图形学作业(已完成)
计算机图形学上机作业
计算机图形学(选作以下任意1—11题)1 用中点Bresenham 算法设计直线、圆、椭圆的算法,实现任意斜率的直线、圆、椭圆的绘制;2 使用有效边表算法填充多边形。
多边形的7个顶点分别为:P 0(500,400), P 1(350,600), P 2(250,350), P 3(350,50), P 4(500,250), P 5(700,50), P 6(800,450)。
3 使用四邻接点填充算法填充上述多边形。
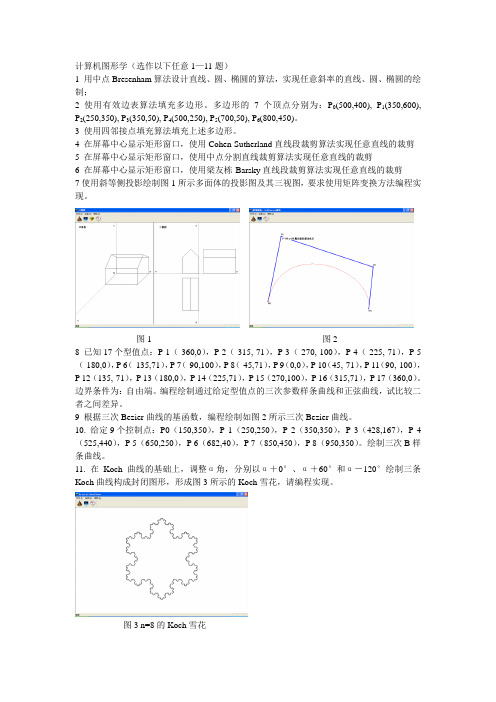
4 在屏幕中心显示矩形窗口,使用Cohen-Sutherland 直线段裁剪算法实现任意直线的裁剪5 在屏幕中心显示矩形窗口,使用中点分割直线裁剪算法实现任意直线的裁剪6 在屏幕中心显示矩形窗口,使用梁友栋-Barsky 直线段裁剪算法实现任意直线的裁剪7使用斜等侧投影绘制图1所示多面体的投影图及其三视图,要求使用矩阵变换方法编程实现。
图1 图28 已知17个型值点:P 1(-360,0),P 2(-315,-71),P 3(-270,-100),P 4(-225,-71),P 5(-180,0),P 6(-135,71),P 7(-90,100),P 8(-45,71),P 9(0,0),P 10(45,-71),P 11(90,-100),P 12(135,-71),P 13(180,0),P 14(225,71),P 15(270,100),P 16(315,71),P 17(360,0)。
边界条件为:自由端。
编程绘制通过给定型值点的三次参数样条曲线和正弦曲线,试比较二者之间差异。
9 根据三次Bezier 曲线的基函数,编程绘制如图2所示三次Bezier 曲线。
10. 给定9个控制点:P0(150,350),P 1(250,250),P 2(350,350),P 3(428,167),P 4(525,440),P 5(650,250),P 6(682,40),P 7(850,450),P 8(950,350)。
西电计算机图形学作业

1、结合个人的使用体会,谈谈显卡的主要技术指标主要技术指标:最大分辨率:当一个图像被显示在屏幕上时,它是由无数小点组成的,它们被称为像素(Pixel)。
最大分辩率是指显示卡能在显示器上描绘点的最大数量,一般以“横向点数X 纵向点数”表示。
色深:像素描绘是的是屏幕上极小的一个点,每一个像素可以被设置为不同的颜色和亮度。
像素的每一种状态都是三种颜:红、蓝、绿所控制,当它们都处于最大亮度时,像素就呈现为白色,;反之,像素为黑色。
像素的颜色数称为色深,该指标用来描述显示卡能够显示多少种颜色,一般以多少色或多少bit色来表示,如8bit色深可以显示256种颜色,16bit色深可显示65536种颜色,称为增强色,24bit色深可以显示16M 种颜色,称为真颜色,所以色深的位数越高,所能看见的颜色就越多,屏幕上画面的质量就越好。
但色深增加时,也增大了显示卡所要处理的数据量,这就要求显示卡配有更大显示内存并具有更高的转换速率。
刷新频率:刷新频率是指图像在显示器上更新的速度,也就是图像每秒在屏幕上出现的帧数,单位为Hz (赫兹)。
刷新频率越高,屏幕上图像的闪烁感就越小,图像越稳定,视觉效果也越好。
一般刷新频率在75Hz以上时,人眼对影像的闪烁才不易查觉。
这个性能指标主要取决于显示卡上RAMDAC的转换速度。
显存:如果说显存带宽决定了显卡的性能,那么显存位宽就决定了显存带宽,因为在相同频率下,64位显存的带宽只有128位显存的一半,当遇到大量像素渲染工作时,因为显存位宽的限制会造成显存带宽的不足,最直接的后果就是导致传输数据的拥塞,速度明显下降屏幕更新频率(Vertical刷新Rate)指显示器每秒能对整个画面重复更新的次数,若此数值为72Hz,表示显卡每秒将送出72张画面讯号给显示器。
