单级旋转倒立摆系统之令狐文艳创作
高中物理实验要点整理之令狐文艳创作

高中物理实验复习要点整理令狐文艳一、验证性实验⑴验证力的平等四边形定则1:目的:验证平行四边形法则。
2.器材:方木板一个、白纸一张、弹簧秤两个、橡皮条一根、细绳套两个、三角板、刻度尺,图钉几个。
3.主要测量:a.用两个测力计拉细绳套使橡皮条伸长,绳的结点到达某点O。
结点O的位置。
记录两测力计的示数F1、F2。
两测力计所示拉力的方向。
b.用一个测力计重新将结点拉到O点。
记录:弹簧秤的拉力大小F及方向。
4.作图:刻度尺、三角板5.减小误差的方法:a.测力计使用前要校准零点。
b.方木板应水平放置。
c.弹簧伸长方向和所测拉力方向应一致,并与木板平行.d.两个分力和合力都应尽可能大些.e.拉橡皮条的细线要长些,标记两条细线方向的两点要尽可能远些.f.两个分力间的夹角不宜过大或过小,一般取600---1200为宜(2)验证动量守恒定律原理:两小球在水平方向发生正碰,水平方向合外力为零,动量守恒。
m1v1=m1v1/+m2v2/本实验在误差允许的范围内验证上式成立。
两小球碰撞后均作平抛运动,用水平射程间接表示小球平抛的初速度:OP-----m1以v1平抛时的水平射程OM----m1以v1’平抛时的水平射程O‘N-----m2以V2’平抛时的水平射程验证的表达式:m1OP=m1OM+m2O/N 2.实验仪器:斜槽、重锤、白纸、复写纸、米尺、入射小球、被碰小球、游标卡尺、刻度尺、圆规、天平。
3.实验条件:a.入射小球的质量m1大于被碰小球的质量m2(m1 >m2)b.入射球半径等于被碰球半径c.入射小球每次必须从斜槽上同一高度处由静止滑下。
d.斜槽未端的切线方向水平e.两球碰撞时,球心等高或在同一水平线上4.主要测量量:a.用天平测两球质量m1、m2b.用游标卡尺测两球的直径,并计算半径。
C.确定小球的落点位置时,应以每次实验的落点为参考,作一尽可能小的圆,将各次落点位置圈在里面,就把此圆的圆心定为实验测量数据时所对应的小球落点位置。
单级旋转倒立摆系统

《现代控制理论》课程综合设计单级旋转倒立摆系统1 引言单级旋转倒立摆系统一种广泛应用的物理模型,其物理模型如下:图示为单级旋转倒立摆系统原理图。
其中摆的长度1l =1m ,质量1m = ,横杆的长度2l =1 m ,质量2m =,重力加速度20.98/g m s =。
以在水平方向对横杆施加的力矩M 为输入,横杆相对参考系产生的角位移1θ为输出。
控制的目的是当横杆在水平方向上旋转时,将倒立摆保持在垂直位置上。
图1 单级旋转倒立摆系统模型单级旋转倒立摆可以在平行于纸面3600的范围内自由摆动。
倒立摆控制系统的目的是使倒立摆在外力的推动下,摆杆仍然保持竖直向上状态。
在横杆静止的状态下,由于受到重力的作用,倒立摆的稳定性在摆杆微小的扰动下,就会使倒立摆的平衡无法复位,这时必须使横杆在平行于纸面的方向通过位移产生相应的加速度。
作用力与物体位移对时间的二阶导数存在线性关系,故单级倒立摆系统是一个非线性系统。
本文综合设计以以在水平方向对横杆施加的力矩M 为输入,横杆相对参考系产生的角位移1θ为输出,建立状态空间模型,在原有系统上中综合带状态观测器状态反馈系统,从而实现当横杆在旋转运动时,将倒立摆保持在垂直位置上。
