKE
ΔTK=D总(t总)/D未 (t未)×TKE
⑶确定MH应
MH应=MH平-ΔTK
• 课堂练习
MC300°,MH平310°,若RB175°,已飞时间 30′,待飞时间40′,根据ΔTK修正航迹。
• 练2 背台飞行,准确过台后保持MH平142°,测DA时 MH145°,ADF指示183°,则飞机的平均磁航迹角与偏 流为
A MTK 148° DA -6°
B MTK 145° DA +3°
✔C MTK 148° DA +6°
• 练3 飞机准确过台后,操持MH平150°沿磁航线角152° 的航线飞行,飞行一段时间后,RMI指针尾部平均为 155°,则实际DA大约为
2020年09月
6.5 背电台飞行
6.5 背NDB/VOR台飞行
飞机飞越电台后,利用后方电台测定 的航行元素来保持飞机沿预定航线跟踪航 迹或切入航线的飞行方法。
6.5 背NDB/VOR台飞行
➢ 背电台检查航迹
准确通过电台上空 未准确通过电台上空
➢ 背电台修正航迹
一、背电台检查航迹
(一)准确通过电台上空
• ⒊掌握背台按航迹修正角修正航迹的方法; • ⒋掌握背台切入航线或指定方位线的方法; • ⒌掌握用CDI和HSI计算QDM、QDR的方法。
方位指示器形式
⑴无线电罗盘(刻度盘固定) ⑵ADF指示器(刻度盘可人工转动) ⑶无线电磁指示器(RMI)
(RBI)
VOR方位指示器形式
空中领航学:第9章 领航的准备与实施

6
7
最低安全高度(MSA)
(Minimum Safe Altitude)
是指确保飞机不致与地面障碍物相撞的最低飞行高 度。 MSA=最高障碍物高+最小超障余度
最小超障余度(MOC)(Minimum Obstruction Clearance):飞机飞越障碍物上空时必须具有的最 小垂直距离(安全真高)。我国规定,在平原和 丘陵为400米,在山区为600米。
并预达时间。 确定偏流的方法有:
按预报风求偏流; 背电台飞行求偏流。
22
2、检查航迹 (Checking Track)
进入航线后,由于多种原因,飞机的航迹会 偏离预定航线,出现方向和距离偏差,飞行 中应不断地检查航迹。 (1)方向检查 (2)距离检查
23
24
(1)方向检查
(Checking Direction)
3
(1)画航线; (2)量航线角和航线距离 (3)标记航线基本数据; (4)标记领航有关资料,包括:
导航点及无线电方位线和数据; 高大障碍物(指航线两侧25公里范围); 磁差、空中禁区、空中走廊、强磁区。 完成作业后, 应将航线角、距离和最低高度等填 入飞行记录表内。
4
领航计划 空中领航计算表
5
(Flying along course)
1、进入航线 2、检查航迹 3、修正航迹 4、爬升计算 5、下降计算
21
1、进入航线(Entering Course)
是指引领飞机正确通过起点(转弯点),并按 应飞航向沿预定航线飞行。
主要工作是: 准确通过起点(转弯点); 按应飞航向飞行; 记下通过位置、时间
correcttrack28climbingcalculation1计算爬升所需时间2计算改平时刻和改平点位置爬升率爬升高度爬升descendingcalculation1计算下降所需时间2计算下降时刻和下降点位置下降率下降高度下降下降下降下降终点下降gst30arrivaltime1计算好起飞和飞越各航路点检查点转弯点终点的时刻准时起飞
6.4航迹检查与修正.
五凤溪
飞机从温江飞往罗江,MC46°,
D1=53Km,D2=40Km, 过温江后,飞行 员记录MH平42 °,飞机从检查点高坪铺 (位于航线上)右侧3Km通过,请确定 改航直飞罗江的航向?
