第七版机械原理答案
机械原理第七版习题解答解答(第1-3章)

e'
b'
' n2
方向
t n aC 2 = aB + aC 2 B + aC 2 B = aC 3 + a k + ar C 2C 3 C 2C 3 2 2 大小 1 l AB 2 lBC ? 0 23vC 2C 3 ?
B A C B BC
49m / s2 , aC 2C3 23vC 2C3 0.7m / s2 C 2B
F 3n (2 p1 ph p) F 3 6 (2 7 3 0) 0 1
齿轮3,5和齿条7与齿轮5的啮合高副所提供的约束数 目不同,因为3,5处只有一个高副,而齿条7与齿轮5在齿 的两侧面均保持接触,故为两个高副。
3-1
何为速度瞬心?相对瞬心与绝对瞬心有何异同点?
解(1)取比例尺作机构运动简图如图所示:
(2) 自由度:F
3n (2 p1 ph ) 3 3 (2 4 0) 1
2-16 试计算图示各机构的自由度。图a、d为齿轮-连杆组 合机构;图b为凸轮-连杆组合机构(图中D处为铰接在一起 的两个滑块);图c为一精压机构。并问在图d所示机构中, 齿轮3、5和齿条7与齿轮5的啮合高副所提供的约束数目是 否相同,为什么? F D
2 、要除 去局 部 自由度 3 、 要 除 去 虚 约 束 2-11 图示为一简易冲床的初拟设计方案。设计者的思路 是:动力由齿轮1输入,使轴A连续回转;而固装在轴A上的 凸轮2与杠杆3组成的凸轮机构,将使冲头4上下运动以达到 冲压的目的。试绘出其机构运动简图,分析其是否能实现 设计意图,并提出修改方案。
F
D
F 3n (2 p1 ph p) F 3 4 (2 5 1 0) 0 1
机械原理(西工大第七版)习题册答案

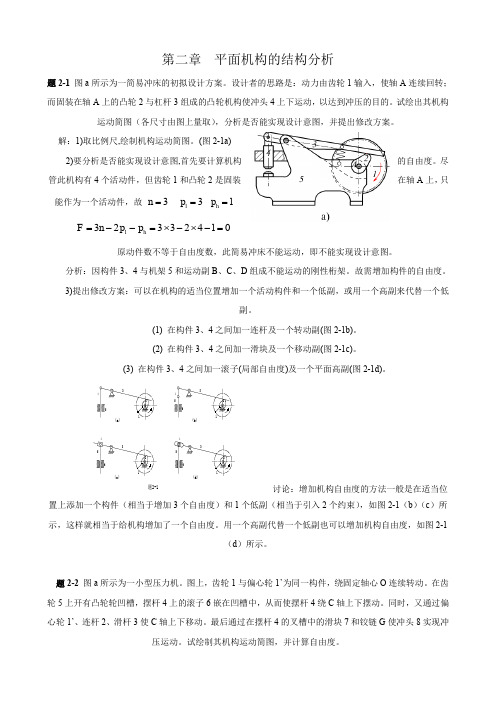
第二章平面机构的结构分析题2-1 图a所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-1a) 2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A上,只能作为一个活动件,故3=n3=lp1=hp原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5哥很爱你~~你懂得,哥很费解!!!和运动副B、C、D组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-1b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-1c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-1d)。
讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b)(c)所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d)所示。
题2-2 图a所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G使冲头8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
解:分析机构的组成:此机构由偏心轮1’(与齿轮1固结)、连杆2、滑杆3、摆杆4、齿轮5、滚子6、滑块7、冲头8和机架9组成。
机械原理第七版部分重要答案

2-16.试计算图示各机构的自由度。
图a 、d 为齿轮一连杆组合机构;图b 为凸轮一连杆组合机构(图中在 D 处为铰接在一起的两个滑块);图c 为一精压机机构。
并问在图 d 所示机构中,齿轮3、5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同?为什么?a) 分析:A 为复合铰链,不存在局部自由度和虚约束。
F=3n-(2p L +p H )=3 >4-(2 >5+1)=1或 F=3n-(2p L +p H -p')-F'=3 >- (2 >+1-0)-0=1 b) 分析:B 、E 为局部自由度。
F=3n-(2p L +p H )=3 >- (2 >+2)=1 或 F=3n-(2p L +p H -p')-F'=3 >-(2 >8+2-0)-2=1 注意:该机构在 D 处虽存在轨迹重合的问题,但由于D 处相铰接的双滑块为一个 n 级杆组,未引入约束,故机构不存在虚约束。
