无刷直流电机双闭环控制
双闭环直流调速系统特性与原理

双闭环直流调速系统特性与原理双闭环直流调速系统是一种用于控制直流电动机转速的调速系统。
它由两个闭环控制回路组成,分别是转速外环和电流内环。
其中,转速外环控制直流电机的转速,通过调节电压来控制直流电机的转矩;而电流内环则控制直流电机的电流,通过调节电压来控制直流电机的转矩。
1.稳定性:双闭环控制系统能够有效地控制直流电动机的转速和电流,使其在运行过程中保持稳定的转矩输出。
通过转速外环对转速进行控制,可以实现精确的转速调节;而电流内环则能够控制电机的电流,防止过载和短路等故障。
2.响应速度:双闭环控制系统的转速外环具有较快的响应速度,能够实现快速的转速调节。
而电流内环的响应速度则相对较慢,主要起到电机保护的作用。
3.鲁棒性:双闭环控制系统具有较好的鲁棒性,能够对外部干扰和参数变化具有一定的抗干扰能力。
通过合理的控制策略和参数调整,可以提高系统的鲁棒性。
1.转速外环控制原理:转速外环将输出电压与给定的转速进行比较,得到转速误差,并通过调节电压反馈回内环控制器中。
转速外环控制器通常采用PI控制器,根据转速误差和积分项来控制输出电压。
通过不断调节输出电压,使得转速误差趋于零,从而实现对直流电机转速的调节。
2.电流内环控制原理:电流内环控制器将输出电压与给定的电流进行比较,得到电流误差,并通过调节输出电压来控制电流。
电流内环控制器通常也采用PI控制器,根据电流误差和积分项来控制输出电压。
通过不断调节输出电压,使得电流误差趋于零,从而实现对直流电机电流的调节。
3.反馈信号处理:双闭环直流调速系统中,转速和电流测量信号需要经过滤波和放大等处理,以便传递给控制器进行计算。
滤波器通常采用低通滤波器,用于去除高频噪声,放大器则用于放大信号强度。
4.控制指令处理:由上位机或人机界面输入的控制指令需要经过处理,包括限幅、线性化等,以确保输入信号符合控制系统的要求。
处理后的指令将送入控制器,进行计算和控制输出电压。
通过双闭环直流调速系统的控制,可以实现对直流电机的转速和电流的精确调节,并具有较好的稳定性、响应速度和鲁棒性,广泛应用于工业自动化领域。
无刷直流电机双闭环控制之欧阳德创编
江苏科技大学15届毕业设计(论文)无刷直流电机的双闭环控制设计系部:自动化专业名称:电气工程及其自动化班级:11403041学号:1140602116作者: 龚昊指导教师: 王伟然年月日无刷直流电机的双闭环控制设计The design of double closed loop control of the brushlessDC motor江苏科技大学毕业设计(论文)任务书学院名称:电子信息学院专业:电气工程及其自动化学生姓名:龚昊学号:1140602116指导教师:王伟然职称:讲师摘要由于电子技术,计算机技术,传感器技术,电力电子技术,现代控制理论和新型永磁材料的发展,永磁无刷直流电动机及其控制技术已有突破性进展。
近20年来,永磁无刷直流电机因其结构简单,调速性能好,控制方法灵活多变,效率较高,起动转矩大,运行寿命长等优点,日趋广泛应用于航空航天,计算机,军事,汽车,工业和家用电器等领域。
本文针对无刷直流电动机选取双闭环控制技术进行调速。
首先,介绍了无刷直流电机的特点及其结构和原理;其次,建立了无刷直流电机的模型,进行数学分析;再次,采用双闭环PI调速,主要针对其PI控制器进行了相关设计与改进,消除无刷直流电机稳态时的静差;最后,基于MATLAB/SIMULINK平台,建立控制系统的仿真模型,对无刷直流电动机速度闭环控制系统进行仿真。
仿真结果显示该模型转矩响应较快,电流脉动较小,电机工作稳定可靠,具有良好的静动态特性。
无刷直流电机的双闭环控制采用电流滞环,结构简单、响应快速,具有一定理论与应用意义。