高骈铺
53 46° 40
温江
罗江
XTK+3km
TKE+3°、TKD+4° MTK=MC+TKE=49° DA=MTK-MH平=+7
TKE=arctan(XTK/S已) ,TKD=arctan(XTK/S未) MTK=MC+TKE DA=MTK-MH MC新=MC原-TKD MH应= MC新-DA (改航前后DA变化不大,可以将此实 测DA作为新航线的预计飞行的DA来修正飞机的航向) 飞机在检查点后把航向调整为MH修可准确飞往目的地上 空
MH修= MC新-DA
DA可由航行速度三角形求出
偏离角(TKD:Deviation of Track Angle) :预 定航线与修正航线的夹角, TKD=MC原- MC新 ,左偏为负,右偏为正
Nm 检查点
MC
甲
MH修
XTK
MC新
TKD
S未
乙
修正步骤:
在检查点确定偏航情况,计算TKE,TKD
仁寿
10:00 9km 10:16
大足
73 104°
83
资中
2.航迹修正
飞行中发现偏航后,应对航迹进行修正,即重新 计算确定应飞航向,使修正后的航迹能够准确地、 准时地通过预定点 。 (一)方向修正: 按新航线角修正航向 按航迹修正角修正航向
(1)按新航线角修正航向
飞机在检查点时已经获得实际偏流DA
课堂练习
超低空飞行领航的实施及注意事项分析

超低空飞行领航的实施及注意事项分析摘要:近年来,超低空飞行在各国的军事、民用航空领域得到了广泛的应用。
本文通过对超低空领航特点分析,提出了飞行前做好领航准备的具体内容,精准实施超低空领航的方法,以及飞行中的注意事项。
关键词:超低空飞行;领航能力;特点;注意事项超低空飞行是指飞行高度距离地面100m以下。
超低空飞行时空气密度大,发动机推力大,飞机空气动力性能优越,操作性能好。
超低空飞行在军事和民航领域中得到一定的重视。
从军事领域看,超低空作战形式已经成为航空兵的主要战术形式之一。
从民航领域看,超低空飞行大面积农作物施药除草、防病虫鼠害、扑灭飞蝗、人工增雨等方面有着不可替代的作用,社会经济效益显著。
1超低空飞行领航特点概述1.1 利用地标定位超低空飞行时,地标参照物更加清晰,易于分辨出来,容易定位;超低空飞行大多在云下实施,观察地标的机会、可利用的有效地标也比中空多,容易识别人工标志。
但超低空飞行,视界缩小,地面起伏对观察地标影响增大,导致对于地标全貌和相关位置判定存在一定误差;相对移动角速度比中空快,观察地标时间缩短,辨认地标,关键在于掌握准确航迹方向,主要依据它本身特点(如城市中高耸的建筑物等),对没有明显特点小地标,要注意它的细小特点,防止把小地标误认为大地标。
1.2 使用无线电领航设备定位超低空飞行,使用各种无线电设备受地波的绕射和反射的影响,其准确性降低;各种超短波无线电领航设备(如地面雷达和超短波定向台),电磁波传播受地形影响有效距离显著缩短,能够利用它们来定位的机会比中空减少,但机载雷达地面回波增强,能见地标影像比中空增多,如一些小河流、河湾、城镇、工厂、桥梁和机场等,能在荧光屏上显示出来,可以充分利用雷达地标定位,弥补目视距离近而看不清地标全貌的不足。
1.3 测量偏流、地速超低空测量偏流和地速,除了自动测量偏流和地速设备外,也可能采用其它设备进行操作。
比如:用光学瞄准具测偏流,由于所观察的范围很小,多采用大观测角差法和平行法;用雷达测偏流,机上雷达荧光屏上影像多,而且比较清晰;使用多普勒效应法测量偏流时,天线俯角置于0°左右较为适宜。
航迹的名词解释