/2 模型建立本文将横杆和摆杆分别进行受力分析,定义以下物理量:本文将横杆和摆杆分别进行受力分析,定义以下物理量:M 为加在横杆上的力矩;1m 为摆杆质量;1l 为摆杆长度;1I 为摆杆的转动惯量;2m 为横杆的质量;2l 为横杆的长度;2I 为横杆的转动惯量;1θ为横杆在力矩作用下转动的角度;2θ为摆杆与垂直方向的夹角;N 和H 分别为摆杆与横杆之间相互作用力的水平和垂直方向的分量。
倒立摆模型受力分析如图2所示。
图2 倒立摆模型受力分析摆杆水平方向受力平衡方程:2111222(0sin )2l d N m l dt θθ=++(1θ2l —横杆的转动弧长即位移)~摆杆垂直方向受力平衡方程:2111122(cos )22l l d H m g m dt θ-=-摆杆转矩平衡方程:22111222sin cos 22d l l J H N dt θθθ=-横杆转矩平衡方程:21222d M Nl J dt θ-=N考虑到摆杆在设定点12,=0θθ附近做微小振动,对上式进行线性化,即22sin θθ≈,2cos 1θ≈ ,20θ≈,其中23ml J =,近似线性化得到,()212222222120.10.50.98010.50.5130130d N dt H d H N dt d M N dt θθθθθ⎧=+⎪⎪-=⎪⎪⎨=⋅-⋅⋅⎪⎪⎪-=⎪⎩!整理上式可得倒立摆的状态方程:21221114.71524110032M M θθθθθ••••••••⎧-+-⎪⎪⎨⎪+-=⎪⎩ 本文参数代入计算可得:12224.64211.05312.3799.474MMθθθθ••⎧=-+⎪⎨=-⎪⎩ 取状态变量如下:11213242x x x x x θθθθ•⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦112233440010000 4.642011.05300010012.37909.474x x x x M x x x x ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦故[]1211341000x x y x x θ⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎣⎦3 稳定性和能控性分析稳定性分析判断一个系统是否稳定,只需判断该系统传递函数的极点是否都在左半平面。
理论力学习题之令狐文艳创作

第一章静力学公理与受力分析(1)令狐文艳一.是非题1、加减平衡力系公理不但适用于刚体,还适用于变形体。
()2、作用于刚体上三个力的作用线汇交于一点,该刚体必处于平衡状态。
()3、刚体是真实物体的一种抽象化的力学模型,在自然界中并不存在。
()4、凡是受两个力作用的刚体都是二力构件。
()5、力是滑移矢量,力沿其作用线滑移不会改变对物体的作用效果。
()二.选择题1、在下述公理、法则、原理中,只适于刚体的有()①二力平衡公理②力的平行四边形法则③加减平衡力系公理④力的可传性原理⑤作用与反作用公理三.画出下列图中指定物体受力图。
未画重力的物体不计自重,所有接触处均为光滑接触。
整体受力图可在原图上画。
)a(球A)b(杆AB)c(杆AB、CD、整体)d(杆AB、CD、整体)e(杆AC、CB、整体)f(杆AC、CD、整体四.画出下列图中指定物体受力图。
未画重力的物体不计自重,所有接触处均为光滑接触。
多杆件的整体受力图可在原图上画。
)a(球A、球B、整体)b(杆BC、杆AC、整体第一章静力学公理与受力分析(2)一.画出下列图中指定物体受力图。
未画重力的物体不计自重,所有接触处均为光滑接触。
整体受力图可在原图上画。
