步进电机控制驱动电路设计.
基于AT89C51单片机和ULN2003驱动芯片的步进电机控制及驱动电路系统的设计
基于AT89C51单⽚机和ULN2003驱动芯⽚的步进电机控制及驱动电路系统的设计摘要 (1)Abstract (2)第⼀章.绪论 (2)1.1设计背景 (4)1.2关于国内外同类产品的发展和应⽤ (4)1.3 本⽂所做的⼯作 (5)1.4 研究内容与安排 (5)第⼆章系统总体⽅案设计 (7)2.1 设计原理 (7)2.2 主要元器件介绍 (8)2.2.1 四相六线步进电机的介绍 (8)2.2.2 AT89C51单⽚机芯⽚介绍 (10)2.2.3 ULN2003芯⽚介绍 (11)2.2.4 LED七段数码管介绍 (12)第三章步进电机控制及驱动系统电路设计实现 (13)3.1 硬件设计 (13)3.2 软件设计 (17)第四章电路调试 (18)第五章总结 (20)致谢 (21)参考⽂献 (22)附录 (23)摘要本⽂主要研究了⼀种基于AT89C51单⽚机和ULN2003驱动芯⽚的步进电机控制及驱动电路系统的设计。
该系统可分为:控制模块、驱动模块、显⽰模块、⼈机交互模块四⼤部分。
其中采⽤AT89C51单⽚机作为控制模块的核⼼,利⽤单⽚机编程实现了对步进电机启动停⽌、正转反转、加速减速等功能的基本控制。
驱动模块由芯⽚ULN2003A驱动步进电机⼯作;显⽰部分由七段LED共阴数码管组成;⼈机互换部分由相应的按键实现相应的功能。
通过实际测试表明本设计系统的性能优于传统步进电机控制器,具有结构简单、可靠性⾼、实⽤性强、⼈机接⼝简单⽅便、性价⽐⾼等特点。
此外,本⽂还介绍了步进电机的基本原理及AT89C51单⽚机的性能特点。
关键词:步进电机;ULN2003; AT89C51;AbstractThis article mainly introduced the basic principle of stepping motor and the performance characteristics of AT89C51.Design research based on AT89C51 and ULN2003 stepper motor driver chips control and drive circuit system.The system can be divided into: control module, drive module, display module, human–computer interaction module.The AT89C51 single chip microcomputer as the core of the control module, microcontroller programming has realized the start stop the stepper motor, forward reverse, speed reducer, and other functions of basic control.Driver module driven by chip ULN2003A stepper motor;Display section is made up of seven segment digital tube LED, Yin;Man-machine interchangeable parts by the corresponding button to achieve the corresponding function.Through the actual test show that the system performance is superior to the traditional stepping motor controller is designed, with simple structure, high reliability and strong practicability, simple and convenient man-machine interface, high cost performance, etc.Key words: stepper motor;ULN2003;AT89S52 devices.摘要 (1)Abstract (2)第⼀章.