如果将相铰接的双滑块改为相固联的十字滑块,则 该机构就存在一个虚约束。
c) 分析:该机构存在重复结构部分,故存在虚约束。
实际上,从传递运动的独立性来看, 有机构ABCDE 就可以了,而其余部分为重复部分,则引入了虚约束。
F=3n- (2p L +p H )=3 >- (2 >+0)=1或 F=3n-(2p L +p H -p')-F'=3 >1-(2 >7+0-2)-0=1d) 分析:A 、B 、C 为复合铰链;D 处高副的数目为2。
不存在局部自由度和虚约束。
F=3n-(2p L +p H )=3 >- (2 >+3)=1 或 F=3n-(2p L +p H -p')-F'=3 >-(2 >+3-0)-0=1齿轮3与5的中心距受到约束, 轮齿两侧齿廓只有一侧接触, 另一侧存在间隙,故齿轮高副提供一个约束。
机械原理---课后习题答案第七版
(1)未刹车时 n=6,pl=8,ph=0,F=2
(2)刹紧一边时 n=5,pl=7,ph=0,F=1
(3)刹紧两边时 n=4,pl=6,ph=0,F=0
《机械原理》作业题解
第三章 平面机构的运动分析
题3-1 试求图示各机构在图示位置时全部瞬心。
a) P14→∞ P13→∞
B
P14→∞
4 3
P23
C D
4
3
2
v B 2 ( = v B1 ) → v B 3 → v C 3
1) 求vB2
B
1
B(B1, B2, B3)
ω1
b)
b2 (b1)
v B 2 = v B1 = ω1 l AB
2) 求vB3
p(d) (b3) (c3)
A
vB3 = vB 2 + vB3B 2
⊥BA ∥CD ?
方向: ⊥BD 大小: ?
C 2 p(d) 4 3 D B (c3)
aB3 = a
方向: 大小:
n B3D
+a
t B3D
= aB 2 + a
B→A
k B3B 2
+a
r B3B 2
B→D
√ a B1 ⎛ m / s 2 ⎞ 取 μa = ⎜ ⎟ 作加速度图 p ' b '1 ⎝ mm ⎠
√
⊥BD ?
0 0
∥CD ? b2 (b1) (b3) b'3
P13
题3-4解
2)当φ=165时,构件3的BC线上(或其延长线上)速度最小的 一点E的位置及其速度的大小
瞬心P13为构件3的绝对瞬心,构件3上各点在该位置的运动是绕P13的 转动,则距P13越近的点,速度越小,过作BC线的垂线P13 E⊥BC,垂 足E点即为所求的点。
《机械原理》第七版 郑文纬 吴克坚 著 课后习题答案 阳光大学生网高等教学出版社

E
I
n = 8,pl = 10,ph = 3
F = 3n − 2 pl − ph
= 3× 8 − 2 ×10 − 3
=1
机构具有确定运动的条件是:F=原动件数,即取 1 个原动件。
班级 姓名 学号
-4-
成绩 任课教师 批改日期
机械原理作业集
2—8 计算图示机构的自由度,并指出其中是否有复合铰链、局部自由度或虚约束。说明该机构 具有确定运动的条件。
机械原理作业集
2—11 计算图示机构的自由度,将其中的高副用低副代替,并分析机构所含的基本杆组,确定机
+
D
3
4 5+
E
解:
C
2 B
1
D 4
E
F 3
6
G 5
C 2 B
1
A
A
构的级别。
低代前:
低代后:
构件 2、3、4、6 为 III 级杆组,机构为 III 级机构。
2—12 计算图示机构的自由度,将其中的高副用低副代替,并分析机构所含的基本杆组,确定机
机械原理作业集
2—6 计算图示自动送料剪床机构的自由度,并指出其中是否有复合铰链、局部自由度或虚约束。
ED
DE = CF = HG
FC
I GH
J
解 1:C、F 为复合铰链,I 为局部自由度, EFGC 为虚约束。
B
n = 12,pl = 17,ph = 1,F ′ = 1,p′ = 1
A
F = 3n − 2 pl − ph − F ′ + p′
RRP II 级杆组 3
2
4
RRR II 级杆组
5
7 6 RRP II 级杆组
第七版《机械原理》-西北工业大学孙恒-配套习题册答案详解
题 2-8 图示为一刹车机构。刹车时,操作杆 1 向右拉,通过构件 2、3、4、5、6 使两闸瓦刹住车轮。试计 算机构的自由度,并就刹车过程说明此机构自由度的变化情况。(注:车轮不属于刹车机构中的构件。)
解:1)未刹车时,刹车机构的自由度
n 6 pl 8 ph 0
F 3n 2 pl ph 3 6 28 0 2
2) n 5 pl 7 ph 0
F 3n 2 pl ph 35 2 7 0 1
