金属塑性变形的力学基础共85页文档
金属塑性变形的物理基础
10 3 10 3 10 3 10 3 10 2
10 2 10 2
10
10 3
10 2
10 3 10 2
晶体的转动和滑移面的弯曲(宏观)
2、孪生
产生条件:只有在低温退火时
孪生区域
孪生方向
孪生面
孪生面
孪生方向
面心立方晶体孪生变形示意
a) 孪生面和孪生方向
3.25% 硅铁单晶抛光表面上的交滑移线
6位错塞积
2.4 多晶体的塑性变形
变形方式:滑移和孪生,基本与单晶体相同 (一个晶粒晶内变形) 变形特点 (晶间变形) 晶界(杂质、排列紊乱,晶界使多晶体的强度、 硬度比单晶体高) 位向 晶粒大小 变形不均匀 残余应力 此起彼伏地发生塑性变形, 相互滑动和转动
[uvw] is perpendicular to (uvw)
不同取向的单晶体、可以在不同拉伸力下开始滑移
P s A
P c cos cos A s cos cos
单晶体的屈服极限不是定值 cos cos 取向因子
原子是逐个移动 一些金属材料的实验屈服强度和理论屈服强度
2G 2a / b(1v ) e 1 v
v:波松比 a:滑移平面间的距 离 b:沿滑移方向原子 间的距离
一个位错移到晶体表面时, 便形成一个原子间距的滑 移量。同一滑移面上,有 大量的位错移到晶体表面 时,则形成一条滑移线。
临界剪切应力
晶体进入塑性时,在滑移面上,沿滑移方向的剪应力称为临界剪 应力 和晶体位向无关,决定于滑移面间原子的结合力
Miller 指数
z z intercept at b Miller Indices (hk) :
金属塑性成形原理金属塑性变形的物理基础PPT课件

• 较强相体积分数高于70%,该相变为基体相
第45页/共97页
弥散型两相合金的塑性变形
当第二相以细小弥散的微粒均匀分布于基体相
中时,将产生显著的硬化现象
•
沉淀强化(时效强化):第二相微粒是通过对过饱和固溶体的时效处理而沉淀析出并产生强化
•
相协调。
第39页/共97页
二、塑性成形的特点
❖
❖
❖
受晶界和晶粒位向的影响较大
多晶体塑性变形的抗力比单晶体高;
多晶体内晶粒越细,晶界总面积就越大,金属强度越高,塑性越好。
多晶体变形不均匀性
晶粒受位向和晶界的约束,变形先后不一致,导致变形不均匀。
由于变形不均匀,晶粒内部和晶粒之间存在不同的内应力,变形结束后不会
交滑移
• 对于螺型位错,所有包含位错线的晶面都可能成为滑移面。
• 交滑移:螺形位错的柏氏矢量具有一定的灵活性,当滑移受阻是,可离开原滑移
面而沿另一晶面继续移动
• 双交滑移:发生交滑移的位错,滑移再次受阻,而转到与第一次的滑移面平行的
的晶面继续滑移
• 刃型位错不可能产生交滑移
第31页/共97页
位错塞积
原子能量随位置的变化为一余弦函数。
❖ 通过计算晶体的临界剪切应力,并与实际的临界
剪切应力进行比较,人们发现,理论计算的剪切
强度比实验所得到的剪切强度要高一千倍以论
为了解释这种理论值和实际值的差别,1934年泰
勒()、奥罗万(E.Orowan)、和波兰伊
(M.Polanyi)几乎在同一时间内,分别提出了位
当退火状态的低碳钢试样拉伸到超过屈服点发生少量塑性变形
第2章金属塑性变形物理基础