)a(杆AB、BC、整体)b(杆AB、BC、轮E、整体)c(杆AB、CD、整体)d(杆BC带铰、杆AC、整体)e(杆CE、AH、整体)f(杆AD、杆DB、整体)g(杆AB带轮及较A、整体)h(杆AB、AC、AD、整体第二章平面汇交和力偶系一.是非题1、因为构成力偶的两个力满足F= -F’,所以力偶的合力等于零。
()2、用解析法求平面汇交力系的合力时,若选用不同的直角坐标系,则所求得的合力不同。
()3、力偶矩就是力偶。
( )二.电动机重P=500N ,放在水平梁AC 的中央,如图所示。
梁的A 端以铰链固定,另一端以撑杆BC 支持,撑杆与水平梁的交角为300。
忽略梁和撑杆的重量,求撑杆BC 的内力及铰支座A 的约束力。
培训师开场及互动游戏之令狐文艳创作

下面是50种鼓掌的方式:1、朋友,当别人身处困境时,请给他温暖的掌声;当别人表现非凡时,请给他喝彩的掌声,当自己收获成功时,请珍惜那阵阵掌声。
2、昨天已经过去,明天还未到来,我们要好好把握今天,为今天喝彩,为今天鼓掌,对吗?3、让我们用掌声来预祝明天的成功。
4、伸出你的金掌、银掌、锌掌,欢迎……登场。
5、要不要了解一下/想听吗?那就先来点掌声吧6、给这个伟大、精彩的信息掌声鼓励一下7、让我们用热烈的掌声来迎接今天下面的课程8、大胆鼓掌,我别人,也为自己;更为丰富多彩的人生和美好的生活。
9、父母把我们生下来,我们才有机会在这里相聚,为我们伟大的父母亲掌声鼓励一下。
10、把掌声送给会务组织的每一个人,感谢他们给哦我们一个这么好的学习机会11、把掌声送给前后左右的人,谢谢你们(即将)给我一个好的安静的学习环境12、在这里我们要感谢先烈,为国争光的人,有他们才有我们自豪的今天。
13、献给那些默默奉献的人,你们平凡但伟大,暗淡但灿烂。
14、我们要不要为这个理论的提出者掌声感谢一下?15、别人在娱乐,而我们在学习,为我们自己的选择掌声鼓励一下16、今天我们讲学习到很多好的方法、技巧,我自己即将有的进步掌声鼓励祝贺一下17、我可以,在座的各位你们都可以,觉得可以的给自己掌声鼓励一下。
可以超过我的再鼓励一下,超过我10倍的,给自己一流榜的自信热烈掌声鼓励一下。
18、猩猩在非常愉快的情况下会像人类一样,两只爪子使劲拍,而有时许多人鼓掌时却面无表情。
19、掌声即心声,相由心生。
20、生命中不缺美,而缺赞美的掌声,对吗?21、每个人都像渴望阳光、空气、水一样渴望别人的爱,也同样渴望掌声。
讲师也不列外22、有人说:没有掌声的演出时可怕的,谁受的了那死一般的寂静;没有掌声的人生是可悲的,谁愿意在压抑种生存。
对吗?23、这段时间讲课比较多,嗓子也有点问题,不知道今天能否坚持讲完,不过据说掌声是可以产生奇迹的。
24、今天感冒了,不过据说掌声能够治疗感冒,让我讲的更好。
档案目录索引之令狐文艳创作
十
案卷目录号
1007
案卷号
内容
存放橱柜
1007-1
教学仪器、设备购置计划申请表
档案目录索引
全宗号
十
案卷目录号
1008
案卷号
内容
存放橱柜
1008-1
教学仪器验收单
档案目录索引
全宗号
十
案卷目录号
1009
案卷号
内容
存放橱柜
1009-1
教学仪器借用登记表
档案目录索引
全宗号
十
案卷目录号
1010
案卷号
内容
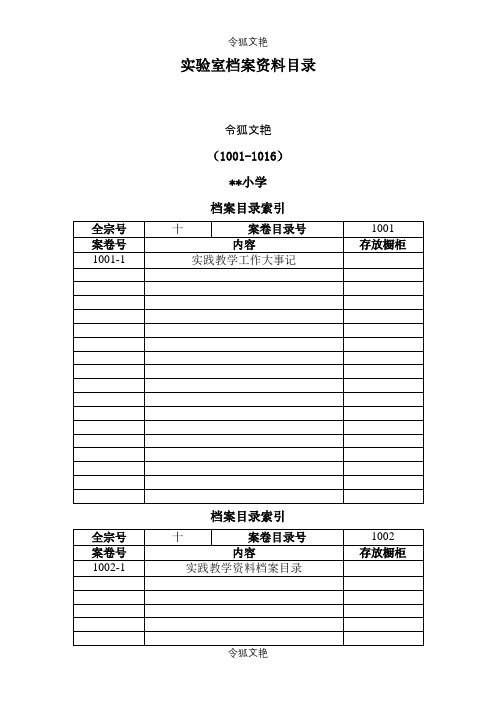
实验室档案资料目录
令狐文艳
(1001-1016)
**小学
档案目录索引
全宗号
十
案卷目录号
1001
案卷号
内容
存放橱柜
1001-1
实践教学工作大事记
档案目录索引
全宗号