绪论 (4)1.1设计背景 (4)1.2 关于国内外同类产品的发展和应⽤ (4)1.3 本⽂所做的⼯作 (5)1.4 研究内容与安排 (5)第⼆章系统总体⽅案设计 (7)2.1 设计原理 (7)2.2 主要元器件介绍 (8)2.2.1 四相六线步进电机的介绍 (8)2.2.2 AT89C51单⽚机芯⽚介绍 (10)2.2.3 ULN2003芯⽚介绍 (11)图2.6 ULN2003逻辑图 ..................................................................................................................... 11 2.2.4 LED 七段数码管介绍............................................................................................................... 12 图2.7六位LED 共阴数码显⽰管图 (12)第三章步进电机控制及驱动系统电路设计实现 (13)3.1 硬件设计 (13)1B 11C 162B 22C 153B 33C 144B 44C 135B 55C 126B 66C 117B77C10COM 9U2ULN2003AXTAL218XTAL119ALE 30EA31PSEN 29RST9P0.0/AD039P0.1/AD138P0.2/AD237P0.3/AD336P0.4/AD435P0.5/AD534P0.6/AD633P0.7/AD732P1.01P1.12P1.23P1.34P1.45P1.56P1.67P1.78 P3.0/RXD 10P3.1/TXD 11P3.2/INT012P3.3/INT113P3.4/T014P3.7/RD17P3.6/WR 16P3.5/T115P2.7/A1528P2.0/A821P2.1/A922P2.2/A1023P2.3/A1124P2.4/A1225P2.5/A1326P2.6/A1427U1AT89C51 ............................................................................................................................................................ 14 3.2 软件设计.. (17)第四章电路调试 ................................................................................................... 18 第五章总结............................................................................................................. 20 致谢......................................................................................................................... 21 参考⽂献................................................................................................................. 22 附录 . (23)第⼀章.绪论1.1设计背景电⽓时代的今天,电动机⼀直在现代化的⽣产和⽣活中起着⼗分重要的作⽤。
步进电机驱动电路

R11 R10 361x4
IC6 TCP521-4
1 io4 Vdd 16 2 io6 io2 15 3 o/i io1 14 4 io7 io0 13 5 io5 io3 12 6 inh a 11 7 Vee b 10 8 Vss c 9
+5V
13 1A
14 Vcc 12 1Y
Nc
11 5A
10 5Y
+15V
14
1
Vcc 1A
1Y
3
1B
2
E7 E12/47u25V +5V
IC9
5
NE555
C41
8 VCC 4 RST
R26
470u 35V
C7
103
7 DHE 3 OUT D1
2 TGR 5 CTL
3
4 2A 2Y 6 5 2B 9 1A 1Y 8
1B 10
C16
R27 333 D2
6 TSD 1 GND
78L15
2
PC6
47u
25V
E2
C2
47u
25V
E3
C3
47u
25V
PC3 PC3 47u 25V
PT3
1
Vin
Vout
3
GND
78L15
2
PC7
47u
25V