所设计的一种假肢膝关节机构,该机构能 为机架,
自由度,并作出大腿弯曲 90 度时的机构
简图。大腿弯曲 90 度时的机构运动简图
题 2-6 试计算如图所示各机构的自由度。图
a、d 为齿轮-连杆组合机构;图 b 为凸轮-连
销子与件 5 上的连杆曲线槽组成的销槽联接使活动台板实现收
放动作。在图示位置时,虽在活动台板上放有较重的重物,活
动台板也不会自动收起,必须沿箭头方向推动件 2,使铰链 B、D 重合时,活动台板才可收起(如图中双
点划线所示)。现已知机构尺寸 lAB=lAD=90mm,lBC=lCD=25mm,试绘制机构的运动简图,并计算其自由度。
p 2 pl ph 3n 2 17 3 310 3 4 局部自由度 F 4
F 3n (2 pl ph p) F 313 (217 4 4) 4 1
解法二:如图 2-7(b)
局部自由度 F 1 F 3n (2 pl ph p) F 3 3 (2 3 1 0) 1 1
压运动。试绘制其机构运动简图,并计算自由度。
解:分析机构的组成: 此机构由偏心轮 1’(与齿轮 1 固结)、连杆 2、滑杆 3、摆杆 4、齿轮 5、滚子 6、滑块 7、冲头 8 和机 架 9 组成。偏心轮 1’与机架 9、连杆 2 与滑杆 3、滑杆 3 与摆杆 4、摆杆 4 与滚子 6、齿轮 5 与机架 9、滑 块 7 与冲头 8 均组成转动副,滑杆 3 与机架 9、摆杆 4 与滑块 7、冲头 8 与机架 9 均组成移动副,齿轮 1
机械原理第七版西北工业大学课后习题答(1-8章)
机械原理作业集答案详解 第二章平面机构的结构分析题2-1 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-1a) 2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-1b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-1c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-1d)。
11(c)题2-1(d)54364(a)5325215436426(b)321讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-2 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
(新)机械原理第七版部分重要答案
2-16. 试计算图示各机构的自由度。
图a 、d 为齿轮—连杆组合机构;图b 为凸轮—连杆组合机构(图中在D 处为铰接在一起的两个滑块);图c 为一精压机机构。
并问在图d 所示机构中,齿轮3、5和齿条7与齿轮5解a) 分析:A 为复合铰链,不存在局部自由度和虚约束。
F=3n -(2p L +p H )=3×4-(2×5+1)=1或F=3n -(2p L +p H -p')-F'=3×4-(2×5+1-0)-0=1 b) 分析:B 、E 为局部自由度。
F=3n -(2p L +p H )=3×5-(2×6+2)=1或F=3n -(2p L +p H -p')-F'=3×7-(2×8+2-0)-2=1注意:该机构在D 处虽存在轨迹重合的问题,但由于D 处相铰接的双滑块为一个Ⅱ级杆组,未引入约束,故机构不存在虚约束。
如果将相铰接的双滑块改为相固联的十字滑块,则该机构就存在一个虚约束。
c) 分析:该机构存在重复结构部分,故存在虚约束。
实际上,从传递运动的独立性来看,有机构ABCDE 就可以了,而其余部分为重复部分,则引入了虚约束。
F=3n -(2p L +p H )=3×5-(2×7+0)=1或F=3n -(2p L +p H -p')-F'=3×11-(2×17+0-2)-0=1d) 分析:A 、B 、C 为复合铰链;D 处高副的数目为2。
不存在局部自由度和虚约束。
F=3n -(2p L +p H )=3×6-(2×7+3)=1或F=3n -(2p L +p H -p')-F'=3×6-(2×7+3-0)-0=1齿轮3与5的中心距受到约束,轮齿两侧齿廓只有一侧接触,另一侧存在间隙,故齿轮高副提供一个约束。
机械原理孙恒课后答案
机械原理孙恒课后答案【篇一:机械原理(第七版) 孙桓主编第7章】ss=txt>1.设某机器的等效转动惯量为常数,则该机器作匀速稳定运转的条件是,作变速稳定运转的条件是。
2.机器中安装飞轮的原因,一般是为了,同时还可获得的效果。