十
案卷目录号
1002
案卷号
内容
存放橱柜
1002-1
实践教学资料档案目录
档案目录索引
全宗号
十
案卷目录号
1003
案卷号
内容
存放橱柜
1003-1
教学仪器设备说明书索引
1013-1
自制教具及第二课堂活动
档案目录索引
全宗号
十
案卷目录号
1014
案卷号
内容
存放橱柜
1014-1
荣誉登记
档案目录索引
全宗号
十
案卷目录号
1015
案卷号
内容
存放橱柜
1015-1
学生实验报告
档案目录索引
全宗号
动点问题题型方法归纳之令狐文艳创作

动点问题题型方法归纳令狐文艳动态几何特点----问题背景是特殊图形,考查问题也是特殊图形,所以要把握好一般与特殊的关系;分析过程中,特别要关注图形的特性(特殊角、特殊图形的性质、图形的特殊位置。
)动点问题一直是中考热点,近几年考查探究运动中的特殊性:等腰三角形、直角三角形、相似三角形、平行四边形、梯形、特殊角或其三角函数、线段或面积的最值。
下面就此问题的常见题型作简单介绍,解题方法、关键给以点拨。
一、三角形边上动点1、(2009年齐齐哈尔市)直线364y x =-+与坐标轴分别交于A B 、两点,动点P Q 、同时从O 点出发,同时到达A 点,运动停止.点Q 沿线段OA 运动,速度为每秒1个单位长度,点P 沿路线O →B →A 运动.(1)直接写出A B 、两点的坐标;(2)设点Q 的运动时间为t 秒,OPQ △的面积为S ,求出S 与t 之间的函数关系式;(3)当485S =时,求出点P 的坐标,并直接写出以点O P Q 、、为顶点的平行四边形的第四个顶点M 的坐标.图 B图 B 图 提2)问按点P 到拐点B 所有时间分段分类; 第(3)问是分类讨论:已知三定点O 、P 、Q ,探究第四点构成平行四边形时按已知线段身份不同分类-----①OP 为边、OQ 为边,②OP 为边、OQ 为对角线,③OP 为对角线、OQ 为边。
然后画出各类的图形,根据图形性质求顶点坐标。
2、(2009年衡阳市)如图,AB 是⊙O 的直径,弦BC=2cm ,∠ABC=60º.(1)求⊙O 的直径;(2)若D 是AB 延长线上一点,连结CD ,当BD 长为多少时,CD 与⊙O 相切;(3)若动点E 以2cm/s 的速度从A 点出发沿着AB 方向运动,同时动点F 以1cm/s 的速度从B 点出发沿BC 方向运动,设运动时间为)20)((<<t s t ,连结EF ,当t 为何值时,△BEF 为直角三角形.注意:第(3)问按直角位置分类讨论3、(2009重如图,已知抛物线(1)20)y a x a =-+≠经过点(2)A -,0,抛物线的顶点为D ,过O 作射线OM AD ∥.过顶点D 平行于x 轴的直线交射线OM 于点C ,B 在x 轴正半轴上,连结BC .(1)求该抛物线的解析式;(2)若动点P 从点O 出发,以每秒1个长度单位的速度沿射线OM 运动,设点P 运动的时间为()t s .问当t 为何值时,四边形DAOP 分别为平行四边形?直角梯形?等腰梯形?(3)若OC OB =,动点P 和动点Q 分别从点O 和点B 同时出发,分别以每秒1个长度单位和2个长度单位的速度沿OC 和BO 运动,当其中一个点停止运动时另一个点也随之停止运动.设它们的运动的时间为t ()s ,连接PQ ,当t 为何值时,四边形BCPQ 的面积最小?并求出最小值及此时PQ 的长.DAB=60° 当面积最大时,四边形BCPQ 的面积最小。
分镜头剧本范例之令狐文艳创作