在显卡中的渲染管线包括很多,比如像素渲染管线、纹理渲染管线、顶点渲染管线等等,它们在显卡中起到各自的作用。
体会:同型号同容量的情况下,可以比较:1.显存位宽(越大越好)以及显存用料比如GDDR1/GDDR2/GDDR3;2.核心频率和显存频率(越高越好)如:256bit/256M与128bit/256M;3.显卡的速度,就是几点几纳秒(越小越好),一般显卡的速度只有查显卡的说明书才能得出。
计算机图形学作业3-6
第三章作业1.(6分)名词解释:扫描转换、增量算法、反走样。
扫描转换:基本图形的光栅化就是在像素点阵中确定最佳逼近与理想图形的像素点集,并用指定颜色显示这些像素点集的过程。
当光栅化与按扫描线顺序绘制图形的过程集合在一起时,也称为扫描转移。
增量算法:在一个迭代算法中,如果每一步X,Y值是用前一步的值加上一个增量来获得的,那么,这个算法就称为增量算法。
反走样:用于减轻走样的技术称为反走样或者称为抗锯齿。
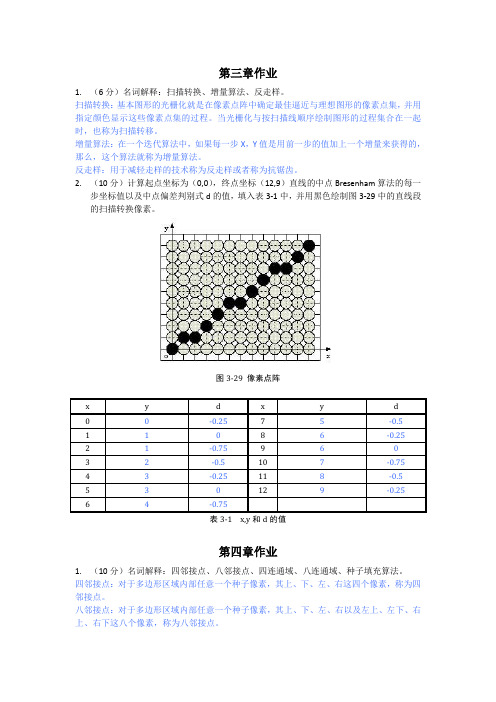
2.(10分)计算起点坐标为(0,0),终点坐标(12,9)直线的中点Bresenham算法的每一步坐标值以及中点偏差判别式d的值,填入表3-1中,并用黑色绘制图3-29中的直线段的扫描转换像素。
图3-29 像素点阵表3-1 x,y和d的值第四章作业1.(10分)名词解释:四邻接点、八邻接点、四连通域、八连通域、种子填充算法。
四邻接点:对于多边形区域内部任意一个种子像素,其上、下、左、右这四个像素,称为四邻接点。
八邻接点:对于多边形区域内部任意一个种子像素,其上、下、左、右以及左上、左下、右上、右下这八个像素,称为八邻接点。
四连通域:对于多边形区域内部任意一个种子子素出发,通过访问其上、下、左、右这四个邻接点可以遍历区域内部的所有像素,该多边形区域称为四连通域。
八连通域:对于多边形区域内部任意一个种子子素出发,通过访问其上、下、左、右以及左上、左下、右上、右下这八个邻接点可以遍历区域内部的所有像素,该多边形区域称为八连通域。
种子填充算法:从区域内任意一个种子像素开始,由内向外将填充色扩散到整个多边形区域的填充过程。
2. (10分)试写出图4-43所示多边形的边表和扫描线y =4的有效边表。
7654321O 12345678yx图4-43 多边形解:ET 表Y=4时的AET 表3. (10分)图中已知种子O ,试根据简单四连通种子填充算法按左、上、右、下入栈的顺序给出象素点填充的次序。
第五章作业1.(10分)名词解释:坐标变换、WCS、UCS、窗口、视区、窗视变换、裁剪、坐标变更:是坐标系发生变换,但物体位置不发生改变,然后在新坐标系下表示所有物体上的顶点。
计算机图形学 第七次课作业
序号姓名1张斌 计科113 114220432计科111 孙晓慧 114220233计科113-廖玉芹4计科111-11422074-李奇龙5计科111-11422056-唐永康6计科111 单学 114220357李天宇 计科112 114220308计科111 陈应平 114220539麻洋10计科113 11422034 任雪俏11计科111-11422050-祝林枫12计科113-李娜-1142205213计科113 毕英春14计科112班 曹坡 1142204815计科112 孙道猛 1142208716计科112 贾富杰1142206617宋晓彤,计科11318计科111 11422086 陆洋19计科112-11422051-刘祚亮20计科112张鹏威1142205721范永强22计科112-梁添-1142206023计科111—11422071—杜加南24计科112 颜飞25计科112-董博-1142207826谢正宇 计科113 1142208527计科112-和扬-1142209028计科111 于书森 114220322911422044-张怡晨-计科11130郭欢 计科113 