单片机串口发送数据帧_0
单片机数据传送指令c语言

单片机数据传送指令c语言单片机是一种集成电路,也称为微控制器。
它内部集成了处理器、存储器和各种外围设备接口,并且可以通过程序来控制其工作。
在单片机编程过程中,数据传送指令是常用的指令之一。
数据传送指令用于在单片机中传输数据,可以实现寄存器之间的数据传递、数据移动和数据保存等功能。
下面我将详细介绍单片机数据传送指令的使用方法。
首先,我们需要了解数据传送指令的基本格式。
数据传送指令通常以下面的形式出现:MOV destination, source。
其中,destination表示目标操作数,source表示源操作数。
要执行一条数据传送指令,首先需要确定传输数据的源和目标,然后根据具体需求选择合适的寻址方式来指定源和目标的地址。
下面我将介绍几种常用的寻址方式。
第一种寻址方式是立即寻址(Immediate Addressing)。
在立即寻址中,source指定了一个立即数,表示需要传送的数据。
立即数是在指令中给出的常数值,可以直接传送到目标寄存器或内存地址中。
例如,MOV A, #15表示将立即数15传送到A寄存器中。
第二种寻址方式是直接寻址(Direct Addressing)。
直接寻址中,source 指定了一个源寄存器或内存地址,将该寄存器或内存地址中的内容传送到目标寄存器或内存地址中。
例如,MOV A, B表示将B寄存器中的内容传送到A寄存器中。
第三种寻址方式是寄存器间接寻址(Register Indirect Addressing)。
在寄存器间接寻址中,source指定了一个寄存器的地址,将该寄存器中的内容传送到目标寄存器或内存地址中。
例如,MOVX @DPTR, A表示将A 寄存器中的内容传送到DPTR寄存器指向的内存地址中。
第四种寻址方式是间接偏移寻址(Indirect Offset Addressing)。
在间接偏移寻址中,source指定了一个源寄存器和一个偏移量,将源寄存器地址加上偏移量得到的地址中的内容传送到目标寄存器或内存地址中。
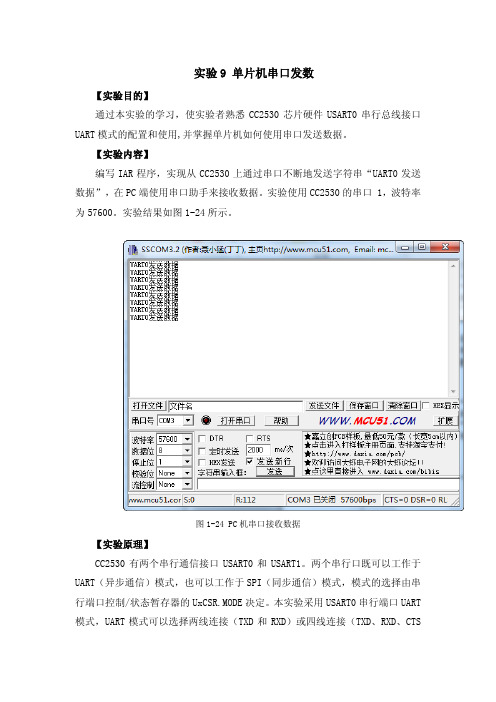
实验9 单片机串口发数
while(1) {
if(*str == '\0') break; // 遇到结束符,退出 UART0SendByte(*str++); // 发送一字节 } }
*
数据位:8
*
停止位:1
*
奇偶校验:无
* 入口参数:无
* 出口参数:无
* 返 回 值:无
********************************************************************/ void initUART0(void) {
/* 片内外设引脚位置采用上电复位默认值,即PERCFG寄存器采用默认值 */ PERCFG = 0x00; //位置 1 P0 口 /* UART0相关引脚初始化
********************************************************************/ void UART0SendByte(unsigned char c)
{
U0DBUF = c;
// 将要发送的1字节数据写入U0DBUF(串口 0 收发缓冲
器)
}
/******************************************************************** * * 函数名称:main * 功 能:main函数入口 * 入口参数:无 * 出口参数:无 * 返 回 值:无
串口上电发送0x00的解决方法

串口上电发送0x00的解决方法
串口上电发送0x00的问题可能是由于多种原因引起的,包括硬
件和软件方面的问题。
以下是可能的解决方法:
1. 确保串口连接正确,首先要确保串口连接是正确的,包括接
线和引脚连接。
检查串口线是否连接到正确的串口引脚,确保没有
接触不良或者接线错误。