协调性好、塑性高;而其发生滑移的条件需沿滑移面 施加一定大小的切应力。
第2章金属塑性变形物理基础
P λ
滑移方向 P
设拉力P引起的拉伸应力σ, 切应力分量为 φ τ=σcosφcosλ
滑移面
令u=cosφcosλ,称为取向因子 当u=0.5或接近0.5,称为软取向 当u=0或接近0,称为硬取向
第二章 金属塑性变形的物理基础
2.1 金属冷态下的塑性变形 2.2 金属热态下的塑性变形 2.3 金属的超塑性变形 2.4 金属在塑性加工过程中的塑性
行为
第2章金属塑性变形物理基础
§2.1金属冷态下的塑性变形
一、塑性变形机理 多晶体的塑性变形包括晶粒内部变形
(晶内变形)、晶外变形(晶间变形)。
(一)晶内变形 变形方式:滑移(主要)、孪生(次要)
金属多晶体中,各晶粒的位向不同, 使得塑性变形必然不可能在所有晶 粒内同时进行,构成多晶体塑性变 形不同于单晶体。
第2章金属塑性变形物理基础
2、孪生(形变孪晶)
晶体在切应力作用下,晶体的一部分沿着一定的 晶面(称为孪生面)和一定的晶向(称为孪生方向)
发生均匀切变。
金属在塑性变形时以何种方式变形,取决于哪种
第2章金属塑性变形物理基础
2)第二相粒子十分细小,并 弥散地分布在基体晶粒内, 称为弥散分布型两相合金
多相合金晶体中第二相粒子的分布情况不同,使塑 性变形的情况与单相合金的有所不同。
1)聚合型两相合金
由于两相尺寸分布在同一数量级上。因此,只有第 二相为较强相时,合金才能得到强化。
较强相所 占比例
<30%,变形滑移发生在较弱相 30%~70%,两相接近 >70%,第成2章金为属塑性基变形体物理基相础 ,塑性由其控制
金属塑性变形的力学基础
即应力分量与z轴无关,对z轴的偏 导数为零。
平面应力状态的应力张量
x xy 0
ij xy y 0
或
100
ij
0
2 0
0 0 0
000
主应力为:
12 x
y
2
x
y
2
2
2 xy
平面应力状态下的主切应力为:
121 22x 2y2x2y223121
的表现形式最为简洁。同样I1,I2,I3的形式也
可简化。不论坐标系怎样变化,一点的主应力 与应力张量不变量保持恒定。
应力椭球面
应力椭球面是在 l S1 ;m S2 ;n S3
主轴坐标系中点的 1
2
3
应力状态的几何表 达。
l2 m2 n2 1
有式(2-6a)
可得
S12 S22 S32 1
垂直的平面没有切应力; zxzy0
② 在z方向有阻止变形的正应力;z1 2(xy)m
③ 所有应力分量沿z轴均匀分布,即与z轴 无关,对z的偏导数为零。
平面应变状态下的应力张量为:
ij
xxy0 xyy0
000z
x0y2xyx02xyy0000m 0m0m
在主轴坐标系中应力张量
ij
100 020
0012
6. 应力球张量和应力偏张量
1. 应力张量的分解 塑性变形时体积变化为零,只有形状变
化。因此,可以把分解成与体积变化有 关的量和与形状有关的量。前者称应力 球张量,后者称应力偏张量。设为平均 应力,则有:
按照应力叠加原理, 具有可分解性。因此 有:
式中当
时,
;当
时,
第三章 金属塑性变形的物理基础
(1)塑性的基本概念
什么是塑性? 塑性是金属在外力作用下产生永久变形 而不破坏其完整性的能力。