1142201231计科113 孙聪 1142204032计科113 张忍 1142204633战明亮 1142203334郭徐佳-计科11235计科113 韩宗秋 1142201836计科111班-11422010-李国强37计科111高杰琼38强珺-计科11239计科113牟兴成40田乐乐--1142200741李意慧-计科113-1142205842李晓晗1142202643计科113 11422088 段玉麟44杜俊楠-计科113-1142206745计科112 崔博46计科1101 刘永生 1142200447计科112 栾永胜 1142201448付航-计科113-1142204949计科113 崔振伟50计科111 陈明 0942213051计科113班-陶贵生--11422061 5253时间评价2014年4月14日(星期一) 晚上6:12做的好2014年4月14日(星期一) 晚上7:56做的很好2014年4月14日(星期一) 晚上10:25做的很好2014年4月15日(星期二) 中午12:512014年4月15日(星期二) 中午12:57与李奇龙撞车2014年4月15日(星期二) 晚上9:18做的比较好2014年4月16日(星期三) 中午1:022014年4月16日(星期三) 下午3:562014年4月16日(星期三) 下午5:242014年4月16日(星期三) 晚上10:062014年4月16日(星期三) 晚上10:09与李奇龙撞车2014年4月16日(星期三) 晚上10:32做的比较好2014年4月17日(星期四) 上午10:342014年4月17日(星期四) 下午4:08与李天宇撞车2014年4月17日(星期四) 下午5:192014年4月17日(星期四) 晚上6:102014年4月17日(星期四) 晚上6:102014年4月17日(星期四) 晚上7:28与李奇龙撞车2014年4月17日(星期四) 晚上7:39做的比较好2014年4月17日(星期四) 晚上8:18做的比较好2014年4月17日(星期四) 晚上8:242014年4月17日(星期四) 晚上8:54做的好2014年4月17日(星期四) 晚上9:472014年4月17日(星期四) 晚上10:152014年4月18日(星期五) 中午12:06做的比较好2014年4月18日(星期五) 中午12:332014年4月18日(星期五) 下午2:332014年4月18日(星期五) 下午3:512014年4月18日(星期五) 晚上7:032014年4月18日(星期五) 晚上8:022014年4月18日(星期五) 晚上9:272014年4月18日(星期五) 晚上10:522014年4月18日(星期五) 晚上10:562014年4月19日(星期六) 下午5:522014年4月19日(星期六) 晚上10:192014年4月19日(星期六) 晚上10:382014年4月20日(星期天) 中午1:242014年4月20日(星期天) 下午3:24做的比较好2014年4月20日(星期天) 下午4:312014年4月20日(星期天) 晚上6:342014年4月20日(星期天) 晚上8:01做的比较好2014年4月20日(星期天) 晚上8:422014年4月20日(星期天) 晚上8:532014年4月20日(星期天) 晚上9:282014年4月20日(星期天) 晚上10:062014年4月20日(星期天) 晚上10:362014年4月20日(星期天) 晚上10:132014年4月21日(星期一) 中午11:452014年4月21日(星期一) 下午4:37做的比较好2014年4月21日(星期一) 晚上10:452014年4月21日(星期一) 下午4:45成绩AAABCABBBBCABCCBBCAABACBABBCBBBBBBCBBABBACBBBBB B A B B。
【图形学】课程大作业