2. 检查串口设置,确认串口的波特率、数据位、停止位和校验
位等设置是否与目标设备的要求一致。
如果设置不正确,可能会导
致发送0x00的问题。
3. 检查串口驱动程序,确保安装了正确的串口驱动程序,并且
驱动程序是最新版本。
有时旧版本的驱动程序可能会导致通讯问题。
4. 检查上电过程中的初始化,如果使用的是嵌入式系统或者单
片机,需要确保在上电过程中正确初始化串口相关的寄存器和参数,以确保串口正常工作。
5. 排除软件问题,检查发送0x00是否是由软件程序引起的。
可能是程序中的一个bug导致了发送0x00的情况,需要仔细检查程序逻辑和代码。
6. 使用示波器检测信号,如果以上方法都没有解决问题,可以使用示波器检测串口信号,查看上电时串口信号的波形,以确定是否存在异常。
总之,解决串口上电发送0x00的问题需要综合考虑硬件和软件方面的因素,逐一排查可能的原因,并逐步解决。
希望以上方法对你有所帮助。
单片机 串口通信原理

单片机串口通信原理
单片机串口通信是指通过串行口进行数据的传输和接收。
串口通信原理是利用串行通信协议,将数据按照一定的格式进行传输和接收。
在单片机中,串口通信一般是通过UART(通用异步收发传输器)模块来实现的。
UART模块包括发送和接收两部分。
发送部分将数据从高位到低位逐位发送,接收部分则是将接收到的数据重新组装成完整的数据。
串口通信的原理是利用串行通信协议将发送的数据进行分帧传输。
在传输的过程中,数据被分成一个个的数据帧,每帧包括起始位、数据位、校验位和停止位。
起始位和停止位用于标识数据的开始和结束,数据位则是用来存放需要传输的数据。
校验位用于校验数据的正确性。
在发送端,单片机将需要发送的数据按照一定的格式组装成数据帧,然后通过UART发送出去。
在接收端,UART接收到的数据也是按照数据帧的格式进行解析,然后重新组装成完整的数据。
通过这样的方式,发送端和接收端可以进行数据的传输和接收。
串口通信具有简单、可靠性高、适应性强等优点,广泛应用于各种领域,如物联网、嵌入式系统等。
掌握串口通信原理对于单片机的应用开发具有重要意义。
单片机中的串口通信技术

单片机中的串口通信技术串口通信技术是指通过串行接口将数据传输和接收的技术。
在单片机领域,串口通信是一种常见的数据交互方式。
本文将介绍单片机中的串口通信技术,并探讨其在实际应用中的重要性。
一、串口通信的原理串口通信是指通过串行接口传输数据的方式,其中包括一个数据引脚和一个时钟引脚。
数据引脚用于传输二进制数据,在每个时钟周期内,数据引脚上的数据会被读取或写入。
时钟引脚则用于控制数据的传输速度。
单片机中的串口通信主要包含两个部分:发送和接收。
发送时,单片机将数据转换为二进制形式,并通过串口发送出去。
接收时,单片机会从串口接收到二进制数据,并将其转换为可识别的格式。
通过发送和接收两个过程,单片机可以与外部设备进行数据交互。
二、串口通信的类型在单片机中,串口通信主要包含两种类型:同步串口和异步串口。
同步串口是指发送和接收两个设备之间使用相同的时钟信号,以保持数据同步。
同步串口通信速度快,但需要额外的时钟信号输入。
异步串口则是通过发送数据前提供起始位和终止位来区分不同数据帧的方式进行通信。
异步串口通信的优势是不需要额外的时钟信号,但速度相对较慢。
在实际应用中,通常使用异步串口通信。
异步串口通信相对简单易用,适合多种应用场景。
三、单片机串口通信的实现单片机中实现串口通信通常需要以下几个方面的内容:1. 串口通信引脚配置:单片机需要连接到一个串口芯片或者其他外部设备,因此需要配置相应的引脚作为串口通信的数据引脚和时钟引脚。
2. 波特率设置:波特率是指单位时间内传输的数据位数。
在进行串口通信时,发送端和接收端的波特率需要相同。
单片机中通常通过寄存器设置波特率,以确保数据传输的稳定性。
3. 数据发送和接收:在单片机中,通过将数据写入发送缓冲器并启动发送操作来发送数据。
