DS18B20温度读取及显示讲解学习
第31课温度传感器DS18B20详解

实验现象
通过对DS18B20的控制,读取出DS18B20所采集的温度数据并在 数码管的第4、5、6、7位进行显示,温度精确到小数点后一位。
显示方式为:020.5(温度为正)或-10.4(温度为负)。
DS18B20的命令
ROM操作命令
(1)读ROM--33H (2)匹配ROM--55H (3)跳过ROM--CC
功能命令
(1)写暂存寄存器命令--4EH (2)读暂存寄存器指令--BEH (3)复制暂存寄存器命令—48H (4)启动温度转换命令—44H (5)回传EEPROM内容指令--B8H (6)读电源类型指令--B4H
如何用DS18B20来采集温度
访问一个DS18B20必须经过初始化、ROM命令和功能命令这三个步骤 。 单个DS18B20发命令顺序 第一步: DS18B20初始化----跳过ROM命令(CCH)----启动温度转换命令(44H) 第二步: DS18B20初始化----跳过ROM命令(CCH)----读暂存寄存器指令(BEH)
DS18B20简介
DS18B20是DALLS公司推出的“1-WIRE”接口的 数字温度传感器,可以直接将温度转换为9~12位串行 数字信号供单片机处理。它具有体积小、功耗低、精度 高、抗干扰能力强等优点。
DS18B20引脚和封装
DS18B20的内部结构
DS18B20当分辨率为9,10,11,和12位时,分别对应与0.5℃, 0.25℃,0.125℃,0.0625℃的温度增量
DS18B20写数据时序图分析
①首先给DQ赋值低电平。 ②延时确定时间15us。 ③对DQ赋值,向DS18B20写入相应的高低 电平。 ④再延时时间为45us。 ⑤最后给DQ置高电平。
DS18B20读数据时序分析
(完整版)读取DS18B20温度传感器的64位ID号方法及程序
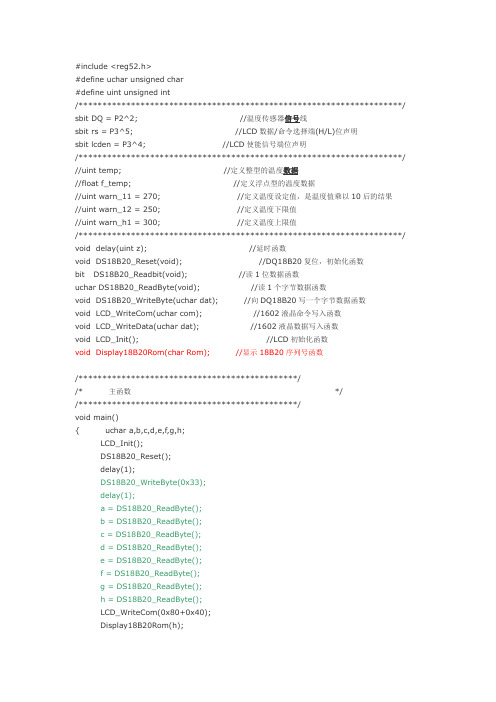
#include <reg52.h>#define uchar unsigned char#define uint unsigned int/********************************************************************/ sbit DQ = P2^2; //温度传感器信号线sbit rs = P3^5; //LCD数据/命令选择端(H/L)位声明sbit lcden = P3^4; //LCD使能信号端位声明/********************************************************************/ //uint temp; //定义整型的温度数据//float f_temp; //定义浮点型的温度数据//uint warn_11 = 270; //定义温度设定值,是温度值乘以10后的结果//uint warn_12 = 250; //定义温度下限值//uint warn_h1 = 300; //定义温度上限值/********************************************************************/ void delay(uint z); //延时函数void DS18B20_Reset(void); //DQ18B20复位,初始化函数bit DS18B20_Readbit(void); //读1位数据函数uchar DS18B20_ReadByte(void); //读1个字节数据函数void DS18B20_WriteByte(uchar dat); //向DQ18B20写一个字节数据函数void LCD_WriteCom(uchar com); //1602液晶命令写入函数void LCD_WriteData(uchar dat); //1602液晶数据写入函数void LCD_Init(); //LCD初始化函数void Display18B20Rom(char Rom); //显示18B20序列号函数/**********************************************//* 主函数 *//**********************************************/void main(){ uchar a,b,c,d,e,f,g,h;LCD_Init();DS18B20_Reset();delay(1);DS18B20_WriteByte(0x33);delay(1);a = DS18B20_ReadByte();b = DS18B20_ReadByte();c = DS18B20_ReadByte();d = DS18B20_ReadByte();e = DS18B20_ReadByte();f = DS18B20_ReadByte();g = DS18B20_ReadByte();h = DS18B20_ReadByte();LCD_WriteCom(0x80+0x40);Display18B20Rom(h);Display18B20Rom(g);Display18B20Rom(f);Display18B20Rom(e);Display18B20Rom(d);Display18B20Rom(c);Display18B20Rom(b);Display18B20Rom(a);while(1);}/***************************************************//* 延时函数:void delay() *//* 功能:延时函数 *//***************************************************/void delay(uint z)//延时函数{uint x,y;for( x = z; x > 0; x-- )for( y = 110; y > 0; y-- );}/***************************************************//* DS18B20函数:void DS18B20_Reset() *//* 功能:复位18B20 */ /***************************************************/void DS18B20_Reset(void)//DQ18B20复位,初始化函数{uint i;DQ = 0;i = 103;while( i > 0 ) i--;DQ = 1;i = 4;while( i > 0 ) i--;}/***************************************************//* DS18B20函数:void DS18B20_Readbit() *//* 功能:读1个字节数据函数 *//***************************************************/bit DS18B20_Readbit(void) //读1位数据函数{uint i;bit dat;DQ = 0;i++; //i++起延时作用DQ = 1;i++;i++;dat = DQ;i = 8;while( i > 0 )i--;return( dat );}/***************************************************//* DS18B20函数:void DS18B20_ReadByte() *//* 功能:读1个字节数据函数 */ /***************************************************/uchar DS18B20_ReadByte(void) //读1个字节数据函数{uchar i,j,dat;dat = 0;for( i = 1; i <= 8; i++ ){j = DS18B20_Readbit();dat = ( j << 7 ) | ( dat >> 1 );}return(dat);}/***************************************************//* DS18B20函数:void DS18B20_WriteByte() *//* 功能:向DQ18B20写一个字节数据函数 *//***************************************************/void DS18B20_WriteByte(uchar dat) //向DQ18B20写一个字节数据函数{uint i;uchar j;bit testb;for( j=1; j<=8; j++){testb = dat&0x01;dat= dat>>1;if(testb) //写1{DQ = 0;i++;i++;DQ = 1;i = 8;while(i>0)i--;}else{DQ = 0; //写0i = 8;while(i>0)i--;DQ = 1;i++;i++;}}}/***********************************************//* LCD函数:void LCD_WriteCom() *//* 功能:向LCD写入命令 *//***********************************************/void LCD_WriteCom(uchar com){rs = 0;P0 = com;delay(5);lcden = 0;delay(5);lcden = 1;delay(5);lcden = 0;}/***********************************************//* LCD函数:void LCD_WriteData(uchar dat) *//* 功能:向LCD写入数据 *//***********************************************/void LCD_WriteData(uchar dat){rs = 1; //选择LCD为写入数据状态lcden = 0;P0 = dat; //将待写入数据放到总线上delay(5);lcden = 1; //给LCD使能端一个脉冲delay(5); //信号将之前放到总线上lcden = 0; //的数据写入LCDdelay(5);}/***********************************************//* LCD函数:void LCD_Init() */ /* 功能:初始化LCD,设定LCD的初始状态 *//***********************************************/void LCD_Init(){LCD_WriteCom(0x38); //LCD显示模式设定delay(15);LCD_WriteCom(0x08); //关闭LCD显示delay(3);LCD_WriteCom(0x01); //LCD显示清屏delay(3);LCD_WriteCom(0x06); //设定光标地址指针为自动加1delay(3);LCD_WriteCom(0x0c); //打开LCD显示,但不显示光标}/**********************************************//* */ /* 显示18B20序列号 *//* *//**********************************************/void Display18B20Rom(char Rom){uchar h,l;l = Rom & 0x0f; //取低4位h = Rom & 0xf0; //取高4位h >>= 4;if( ( h >= 0x00 )&&( h <= 0x09 ) )LCD_WriteData(h+0x30); //取ASCII码elseLCD_WriteData(h+0x37); //取ASCII码if( ( l >= 0x00 )&&( l <= 0x09 ) )LCD_WriteData(l+0x30); //取ASCII码elseLCD_WriteData(l+0x37); //取ASCII码}。
读取DS18B20温度,通过LCD1602显示出来,并输出控制
读取DS18B20温度,通过LCD1602显示出来,并输出控制电路原理图程序1.main.c#include #include"lcd.h"#include"temp.h" void LcdDisplay(int); sbit K1=P2^0;sbit K2=P2^1;sbit K3=P2^2;sbit K4=P2^3; extern int th=20; extern int tl=-10; sbit beep=P1^0;void main(){LcdInit(); LcdWriteCom(0xc7); LcdWriteData('C'); while(1){if(K1==0){Delay1ms(500);if(K1==0);th++;}if(K2==0){Delay1ms(500);if(K2==0);th--;}if(K3==0){Delay1ms(500);if(K3==0);tl++;}if(K4==0){Delay1ms(500);if(K4==0);tl--;}LcdDisplay(Ds18b20ReadTemp());}}void LcdDisplay(int temp){int i,tt,rr,mm;unsigned char datas[] = {0, 0, 0, 0},datas1[] = {0, 0, 0},datas2[] = {0, 0, 0};float tp;if(temp< 0){LcdWriteCom(0xc0);LcdWriteData('-');i=1;temp=temp-1;temp=~temp;tp=temp;temp=tp*0.0625*10+0.5;mm=-temp;}else{LcdWriteCom(0xc0);LcdWriteData('+');tp=temp;temp=tp*0.0625*10+0.5;mm=temp;}datas[0] = temp / 1000; datas[1] = temp % 1000 / 100; datas[2] = temp % 100 / 10; datas[3] = temp% 10;if(th < 0){LcdWriteCom(0x89);LcdWriteData('-');tt=-th;}else{LcdWriteCom(0x89);LcdWriteData('+');tt=th;}datas1[0] = tt / 100;datas1[1] = tt% 100 / 10; datas1[2] = tt % 