航迹的名词解释航迹,是指飞行器在空中所留下的路径,也可以简单理解为航空器的轨迹或飞行轨迹。
航迹是航空运输中一个重要的概念,它不仅包含了飞机在空中的路线,还涵盖了飞行中所需的各种信息。
一、航迹的组成航迹的组成主要包括航向、航线、飞行高度和速度。
航向是指飞机相对于地球正北方向的指向,通常用度数表示。
航线是指飞机在空中的规划路径,包括离场航线、航路和进场航线。
飞行高度是指飞机相对于地面的垂直高度,通常以英尺或米表示。
速度是指飞机在空中飞行的速率,通常以节(knots)表示。
二、航迹的规划与调整航迹的规划与调整是航空运输中至关重要的一环。
在航迹规划阶段,航空公司或航空管制部门会考虑飞机的起飞和降落机场、空中航线、天气条件、飞行高度和燃油消耗等因素,制定合理的航迹计划。
航迹规划需要综合考虑飞行安全、效率和经济性,以确保航班的顺利进行。
在飞行过程中,由于天气变化或者空中交通控制需要,航迹可能需要进行调整。
航空管制员会根据实际情况提供航迹变更指令,飞行员需要根据指令调整飞行航迹。
航迹调整不仅要满足安全要求,还需要考虑航班的效率和准时性。
三、航迹的影响因素航迹的形成和选择受到多种因素的影响。
首先,地理因素会对航迹的选择产生影响。
地形、地势高度以及地理位置等因素会直接影响航迹的规划和调整。
其次,气象因素也是航迹的重要决定因素。
例如,风向风速、大气层结和天气状况等都会对航迹的选择和调整产生影响。
此外,航空管制和空中交通流量管理也会对航迹产生影响。
航空管制部门会根据航班需求和空中交通情况进行航迹调整和安排,以确保航班的安全和顺利进行。
四、航迹的优化和飞行效率航迹的优化是航空运输业努力追求的目标之一。
通过优化航迹规划和调整,可以提高飞行的效率,同时减少燃油消耗和环境污染。
航空公司和航空管制部门一直在寻求各种优化手段,如直飞航线规划、高度优化选择和节能飞行方式等,以提高航班运营效率和减少飞行成本。
在航迹优化的过程中,科技的进步起到了重要的作用。
6.4航迹检查与修正

向
检查点
(二)偏流变化或偏流修正不正确导致偏航
实际偏流变大或修正偏流过小
偏流修正反了
TAS
WS
WDN MTK=MC
DA
WDM
WS
WA
(三)航向保持不准确
NM NT
GS
实际偏流变小或修正偏流过大
(二)判断检查偏航情况并计算航迹角
偏航距离(XTK—Cross Track Error) 飞机到航线的垂直距离。“左负右正”
(四)飞行时间检查
飞行中,利用适当距离上与航线近于垂直(交角
一般在60°~120°之间)的线状地标,可以进 行时间检查 。
(五)
全面检查
地标罗盘领航,若航线较长时,常在航线附近选择1~2
个位置适当的显著地标作为检查点,进行全面检查。全 面检查的实施步骤和方法 选择检查点 记录飞越检查段起点时刻 保持航向、高度等参量飞行 提前辨认检查点,记下飞越时刻和偏航距离 求出偏航角、航迹角、偏流和地速
MH修= MC新-DA
DA可由航行速度三角形求出
偏离角(TKD:Deviation of Track Angle) :预 定航线与修正航线的夹角, TKD=MC原- MC新 ,左偏为负,右偏为正
Nm 检查点
MC
甲
MH修
S未
TKD 乙
XTK
MC新
修正步骤:
在检查点确定偏航情况,计算TKE,TKD
TKE=arctan(XTK/S已) ,TKD=arctan(XTK/S未) MTK=MC+TKE DA=MTK-MH MC新=MC原-TKD MH应= MC新-DA (改航前后DA变化不大,可以将此实 测DA作为新航线的预计飞行的DA来修正飞机的航向) 飞机在检查点后把航向调整为MH修可准确飞往目的地上 空