E4
C4
47u
25V
驱动/电源板: H2P-8AH.PCB
P
222
N
1kV
2
3 1/9 12
8 10/7
PD1
PT4
1
Vin
Vout
3
GND
步进电机工作原理及控制电路

//按键标志变量
flag1=0;
//步进数标志变量
init();
//液晶初始化子程序
while(1)
{
keyscan();
//键盘扫描子程序
if(flag==1)
{
zz();
//正转子程序
}
else if(flag==3) {
fz(); } writebjs(8,count); } }
//反转子程序
it 动机正转,其励磁顺序如图所示。若励磁信号反向传送,则步进电动机反转。励
磁顺序: A→AB→B→BC→C→CD→D→DA→A
A-B 表4.3 1-2 相励磁法
步进电动机的负载转矩与速度成反比,速度愈快负载转矩愈小,当速度快至 其极限时,步进电动机即不再运转。所以在每走一步后,程序必须延时一段时间。 下面介绍的是国产20BY-0型步进电机,它使用+5V直流电源,步距角为18度。电 机线圈由四相组成,即A、B、C、D四相,驱动方式为二相激磁方式,电机示意图 和各线圈通电顺序如图4.2和表4.1所示:
6
法增大起动电流,以提高步进电机转动力矩,即提高其工作频率。由于步进电机
是感性负载,所以进入绕组的电流脉冲是以指数形式上升,即这时电流脉冲i为:
i = IH (1 − e−1/Tj )
(4.4)
公式
其中:i是电流脉冲瞬时值;
IH 是在开关回路电压为u时的电流稳态值;
Tj 是开关回路的时间常数,Tj = L / ( RL + RC )
θ s = 2Π / Nrk
公式(4.1) 或
θ s = 360o / Nrk
公式(4.2)
其中:k是步进电机工作拍数,Nr是转子的齿数。
步进电机的驱动控制电路
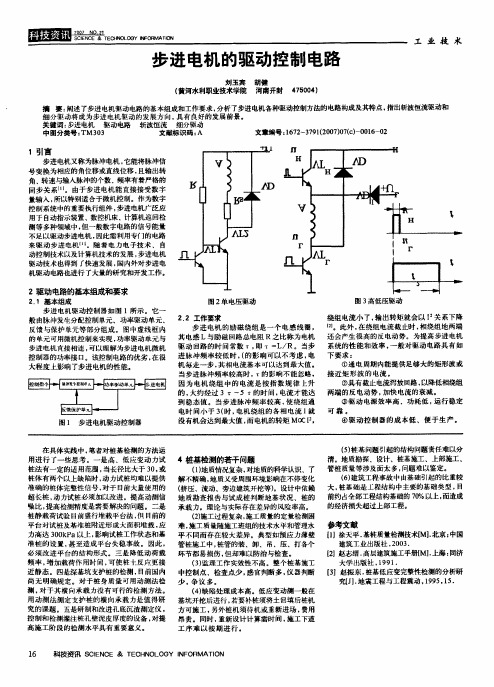
绕组电 流小了, 输出转矩就会以12关系下降 1 21。此外, 在绕组电流截止时, 相绕组地两端 还会产生很高的反电动势。为提高步进电机 系统的性能和效率, 一般对驱动电路具有如 下要求: ①通电周期内能提供足够大的矩形波或 接近矩形波的电流。 ② 具有截止电流泻放回路, 以降低相绕组 两端的反电动势, 加快电流的衰减。 ③驱动电源效率高、功耗低, 运行稳定
蓄雾 蓄粼蹂。动路斩曝 盘瓷 严电 波 曹
,引言 步进电 机又称为脉冲电 它 机, 能将脉冲信 号变 换为 相应的角位移或直线位移, 输出 且 转 角、 转速与 输入脉冲的 个数、 频率有着严格的 同步关系川。由于步进电机能直接接受数字 量输入, 所以特别适合于微机控制。作为数字
控制系统中的重要执行组件, 步进电机广泛应 用于自 动指示装置、 数控机床、 计算机巡回检 测等多种领域中, 但一般数字电路的信号能量 不足以驱动步进电机, 因此需利用专门的电路 来驱动步进电机川。随着电力电子技术、自 动控制技术以及计算机技术的发展, 步进电机 驱动技术也得到 了 快速发展, 国内外对步进电 机驱动电路也进行了大量的研究和开发工作。
图3 高低压驱动
图1 步进电机驱动控制器
2 .2 工作要求 步进电机的励磁绕组是一个电感线圈, 其电感L 与励磁回路总电阻R 之比称为电机 驱动回路的时间常数 T , T = L/ R 。当步 即 进脉冲频率较低时,的影响可以不考虑, ( 电 机每走一步, 其相电流基本可以达到最大值。 当步进脉冲频率较高时, 的影响不能忽略, T 因为电机绕组中的电流是按指数规律 上 升 的, 大约经过 3 r 一5 T 的时间, 电流才能达 到稳态值。当步进脉冲频率较高, 使绕组通 电时间小于 3(时, 电机绕组的各相电流 1就 没有机会达到最大值, 而电机的转矩 MOC12,
四相步进电机驱动电路及驱动程序设计
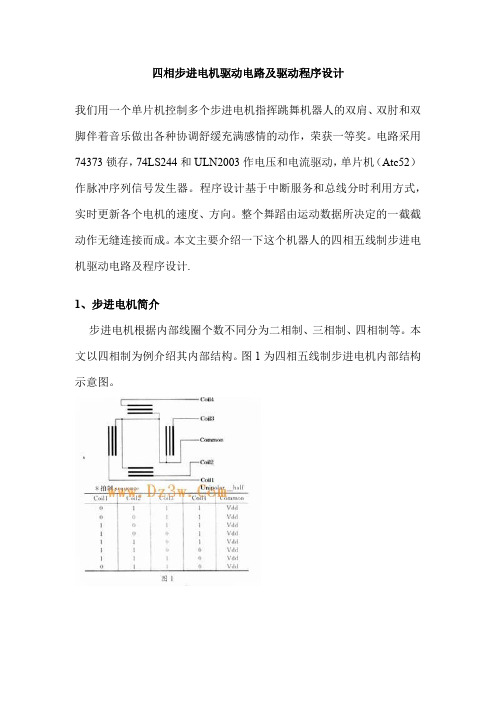
四相步进电机驱动电路及驱动程序设计我们用一个单片机控制多个步进电机指挥跳舞机器人的双肩、双肘和双脚伴着音乐做出各种协调舒缓充满感情的动作,荣获一等奖。
电路采用74373锁存,74LS244和ULN2003作电压和电流驱动,单片机(Atc52)作脉冲序列信号发生器。
程序设计基于中断服务和总线分时利用方式,实时更新各个电机的速度、方向。
整个舞蹈由运动数据所决定的一截截动作无缝连接而成。
本文主要介绍一下这个机器人的四相五线制步进电机驱动电路及程序设计.1、步进电机简介步进电机根据内部线圈个数不同分为二相制、三相制、四相制等。
本文以四相制为例介绍其内部结构。
图1为四相五线制步进电机内部结构示意图。