关键词:无刷直流电动机;双闭环控制;数学模型;MATLAB;AbstractSince the development of electronic technology, computer technology, sensor technology, power electronics technology, modern control theory and new permanent magnetic material.Permanent magnet brushless dc motor and its control technology has made a breakthrough.During the past 20 years,since its simple structure,good performance of speed adjustment,variable control methods,high efficiency ,large starting torque and long service life and so on.The brushless dc motor is now increasingly used in fields like aerospace,computer,military,cars,industry andhousehold appliance.This passage is based on the speed control of the brushless dc motor.Double closed-loop control technology isused for researching and analysising among numerous control methods.At first,it has introduced the research backgroundof the brushless dc motor.Next,based on the working principle of the brushless dc motor,the model of the brushless dc motor has been established to do mathematical analysis. After that,we take double closed loop speed regulation,and mainly design and improve PI regulator tomake the brushless dc motor astatic in steady state.At lastin order to make simulation of control system for brushlessdc motor speed closed-loop control system,we establish the simulation model of control system which based onMATLAB/SIMULINK platform.The result of simulation shows that the response oftorque is quick and the pulsation of current is small.Themotor can work reliable and has good static characteristic.We use current hysteresis band in thecontrol system since its simple structure and quick response,it is based on reliable theory and is meaningfulin application.Keywords:brushless direct current motor;double closed-loop control;mathematical models ;MATLAB;目录第一章绪论11.1无刷直流电动机11.1.1无刷直流电机的简介 (1)1.1.2 无刷直流电机的特点11.1.3 无刷直流电机在工业中的地位及应用21.1.3.1定速驱动机械21.1.3.2调速驱动机械31.1.3.3精密控制31.2无刷直流电机国内外研究现状41.3无刷直流电机的发展趋势41.3.1无刷直流电机的发展前景 (4)1.3.2控制策略的发展 (6)1.4 本课题的研究意义71.5 章节安排81.6本章小结8第二章无刷直流电机的工作原理及其数学模型错误!未定义书签。