塑性与柔软性的区别是什么? 塑性反映材料产生永久变形的能力。 柔软性反映材料抵抗变形的能力。
塑性与柔软性的对立统一
铅---------------塑性好,变形抗力小
不锈钢--------塑性好,但变形抗力高 白口铸铁----塑性差,变形抗力高
塑性指标的测量方法
拉伸试验法 压缩试验法 扭转试验法 轧制模拟试验法
拉伸试验法
Lh L0 100%
L0 F0 Fh 100%
F0
式中:L0——拉伸试样原始标距长度; Lh——拉伸试样破断后标距间的长度; F0——拉伸试样原始断面积; Fh——拉伸试样破断处的断面积
%
晶粒5 晶粒4 晶粒3
晶粒2
晶粒1
位置,mm
图5-6 多晶铝的几个晶粒各处的应变量。 垂直虚线是晶界,线上的数字为总变形量
四、合金的塑性变形
单相固溶体合金的变形 多相合金的变形
§3. 2 金属塑性加工中组织和性能变化 的基本规律
一、冷塑性变形时金属组织和性能的变化 二、热塑性变形时金属组织和性能的变化
2200
N/mm2
图4-6 正压力对摩擦系数的影响
0.5
μ
0.4
0.3
0.4
0.2 0.2
0.1
0
℃
200
400
600
800
图4-7 温度对钢的摩擦系数的影响
0
400
600
800 ℃
图4-8 温度对铜的摩擦系数的影响
测定摩擦系数的方法
夹钳轧制法 楔形件压缩法 塑性加工常用摩擦系数 圆环镦粗法
第二章 金属塑性变形的物理基础
26
锻造温度区间的制定
27
2、锻合内部缺陷 3、打碎并改善碳化物和非金属夹杂物在钢 中的分布 4、形成纤维组织 5、改善偏析
28
塑性变形过程中晶粒的变化
29
第三节 金属的超塑性变形
一、超塑性的概念和种类 概念:金属和合金具有的超常的均匀变形 能力。
大伸长率、无颈缩、低流动应力、易成形、无加工硬化
另一个取向,故晶界处原子排列处于过渡状态。
4、晶界不同于晶内性质:
3
一、变形机理
晶内变形 1、滑移 2、孪生 晶间变形 晶粒之间的相互转动和滑动 注意: 晶间变形的情况受温度的影响
4
1、滑移面和滑移方向的确定
确定滑移面:原子排 列密度最大的晶面 确定滑移方向:原子 排列密度最大的方向
5
金属的主要滑移方向、滑移面、滑移系
种类:
细晶超塑性:在一定的恒温下,在应变速率和晶粒度都满 足要求的条件下所呈现出的超塑性。 相变超塑性:具有相变或同素异构转变的金属,在其转变 温度附近以一定的频率反复加热、冷却。在外力的作用下 所呈现出的超塑性。
30
二、细晶超塑性变形的力学特征
无加工硬化
31
三、影响细晶超塑性的主要因素
应变速率
20
21
二、性能的变化 (力学性能) 加工硬化 成因:位错交互作用,难以运动 应用:强化(奥氏体钢) 避免:多次塑性加工中加入退火工序
22
第二节 金属热态下的塑性变形
热塑性变形:再结晶温度以上进行的塑性 变形 一、塑性变形时的软化过程 1、动态回复、动态再结晶 2、静态回复、静态再结晶、亚动钢中的碳和杂质元素的影响 碳 磷 硫 氮 氢 氧
37
2、合金元素对钢的塑性的影响 合金元素的加入,会使钢的塑性降低、变 形抗力提高 原因见课本p43
金属塑性变形的力学基础
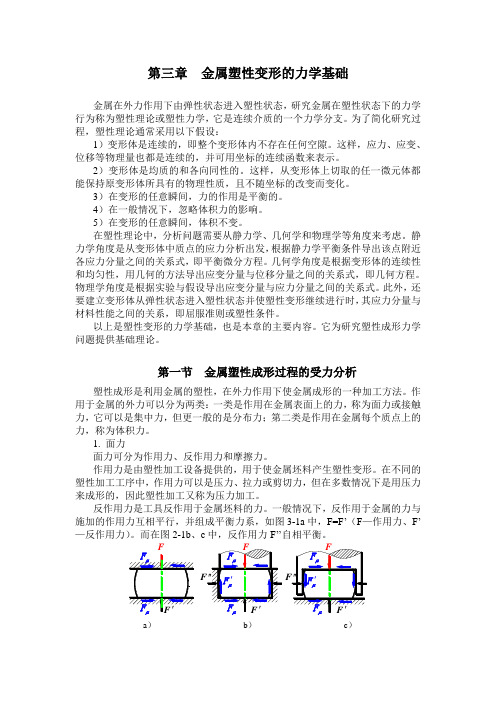