2、四相五线制步进电机的驱动电路电路主要由单片机工作外围电路、信号锁存和放大电路组成。
我们利用了单片机的I/O端口,通过74373锁存,由74LS244驱动,ULN2003对信号进行放大。
8个电机共用4bit I/O端口作为数据总线,向电机传送步进脉冲。
每个电机分配1bit的I/O端口用作74373锁存信号,锁存步进电机四相脉冲,经ULN2003放大到12V驱动电机运转。
电路原理图(部分)如图2所示。
(1)Intel 8051系列单片机是一种8位的嵌入式控制器,可寻址64K字节,共有32个可编程双向I/O口,分别称为P0~P3。
该系列单片机上集成8K的ROM,128字节RAM可供使用。
(2)74LS244为三态控制芯片,目的是使单片机足以驱动ULN2003。
ULN2003是常用的达林顿管阵列,工作电压是12V,可以提供足够的电流以驱动步进电机。
关于这些芯片的详细介绍可参见它们各自的数据手册。
(3)74373是电平控制锁存器,它可使多个步进电机共用一组数据总线。
我们用P1.0~P1.7作为8个电机的锁存信号输出端,见表1。
这是一种基于总线分时复用的方式,以动态扫描的方式来发送控制信号,这和高级操作系统里的多任务进程调度的思想一致。
步进电机驱动电路设计

步进电机驱动电路设iti耍隧着数字化技术发展,数字控制技术得對了广泛而深入的应用。
步进电机是一种将数字信号直接转换成轴位務或线位務的控制腿动元件,具有快速起动和停止的特点。
S 为步进电动机组成的控翎系统结构简单,价招低廉,性能上能满足工业腔制的基本要求, 所以广泛地应用于手工业自动控翎、数控机床、组合机床、机器人、il算机外围设备、照相机,投影仪、像机、大型望远镜、卫星天线定位系貌、医疗器件以员各种可腔机MIR等等。
直流电机广泛应用于it算机外围设备(如硬盘、軟盘和光盘存棒器)、家电产品、医疗器械和电动车上,无刷直流电机的转子部普遍使用永龜林料组成的磁鋼, 并且在航空、航天、汽车、精密电子等行业也被广泛应用。
在电工设备中的应用,除了直浦电磁铁(直济继电器、直滾接触器等)外,最重要的就是应用在直济废转电机中。
在发电厂里,同步发电Hl的助脱机、蓄电池的充电HI 等,都是直流发电Hl;錯炉给粉机的原动机是直流电动机。
此外,在许多工业部门,例如大塑轧鋼设备、大型精密机床、矿井卷畅机、市电车、电缆设备要求严怡线速度一致的地方等,通常都果用直流电动机作为原动机来isaji作机械的。
直逍发电机通常是作为直流电源,向负裁输岀电能;a 潦电动机则是作为原动机带动各种生产机械工作,向负我输出机械能。
在控初系坑中, 直潦电机还有其它的用迩,例如测速电机、何服电机等。
他们都是利用电和磁的相互作用来实现向机械能能的转换。
介鉛了步进电机和直流电机原理及其驱动程序控初控制模块,通11 AT89S52单片机及脉冲分配器(R林逻辑转换器)L298完成步进电机和宜流电机各种运行方式的控制。
实现步进电机的正反转速18控制并且显示数振。
整个系筑果用模快化设计,结枸简单、可靠,通il按建控制,操作方便,节省成本。
关鍵词:步进电机,单片机控制,AT89S52, L297, L2981步进电动机11.1步进电机简介11.2步进电机分类22步进电机工作原理32. 1步进电HI结构32. 2步进电机的旋转方武3 3设计原理53.1硕件电路组成53.2步进电机控制电路53.2.1廿数器工作模成63.2.2定时器工作模式6 4步进电机驱朋电路设it 74.1驱动芯片L29774.2驱动芯片L29884.3權盘电路94.4显示电路105步进电机控制程序11 总给14致15参考文151步进电动机1.1步进电机简介步进电动#1是一种稱电脉冲信号转換成角位務或线位務的精密执行元件,由于步进电机具有控制方便、体枳小等特点,所以在数控系统!自动生产线!自动灿表!绘图机和计算机外围设备中需到广泛应用。
步进电机驱动电路的设计
U’o确定参考电位 o UI1和UI2两者都 UI1和UI2两者都 小于各自的参考电 压时,Uo=1, 压时,Uo=1,放电 管截止; 管截止; UI1和UI2两者都 UI1和UI2两者都 大于各自的参考电 压时,Uo=0, 压时,Uo=0,放电 管导通; 管导通;
V CC
RD 4
vIC
5
8
vI1
tW
T
脉冲周期T: 脉冲周期 :在周期性重复的脉冲系列 两个相邻脉冲间的间隔时间。 中,两个相邻脉冲间的间隔时间。 脉冲频率f: 脉冲频率 :单位时间内脉冲重复的次数 f=1/T。 。 占空比D:脉冲宽度与脉冲周期的比值 占空比 : D=tw/T。 。
如何获得脉冲信号? 如何获得脉冲信号?