【图形学】课程⼤作业【图形学】课程作业绘制机器⼈⾻架绘制球体(顶点数组和索引数组)GLint statcky =60;// 横向向切成多少⽚GLint stlicex =60;// 纵向切多少⽚const float PI =3.1415926;std::vector<float>drawglobeVBO(){std::vector<float> c;GLfloat R =0.5f;// 半径GLfloat angleHy =(GLfloat)(2* PI)/ statcky;// 横向每份的⾓度算出弧度值GLfloat angleZx =(GLfloat)(2* PI)/ stlicex;// 纵向每份的⾓度算出弧度值GLfloat NumAngleHy =0;// 当前横向⾓度GLfloat NumAngleZx =0;// 当前纵向⾓度GLfloat x =0;GLfloat y =0;GLfloat z =0;for(float j =0; j < statcky; j++){for(float i =0; i < stlicex; i++){NumAngleHy = angleHy * i;NumAngleZx = angleZx * j;// 起点都是轴指向的⽅向。
根据右⼿定则决定转向,只要转向相同,那么两个就合适 GLfloat x = R *cos(NumAngleHy)*cos(NumAngleZx);// 记得转化精度 yaw&&pitchGLfloat y = R *sin(NumAngleHy);GLfloat z = R *cos(NumAngleHy)*sin(NumAngleZx);c.push_back(x);c.push_back(y);c.push_back(z);}}return c;}std::vector<int>drawglobeEBO(){std::vector<int> ebo;std::vector<float> vbo =drawglobeVBO();int only = vbo.size();int num =(int)((only /(3* statcky))*2);for(int x =0; x < stlicex /2;){for(int y =0; y < statcky; y++){ebo.push_back(y + x * stlicex);ebo.push_back(y + x * stlicex +1);ebo.push_back(y + x * stlicex + stlicex);ebo.push_back(y + x * stlicex + stlicex +1);ebo.push_back(y + x * stlicex + stlicex);ebo.push_back(y + x * stlicex +1);}x = x +1;}return ebo;}参考链接:声明球体的顶点数组和索引数组。
计算机图形学作业
计算机图形学作业班级:070821学号:07082001姓名:董文凯简要说明液晶显示器的显示原理,及主要技术指标,并从个人应用方面说说你认为在选择液晶显示器是,应该注意哪些方面。
液晶显示器(LCD),是由六层薄板组成的平板式显示器。
其中第一层是垂直电极板:第二层是邻接晶体表面的垂直网格线组成的电解层;第三层是液晶层;第四层是与晶体另一面邻接的晶体网格线层,第五层是水平电极层;第六层是反射层。
液晶材料是由长晶线分子构成,各个分子在空间的排列通常处于和极化光,即极化方向相互垂直的位置。
光线进入第一层和极化方向垂直。
当光线通过液晶时,极化方向和水平方向的夹角是90度,这样光线可以通过水平极板,并到达两个极板之间的液晶层。
晶体在电场作用下,将排列成行并且方向相同,晶体在这种情况下不改变穿透光的极化方向。
若光在垂直方向被极化,就不能穿过后面的极板,光被遮挡,在表面上看到一个黑点。
在液晶显示器中晶体一旦被激化,他将保持此状态达几百毫秒,甚至当触发电压切断后任然保持这种状态不变,这对图形的刷新速度影响很大。