3.在机器的稳定运转时期,机器主轴的转速可有两种不同情况,即稳定运转,在前一种情况,机器主轴速度是,在后一种情况,机器主轴速度是。
4.机器中安装飞轮的目的是和。
7.机器等效动力学模型中的等效质量(转动惯量)是根据的原则进行转化的,因而它的数值除了与各构件本身的质量(转动惯量)有关外,还与。
8.机器等效动力学模型中的等效力(矩)是根据则进行转化的,等效质量(转动惯量)是根据的原则进行转化的。
9.机器等效动力模型中的等效力(矩)是根据的原则进行转化的,因而它的数值除了与原作用力(矩)的大小有关外,还与有关。
10.若机器处于起动(开车)阶段,则机器的功能关系应是,机器主轴转速的变化情况将是。
11.若机器处于停车阶段,则机器的功能关系应是,机器主轴转速的变化情况将是。
12.用飞轮进行调速时,若其它条件不变,则要求的速度不均匀系数越小,飞轮的转动惯量将越,在满足同样的速度不均匀系数条件下,为了减小飞轮的转动惯量,应将飞轮安装在轴上。
13.当机器运转时,由于负荷发生变化使机器原来的能量平衡关系遭到破坏,引起机器运转速度的变化,称为,为了重新达到稳定运转,需要采用来调节。
14.在机器稳定运转的一个运动循环中,运动构件的重力作功等于因为。
15.机器运转时的速度波动有速度波动两种,前者采用,后者采用进行调节。
16.若机器处于变速稳定运转时期,机器的功能特征应有,它的运动特征是。
17.当机器中仅包含机构时,等效动力学模型中的等效质量(转动惯量)是常量,若机器中包含机构时,等效质量(转动惯量)是机构位置的函数。
18.设作用于机器从动件上的外力(矩)为常量,且当机器中仅包含机构时,等效到主动件上的等效动力学模型中的等效力(矩)亦是常量,若机器中包含机构时,等效力(矩)将是机构位置的函数。
机械原理课后习题答案
pl = 7 ph = 0
F = 3n − 2 pl − ph = 3 × 5 − 2 × 7 − 0 = 1
题 2-6 试计算如图所示各机构的自由度。
题2- 5
图 a、d 为齿轮-连杆组 处 为 铰接 在一 起 的 两 个
合机构;图 b 为凸轮-连杆组合机构(图中在 D
滑块) ;图 c 为一精压机机构。并问在图 d 所示机构中,齿轮 3 与 5 和齿条 7 与齿轮 5 的啮 合高副所提供的约束数目是否相同?为什么? 解: a) n = 4
图2- 1 0
题 2-11 图 a 所示为一收放式折叠支架机构。该支架中的件 1 和 5 分别用木螺钉联接于固定 台板 1`和活动台板 5`上,两者在 D 处铰接,使活动台板能相对于固定台板转动。又通过件 1、2、3、4 组成的铰链四杆机构及连杆 3 上 E 点处销子与件 5 上的连杆曲线槽组成的销槽 联接使活动台板实现收放动作。在图示位置时,虽 在活动台板上放有较重的重物,活动台板也不会自
花花
机械原理(西北工业大学第七版)习题册解析
第二章 平面机构的结构分析
题 2-1 图 a 所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的凸轮机构使冲头 4 上下运动,以达 到冲压的目的。试绘出其机构运动简图(各尺寸由图上量取) ,分析是否能实现设计意图, 并提出修改方案。 解:1)取比例尺,绘制机构运动简图。(图 2-1a) 2)要分析是否能实现设计意图,首先要计算机构 的自由度。尽管此机构有 4 个活动件,但齿轮 1 和 凸轮 2 是固装在轴 A 上,只能作为一个活动件,故
pl = 7
ph = 3
6
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
v F = v E + v FE
b (c) (e)
p(a, d, g ) (f )
题3-8 b) 解
在图示各机构中,设已知各构件的尺寸,原动件以等角速度ω1顺时针方 向转动;试以图解法求机构在图示位置时构件3上C点的速度及加速度。 [解] l AB ⎛ m ⎞ μ = (1)取μι作机构运动简图; l ⎜ ⎟ AB ⎝ mm ⎠ (2)速度分析 取B为重合点:B(B1, B2, B3)
p' = 2p'l + p'h − 3n' = 2 × 3 + 0 − 3 × 2 = 0
p' = 2p'l + p'h − 3n' = 2 × 10 + 0 − 3 × 6 = 2
F = 3n − (2pl + ph − p') − F' = 3 × 11 − (2 × 17 + 0 − 2) − 0 =1
题3-4解
1)当φ=165时,点C的速度vC =?