第三章金属塑性变形的力学基础金属在外力作用下由弹性状态进入塑性状态,研究金属在塑性状态下的力学行为称为塑性理论或塑性力学,它是连续介质的一个力学分支。
为了简化研究过程,塑性理论通常采用以下假设:1)变形体是连续的,即整个变形体内不存在任何空隙。
这样,应力、应变、位移等物理量也都是连续的,并可用坐标的连续函数来表示。
2)变形体是均质的和各向同性的。
这样,从变形体上切取的任一微元体都能保持原变形体所具有的物理性质,且不随坐标的改变而变化。
3)在变形的任意瞬间,力的作用是平衡的。
4)在一般情况下,忽略体积力的影响。
5)在变形的任意瞬间,体积不变。
在塑性理论中,分析问题需要从静力学、几何学和物理学等角度来考虑。
静力学角度是从变形体中质点的应力分析出发,根据静力学平衡条件导出该点附近各应力分量之间的关系式,即平衡微分方程。
几何学角度是根据变形体的连续性和均匀性,用几何的方法导出应变分量与位移分量之间的关系式,即几何方程。
物理学角度是根据实验与假设导出应变分量与应力分量之间的关系式。
此外,还要建立变形体从弹性状态进入塑性状态并使塑性变形继续进行时,其应力分量与材料性能之间的关系,即屈服准则或塑性条件。
以上是塑性变形的力学基础,也是本章的主要内容。
它为研究塑性成形力学问题提供基础理论。
第一节金属塑性成形过程的受力分析塑性成形是利用金属的塑性,在外力作用下使金属成形的一种加工方法。
作用于金属的外力可以分为两类:一类是作用在金属表面上的力,称为面力或接触力,它可以是集中力,但更一般的是分布力;第二类是作用在金属每个质点上的力,称为体积力。
1. 面力面力可分为作用力、反作用力和摩擦力。
作用力是由塑性加工设备提供的,用于使金属坯料产生塑性变形。
在不同的塑性加工工序中,作用力可以是压力、拉力或剪切力,但在多数情况下是用压力来成形的,因此塑性加工又称为压力加工。
反作用力是工具反作用于金属坯料的力。
一般情况下,反作用于金属的力与施加的作用力互相平行,并组成平衡力系,如图3-1a中,F=F’(F—作用力、F’—反作用力)。
金属塑性变形原理第三章金属塑性变形的力学基础
八、应力莫尔圆
ij
' ij
ij m
(i,j=x,y,z)
其中
m
1 3
(
x
y
z
)
即平均应力,
为柯氏符号。
即
x
.
xy y
xz yz
.x'
xy
' y
xz yz
m
1 0
0 1
0 0
.
. z .
.
' z
0 0 1
' x
x
m,
' y
y
m
' z
z
m
讨论:
分解的依据:静水压力实验证实,静水压力不会引起变形体 形状的改变,只会引起体积改变,即对塑性条件无影响。
' 1
(体现变形体形状改变的程度)
I
' 3
1'
2'
' 3
const
应力莫尔圆
应力莫尔圆是点应力状态的几何表示法,若已知某点的 一组应力分量或主应力,就可以利用应力莫尔圆通过图解法 来确定该点任意方位平面桑的正应力和切应力。这三个圆叫做 应力莫尔圆。
2
3
22
2
2
3
22
2 23
3
1
22
2
r
r
1 r
r
zr
z
1 r
(
r
)
0
r
r
1 r
zr
z
2 r
r
0
rz 1 z z rz 0 r r z r
➢ 球坐标下的应力平衡微分方程?
第二节 应变分析