为了解决这一问题,在液晶显示表面的网格上有一个晶体管,通过晶体管的开关来快速改变晶体的状态,同时也用来控制状态改变的程度。
晶体管也可用来保存每个单元的状态,从而可随刷新频率而周期性地改变晶体单元的状态。
主要技术参数:1.可视面积2. 可视角度3. 点距4. 色彩度5. 对比值6. 亮度值7. 响应时间选购注意事项:1、接口选择各种平面显示器目前最大的差异在于所使用的接口,即模拟式或数字式,其各自的优缺点如下。
现今,为了搭配一般的视频界面卡,大多数的LCD显示器均提供模拟式接口,少数新型平面显示器采用数字式接口,目前还有些中高档液晶显示器,为达到良好的视觉效果,减少图像畸变,采用了DVI数字化接口。
2、可视角度单就当前市面上出售的LCD显示器来说,可视角度都是左右对称的,但上下就不一定了,上下可视角度通常都小于左右可视角度。
计算机图形学大作业文档
计算机图形学课程结课大作业学号5011110122学生姓名阿依萨丽姑丽·麦麦提专业计算机科学与技术班级计算机15-1班塔里木大学教务处制《计算机图形学》课程结课作业提示:1、请将答案写在此文档的相应位置,图形需在VC++ 6.0下客户区屏幕中心绘制,大小可以根据个人需求定制;2、请将相关的文档,包括程序的相关文档进行压缩,并将压缩文档上传到ftp://210.26.176.123“大作业电子版文档”文件夹下命名为“班级-学号-姓名”,纸质版于2014年12月19日下午18:00—20:00交到逸夫楼109。
一、选题(此题5分)请根据你抽中的题号,正确理解其所对应的简笔画。
请写出你选中的题号,将图粘贴到下方,并为其取一个合适的名字。
我选的题号是:20号图,名字为:房子。
二、组成(此题10分)请分析你所选择的题目,由哪些简单图形组成,并写出其所对应的函数或原理。
请在下方表格中简要写明函数的原型或原理的名字即可。
如果表格行数不够,请自行添加。
三、参数说明(此题15分)请写出相关函数的参数,并分析出每个参数的含义,要求此题务必写清每个函数的作用和使用方法。
画图的时候我使用了绘制直线段函数MoveTo()和LineTo()。
直线段的绘制过程中有一个称为“当前位置”的特殊位置。
每次绘制直线段都是以当前位置为起点,直线段绘制结束后,直线段的终点又成为当前位置。
由于当前位置在不断更新,所以使用LineTo()函数可以绘制连续直线。
(1)设置起点位置函数cpoint MoveTo(int x,int y);cpoint MoveTo(POINT point);参数:新位置的点坐标x和y;point是POINT结构或CPoint。
本函数只将画笔的当前位置移动到坐标x和y处,不画线。
(2)绘制直线段函数BOOL LineTo(int x,int y);BOOL LineTo(POINT point);参数:直线段终点坐标x和y;point是POINT结构或CPoint对象。
华中科技大学计算机图形学作业及答案

第一次1.计算机图形学的研究内容是什么?计算机图形学的发展和应用;计算机图形设备和系统;国际标准化组织(ISO) 发布的图形标准;人机交互接口技术;基本图形实体、自由曲线和自由曲面的生成算法;图形变换和裁剪;曲面和实体造型算法;颜色、光照模型及真实感图形显示技术与算法等内容。
结合讲课的内容需要经过一定量的编程实践才能掌握,加深理解。
通过本课程的学习,要求学生了解计算机图形学的基本概念和方法,以及计算机处理图形的全过程,并能利用综合图形环境开发计算机辅助设计应用软件2.试阐述图形、图像的本质要素。
图像可以看作是由许许多多个点组成的,这是计算机表示图像的基本思想。
即在计算机中,通过取样把图像进行分割,分成一个个的点,并给每一个点赋予一个颜色值。
在图像处理中,我们把这些点称为像素。
因此,数字图像是离散的。
计算机图形又称矢量图形,是由数学方法描述的。
无论放大到多大,其输出质量都非常好。