10; LcdWriteCom(0x87); LcdWriteData('H'); LcdWriteCom(0x88); LcdWriteData(':'); LcdWriteCom(0x8a); LcdWriteData('0'+datas1[0]); LcdWriteCom(0x8b); LcdWriteData('0'+datas1[1]); LcdWriteCom(0x8c); LcdWriteData('0'+datas1[2]);if(tl < 0){LcdWriteCom(0x90);LcdWriteData('-');rr=-tl;}else{LcdWriteCom(0x90);LcdWriteData('+');rr=tl;}datas2[0] = rr / 100;datas2[1] = rr% 100 / 10; datas2[2] = rr % 10; LcdWriteCom(0x8e); LcdWriteData('L'); LcdWriteCom(0x8f); LcdWriteData(':'); LcdWriteCom(0x91); LcdWriteData('0'+datas2[0]); LcdWriteCom(0x92);LcdWriteData('0'+datas2[1]); LcdWriteCom(0x93); LcdWriteData('0'+datas2[2]);if(mm>=(th*10)||mm<=(tl*10)||th<=tl) beep=0;elsebeep=1;LcdWriteCom(0x80); LcdWriteData('T');LcdWriteCom(0x81); LcdWriteData('A');LcdWriteCom(0x82); LcdWriteData('I');LcdWriteData(' ');LcdWriteCom(0x84); LcdWriteData('A');LcdWriteCom(0x85); LcdWriteData('N');LcdWriteCom(0xc1); LcdWriteData('0'+datas[0]); LcdWriteCom(0xc2); LcdWriteData('0'+datas[1]);LcdWriteCom(0xc3);LcdWriteData('0'+datas[2]);LcdWriteCom(0xc4);LcdWriteData('.');LcdWriteCom(0xc5);LcdWriteData('0'+datas[3]);LcdWriteCom(0xc6);LcdWriteData('"');}2.lcd.h#ifndef __LCD_H_/********************************** 当使用的是4位数据传输的时候定义,使用8位取消这个定义**********************************/ #define LCD1602_4PINS /********************************** 包含头文件#include//---重定义关键词---//#ifndef uchar#define uchar unsigned char#endif#ifndef uint#define uint unsigned int#endif/********************************** PIN口定义**********************************/ #define LCD1602_DATAPINS P0sbit LCD1602_E=P2^7;sbit LCD1602_RW=P2^5;sbit LCD1602_RS=P2^6;/********************************** 函数声明/*在51单片机12MHZ时钟下的延时函数*/ void Lcd1602_Delay1ms(uint c); //误差0us /*LCD1602写入8位命令子函数*/void LcdWriteCom(uchar com);/*LCD1602写入8位数据子函数*/void LcdWriteData(uchar dat) ;/*LCD1602初始化子程序*/void LcdInit();#endif3.temp.h#define __TEMP_H_#includesbit DSPORT=P3^7;void Delay1ms(unsigned int );unsigned char Ds18b20Init();void Ds18b20WriteByte(unsigned char com); unsigned char Ds18b20ReadByte();void Ds18b20ChangTemp();void Ds18b20ReadTempCom();int Ds18b20ReadT emp();#endif4.lcd.c#include"lcd.h"void Lcd1602_Delay1ms(uint c) //延时{uchar