无刷直流电机双闭环串级控制系统仿真研究
Vo .9 11
No24 .
电子 设 计 工 程
Elc r n c De i n En i e rn e to i sg g n e i g
21 0 1年 1 2月
De .2 1 c 01
无刷 直流电机 双闭环 串级控制 系统仿真研 究
吕伟 鹏
Ke r s Mal b; r s l s tr i lt n mo e ;d a ls d lo y wo d : t a b he sDC moo ;smu a i d l u l o e — p u o c o
现代 高 磁 能 积 和 高 矫 顽 力 永 磁 材 料 的 发 展 使 永 磁 电 机
一
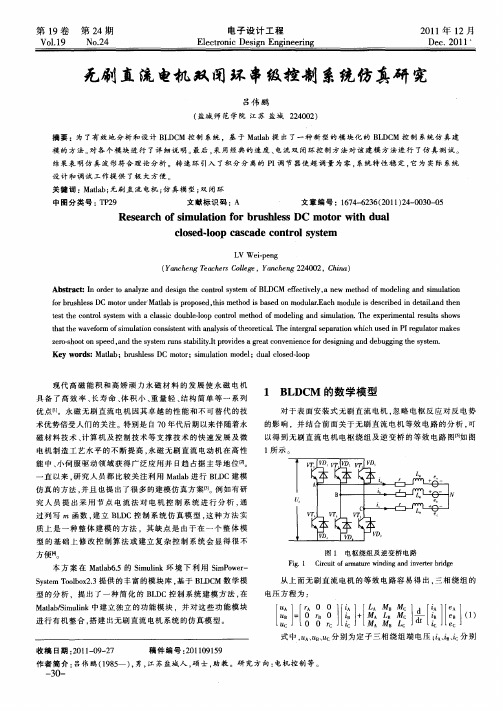
1 B D M 的数 学 模 型 L C
对 于表 面安 装 式 无 刷 直 流 电机 . 略 电枢 反 应 对 反 电势 忽 的影 响 ,并 结 合 前 面 关 于 无 刷 直 流 电机 等 效 电路 的 分 析 , 可 以得 到 无 刷 直 流 电 机 电 枢 绕 组 及 逆 变 桥 的等 效 电 路 图 如 图
t s t e c n r l y tm t ls i o b elo o to t o fmo ei g a d smu ai n T e e p r n a e u t s o e t h o to se wi a ca s d u l - p c n r l s h c o me h d o d l n i l t . h x ei n o me t rs l h ws l s
frb u h e sDC moo n e t b i p o o e t i to a e nmo u a . a h mo u ei d s r e eal n e o r s l s tru d r Mal r p s d, s a s h meh d i b s do d l r c d l e c i d i d t ia d t n s E s b n . h
无刷直流电机的双闭环控制系统研究的开题报告

无刷直流电机的双闭环控制系统研究的开题报告题目:无刷直流电机的双闭环控制系统研究一、选题背景和意义现代工业中,无刷直流电机已经广泛应用于机器人、自动化生产线、风能、水力发电等领域。
无刷直流电机具有体积小、重量轻、高效率、低噪音等优点,已成为当前最为主流的电机之一。
但是,无刷直流电机的特性随负载变化较大,且不能够直接控制转速,因此需要采用闭环控制系统来实现精确控制。
双闭环控制系统引入了位置环和速度环,可实现更精确和稳定的电机控制,因此在工业应用中被广泛采用。
二、研究内容和目标本文旨在研究无刷直流电机的双闭环控制系统,主要包括以下内容:1. 无刷直流电机的基本原理和特性,以及闭环控制系统的基本概念和原理。
2. 双闭环控制系统的设计和实现,包括位置环和速度环的设计和选型,以及PID控制器参数的调整和优化。
3. 基于MATLAB/Simulink的仿真实验,验证双闭环控制系统的性能和稳定性,包括转速响应、转速波动、位置误差等指标。
4. 测试实验,实现双闭环控制系统的实际应用,包括负载响应能力与实际应用环境的适应性等方面的测试和评估。
本研究旨在实现无刷直流电机的双闭环控制系统,提高电机的精度和稳定性,为其在工业应用中的广泛应用奠定基础。
三、研究方法和进度安排1. 研究方法本研究采用理论分析和仿真实验相结合的方法。
首先对无刷直流电机的基本原理和闭环控制系统的基本概念进行理论分析,然后设计双闭环控制系统,采用MATLAB/Simulink进行仿真实验,最后进行实际测试实验。
2. 进度安排第一阶段:文献调研和理论分析。
2019年10月-2019年11月。
第二阶段:设计双闭环控制系统。
2019年11月-2020年2月。
第三阶段:基于MATLAB/Simulink的仿真实验。
2020年2月-2020年4月。
第四阶段:测试实验和性能评估。
2020年4月-2020年6月。
第五阶段:撰写毕业论文。
2020年6月-2020年7月。
无刷直流电动机双闭环控制系统研究

;
.