v P 24 = ω2 ⋅ P12 P24 μl = ω4 ⋅ P14 P24 μl P12 P24 48.5 ⇒ ω4 = ω2 = 10 × = 4.47 (rad / s ) 108.5 P14 P24
取μι作机构运动简图;并求出各瞬心如图所示。 μl = 2 mm 利用瞬心P24
vB vE ω3 = = P13 B ⋅ μl P13 E ⋅ μl
P24
3 B
P23
2 A 1
4 D
P12
P14
P13 E P13 E 70.3 = ω2 l AB = 10 × 0.06 × = 0.36 (m / s ) vE = vB 118.5 P13 B P13 B
P13
题3-4解
3)当vC=0时, φ角之值(有两个解)?
n t k r aB3 = aB + a = a + a + a 3D B3D B2 B3B 2 B3B 2
题3-8 b) 解(续)
C
2
3
D
4
B
1
B(B1, B2, B3)
ω1
b)
b2 (b1) p'(d') (n'3)
A p(d) (b3) (c3)
方向: 大小:
B→D
√
k
⊥BD ?
B→A
√
0 0
m μ l = 0.002 mm
2 2 l BC = l AB + l AC − l AB ⋅ l AB ⋅ cos135
B C 3 2 D A 4 E 1
ω1 ϕ1
= 302 + 1002 − 30 × 100 × cos135 = 123 ( mm )
(2)速度分析 取C为重合点:C( C2, C3)
2) 求vC2
v C 2 = v B + v C 2 B = v C 3 + vC 2 C 3
4
P24
C
1
P34
2
A
P12
题3-1 试求图示各机构在图示位置时全部瞬心。
b) P13 P34
B
3
P
23 →
∞
2
P12
A
1
4
C P →∞ 14
P24
题3-1 试求图示各机构在图示位置时全部瞬心。
c) P13 P14 C
4
M
P23
B
3
→∞ P 34
vM
2
P24 P12
A
1
题3-2 在图示的齿轮-连杆组合机构中, 试用瞬心法求齿轮1和3的传动比ω1/ ω3 。
∥CD ?