a,b;for (; c>0; c--){for (b=19;b>0;b--){for(a=1;a>0;a--);}}}#ifndef LCD1602_4PINS //当没有定义这个LCD1602_4PINS时void LcdWriteCom(uchar com) //写入一个字节命令{LCD1602_E = 0;LCD1602_RS = 0;LCD1602_RW = 0;LCD1602_DATAPINS = com;Lcd1602_Delay1ms(1);LCD1602_E = 1;Lcd1602_Delay1ms(5);LCD1602_E = 0;}#elsevoid LcdWriteCom(uchar com){LCD1602_E = 0;LCD1602_RW = 0;LCD1602_DATAPINS = com; //由于4位的接线是接到P0口的高四位,所以传送高四位不用改Lcd1602_Delay1ms(1);LCD1602_E = 1;Lcd1602_Delay1ms(5);LCD1602_E = 0;LCD1602_DATAPINS = com << 4; //发送低四位Lcd1602_Delay1ms(1);LCD1602_E = 1;Lcd1602_Delay1ms(5);LCD1602_E = 0;}#endif#ifndef LCD1602_4PINSvoid LcdWriteData(uchar dat) //写入一个字节数据{LCD1602_E = 0;LCD1602_RS = 1;LCD1602_DATAPINS = dat;Lcd1602_Delay1ms(1);LCD1602_E = 1;Lcd1602_Delay1ms(5);LCD1602_E = 0;}#elsevoid LcdWriteData(uchar dat){LCD1602_E = 0;LCD1602_RS = 1;LCD1602_RW = 0;LCD1602_DATAPINS = dat; //由于4位的接线是接到P0口的高四位,所以传送高四位不用改Lcd1602_Delay1ms(1);LCD1602_E = 1; //写入时序Lcd1602_Delay1ms(5);LCD1602_E = 0;LCD1602_DATAPINS = dat << 4; //写入低四位Lcd1602_Delay1ms(1);LCD1602_E = 1; //写入时序Lcd1602_Delay1ms(5);LCD1602_E = 0;}#endif#ifndef LCD1602_4PINSvoid LcdInit() //LCD初始化子程序{LcdWriteCom(0x38);LcdWriteCom(0x0c);LcdWriteCom(0x06);LcdWriteCom(0x01);LcdWriteCom(0x80);}#elsevoid LcdInit(){LcdWriteCom(0x32); LcdWriteCom(0x28); LcdWriteCom(0x0c); LcdWriteCom(0x06); LcdWriteCom(0x01); LcdWriteCom(0x80);}#endif5.temp.c#include"temp.h"void Delay1ms(unsigned int y) //延时{ unsigned int x;for(y;y>0;y--)for(x=110;x>0;x--);}unsigned char Ds18b20Init() //初始化{ unsigned int i;DSPORT=0;i=70;while(i--);DSPORT=1;i=0;while(DSPORT){i++;if(i>5000)return 0;//失败}return 1;//成功}void Ds18b20WriteByte(unsigned char dat) //写字节{unsigned int i,j;for(j=0;j<8;j++){DSPORT=0; //每写入一位数据之前先把总线拉低1us (数据手册上模糊)i++;DSPORT=dat&0x01;i=6;while(i--);DSPORT=1;dat>>=1;}}unsigned char Ds18b20ReadByte(){unsigned char byte,bi;unsigned int i,j;for(j=8;j>0;j--){DSPORT=0;i++;DSPORT=1;i++;i++;bi=DSPORT;byte=(byte>>1)|(bi<<7);i=4;while(i--);}return byte;}void Ds18b20ChangTemp() //温度转换{Ds18b20Init();Delay1ms(1);Ds18b20WriteByte(0xcc);Ds18b20WriteByte(0x44);}void Ds18b20ReadTempCom() //读取温度命令{ Ds18b20Init();Delay1ms(1);Ds18b20WriteByte(0xcc);Ds18b20WriteByte(0xbe);}int Ds18b20ReadT emp() //读取温度{int temp=0;unsigned char tmh,tml;Ds18b20ChangT emp();Ds18b20ReadTempCom();tml=Ds18b20ReadByte();tmh=Ds18b20ReadByte();temp=tmh;temp<<=8;temp|=tml;。