利用脉冲振荡器直接产生脉冲信号; 利用脉冲振荡器直接产生脉冲信号;
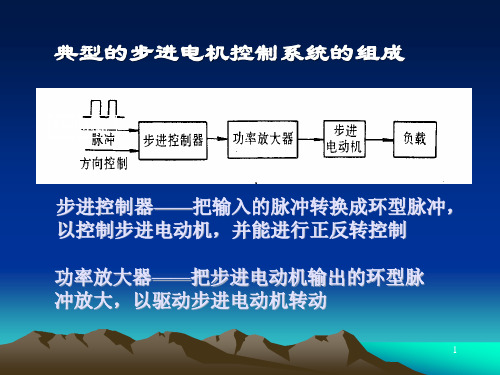
典型的步进电机控制系统的组成
时钟电路
步进控制器——把输入的脉冲转换成环型脉冲 步进控制器——把输入的脉冲转换成环型脉冲, 把输入的脉冲转换成环型脉冲, 以控制步进电动机, 以控制步进电动机,并能进行正反转控制 功率放大器——把步进电动机输出的环型脉 功率放大器——把步进电动机输出的环型脉 冲放大, 冲放大,以驱动步进电动机转动
L297接线图与控制时序 L297接线图与控制时序
L298内部结构原理图 L298内部结构原理图
L298是一 是一 种双全桥驱动电 路,可用来驱动 各种小型直流电 机、两相双极步 进电机和四相单 极步进电机。 极步进电机。
L297和L298构成的步进电机控制系统 L297和L298构成的步进电机控制系统
0.9U m 0.1U m
tr
tf
上升时间t 脉冲上升沿从 脉冲上升沿从0.1Um上升到 上升到0.9Um所需的 上升时间 r:脉冲上升沿从 上升到 所需的 时间。 时间。 下降时间t 脉冲下降沿从 脉冲下降沿从0.9Um下降到 下降到0.1Um所需的 下降时间 f:脉冲下降沿从 下降到 所需的 时间。 时间。
步进电机H桥功率驱动电路设计
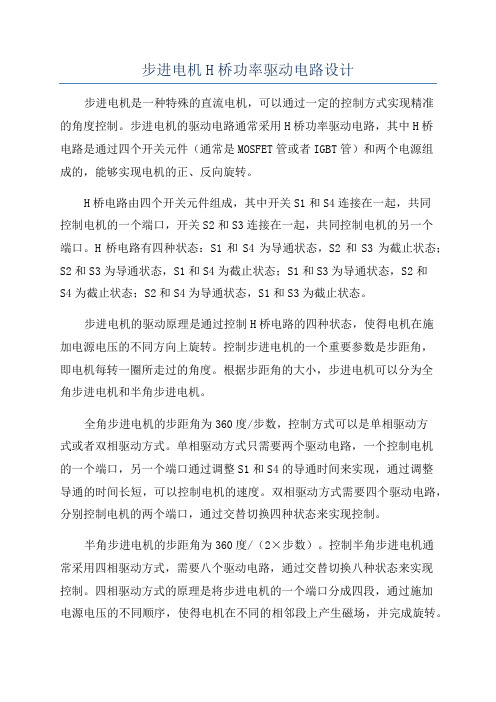
步进电机H桥功率驱动电路设计步进电机是一种特殊的直流电机,可以通过一定的控制方式实现精准的角度控制。
步进电机的驱动电路通常采用H桥功率驱动电路,其中H桥电路是通过四个开关元件(通常是MOSFET管或者IGBT管)和两个电源组成的,能够实现电机的正、反向旋转。
H桥电路由四个开关元件组成,其中开关S1和S4连接在一起,共同控制电机的一个端口,开关S2和S3连接在一起,共同控制电机的另一个端口。
H桥电路有四种状态:S1和S4为导通状态,S2和S3为截止状态;S2和S3为导通状态,S1和S4为截止状态;S1和S3为导通状态,S2和S4为截止状态;S2和S4为导通状态,S1和S3为截止状态。
步进电机的驱动原理是通过控制H桥电路的四种状态,使得电机在施加电源电压的不同方向上旋转。
控制步进电机的一个重要参数是步距角,即电机每转一圈所走过的角度。
根据步距角的大小,步进电机可以分为全角步进电机和半角步进电机。
全角步进电机的步距角为360度/步数,控制方式可以是单相驱动方式或者双相驱动方式。
单相驱动方式只需要两个驱动电路,一个控制电机的一个端口,另一个端口通过调整S1和S4的导通时间来实现,通过调整导通的时间长短,可以控制电机的速度。
双相驱动方式需要四个驱动电路,分别控制电机的两个端口,通过交替切换四种状态来实现控制。
半角步进电机的步距角为360度/(2×步数)。
控制半角步进电机通常采用四相驱动方式,需要八个驱动电路,通过交替切换八种状态来实现控制。
四相驱动方式的原理是将步进电机的一个端口分成四段,通过施加电源电压的不同顺序,使得电机在不同的相邻段上产生磁场,并完成旋转。
步进电机的驱动电路设计需要考虑以下几个问题:1.驱动电路的工作电压范围,要能适应电机的额定电压以及工作电压波动范围。