我们可对矢量图形进行位置、尺寸、形状、颜色的改变,图形仍能保持清晰、平滑,丝毫不会影响其最终的印刷质量。
3.计算机图形学的相关学科有哪些?它们之间的相互关系如何?与计算机图形学密切相关学科有图像处理和模式识别。
它们研究的都是与图形图象处理有关的数据模型、图象再现的内容,它们相互融合、相互渗透。
4.什么是像素点?1、计算机图形的种类从本质上讲,主要有两种计算机图形:一种为位图图像,即是把图像分割成若干个小方格,每个小方格称为一个像素点,由这些像素点排列组成的栅格,.被称为“光栅”,计算机通过表示这些像素点的位置、颜色、亮度等信息,从而表示出整幅图像。
2、数字图像将图像分割成非常细小的点,称为像素点,像素点的值表示该点图像的亮度.但是,近年来的研究指出,利用光合(A)与蒸腾(E)之比获得的水分利用效率(WUE=AE),通常称为瞬时水分利用效率(WUEi),与δ13C不呈现显著的正相关关系。
3、像素点是显示器显示画面的最小发光单位,由红、绿、蓝三个像素单元组成,在彩色显像管中,电子枪通常有三支排列成三角形的单色电子枪组成,称为△(delta)配置,而显示器的荧光层也采用三位一体的荧光体,即含有红色、绿色、蓝色荧光体,它们的排列方式和电子枪的排列方式相同,这三种基色通过不同的亮度组合即可产生各种颜色。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、什么是计算机图形学?答:是研究怎样用数学计算机生成、处理和显示图形的原理、方法与技术的一门学科。
2. 什么是图形?答:现实世界中能够在人的视觉系统中形成视觉印象的客观对象都称为图形。
3. 构成图形需包括哪两几面的要素?答:形状和颜色。
4. 计算机中表示图形有哪两种方法?答:有顶点表示和点阵法。
5. 什么是图像?答:一般是指实际拍摄或印刷出来的画面。
6. 计算机图形的研究对象?答:图形7. 图形和图像之间有什么关系?答:主要区别是表示方法不同。
图形用矢量表示,图像用点阵表示。
8. 计算机图形学的主要研究内容有哪些?答:1、几何造型技术2、图形生成技术3、图形处理技术4、图形信息的存储、检索与交换技术5、人机交互技术6、动画技术7、图形输入输出技术8、图形标准与图形软件包的研究与开发。
9. 计算机图形学的相关学科有哪些?答:计算几何、机械设计、工程制图、工业造型、多媒体技术等。
10. 计算机图形学有哪些主要应用领域?答:1、计算机辅助设计与制造2、电子出版及办公自动化3、计算机动画、娱乐及艺术4、地形地貌及地理信息系统5、实时控制及环境模拟6、科学计算的可视化7、计算机辅助教学8、图形用户界面11. 简述计算机图形系统的功能。
答:1、处理功能2、存储功能3、交互功能4、输入功能5、输出功能12. 简述计算机图形系统的组成。
答:由硬件系统和软件系统组成。
13. 图形硬件设备包括哪些?请按照分类列举出典型的图形硬件设备。
答:1、图形输入设备:键盘与鼠标、数字化仪、光笔、操纵杆、跟踪球和空间球、数据手套、触摸屏、扫描仪。
2、图形显示设备:阴极射线管显示器、随机扫描显示器、光栅扫描显示器、液晶显示器、等离子显示器、数字墨水。
3、图形硬拷贝设备:打印机、绘图仪、摄像机。
14. 图形显示设备有哪些?答:阴极射线管显示器、随机扫描显示器、光栅扫描显示器、液晶显示器、等离子显示器、数字墨水15. 什么是颜色查找表?简述颜色查找表的工作原理。
答:在帧缓存和显示屏的数/模转换器之间添加一个颜色查找表,使显示器在帧缓存单元位数不增加的情况下,具有大范围挑选颜色的能力。
其原理是可被看作一维线性表,其每一项内容对应一种颜色,表长度由帧缓存的位平面数N决定,有2N项,这就确定了一副画面能显示的颜色种类数。
16. 什么是像素、分辨率、帧缓存?答:像素是单位面积中构成图像的点的个数。
分辨率,是指可以显示出的水平和垂直像素的数组。