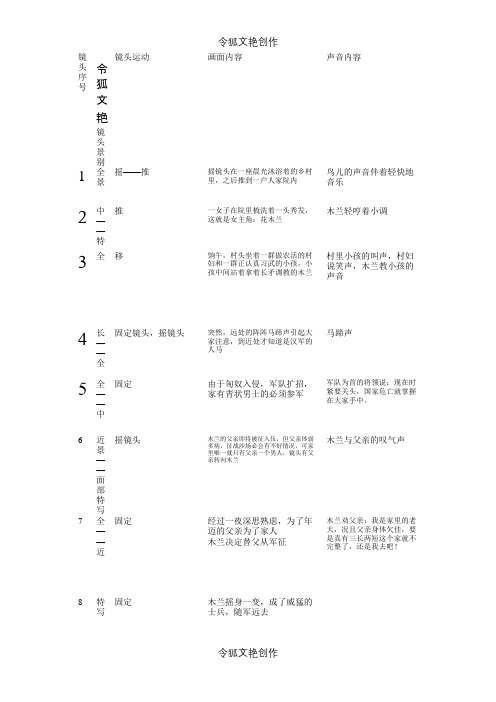
镜头序号令狐文艳镜头景别镜头运动画面内容声音内容1 全景摇——推摇镜头在一座晨光沐浴着的乡村里,之后推到一户人家院内鸟儿的声音伴着轻快地音乐2 中——特推一女子在院里梳洗着一头秀发,这就是女主角:花木兰木兰轻哼着小调3 全移饷午,村头坐着一群做农活的村妇和一群正认真习武的小孩,小孩中间站着拿着长矛调教的木兰村里小孩的叫声,村妇说笑声,木兰教小孩的声音4长——全固定镜头,摇镜头突然,远处的阵阵马蹄声引起大家注意,到近处才知道是汉军的人马马蹄声5全——中固定由于匈奴入侵,军队扩招,家有青状男士的必须参军军队为首的将领说:现在时紧要关头,国家危亡就掌握在大家手中。
6 近景——面部特写摇镜头木兰的父亲即将被征入伍,但父亲体弱多病,征战沙场必会有不好情况,可家里唯一就只有父亲一个男人,镜头有父亲转向木兰木兰与父亲的叹气声7 全——近固定经过一夜深思熟虑,为了年迈的父亲为了家人木兰决定替父从军征木兰劝父亲:我是家里的老大,况且父亲身体欠佳,要是真有三长两短这个家就不完整了,还是我去吧!8 特写固定木兰摇身一变,成了威猛的士兵,随军远去9 全拉,移战争一触即发,木兰总是跑在第一线,士气丝毫不亚于同军的男兵。
木兰英勇变现的镜头组接10 全固定镜头拍摄匈奴的军队,移镜头拍汉军的进攻,特写木兰用高炮打落的雪山顶,推镜头拍雪崩在最激烈的一次交战中木兰制造了雪崩一箭双雕击败了匈奴救了所剩无几的战士们11 全——中移——推由于木兰及大家的英勇善战,战争取得了阶段性胜利,百姓们列队欢迎战士的到来,百姓的呼喊声12 全——中——特跟——推——摇由于将军的疏忽匈奴首领占领了皇宫,准备除掉皇帝,镜头出现了木兰突袭匈奴将军,于官兵共同解救皇帝13 长——中——近跟——推木兰回到了故乡,得到了乡亲们的热烈欢迎,长镜头描写乡里街道的情景14 全——近跟——推待第二天木兰从家了出来,大家才发现木兰诗女郎。
一级倒立摆论文

直线倒立摆论文**: ***班级:13自动化一班学号:***********日期:2015.05.22摘要倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。
最初研究开始于二十世纪50 年代,麻省理工学院(MIT)的控制论专家根据火箭发射助推器原理设计出一级倒立摆实验设备。
近年来,新的控制方法不断出现,人们试图通过倒立摆这样一个典型的控制对象,检验新的控制方法是否有较强的处理多变量、非线性和绝对不稳定系统的能力,从而从中找出最优秀的控制方法。
倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展。
由于控制理论的广泛应用,由此系统研究产生的方法和技术将在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射中的垂直度控制、卫星飞行中的姿态控制和一般工业应用等方面具有广阔的利用开发前景。
平面倒立摆可以比较真实的模拟火箭的飞行控制和步行机器人的稳定控制等方面的研究。
第一章绪论1.1 引言杂技顶杆表演之所以为人们熟悉,不仅是其技术的精湛引人入胜,更重要的是其物理本质与控制系统的稳定性密切相关。
它深刻揭示了自然界一种基本规律,即一个自然不稳定的被控制对象,通过控制手段可使之具有良好的稳定性。
由此不难看出杂技演员顶杆表演的物理机制可简化为一个倒置的倒立摆装置,也就是人们常称的倒立摆或一级倒立摆系统。
早在上世纪60年代人们就开始了对倒立摆系统的研究。