2.驱动电路的开关元件的选型,要能够满足电流和功率的要求,并具有足够的开关速度。
3.驱动电路的保护措施,要考虑过流、过热等异常情况的保护。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
下面的为对应的程序部分:
ORG 0000h
LJMP MAIN
MAIN: MOV P1,#0FFH
MOV SP,#30H
KEY: MOV A,#88H
MOV P0,A
MOV A,#00H
MOV P2,A
MOV A,#0FFH
MOV P3,A
JB P3.0,STOP
JNB P3.1,FOR3
JB P3.1,FOR6
JMP KEY
FOR3: JNB P3.2,FOR31
JB P3.2,FOR32
JMP FOR3
FOR31: JB P3.3,PLU31
JNB P3.3,REV31
JMP FOR31
FOR32: JB P3.3,PLU32
JNB P3.3,REV320
JMP FOR32
FOR6: JB P3.3,PLU60
方案四:使用单片机作为脉冲源和环形分配器
可以通过从单片机的引脚送出不同的信号来驱动电机,同时此方案有很好的人机交换的功能,在扩展功能的方面很好的空间,可以在其他引脚中送出信号来驱动七段数码管进而来显示不同的工作状态,也可以用单片机内部的定时器来计算速度的大小,进而显示出来,同时也可以增加按键的多少来扩展其他的功能。
RE31:MOV A,#0B7H
MOV P0,A
MOV A,#6EH
MOV P2,A
MOV A,R0
MOV DPTR,#TABLE
MOVC A,@A+DPTR
JZ REV31
MOV P1,A
JB P3.0,STOP
JB P3.3,PLU31
CALLDELAY
INC R0
JMP RE31
PLU32: MOV R0,#08H
关键字:555定时器脉冲源环行分配器功率放大电路
一、方案论证与比较:
(一)脉冲源的方案论证及选择:
方案一:采用555定时器产生脉冲,它工作频率易于改变从而可以控制步进电机的速度并且工作可靠,简单易行。
图一555定时器产生的方法
方案二:采用晶振电路来实现,晶振的频率较大,不利于电机的工作,易失步,我们可以利用分频的方法使晶振的频率变小,可以使电机工作稳定,但分频电路较复杂,并且晶振起振需要一定的条件,不好实现。
10单三拍正转
11单三拍反转
1 0双三拍正转
1 1双三拍反转
图七六拍正反转的实现
S1
1六拍正转
2六拍反转
注:这里所提供的电路图虽然我们做试验时没有采用,但它们都是我们仿真通过的电路图。
此方案较上一个方案有较大提高,但还是电路较复杂,操作不方面,这里并不采用。
方案四:我们采用具有置位,清零功能的JK触发器74LS76作为主要器件来设计环行分配器,在这里综合前三个方案的优点,设计出了各个方面性能都比较好的方案。它集合了方案一的置位的功能,综合了方案三的操作方面的功能,并且又在此基础上增加了复位的功能,使此更加具有实用性,更加具有批量生产性。
JNB P3.3,REV61
JMP FOR6
STOP: MOV A,#77H
MOVP0,A
MOV A,#0EEH
MOV P2,A
MOV P1,#0FFH