无 刷 直 流 电 动 机 双 闭环 控 制 系 统 研 究
刘 文 勇 , 明耀 林
( 东南大学 , 江苏南京 20 9 ) 10 6 摘 要: 为实现无刷直流 电动机转 速转 矩高精度 控制 , 设计 了以数字信号控 制器 ( S ) sI3 F 0 1为控制 核 D C dPC O 4 1
s h me o h y tm sdic s e lt r Ex ei ntlrs ls v rf h tt e ha d r n s fwae o h y tm r e — c e t e s se wa s u s d ae . p rme a e u t e y t a h r wa e a d o t r ft e s se a e r a f i
s nbea dta go p e d s n e om n ec n b c iv . o a l n t o d se d aj t g p r r a c a ea hee h u i f Ke r s bu hesD o r d PC O 4 1 ; o bec sd l pP o t l se d aj s n ywo d :rs l C m t ;s I 3 F 0 1 d u l l e — o I nr ; e d t g s o o o c o p u i
( otes U i r t, aj g2 0 9 , hn ) Suh at nv s y N ni 10 6 C ia ei n
Abs r t To a hiv ih-pr ii n s e n o qu o to fb u h e s DC tr s e d a u r ntd ube cos d tac : c e e h g ecso pe d a d tr e c nr lo r s l s moo , p e nd c re o l l e
新能源汽车永磁无刷直流电机制动能量回馈双闭环控制技术
新能源汽车永磁无刷直流电机制动能量回馈双闭环控制技术作者:杨小兵路高磊王发群来源:《山东工业技术》2015年第16期摘要:本文分析了新能源汽车永磁无刷直流电机制动能量回馈的双闭环控制方法,论述了永磁无刷电机能量回馈原理和双闭环控制原理,根据电机制动能量回馈原理提出一种实现制动可靠能量回馈控制方法,通过在电机控制器测试台架上进行了测试,达到了预期的控制效果。
关键词:新能源汽车;永磁无刷直流电机;能量回馈;双闭环控制1 前言随着新能源汽车控制技术的发展,对新能源汽车控制技术的要求越来越高,提高续航里程是其中的一个重要问题,而新能源汽车用电机能量回馈技术可以将汽车制动和减速时[1]的部分动能转化为电能回馈到蓄电池,从而提高电动汽车的续驶里程,但是,蓄电池容量都有一定的限制,制动能量回馈时将产生很高的泵升电压和电流,为了避免过高的泵升电压和电流对系统带来危害,文中提出了通过控制占空比的办法来抑制泵升电压[2]和电流,提出了一种电压和电流双闭环数字控制方案,实现对泵升电压和电流的抑制,该方法通过数字控制实现,无需改动或增加硬件[3],该方法可迅速抑制泵升电压和电流,实现可靠的能量回馈控制,且具有良好的制动效果。
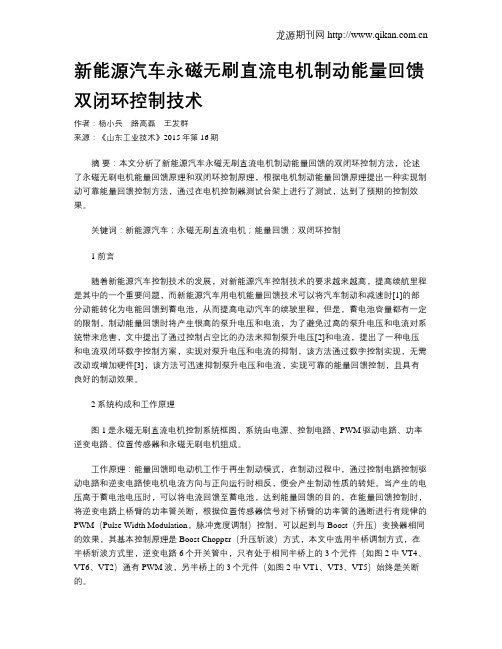
2 系统构成和工作原理图1是永磁无刷直流电机控制系统框图,系统由电源、控制电路、PWM驱动电路、功率逆变电路、位置传感器和永磁无刷电机组成。
工作原理:能量回馈即电动机工作于再生制动模式,在制动过程中,通过控制电路控制驱动电路和逆变电路使电机电流方向与正向运行时相反,便会产生制动性质的转矩。