飞行器导航与控制系统中的目标跟踪与航迹规划优化

飞行器导航与控制系统中的目标跟踪与航迹规划优化导航与控制系统在飞行器中起到至关重要的作用,它能够确定飞行器的目标位置,规划合适的航迹,并控制飞行器准确地沿着预定航迹飞行。
然而,在实际飞行任务中,由于环境的不确定性和飞行器的动力学特性,目标跟踪与航迹规划的优化一直是一个挑战。
目标跟踪是将飞行器准确地定位在所需位置的过程。
对于飞行器导航与控制系统来说,它需要实时获取飞行器当前位置和目标位置之间的误差信息,并通过控制系统来修正这些误差,使飞行器能够准确地到达目标位置。
常用的目标跟踪算法包括比例-积分-微分(PID)控制器和模型预测控制器等。
在飞行器的导航与控制系统中,航迹规划的优化是使飞行器能够按照一条最佳的路径到达目标位置。
航迹规划的目标是在考虑飞行器动力学特性、环境约束和任务要求的前提下,找到一条能够使飞行器在最短时间内到达目标位置的最佳路径。
常见的航迹规划算法包括A*算法、遗传算法和模拟退火算法等。
优化飞行器导航与控制系统中的目标跟踪与航迹规划需要考虑以下几个关键问题:环境感知、路径生成和控制策略。
首先,环境感知是指飞行器导航与控制系统对周围环境的感知能力。
为了能够准确地进行目标跟踪和航迹规划,飞行器需要实时获取周围环境的信息,例如地图、障碍物和其他飞行器的位置等。
现代飞行器通常配备有各种传感器,如全球定位系统(GPS)、惯性导航系统(INS)和视觉传感器等,以提供准确的环境感知能力。
其次,路径生成是指根据飞行器当前位置和目标位置,在考虑环境约束的情况下,生成一条适合飞行器的路径。
这个过程通常可以分为两个步骤:全局路径规划和局部路径规划。
全局路径规划通过搜索算法来找到飞行器从当前位置到目标位置的大致路径,而局部路径规划则通过动态规划算法在飞行中实时调整飞行器的航迹,以适应周围环境的变化。
最后,控制策略是指根据目标跟踪误差和航迹规划来生成控制信号,以驱动飞行器执行所需的动作。
控制策略可以根据任务要求和飞行器的动力学特性进行选择,常用的控制策略包括PID控制器、线性二次调节器和模糊控制器等。
《空中领航学》7.3.2沿基线转弯(修正角航线)飞行
风的修正
修正风对四转弯开始位置无线电方位的影响
Δβ≈t90°·57.3°/(L+R入)×WS2
出航下降率的修正
RD=( HIAF -H入)/t应 =Δ H/t应
入航转弯时机的判断
利用出航时间检查
入航转弯时机的判断
已经确认飞机在以电台为圆心的25NM(46km)进场扇区内, 则先切入出航航迹反向延长线(即方位线)上,沿方位线飞行, 过台后直接加入基线转弯(修正角航线)。
修正角航线的加入
沿等待航线任意方向加入
等待航线
第一扇区
φ IAF
第三扇区
第二扇区
过渡 基线转弯
修正角航线风的影响与修正
沿基线转弯(修正角航线)作起始进近的过 程中,由于风的影响,飞机的实际航迹将偏离预 定航线,使实际的航线变宽或窄、长或短,使飞 机在完成入航转弯改出时不能准确地切到五边向 台航迹上飞行。如果航线过窄或过短,将造成五 边向台进近着陆的困难,不能安全着陆;如果航 线过宽过长,有可能使飞机偏出规定的安全保护 区而危及飞行安全。
203°(C、D类) 切入到五边进近(跑道延长线)的 向台高度:修正海压高700m 最后进近定位点:DME台(WHA) 7.5NM处 入航航段的向台航迹:44° 第二次过LMM台高度:决断高度