JB P3.0,$
CALL DELAY
JMP KEY
PLU31: MOV R0,#00H
P31: MOV A,0B1H
MOV P0,A
MOV A,62H
课程实习报告
实习名称:电子设计制作与工艺实习
学生姓名:周文生
学号:201216020134
专业班级:T-1201
指导教师:李文圣
完成时间:2014年6月13日
报告成绩:
步进电机控制驱动电路设计
摘要:
本设计在根据已有模电、物电知识的基础上,用具有置位,清零功能的JK触发器74LS76作为主要器件来设计环行分配器,来对555定时器产生的脉冲进行分配,通过功率放大电路来对步进电机进行驱动,并且产生的脉冲的频率可以控制,从而来控制步进电机的速度,环形分配器中具有复位的功能,在对于异常情况可以按复位键来重新工作。
P32: MOV A,#0B1H
MOV P0,A
MOV A,#73H
MOV P2,A
MOV A,R0
MOV DPTR,#TABLE
MOVC A,@A+DPTR
JZ PLU31
MOV P1,A
JNB P3.0,STOP
JNB P3.3,REV32
CALL DELAY
INC R0
JMP P32
REV61: JMP REV6
STOP1: JMP STOP
REV32 : MOV R0,#0CH
RE32: MOV A,#0B7H
MOV P0,A
MOV A,#07FH
MOV P2,A
MOV A,R0
MOV DPTR,#TABLE
MOVC A,@A+DPTR
JZ REV32
MOV P1,A
JNB P3.0,STOP1
JB P3.3,PLU32
CALL DELAY
INC R0
JMP RE32
PLU6: MOV R0,#10H
P6: MOV A,#0E1H
MOV P0,A
MOV A,#62H
MOV P2,A
MOV A,R0
MOV DPTR,#TABLE
MOVC A,@A+DPTR
JZ PLU63.3,REV6
MOV P2,A
MOV A,R0
MOV DPTR,#TABLE
MOVC A,@A+DPTR
JZ PLU31
MOV P1,A
JNB P3.0,STOP
JNB P3.3,REV31
CALL DELAY
INC R0
JMP P31
REV320:JMP REV32
PLU60:JMP PLU6
REV31: MOV R0,#04H
图三双三拍正转
图四单三拍正转
图五三相六拍正转
利用单独的做,电路图较简单,单具体操作时不方便,并且不利于工程设计。块分的较零散,无法统一。
方案三:利用JK触发器的自己运动时序特性设计,利用卡诺图来进行画简。
图六单,双三拍的电路图
单,双三拍的正,反转主要由键s1,s2的四种状态来决定四种情况的选择。
S1 s2
图二晶振产生脉冲源电路
综上所述,我们采用方案一来设计脉冲源。
(二)环形分配器的设计:
方案一:采用74ls194通过送入不同的初值来进行移位依此产生正确的值使步进电机进行转动。但此方案的操作较复杂,需要每次工作时都要进行置位,正反转的操作较复杂,这里很早的将此方案放弃。
方案二:使用单独的JK触发器来分别实现单独的功能。
CALLDELAY
INC A
JMP P6
REV6: MOV R0,#17H