接收数据时,单片机会接收到串口中的数据,并将其保存在接收缓冲器中。
4. 中断机制:在进行串口通信时,单片机通常会使用中断机制来处理数据接收和发送。
中断机制可以减轻单片机的负担,提高系统效率。
单片机指令的串口通信实现方法
单片机指令的串口通信实现方法串口通信是指通过串行通信接口实现的数据传输方式。
在单片机系统中,串口通信是一种重要的通信方式,可以实现与外部设备(如PC 机、传感器等)的数据交互。
本文将介绍单片机指令的串口通信实现方法,包括硬件连接和软件编程两方面。
一、硬件连接串口通信需要通过发送器和接收器两个设备来完成数据的发送和接收。
在单片机系统中,可使用通用异步收发器(UART)作为串行通信接口。
下面是串口通信的硬件连接步骤:1. 将单片机与UART连接:首先,确保单片机具有UART接口,并根据其引脚定义将UART的发送线(TXD)连接到单片机的接收引脚,接收线(RXD)连接到单片机的发送引脚。
2. 选择波特率:波特率指每秒钟传送的位数,通常使用的波特率有9600、115200等。
在发送和接收数据时,单片机和外部设备需要使用相同的波特率,以保证数据的正确传输。
3. 连接外部设备:根据实际需求,将UART的发送线和接收线分别连接到外部设备的接收引脚和发送引脚。
二、软件编程实现单片机指令的串口通信需要编写相应的软件程序。
下面是基于C语言的软件编程实现方法:1. 初始化串口:在程序开始时,需要对串口进行初始化设置。
通过设置寄存器来配置波特率、数据位、停止位等参数。
2. 发送数据:使用发送指令将待发送的数据写入UART的数据寄存器,等待数据传输完成。
3. 接收数据:通过接收指令读取UART接收到的数据,并进行相应的处理。
可以使用中断或轮询方式进行数据接收。
4. 错误处理:在数据传输过程中,可能会出现错误,例如帧错误、奇偶校验错误等。
需要进行相应的错误处理操作,例如重新发送数据或发出错误提示。
5. 通信协议:根据通信需求,可以制定相应的通信协议。
通信协议包括数据帧结构、数据格式、数据校验等内容,用于确保数据的可靠传输。
三、实例演示下面通过一个简单的示例来演示单片机指令的串口通信实现方法。
假设我们需要实现从单片机向PC机发送一条消息,并接收PC机返回的确认信息。
串行通信工作方式

在RI=0的条件下,用指令置REN=1即可开始串行接收。TXD端输出移位脉冲,数据依次 由低到高以fosc/12波特率经RXD端接收到SBUF中,一帧数据接收完成后硬件置接收中断标 志位RI为1。若要再次接收一帧数据,应该用指令MOV A,SBUF将上一帧数据取走,并用指 令将RI清零。用方式0通信时,多用查询方式。
1.2 串行工作方式1
方式1是一帧10位的异步串行通信方式,包括1个起始位,8个数据 位和一个停止位。波特率可变,由定时器/计数器T1的溢出率和SMOD (PCON.7)决定。其帧格式如下:
起始 D0 D1 D2 D3 D4 D5 D6 D7 停止
1、 数据发送
发送时只要将数据写入SBUF,在串行口由硬件自动加入起始位和停 止位,构成一个完整的帧格式。然后在移位脉冲的作用下,由TXD端串 行输出。一帧数据发送完毕后硬件自动置TI=1。再次发送数据前,用指 令将TI清零。
单片机原理与应用
串行通信工作方式
80C51串行通信共有4种工作方式,由串行控制寄存器SCON 中SM0 SM1决定。
1.1 串行工作方式0(同步移位寄存器工作方式)
以RXD(P3.0)端作为数据移位的输入/输出端, 以TXD(P3.1)端输出移位脉冲。 移位数据的发送和接收以8位为一帧,不设起始位和停止位,无论输入 /输出,均低位在前高位在后。 其帧格式为:
1.3 串行工作方式2
串行接口工作方式2为9位异步通信接口,传送一帧数据有11位。1位起 始位(低电平信号),8位数据位(先低位后高位),1位可编程位,1位停止位 (高电平信号)。其格式如下:
起始位
数据位
0
D0
D1
D2
D3
D4
D5 D6
串行口工作方式0及应用举例