其中 a B3B2 = 2ω2 v B3B2 = 0
a B1 ⎛ m / s 2 ⎞ 取 μa = ⎜ ⎟ 作加速度图 p ' b '1 ⎝ mm ⎠
3) 求aC3 : 用加速度影像法 aC 3 = μ a p ' c '3 = a B 2 = ω12 l AB
b'2 (b'1) k'
c'3
4
6
(2-3)
F = 3n − (2pl + ph ) = 3 × 3 − (2 × 4 + 0) = 1
1
F = 3n − (2pl + ph − p') − F' = 3 × 4 − (2 × 5 + 1 − 0) − 0 =1
F = 3n − (2pl + ph − p') − F' = 3 × 7 − (2 × 8 + 2 − 0) − 2 =1
C
E
vC = v B + vCB v D = v B + v DB
(2) 求vE
D p(a, f )
v E = vC + v EC = v D + v ED
b d e c
题3-5 解
b) 解: 顺序 (1) 求vC
v B → vC → v E → v F
D vB A B C E G F
vC = v B + vCB
欢迎光临阳光大学生网,提供最全面的大学生课后习题答案和复习试题免费下载,/
阳光大学生网
我们希望呵护您的眼睛,关注您的成长,给您一片绿色的环境,欢迎加入我们, 一起分享大学里的学习和生活感悟,免费提供:大学生课后答案,大学考试题及 答案,大学生励志书籍。
机械原理_第七版_课后答案_免费下载_西工大_孙恒_陈作模_葛文杰主编
P34
mm
vC = ω4 ⋅ lCD = 4.47 × 0.09 = 0.40 (m / s )
C 3
解法2: 利用瞬心P13 瞬心P13为构件 3的绝对瞬心
P24
B
P23
2 A 1
4 D
P12
P14
vB vC ω3 = = P13 B ⋅ μ l P13C ⋅ μl
vC = v B P13C P C 78.2 = ω2 l AB 13 = 10 × 0.06 × = 0.40 (m / s ) 118.5 P13 B P13 B
b'3
题3-8 c) 解
在图示各机构中,设已知各构件的尺寸,原动件以等角速度ω1顺时针方 向转动;试以图解法求机构在图示位置时构件3上C点的速度及加速度。 [解] l AB ⎛ m ⎞ = μ (1)取μι作机构运动简图; l ⎜ ⎟ AB ⎝ mm ⎠ (2)速度分析 ω1 A 1 取B为重合点:B(B1, B2, B3)
(1)未刹车时 n=6,pl=8,ph=0,F=2
(2)刹紧一边时 n=5,pl=7,ph=0,F=1
(3)刹紧两边时 n=4,pl=6,ph=0,F=0
《机械原理》作业题解
第三章 平面机构的运动分析
题3-1 试求图示各机构在图示位置时全部瞬心。
a) P14→∞ P13→∞ P23
B
3
P14→∞
b2 (b1) (b3)
方向: ⊥BD 大小: ?
取
√ v ⎛m/s⎞ μ v = B1 ⎜ ⎟ 作速度图 pb1 ⎝ mm ⎠
∴ vC 3
lCD lCD vB = = ⋅ l ABω1 l BC l BC
题3-8 c) 解(续1)
[解] (3)加速度分析
C
a B 2 ( = a B1 ) → a B 3 → a C 3
取
√ v ⎛m/s⎞ μ v = B1 ⎜ ⎟ 作速度图 pb1 ⎝ mm ⎠
3) 求vC3 : 用速度影像法
v C 3 = 0 同时可求得 ω3 =
vC 3 =0 lCD
[解] (1)取μι作机构运动简图; (2)速度分析 (3)加速度分析 a B 2 ( = a B1 ) → a B 3 → a C 3 1) 求aB2 n 2 方向:B→A a B 2 = a B1 = a B = ω 1A 1 l AB 2) 求aB3
P13
题3-4解
2)当φ=165时,构件3的BC线上(或其延长线上)速度最小的 一点E的位置及其速度的大小
瞬心P13为构件3的绝对瞬心,构件3上各点在该位置的运动是绕P13的 转动,则距P13越近的点,速度越小,过作BC线的垂线P13 E⊥BC,垂 足E点即为所求的点。
E
E点距C点距离为 μl ⋅ CE = 2 × 34.3 = 68.6 (mm ) C P34
P12 P24 当ω4=0时, vC=0,而 ω4 = ω2 P14 P24
vC = ω4 ⋅ lCD
当P24与P24 重合时
E
C
P12 P24 = 0 ⇒ ω4 = 0 ⇒ vC = 0
则必然是杆2和杆3 共线的位置,有两 共线位置:
P24
3 B
P34
P23
2
ϕ1
A 1
4
ϕ2
D
P12
P14
①重叠共线位置 ②拉直共线位置
ϕ1 = 227 ϕ2 = 26
P13
题3-5
• 在图示的各机构中,设已知各构件的尺寸及点B的速度,试作出 其在图示位置时的速度多边形。
C A vB D vB B E A B
D C E G F
F
a)
b)
题3-5 解
a) 解: 顺序 (1) 求vC和vD
v B → v C、 vD → vE
F A vB B
C 2 3 D B p(d) (c3) 4
v B 2 ( = v B1 ) → v B 3 → v C 3
1) 求vB2
v B 2 = v B1 = ω1 l AB