帧缓存是显存的一部分,帧缓存的每一片元与显示屏上的每一像素存在一一对应关系17. 针对分辨率分别是640×480像素,1024×768像素,2560×2480像素的光栅显示系统,如每个像素用12位存储,这些系统各需要多大容量的帧缓存?如果每个像素都用24位存储呢?答:640×480×12=3686400位=3MB 1024×768×12=9437184位=9MB2560×2480×12=76185600位=76MB640×480×24=7372800位=7MB 1024×768×24=18874368位=18MB2560×2480×24=152371200位=152MB18. 阴极射线管CRT由哪几部分组成?它们的功能分别是什么?答:由电子枪、偏转系统和荧光屏组成。
电子枪发射电子束(阴极射线)、偏转系统控制电子束在屏幕上的轨迹、荧光屏被电子束轰击时发出光亮。
19. 计算机图形软件标准的作用是什么?答:方便从一个硬件系统移植到另一个,应用于不同的硬件系统。
20. 计算机图形软件标准有哪两类?答:图形支持软件标准、图形数据存档和传输标准。
21. 有哪些常用的计算机图形软件标准,各有什么功能?答:图形核心系统、程序员层次交互式图形系统、图形库、计算机图形元文件、初始图形数据交换规范、产品数据交换标准、可缩放矢量图形。
22. 简述什么是数字图像处理?答:是通过计算机对图像进行去除噪声、增强、复原、分割、提取特征等处理的方法和技术。
23. 简述什么是计算几何?答:研究几何模型和数据处理的学科,讨论几何形体的计算机表示、分析和综合,研究如何方便、灵活、有效地建立几何形体的数学模型,以及在计算机中更好地存储和管理这些模型数据。
24. 简述什么是计算机视觉(Computer Vision)与模式识别(Pattern Recognition)?参考答案暂不公布25. 计算机图形学与其相关学科之间的关系?答:他们之间相互联系、可相互转化。
26. 简述计算机图形学的发展历程。
答:字符显示器、矢量显示器、三维图像扫描显示器、三维图形工作站、专用图形处理芯片、新的计算形式、数字墨水。
27. 简述计算机图形硬件的发展。
答:计算机图形硬件的发展非常迅速,对于高性能应用,已有不少复杂的、专用的图形硬件设备和技术可供选用。
28. 简述计算机图形软件及标准的发展。
答:计算机图形软件的发展也非常快,越来越多的软件被大家所接受。
29. 简述计算机图像学的最新发展动态。
答:计算机图像学最终将会支持几乎所有领域计算机应用交互图形对话的基础技术,服务于越来越多的方面。
30. 简述计算机图形系统的分类。
答:(1)用现有的某种计算机语言写成的图形子程序包,如GKS,PHIGS,GL等;(2)扩充某一种计算机语言,使其具有图形生成和处理功能;(3)专用的图形系统。
对于某种类型的设备,可以配备专用的图形生成语言,如HP-PLOT图形语言。
32. 简述光栅图形扫描显示器的工作原理。
答:工作原理:在这种显示器中,电子束的运动轨迹是固定的。
即从左到右、自上而下扫描荧光屏,来产生一幅光栅。
特点:由于图形是以点阵的形式存储在帧缓冲器中。
所以光栅扫描显示器的电子束按从上到下、从左到右的顺序依次扫描屏幕,来建立图形。
33. 查阅资料,分析图形显示的最新技术。
答:有液晶显示器、等离子显示器、数字墨水等先进的技术。
34. 简述计算机图形软件系统的组成。
答:图形软件的分层。
由下到上分别是:①图形设备指令、命令集、计算机操作系统②零级图形软件③一级图形软件④二级图形软件⑤三级图形软件。
35. 什么是图形的扫描转换?答:对图形的扫描转换一般分为两个步骤:光确定有关象素,再用图形的颜色或其它属性,对象素进行某种写操作。
后者通常是通过调用设备驱动程序来实现的。
所以扫描转换的主要工作,是确定最佳逼近于图形的象素集。
36. 简述数值微分法的算法步骤。
答:此法主要内容为先算出直线的斜率k=△y/△x 其中, △x=x1-x0, △y=y1-y0,(x0,y0)和(x1,y1)分别是直线的端点坐标。