倒立摆作为一个典型的不稳定、严重非线性的例证,用来检验控制方法对不稳定、非线性和快速性系统的控制能力。
而用不同的控制方法控制不同类型的倒立摆受到世界各国许多科学家的重视,成为目前具有挑战性的课题之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《现代控制理论》课程综合设计令狐文艳单级旋转倒立摆系统1 引言单级旋转倒立摆系统一种广泛应用的物理模型,其物理模型如下:图示为单级旋转倒立摆系统原理图。
其中摆的长度l=1m,质量1m=0.1kg ,横杆的长度2l =1 m,质量2m=0.1kg,1重力加速度2=。
以在水平方向对横杆施加的力矩M为g m s0.98/输入,横杆相对参考系产生的角位移θ为输出。
控制的目的是1当横杆在水平方向上旋转时,将倒立摆保持在垂直位置上。
图1 单级旋转倒立摆系统模型单级旋转倒立摆可以在平行于纸面3600的范围内自由摆动。
倒立摆控制系统的目的是使倒立摆在外力的推动下,摆杆仍然保持竖直向上状态。
在横杆静止的状态下,由于受到重力的作用,倒立摆的稳定性在摆杆微小的扰动下,就会使倒立摆的平衡无法复位,这时必须使横杆在平行于纸面的方向通过位移产生相应的加速度。
作用力与物体位移对时间的二阶导数存在线性关系,故单级倒立摆系统是一个非线性系统。
本文综合设计以以在水平方向对横杆施加的力矩M为输入,横杆相对参考系产生的角位移θ为输出,建立状态空间模1型,在原有系统上中综合带状态观测器状态反馈系统,从而实现当横杆在旋转运动时,将倒立摆保持在垂直位置上。
2 模型建立本文将横杆和摆杆分别进行受力分析,定义以下物理量:本文将横杆和摆杆分别进行受力分析,定义以下物理量:M为加在横杆上的力矩;m为摆杆质量;1l为摆杆长度;1I为摆杆1的转动惯量;m为横杆的质量;2l为横杆的长度;2I为横杆的2转动惯量;θ为横杆在力矩作用下转动的角度;2θ为摆杆与垂1直方向的夹角;N和H分别为摆杆与横杆之间相互作用力的水平和垂直方向的分量。
倒立摆模型受力分析如图2所示。
图2 倒立摆模型受力分析摆杆水平方向受力平衡方程:(1θ2l —横杆的转动弧长即位移)摆杆垂直方向受力平衡方程:摆杆转矩平衡方程:横杆转矩平衡方程:考虑到摆杆在设定点12,=0θθ附近做微小振动,对上式进行线性化,即22sin θθ≈,2cos 1θ≈ ,20θ≈,其中23ml J =,近似线性化得到,整理上式可得倒立摆的状态方程:本文参数代入计算可得:取状态变量如下:11213242x x x x x θθθθ•⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦112233440010000 4.642011.0530********.37909.474x x x x M x x x x ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦ 故 3 稳定性和能控性分析3.1 稳定性分析判断一个系统是否稳定,只需判断该系统传递函数的极点是否都在左半平面。
编写Matlab 语句可得该系统的传递函数,即A=[0,1,0,0;0,0,-4.642,0;0,0,0,1;0,0,12.379,0];B=[0;11.053;0;-9.474];C=[1,0,0,0];D=0;Gss=ss(A,B,C,D);G1=zpk(Gss)G1 =11.053 (s+2.898) (s-2.898)--------------------------s^2 (s-3.518) (s+3.518)Continuous-time zero/pole/gain model.从结果可以看出,传递函数存在一个在复平面右半侧的极点,故该系统是不稳定的。