while
/7循环显示A9 U个数字
53UF=tahle :i] ; /7发送显示数字 while ( !TI) ; 77等待发自结束 TI=。; _ 〃为亙示下一个数字做准备
1= (i-L)h-Q;/7丄=【心 delay iu.s (1000}
三■方式0的应用举例
串口方式0
(同步移位寄存器方式)
id delay iu.s (uint *}
uchar t; while(#__} for(t=0;t<120;t+4};
i d niaim ( )
uchax 1; u5CnOsiNg=nQexdOaat;iar table |[ ] = {OxCO f OxF9 f 0xA4f OxBOf 0x99f 0x92f 0x32f 0xF3f 0x80f 0x90};
▼
S
C
O
〃发送一个字节的程序段
N = 0
(2
SBUF=DATA; 〃发送数据 DATA
while (!TI); // TI=0-发送进行中;TI = 1 -发送完 成;
)
TI=0; 〃为下次发送做准备
数
据
传
三■方式0的应用举例
#include <xeg51.h> #define uchar unsigned chax #define uint unsigned int
C
AT89C51
PO.O/ADO P0.1/AD1 P0.2/AD2 P0.3/AD3 P0.47AD4 P0.5/AD5 P0.6/AD6 P0.7/AD7
P2.0/A8 P2.1/A9 P2.2/A10 P2.3/A11 P2.4/A12 P2.5/A13 P2.6/A14 P2.7/A15
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单片机串口发送数据帧
很少看到有资料写如何以中断的方式发送一帧数据,如果以等待的发送数据帧,对高速运行的单片机来说是很浪费时间的,下面就介绍一种使用中断方式发送数据帧,操作平台采用51 mcu
首先定义一个数据帧的结构体,该结构体可以做为一个全局变量,所有的发送都要经过这个结构体:
//结构体
struct {
char busy_falg;//忙标志,若在发送数据时置位1,即在开始发送置位1,发送结束置位0
int index;//索引,指向需要发送数组的位置
int length;//整个数据帧的长度
char *buf;//指向需要发送的数据帧,建议为全局变量,否则一旦开始发送,必须等到发送结束,即判断busy_falg 为0
} send_buf;
发送数据的函数,这里有个缺点,就是还是要使用while 来检测串口是否忙碌,不过这样比占用系统时间来发送要好的多了:
//发送一帧
void SendBuf(char *buf,int length)
{
while(busy_falg);//查询发送是否忙,否则循环等待
send_buf.length = length;
send_buf.index = 0;
send_buf.buf = buf;
send_buf.busy_falg = 1;
SBUF = send_buf.buf[0];//写入SBUF,开始发送,后面就自动进入中断发送
}
串口中断发送函数,注意设置空闲标志位,避免多任务时多个发送帧调用了同一个结构体:
void SerialInt() interrupt 4 //串口中断
{
if(RI == 1)//串口接收
{
RI = 0;
}
else if(TI == 1)//串口发送
{
TI = 0;
send_buf.index++;
if(send_buf.index == send_buf.length)
{
send_buf.busy_falg = 0;//发送结束
return;
}
SBUF = send_buf.buf[send_buf.index];//继续发送下一个}
}
串口中断发送就是这样简单,注意busy_falg和index的使用。
单片机, 串口。