沿修正角航线起始进近实施程序和步骤
⒈在取得进场许可和进场条件后,沿指定进场航线飞 向IAF,进行修正角航线的计算(重点为风的修正),
基线转弯(修正角航线)构成
MC出
入航转弯
φ IAF
MC入
基线转弯(修正角航线)的起始进近定位点IAF必须是一个 导航台,由出航航迹(背台边)、基线转弯(入航转弯)和向 台航迹(入航航迹)构成
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文献标题:第06章第3节修正航迹一级类目:空中领航学(领航员)二级类目:推算结合地标领航文献类型:教材[文献信息]关键词: 修正航迹文献摘要: 无正文浏览:第三节修正航迹检查航迹后,如果发现航迹偏离了预定航线,不能准确地通过预定点,不能按预定的时刻到达预定点,就应当适时地修正航迹。
所谓修正航迹,就是重新确定应飞航向,使修正后的航迹通过预定点,并采取一定措施,使飞机按预定时刻到达预定点。
前者叫方向修正;后者叫距离修正。
距离修正将在第十四章中介绍。
本节只研究方向修正的一般方法,主要有:按实测偏流修正航迹、按偏离角修正航迹和按航迹修正角修正航迹。
一、按实测偏流修正航迹飞行中,在测量偏流以后,如果发现新测的偏流与原来的偏流不一样,并确信新的偏流正确时,为了不使飞机偏离航线过远,应当根据新偏流,重新计算应飞航向修正航迹,使航迹与原航线平行,如图6-15所示。
新的应飞航向仍可按航线角减偏流来计算。
图6-15 按实测偏流修正航迹例如,航线从咸阳到潼关,磁航线角84°,进入航线时,测得偏流+8°,求得应飞磁航向76°,修正罗差+4°,求得应飞罗航向72°。
飞行中,测量偏流检查航迹,由于风发生变化,新测得偏流为+10°,按新偏流重新计算应飞磁航向为74°,换算成应飞罗航向为70°。
新的应飞航向,也可以在原来的应飞航向的基础上,修正一个偏流差来求得,即(6·6)式中ΔPL可用(6·1)式求出,原偏流相当于PL1,新偏流相当于PL2。
例如,上例中,偏流差为+2°,原来的应飞罗航向为72°,在此基础上修正偏流差,求得新的应飞罗航向为70°。
这样做,与按前一种方法的计算结果是一样的。
上述两种方法,实际工作中都可采用。
按实测偏流修正航迹,实施比较简单。
飞行中,测出偏流,计算出应飞磁航向,换算成应飞罗航向,通知飞行员保持即可。
在风多变的地区(如飞越山区、大河,穿越锋面等)或改变高度飞行时,为了及时修正风的变化的影响,减小偏航,常采用按实测偏流修正航迹。
二、按偏离角修正航迹(一)原理飞行中如发现飞机已偏离了原航线,并确定了精确位置,就要从新的飞机位置开始,确定新的航线,并求出新的航线角和应飞航向,使飞机沿航线飞往预定点。
图6-16 按偏离角修正航迹新航线角,可以用向量尺直接从地图上量取。
但通常情况下,是根据原航线和新航线之间的夹角——偏离角(PI)计算得出。
飞机偏在原航线右侧时,规定偏离角为正,反之为负,如图6-16。
飞行中,只要求出了偏离角,就可以求出新航线角,并计算出新的应飞航向,从图中可以看出(6·7)(6·8)需要说明,上述求应飞航向公式中的偏流,应是应飞航向上的偏流。
由于航向改变不大于(V/U)°时,偏流的变化很小。
所以,在实际工作中,求应飞航向时所用的偏流,常用检查点前测得的偏流来代替,这样做,对修正航迹的准确性影响很小。
如果航向改变量较大或检查点前、后风发生变化,则应及时测量偏流,用实测的偏流作补充修正。