3.2 能控性分析判断系统是否完全能控,只需判断该系统能控性矩阵是否为满秩,即若C rankQ n ,则该系统是完全能控的。
根据Matlab 语句中Qc=ctrb(A,B),即A=[0,1,0,0;0,0,-4.642,0;0,0,0,1;0,0,12.379,0];B=[0;11.053;0;-9.474];C=[1,0,0,0];Qc=ctrb(A,B);n1=rank(Qc)n1 =4从结果可以看出该系统是完全能控的,可以实现任意极点的配置。
3.3 能观测性分析与判断能控性类似,只需判断该系统能观测性矩阵是否为满秩,即若0rankQ n =,该系统是完全能观测的。
借用Matlab 语句中Qo=obsv(A,C),即A=[0,1,0,0;0,0,-4.642,0;0,0,0,1;0,0,12.379,0];B=[0;11.053;0;-9.474];C=[1,0,0,0];Qo=obsv(A,C);n2=rank(Qo)n2 =4从结果可以看出该系统是完全能观测的,故可以配置状态观测器4 状态反馈分析4.1 原系统Simulink 仿真及分析根据现代控制原理,绘制原系统的状态模拟图,如图3所示。
图运用MATLAB 中的Simulink 来对原系统进行仿真,首先可M-4.642 ⎰⎰y 4x 3x 2x以得出原系统的Simulink仿真模型如下图4所示图4 原系统Simulink仿真图通过Simulink仿真可以得到原系统的零状态响应,其中初始值2=0.174θ,M=0,响应曲线如下图所示图5 原系统2θ和M零状态响应曲线从仿真波形可以看出,在初始扰动情况下,摆杆不会稳定到垂直位置,横杆会一直运动,故原系统不稳定,这与上文所述传递函数有左半平面极点符合。
4.2状态反馈分析由于原系统是不稳定的,要使系统稳定,需要加入状态反馈,使系统的极点全部位于左半平面,状态反馈的结构图如图6所示。
图6 状态反馈系统的结构图控制系统的各种特性及其品质指标在很大程度上是由其闭环系统的零点和极点的位置决定。
极点配置问题就是通过对状态反馈矩阵的选择,使其闭环系统的极点配置在所希望的位置上,从而达到期望的性能指标的要求。
极点配置是一个非常复杂的问题,是一个工程实践与理论相结合的问题。
我们这里采用一种工程实践中经常用到的简便方法-主导极点法,其基本思路是先根据期望的性能指标和经验公式确定一对主导闭环极点,然后将另外的非主导极点放在复平面上远离主导极点的位置设倒立摆控制系统期望的性能指标为:阻尼系数ξ=0.6,调节时间ts=2s。
亦即控制系统在任意给定的初始条件下,能够以适当的阻尼ξ=0.6 (大约10%的超调),在2s 钟内将摆杆恢复到垂直平衡位置。
根据控制理论的经验公式得到无阻尼自然频率为:ωn =4/ (ts•ξ)=4/1.2=3.33P=wn•ξ由上述条件的很容易构建一个二阶系统,其两个极点为: p1 = -2.0000 +2 jp2 = -2.0000 -2 j它们就是需要的主导极点,控制系统的性能主要由这两个主导极点决定。
另外两个非主导极点(为简化取两个实数极点)经过反复试验整定,分别取距离两个主导极点 4 倍和 5倍的远处,即:p3 = -8.0000p4=-10.0000本文设计的状态反馈要求系统期望的特征值为:-10;-8;-2+j;-2-j 。