DS18B20的工作原理
DS18B20的工作原理DS18B20是一种数字温度传感器,具有高精度和数字输出的特点。
它采用一线通信协议,可以直接与微控制器通信,广泛应用于温度监测领域。
本文将详细介绍DS18B20的工作原理。
一、温度测量原理1.1 DS18B20采用数字式温度传感器芯片,内部集成了温度传感器和ADC转换器,能够直接输出数字信号。
1.2 DS18B20的温度传感器采用特殊的材料,随温度的变化而改变其电阻值,通过ADC转换器将电阻值转换为数字信号。
1.3 DS18B20的数字输出信号经过微处理器处理后,可以直接显示温度数值或者通过串口通信传输到其他设备。
二、通信协议2.1 DS18B20采用一线通信协议,只需一根数据线即可与微控制器通信,简化了连接方式。
2.2 通信协议中包括初始化、发送命令、读取数据等步骤,确保数据的准确传输。
2.3 通过一线通信协议,DS18B20可以实现多个传感器的串联连接,方便实现多点温度监测。
三、精度和分辨率3.1 DS18B20具有高精度的温度测量能力,温度测量误差仅为±0.5℃。
3.2 DS18B20的分辨率可调节,最高可达12位,能够满足不同应用场景的需求。
3.3 高精度和可调节的分辨率使得DS18B20在工业控制、医疗设备等领域得到广泛应用。
四、工作电压和功耗4.1 DS18B20的工作电压范围广泛,可在3V至5.5V之间工作,适用于不同的电源供应环境。
4.2 DS18B20的功耗较低,工作电流仅为1mA左右,可以节省能源。
4.3 低功耗和广泛的工作电压范围使得DS18B20适用于电池供电或者低功耗设备。
五、应用领域5.1 DS18B20广泛应用于温度监测系统、气象站、医疗设备等领域。
5.2 DS18B20的高精度和数字输出特点使得其在工业控制、实验室研究等领域得到广泛应用。
5.3 DS18B20的一线通信协议和低功耗特点使得其在移动设备、智能家居等领域具有广阔的应用前景。
DS18B20的使用法解析

DS18B20共有三种形态的存储器资源:
1、ROM 只读存储器,用于存放DS18B20的ID编码,其前8 位是单线系列编码(DS18B20的是 28H),后面48位是芯 片唯一的序列号,最后8位是以上56位的CRC码(冗余校验)。 数据在出产时设置不由用户更改。DS18B20共64位ROM。
2、RAM 数据暂存器,用于内部计算和数据存取,数据在掉 电后丢失,DS18B20共9个字节RAM,每个字节为8位。第1、 2个字节是温度转换后的数据值(温度寄存器),第3、4个字 节是用户EEPROM(温度报警值TH、TL储存)的镜像。在上 电复位时其值将被刷新。第5个字节则是用户第3个EEPROM 的镜像(配置寄存器)。第6、7、8个字节为计数寄存器,是 为了让用户得到更高的温度分辨率而设计的,同样也是内部温 度转换、计算的暂存单元。第9个字节为前8个字节的CRC码。 3、EEPROM 非易失性记忆体,用于存放长期需要保存的数 据,上下限温度报警值和校验数据,DS18B20共3位 EEPROM,并在RAM都存在镜像,以方便用户操作。
这是向RAM中写入数据的指令,随后写入的两 个字节的数据将会被存到地址2(报警RAM之TH) 和地址3(报警RAM之TL)。写入过程中可以用复 位信号中止写入。
Read Scratchpad (从RAM中读数据)[BEH]
此指令从RAM中读数据,读地址从地址0开始, 一直可以读到地址9,完成整个RAM数据的读出。芯 片允许在读过程中用复位信号中止读取,即可以不 读后面不需要的字节以减少读取时间。
Read Power Supply(工作方式切换)[B4H]
此指令发出后发出读时间隙,芯片会返回它的 电源状态字,“0”为寄生电源状态,“1”为外部 电源状态。
数字温度传感器DS18B20详解

一、概述传统的温度检测大多以热敏电阻为传感器,采用热敏电阻,可满足40℃至90℃测量范围,但热敏电阻可靠性差,测量温度准确率低,对于小于1℃的温度信号是不适用的,还得经过专门的接口电路转换成数字信号才能由微处理器进行处理。
目前常用的微机与外设之间进行的数据通信的串行总线主要有I2C总线,SPI总线等。
其中I2C总线以同步串行2线方式进行通信(一条时钟线,一条数据线),SPI总线则以同步串行3线方式进行通信(一条时钟线,一条数据输入线,一条数据输出线)。
这些总线至少需要两条或两条以上的信号线。