当产生的电压高于蓄电池电压时,可以将电流回馈至蓄电池,达到能量回馈的目的,在能量回馈控制时,将逆变电路上桥臂的功率管关断,根据位置传感器信号对下桥臂的功率管的通断进行有规律的PWM(Pulse Width Modulation,脉冲宽度调制)控制,可以起到与Boost(升压)变换器相同的效果,其基本控制原理是Boost Chopper(升压斩波)方式,本文中选用半桥调制方式,在半桥斩波方式里,逆变电路6个开关管中,只有处于相同半桥上的3个元件(如图2中VT4、VT6、VT2)通有PWM波,另半桥上的3个元件(如图2中VT1、VT3、VT5)始终是关断的。
无刷直流方波电动机的双闭环控制

无刷直流方波电动机的双闭环控制永磁无刷直流电动机在机械和电力系统方面是一种很引人注目的电动机。
这种机器结构的简单和它的控制特性类似于交流电机,它在商业,军事等其他领域的应用里是非常受欢迎的选择。
在普遍的无刷直流电动机的计划里,时间和空间的分布是按照磁力线的密度来考虑的,但是驱动环节的曲线是相差120度的。
巨大而细微的转矩是度量无刷电动机效率和低速执行的重要准则,它的直接效果就是在大转矩和细微转矩之间造成一种干扰。
一种引人注目的电动机的配置被人认为是方波电动机。
方波电动机来自于它的方波控制,主要在它的方波时空的磁通干扰中产生控制指令。
因此方波永磁电动机有很让人羡慕的前景,特别在机器人和商业服务中得到广泛重视。
这都是在方波永磁电动机产生的时候所不曾想过的。
2. 方波永磁电动机驱动系统方波永磁电动机驱动系统由三个部分组成:转换器,逻辑控制环节(包括速度调节器,时间调节器,和能量逻辑转换控制单元),详述如下下面是硬件执行器和操作的细节2.1 方波永磁电动机带有双结构方波永磁电动机是由六个小结构组成的。
电机额定电流和机械数据是:200v额定电压,18A的额定电流,3.0k的额定功率,1500转每秒的额定转速,0.0388千克没平方厘米。
2.2 IGBT 变换器一个变换器对频率/电压的三个阶段的组成适应IGBT 变换器的选择是非常重要的,其结果是他们中和了各种高介的性能。
变换器被六个IGBT支配着,没个包括60A的IGBT和一个反馈信号。
2.3 能量转换控制逻辑位置反馈信号被用于同时发生的相位变化的检测。
为了这样做,三个位置反馈信号,来源于PT,他们是在PSP环节被加工的,他们也受六个控制逻辑信号的控制来开/关IGBT、在IGBT变换器里。
在BLDCM的控制分布里有两个IGBT 工作在PWM的模式里,并且两个IGBT应该依靠于这样的逻辑控制信号。
虽然直流能量的频率被变换器的供给,依据这样的关系为IGBT提供信号的PWM信号是来源于三角波和触发控制信号Ui越大,U也就越大,所以BLDCM的速度也就越大。
无刷直流电机(BLDC)双闭环调速解析

根据模拟 PID 可以得到数字 PID 的控制算法,为了用计算机实现 PID 控制规律,当采样时间 Ts 很小时,可以通过离散化来得到公式。在数字化 PID 中,用 Ki(积分系数)来代替 Ti(积 分时间),用 Kd(微分系数)来代替 Td(微分时间)。其中 Ki=(Kp*Ts)/Ti;Kd=(Kp*Td)/Ts。 1、数字化位置式 PID 标准形式:Pu(t)=Kp*e(t)+Ki*∑e(t)+Kd*(e(t)-e(t-1))]+Pu(t-1) 将 Kp 分离出来:Pu(t)=Kp*[e(t)+(Ts/Ti)*∑e(t)+(Td/Ts)*(e(t)-e(t-1))]+Pu(t-1) 用 C 代码表式公式:用 ek 代表 e(t);用 ek1 代表 e(t-1);用 Pu1 代表 Pu(t-1) Pu=Kp*[ek+(Ts/Ti)*∑ek+(Td/Ts)*(ek-ek1)]+Pu1 2、数字化增量式 PID(同模拟量一样跟据两式相减得到增量式) Pu(t)=Kp*[(e(t)-e(t-1))+(Ts/Ti)*e(t)+(Td/Ts)*(e(t)-2*e(t-1)+e(t-2))] 用 C 代码表式公式:用 ek 代表 e(t);用 ek1 代表 e(t-1);用 ek2 代表 e(t-2) Pu=Kp*[(ek-ek1)+(Ts/Ti)*ek+(Td/Ts)*(ek-2*ek1+ek2)] 在上式中,Pu 是输出量,Pu1 是前一次的输出量,Kp 是比例系数,Ti 是积分时间,Td 是微 分时间,Ts 是采样周期,ek 是当次的误差,ek1 是前一次的误差,ek2 是前两次的误差。