手算求解状态反馈阵K 有待定系数法和直接法,由于矩阵A 阶数较高,本文使用Matlab 中K=place(A,B,P1),求解K 。
A=[0,1,0,0;0,0,-4.642,0;0,0,0,1;0,0,12.379,0]; B=[0;11.053;0;-9.474];P1=[-10;-8;-2+2j;-2-2j];K=place(A,B,P1)K =-6.8931 -4.9957 -26.2369 -8.1525状态反馈[][]1234 6.8931 4.997526.23698.1525K k k k k ==----运用MATLAB 中的Simulink 来对原系统进行仿真,得到状态反馈模型仿真图如下图7所示。
图7 状态反馈Simulink 仿真图同理可得,初始值2=0.174θ,M=0的零状态响应,响应曲线如图8所示。
图8 状态反馈系统2θ和M 零状态响应曲线从响应曲线可以看出,在2=0.174θ,=0M 的初始扰动下,经过3s 左右的时间,摆杆回到垂直的位置,这说明加入状态反馈后可以使原系统达到稳定状态。
5 带状态观测器状态反馈系统分析5.1 状态观测器的设计由于在系统建模时状态变量并不是都是能直接测量,因此人为地构建一个系统来实现状态重构也即状态观测。
状态观测器的结构图如下,即图9 状态观测器的结构图观测器的状态方程为:显然选择观测器的系数矩阵A GC -的特征值均具有负复数,就可以使状态估计逐渐逼近状态的真实值。
本文设计全维状态观测器的特征值为:-10,-8,-2+2j ,-2-2j ,同理根据语句G=place(A ’,C ’,P2)可得5.2 带状态观测器状态反馈分析带观测器的状态反馈系统由3个部分组成,即原系统,观测器和状态反馈。
图10 综合后Simulink 仿真图初始值2=0.174θ,=0M 的零状态响应曲线如下图11 综合后零状态响应曲线从上面响应曲线可以看出,加入观测器后系统在3s 左右达到稳定,这是因为观测器后极点特征值的实部更加偏离原点,极点离远点越近,达到稳定的时间越短。
此外,综合后超调量略有增加。
综合后阶跃响应如图12所示。
图12 综合后阶跃响应曲线从响应曲线可以看出,加入阶跃M=1后,摆杆发生左右来回振荡,振荡幅度较大,最终摆杆处于垂直位置,横杆位于一个具体位置。
6 总结单倒立摆是一个非线性系统,通过近似线性变化,得到一个单输入单输出的线性定常系统。
选择一组状态变量11=x θ,2=x θ• ,32=x θ ,42=x θ,线性定常系统做稳定性,能控性和能观测性分析,得出原系统是不稳定,完全能控的,完全能观测的。
原系统在参考输入为零的情况下,系统状态在初始扰动的响应不能衰减至零,加入状态反馈后能够衰减至零。
利用状态观测器构成的状态反馈闭环系统零输入响应与直接进行状态反馈的闭环系统相比,暂态过程持续时间较长,这与极点的位置有关。
综合后的阶跃响应达到稳定时间较长,还有剧烈的震荡,这符合实际情况。
7 感想本次课程设计利用现代控制理论建立空间状态变量以及状态反馈的方法,实现单级旋转倒立摆的理论模型,在过程中遇到比较大的问题是关于任意极点配置,如何配置极点能使系统响应速度较快且振荡较小,经过思考和参考文献,选取主导极点法,设定阻尼系数ξ=0.6的一定的调节时间,得到一组主导极点,而另一组极点则利用4~5倍关系求出,最后顺利完成设计。
不足之处在于,响应的时间还是不够快,与实际情况有一定差异,课后我们小组会继续关注这个问题,寻求更好的办法实现。