而单总线( 1-wire bus ),采用单根信号线,既可传输数据,而且数据传输是双向的,CPU 只需一根端口线就能与诸多单总线器件通信,占用微处理器的端口较少,可节省大量的引线和逻辑电路。
因而,这种单总线技术具有线路简单,硬件开销少,成本低廉,软件设计简单,便于总线扩展和维护。
同时,基于单总线技术能较好地解决传统识别器普遍存在的携带不便,易损坏,易受腐馈,易受电磁干扰等不足,因此,单总线具有广阔的应用前景,是值得关注的一个发展领域。
单总线即只有一根数据线,系统中的数据交换,控制都由这根线完成。
主机或从机通过一个漏极开路或三态端口连至数据线,以允许设备在不发送数据时能够释放总线,而让其它设备使用总线。
单总线通常要求外接一个约为4.7K的上拉电阻,这样,当总线闲置时其状态为高电平。
DS18B20数字式温度传感器,与传统的热敏电阻有所不同的是,使用集成芯片,采用单总线技术,其能够有效的减小外界的干扰,提高测量的精度。
同时,它可以直接将被测温度转化成串行数字信号供微机处理,接口简单,使数据传输和处理简单化。
部分功能电路的集成,使总体硬件设计更简洁,能有效地降低成本,搭建电路和焊接电路时更快,调试也更方便简单化,这也就缩短了开发的周期。
DS18B20单线数字温度传感器,即“一线器件”,其具有独特的优点:( 1 )采用单总线的接口方式与微处理器连接时仅需要一条口线即可实现微处理器与DS18B20的双向通讯。
DS18B20详细使用方法
DS18B20的详细使用方法1.DS18B20概述DS18B20数字温度计是DALLAS公司生产的1-Wire,即单总线器件,具有线路简单,体积小的特点。
因此用它来组成一个测温系统,具有线路简单,在一根通信线,可以挂很多这样的数字温度计,十分方便。
2、DS18B20产品的特点〔1〕.只要求一个端口即可实现通信。
〔2〕.在DS18B20中的每个器件上都有独一无二的序列号。
〔3〕.实际应用中不需要外部任何元器件即可实现测温。
〔4〕.测量温度范围在-55。
C到+125。
C之间。
〔5〕.数字温度计的分辨率用户可以从9位到12位选择。
〔6〕.内部有温度上、下限告警设置。
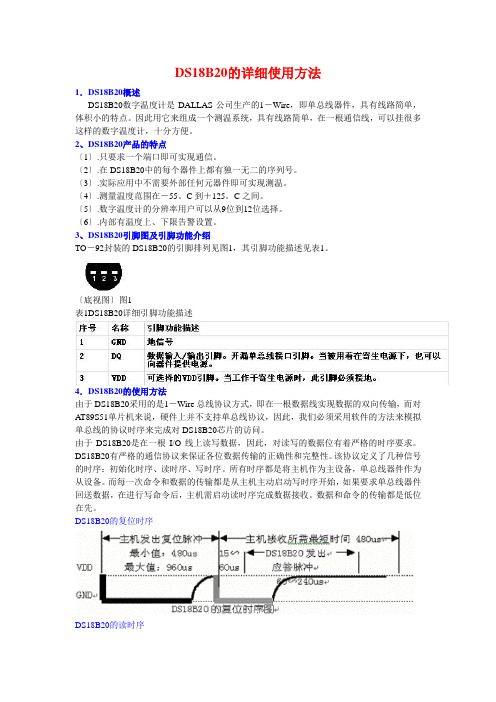
3、DS18B20引脚图及引脚功能介绍TO-92封装的DS18B20的引脚排列见图1,其引脚功能描述见表1。
〔底视图〕图1表1DS18B20详细引脚功能描述4.DS18B20的使用方法由于DS18B20采用的是1-Wire总线协议方式,即在一根数据线实现数据的双向传输,而对AT89S51单片机来说,硬件上并不支持单总线协议,因此,我们必须采用软件的方法来模拟单总线的协议时序来完成对DS18B20芯片的访问。
由于DS18B20是在一根I/O线上读写数据,因此,对读写的数据位有着严格的时序要求。
DS18B20有严格的通信协议来保证各位数据传输的正确性和完整性。
该协议定义了几种信号的时序:初始化时序、读时序、写时序。
所有时序都是将主机作为主设备,单总线器件作为从设备。
而每一次命令和数据的传输都是从主机主动启动写时序开始,如果要求单总线器件回送数据,在进行写命令后,主机需启动读时序完成数据接收。
数据和命令的传输都是低位在先。
DS18B20的复位时序DS18B20的读时序对于DS18B20的读时序分为读0时序和读1时序两个过程。
对于DS18B20的读时隙是从主机把单总线拉低之后,在15秒之内就得释放单总线,以让DS18B20把数据传输到单总线上。
DS18B20在完成一个读时序过程,至少需要60us才能完成。
DS18B20温度传感器使用简介
DS18B20温度传感器使⽤简介DS18xx系列温度传感器是数字式温度传感器,相对于传统温度传感器精度⾼、稳定性好、电路简单、控制⽅便,在这⾥以DS18B20为例做简单应⽤介绍。
详细资料请参阅芯⽚⼿册。
⼀、特性:(1)应⽤中不需要外部任何元器件即可实现测温电路。
(2)测温范围-55~+125℃,最⼤精度0.0625℃。
(3)只通过⼀条数据线即可实现通信。
(4)每个DS1820器件上都有独⼀⽆⼆的序列号,所以⼀条数据线上可以挂接很多该传感器。
(5)内部有温度上、下限告警功能。
⼆、操作简介DS18B20⼯作时需要接收特定的指令来完成相应功能(指令,可以简单的理解为可以被识别并有相应意义的⼀系列⾼低电平信号),它的指令可分为ROM指令和RAM指令;ROM指令主要对其内部的ROM进⾏操作,如查所使⽤DS18B20的序列号等,如果只使⽤⼀个DS18B20,ROM操作⼀般就可以直接跳过了;RAM指令主要是完成对其内RAM中的数据进⾏操作,如让其开始进⾏数据采集、读数据等。
DS18B20数字温度传感器是单总线器件,数据的读写只通过⼀条数据线进⾏并且这⼀条线上允许挂很多该传感器;这样对器件进⾏读写指令时就会⿇烦⼀些,必须应⽤特定时序来识别⾼低电平信号(如写⾼电平1,并不是把数据线直接拉⾼,⽽是⽤有⼀定时序关系的⾼低电平来代表写1),所以指令表中的0、1在写给DS18B20时就得变成代表0、1电平的时序段序列。