而 在实际的应用中,为了简化程序,一般不将 Ts 拿来做运算,因为积分项和微分项的常数都 是两个比值,分别直接用系数 Ki 和 Kd 来代替,只是当采样周期改变时,要去相应的调整几 个系数的大小,所以我们可以得到无刷直流电机的增量式 PID 算法公式: Pu=Kp*[(ek-ek1)+Ki*ek+Kd*(ek-2*ek1+ek2)] 但是上面的公式在无刷直流电机的 PID 控制中并不实用,因为在电机的启动、停止或大幅增 减设定值时,由于会出现很大的偏差,且有时此偏差会保持一段时间不变(如电机启动时需 要一定的时间才能转动起来),会造成 PID 算法的比例控制失调,积分严重饱和的现象,此 现象表现为电机需要较长的时间才能运转起来,运转起来之后又会出现较大的超调。因此要 将其做改进的 PID 控制的形式,同时要在程序中加抗积分饱和的判断处理。 改进的 PID 公式:Pu=Kp[ek+Ki*∑ek+Kd*(ek-ek1)] 上式中,如果去掉微分项,只用 PI 控制,则公式:Pu=Kp[ek+Ki*∑ek] 将∑ek 分解出来用误差累加 ei 表示,则公式:Pu=Kp*ek+Ki*Kp*ek+ei;ei=Ki*Kp*ek+ei 加变速积分,则公式:Pu=Kp[ek+fek*Ki*∑ek+Kd*(ek-ek1)] 上式中,fek 为变速积分系数,如果去掉微分项,只用 PI 控制,将∑ek 分解出来用误差累 加 ei 表示,则公式:Pu=Kp*ek+fek*Ki*Kp*ek+ei;fek=0-1(由 A 和 B 值来确定) 当误差 ek 大于 A+B 时:fek=0(积分不起作用) 当误差 ek 在 B 与 A+B 之间时:fek=>0&<1(积分随误差减小而增强,随误差增大而减弱) 当误差 ek 大于 A+B 时:fek=1(全速积分)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
某科技大学
15届毕业设计(论文)
无刷直流电机的双闭环控制设计
系部:自动化
专业名称:电气工程及其自动化
班级:11403041
学号:1140602116
作者: 龚昊
指导教师: 王伟然
年月日
无刷直流电机的双闭环控制设计
The design of double closed loop control of the brushless DC
motor
某科技大学
毕业设计(论文)任务书
学院名称:电子信息学院专业:电气工程及其自动化
学生某:龚昊学号:1140602116
指导教师:王伟然职称:讲师
摘要
由于电子技术,计算机技术,传感器技术,电力电子技术,现代控制理论和新型永磁材料的发展,永磁无刷直流电动机及其控制技术已有突破性进展。
近20年来,永磁无刷直流电机因其结构简单,调速性能好,控制方法灵活多变,效率较高,起动转矩大,运行寿命长等优点,日趋广泛应用于航空航天,计算机,军事,汽车,工业和家用电器等领域。
本文针对无刷直流电动机选取双闭环控制技术进行调速。
首先,介绍了无刷直流电机的特点及其结构和原理;其次,建立了无刷直流电机的模型,进行数学分析;再次,采用双闭环PI调速,主要针对其PI控制器进行了相关设计与改进,消除无刷直流电机稳态时的静差;最后,基于MATLAB/SIMULINK平台,建立控制系统的仿真模型,对无刷直流电动机速度闭环控制系统进行仿真。
仿真结果显示该模型转矩响应较快,电流脉动较小,电机工作稳定可靠,具有良好的静动态特性。
无刷直流电机的双闭环控制采用电流滞环,结构简单、响应快速,具有一定理论与应用意义。
关键词:无刷直流电动机;双闭环控制;数学模型;MATLAB;。