然后,从直线的起点开始,确定最佳逼近于直线的y坐标均为整数,让X从起点到终点变化,每步递增1,计算对应的y坐标,y=kx+B,并取象素(x,round(y))。
用这个方法既直观,以可行,然而效率低。
37. 利用数值微分法扫描转换直线段P0(0, 0)和P1(5, 2)。
答:x int(y+0.5) y+0.50 0 01 0 0.4+0.52 1 0.8+0.53 1 1.2+0.54 2 1.6+0.538. 简述数值微分法的算法原理。
参考答案暂不公布39. 如何利用数值微分法扫描转换任意斜率的直线段?参考答案暂不公布40. 简述中点画线法的算法步骤。
答:假定直线斜率k在0~1之间,当前象素点为(x p,y p),则下一个象素点有两种可选择点P1(x p+1,y p)或P2(x p+1,y p+1)。
若P1与P2的中点(x p+1,y p+0.5)称为M,Q为理想直线与x=x p+1垂线的交点。
当M在Q的下方时,则取P2应为下一个象素点;当M在Q的上方时,则取P1为下一个象素点。
41. 利用中点画线法扫描转换直线段P0(0, 0)和P1(5, 2)。
答: a=y0-y1=-2; b=x1-x0=5; d0=2*a+b=1;d1=2*a=-4;d2=2*(a+b)=6 ,x y d0 0 11 0 -32 1 33 1 -14 2 55 2 1542. 简述中点画线法的算法原理。
答:假定直线斜率k在0~1之间,当前象素点为(x p,y p),则下一个象素点有两种可选择点P1(x p+1,y p)或P2(x p+1,y p+1)。
若P1与P2的中点(x p+1,y p+0.5)称为M,Q为理想直线与x=x p+1垂线的交点。
当M在Q的下方时,则取P2应为下一个象素点;当M在Q的上方时,则取P1为下一个象素点。
43. 简述Bresenham画线法的算法步骤。
答:设直线方程为y i+1=y i+k(x i+1-x i)+k。
假设列坐标象素已经确定为x i,其行坐标为y i。
那么下一个象素的列坐标为x i+1,而行坐标要么为y i,要么递增1为y i+1。
是否增1取决于误差项d的值。
误差项d的初值d0=0,x坐标每增加1,d的值相应递增直线的斜率值k,即d=d+k。
一旦d≥1,就把它减去1,这样保证d在0、1之间。
当d≥0.5时,直线与垂线x=x i+1交点最接近于当前象素(x i,y i)的右上方象素(x i+1,y i+1);而当d<0.5时,更接近于右方象素(x i+1,y i)。
为方便计算,令e=d-0.5,e的初值为-0.5,增量为k。
当e≥0时,取当前象素(x i,y i)的右上方象素(x i+1,y i+1);而当e<0时,取(x i,y i)右方象素(x i +1,y i)。
44. 利用Bresenham画线法扫描转换直线段P0(0, 0)P1(5, 2)。
答:x y e0 0 -0.51 0 -0.12 1 -0.73 1 -0.342-0.95 2 -0.546. 简述Bresenham画线法的算法原理。
答:过各行各列象素中心构造一组虚拟网格线。
按直线从起点到终点的顺序计算直线与各垂直网格线的交点,然后确定该列象素中与此交点最近的象素。
该算法的巧妙之处在于采用增量计算,使得对于每一列,只要检查一个误差项的符号,就可以确定该列的所求象素47. 如何利用圆的八分对称性画圆?参考答案暂不公布48. 简述中点圆线法的算法原理。
答:中点画圆算法在一个方向上取单位间隔,在另一个方向的取值由两种可能取值的中点离圆的远近而定。
实际处理中,用决策变量的符号来确定象素点的选择,因此算法效率较高。
49. 简述中点圆线法的算法步骤。
答:设要显示圆的圆心在原点(0,0),半径为R,起点在(0,R)处,终点在(,)处,顺时针生成八分之一圆,利用对称性扫描转换全部圆。
51. 简述Bresenham圆线法的算法步骤。