同样,从DS18B20读数据时,也是由特定的时序来完成数据读取。
对DS18B20进⾏读写的时序图如下:硬件连接⽅式有两种,⼀种是由单独电源供电(3~5V);第⼆种是由数据线为DS18B20供电(⼯作速度相对较慢)。
单独电源供电⽅式数据线为DS1820供电⽅式三、DS1820的⼯作过程:1. 复位操作2. 执⾏ROM操作的5条指令之⼀:1)读ROM,2)匹配ROM,3)搜索ROM,4)跳过ROM,5)报警搜索。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
}
void display(uint wendu){
uchar bai,shi,ge,sfen,bfen,qfen;
uchar s,tp,th,tl;
uint xs,flag;
flag=wendu&0x8000;
if(flag!=0)
wendu=~(wendu-1);
th=wendu/256;
ds_write(0xbe);
}
uint DSreadtemp(){
int temp=0;
uchar tmh,tml;
DSchange();
delayms(1);
DSreadtempcom();
tml=ds_read();
tmh=ds_read();
DS=1;
temp=tmh;
temp<<=8;
temp|=tml;
tl=wendu%256;
s=tl&0x0f;
xs=0.0625*s*1000;
th<<=4;
tl>>=4;
tp=th|tl;
bai=tp/100;
shi=(tp%100)/10;
ge=tp%10;
sfen=xs/100;
bfen=(xs%100)/10;
qfen=xs%10;//显示的百位十位个位以及小数点后三位
DS=ch&0x01;
delay6us(11);
DS=1;
delay6us(1);
ch>>=1;
}
}
void DSchange(){
DS=1;
init();
ds_write(0xcc);
ds_write(0x44);
}
void DSreadtempcom(){
DS=1;
init();
ds_write(0xcc);
DS=0;
delay6us(1);
DS=1;
delay6us(1);
bi=DS;
byt=(byt>>1)|(bi<<7);
delay6us(11);
}
return byt;
}
void ds_write(uchar ch){
uchar i;
for(i=0;i<8;i++){
DS=0;
delay6us(1);
DS=0;
delay6us(80);//延时480us以上
DS=1;
delay6us(15);
if(DS==0){
presence=0;
while(DS==0);
}
else
presence=1;
}
}
uchar ds_read(){
uchar byt,bi;
uchar i;
for(i=0;i<8;i++){
DS18B20温度读取及显示
DS18B20温度读取及显示
#include<reg51.h>
#define uchar unsigned char
#define uint unsigned int
#define wela P2
#define dula P0
uchar code table[]={0x3f,0x06,0x5b,0x4f, 0x66,0x6d,0x7d,0x07,0x7f,0x6f};
sbit DS=P3^7;
void delay6us(uchar z){
while(z--);
}
void delayms(uchar z){
uchar i,j;
for(i=0;i<z;i++)
for(j=0;j<160;j++);
}
void init(){
uchar presence=1;
while(presence){
wela=0;
if(flag!=0){
dula=0x40;//显示负号
}else
dula=0x00;
delayms(10);
wela=1;
if(bai!=0){
dula=table[bai];
}else
dula=0x00;
delayms(10);
wela=2;
dula=table[shi];
delayms(10);
wela=3;
dula=table[ge]|0x80;//加小数点
delayms(10);
wela=4;
dula=table[sfen];
delayms(10);
wela=5;
dula=table[bfen];
delayms(10);
wela=6;
dula=table[qfenΒιβλιοθήκη ;delayms(10);
}
void main(){
uint temp;
while(1){
temp=DSreadtemp();
display(temp);
}
}