(二) 偏离角的求法1、用向量尺量偏离角可以用向量尺从地图上量取。
如图6-17所示,用量距尺的上缘压住飞机位置和预定点,使上缘代表新航线,然后转动辅助标尺,使其平行线与原航线平行,标尺尖端在量角器上所对的刻划,就是偏离角。
图6-17 用向量尺量偏离角2、用计算尺算偏离角也可以根据偏航距离和未飞距离用计算尺来计算。
如图6-18所示,偏航距离(S P)是飞机偏离航线的距离。
规定偏右为正,偏左为负。
未飞距离(S未)是飞机位置与预定点间沿航线方向上的距离。
图6-18 按偏航距离求偏离角从图中可以看出(6·9)把上式变换得(6·10)依据这一比例关系,用计算尺上的正切尺就可以将偏离角计算出来,尺形如图6-19所示。
图6-19 用计算尺计算偏离角例如,S未=67公里,S P=+9公里,可以算出PI≈+8°。
3、心算由于小角度的正切、正弦函数值,约等于该角度的弧度值,而偏离角一般都比较小,所以(6·9)式可以写成(6·11)这就是心算偏离角所依据的公式。
式中,S未确定后,60°/S未是一个常数,它等于偏航1公里时偏离角的度数。
这个数值,通常称为偏离角系数(C PI),单位是度/公里。
偏离角系数除了可以直接按60°/S未计算外,也可以用计算尺计算。
在图6-19中,令S P=1公里,所求得的PI值,就是偏离角系数。
为了便于迅速地心算,平时应当熟记若干个未飞距离的偏离角系数(见表6-1)。
偏离角系数表6-1飞行中,确定了飞机位置,求出偏航距离后,和偏离角系数相乘,其积就是偏离角。
即公式(6·12)如上例,S未=67公里,可知C PI=09,S P=+9公里,故PI≈+8°。
需要指出,用计算尺或心算求偏离角时,它的正负和偏航距离的正负是相同的。
上述三种求偏离角的方法,各有优缺点。
用向量尺量,不需要计算,适于空中临时修正使用,不足之处是必须在地图上准确地标记飞机位置后才能量得准,且量角需要用较多的时间。
用计算尺算虽然准确,但比较麻烦,因而不常使用。
心算具有迅速、简便的优点,是常用的方法。
(三)实施步骤(以心算法为例)1、地面准备时,根据检查点的未飞距离,求出偏离角系数,并同检查点的偏航距离一起标记在地图上(如图6-18);2、飞临检查点前,准确地测量出偏流;3、到达检查点时,确定飞机位置,在地图上打“×”、记时;4、求出偏航距离、偏离角、新航线角和应飞航向;5、通知飞行员修正航向;6、预计到达下一预定点的时刻,并检查修正后航向的保持情况。
例如,航线从咸阳到潼关。
原航线角为84°,检查点渭南的未飞距离为67公里,求得偏离角系数为09,飞行中测得偏流+8°,11.57′飞机到达渭南,测得飞机离渭南的水平距离为+15公里,渭南本身偏离航线-6公里,求得新应飞磁航向为68°,再修正罗差+4°,得应飞罗航向为64°,将此航向通知飞行员修正航向。
已知地速为440公里/小时,预计到达潼关的时刻为12.06′。
飞行员修正航向后,检查航向的保持情况。
(四)使用时机按偏离角修正航迹,只要有准确的位置和偏流,就能求出准确的应飞航向。
由于它不需要考虑已飞航迹的情况,所以,它是飞过航迹不规则时修正航迹的主要方法。
三、按航迹修正角修正航迹(一)原理在沿航线飞行的过程中,如果保持的航向不变,风也稳定,并先后确定了两个实测位置,那么,它们之间的连线必然是这段飞行时间内的平均航迹,如图6-20中的AB。
当飞机偏离预定航线后,如果继续保持原来的平均航向飞行,飞机将不能沿新航线BC到达预定点C。
飞过航迹的延长线同新航线之间的夹角,叫航迹修正角(XZ)。
当航迹延长线偏在新航线右侧时,规定修正角为正;偏在左侧时为负。
从图中可以看出,要想使飞机沿新航线飞到预定点,必须将已飞航迹改变一个航迹修正角。
图6-20 航迹修正角由于已飞航迹是平均航迹,而且它是保持某一平均航向的结果(如图6-21),所以,要改变平均航迹,必须改变平均航向。
又由于当航向改变不大于(V/U)°时,偏流变化很小,可认为航向改变量与航迹角改变量是相等的。
所以,新的应飞航向,应该在原来保持的平均航向的基础上减去一个航迹修正角后求得,即(6·13)或(6·14)图6-21 按航迹修正角修正航迹需要指出,这种求应飞航向的方法是以偏流不变为前提的。
当航向改变量较大或检查点前、后风发生变化时,也应和按偏离角修正航迹一样,在修正航迹后,及时测量偏流,并按实测的偏流作补充修正。
补充修正时一般按(6·6)式计算应飞航向。
其中,偏流差等于检查点后实测的偏流与检查点前的平均偏流之差。
(二) 航迹修正角的求法1、用向量尺量航迹修正角用向量尺直接量取较为简便、实用。
如图6-22,用量距尺的上缘压住地图上标定的两个飞机位置,使它代表平均航迹,然后转动辅助标尺,使其平行标线与新航线平行,从标尺尖端在量角器上所对的刻划处就可以读取航迹修正角。
图6-22 用向量尺量航迹修正角例如,航线从咸阳飞往潼关,飞机脱离咸阳时偏左2公里,到达检查点渭南时,向左测得飞机离渭南的水平距离为15公里(S=+9公里),确定位置后,用向量尺量得XZ为+17°。
2、用计算尺算航迹修正角也可以用计算尺算。
从图6-23可以看出,航迹修正角是△ABC的外角,它等于偏离角(PI)和偏航角(PH)之和,即(6·15)图6-23 按偏航距离求航迹修正角从(6·9)式可知(6·16)S已是第一位置A和第二个位置B间沿航线方向上的距离。
根据推证(6·10)式的道理,可以从(6·16)式推得(6·17)依据这一比例关系,可以用正切尺计算偏航角,尺形如图6-24所示。
图6-24 用计算尺计算偏航角按已飞距离、未飞距离、偏航距离算出了偏航角、偏离角之后,将它们相加,其和就是航迹修正角。
例如,航线同前例,飞机准确通过咸阳市正上空,到达渭南时,测得S P+9公里,因为S已为74公里,求得PH为+7°;S未为67公里,求得PI为+8°,将其相加,求得XZ为+15° 。
3、心算心算公式为(6·18)这就是心算航迹修正角所依据的公式。
式中60°/S未是偏离角系数C PI。
同理,把60°/S已叫做偏航角系数,用C PH表示。
它的求法,和求偏离角系数的方法相同。
表6-1也可当偏航角系数来使用。
偏航角系数和偏离角系数之和,即(6·18)式中的(60°/S未)+(60°/S未) 叫做航迹修正角系数,用C XZ 表示,即(6· 19)这样,(6·18)式可写成(6·20)在航线检查点确定后,航迹修正角系数也是一个常数,它实际上是偏航1公里时航迹修正角的度数。
为了在飞行中能够迅速地心算出航迹修正角,飞行前,应算出并记住航迹修正角系数。
飞行中,测出偏航距离后,同系数相乘,其积就是航迹修正角。
例如,航线同前例,S已=74公里,S未=67公里,可知C PH=0.8,C PI=0.9,C XZ=0.8+0.9=1.7,飞行中,测得S P+9公里,故XZ≈+15°。
4、第一个位置不在航线上时航迹修正角的求法上面讲的后两种求航迹修正角的方法,都是假定第一个位置在航线上。
如果第一个位置不在航线上(图6-25),除了通常用向量尺量航迹修正角外,也可以用计算的方法求航迹修正角。