电液位置伺服控制系统实验
电液位置伺服系统无静差跟踪控制研究
控制精度要求高的场合 , 常规 PD调节就难 以得到满 I
( ) B片振子 的电压大小不 同, 2 A、 频率相 同 , 但
相位相同时 ,如图 4 所示) 片的变形大小不等 , ( b 两 弯 曲方向相同。泵的流量在 O ~Q之间变化。
基金项目: 甘肃省自 然科学基金重点资助项目( 8一2- 2 91 2 2) A 0 作者简介 : 杨逢瑜 (98 , 甘肃兰州人 , 14~)男, 教授 , 学士 , 主 要从 事液压 技术方面的科研 和教 学工作 。
况;
[] 曲庆璋, .弹性理论 [ .北京: 5 等 M] 冶金 工业出版社 ,
19 9 7,
()根据两 片振 子上施加 电压的 大小和相 位不 3 同, 分析 了微泵流量 的可调性 , 从而可对以后设计流量
[] 龚曙光. N Y 6 A S S基础应用及范例解析[ . M] 北京: 机械
( 兰州理 工大 学 流体动力与控制学 院, 甘肃 兰州 705 ) 300
摘
要: 针对周期性、 多频扰动的电液 阎控摆动液压缸伺服 系统 , 设计 了一种 内模控制器, 以取代常规的
ቤተ መጻሕፍቲ ባይዱ
比例积分微分调节器。对模型准确和有误差的两种情况进行 了仿真和 实验 , 明有 内模无静差跟踪控 制器 表 使 电液阀控摆动液压缸 系统能输 出准确地跟踪参考输入 , 有效地消除了外干扰带来的误差 , 了无静差跟 实现 踪。该 系统对设计时的建模误差和外界干扰都具有较强的鲁棒性。
光 ,9 82 ( )2 3 3 . 19 ,0 4 :3 —2 6 [] 李 军 , . 4 等 收缩 管 张管 型无 阎压 电泵 的工作原 理 [] J. 压电与声光 ,0 0 2 ( )3 6—3 8 20 ,26 :7 7.
仿生液压四足机器人电液伺服控制系统的设计与研究共3篇
仿生液压四足机器人电液伺服控制系统的设计与研究共3篇仿生液压四足机器人电液伺服控制系统的设计与研究1仿生液压四足机器人电液伺服控制系统的设计与研究随着科学技术的不断发展,仿生机器人技术越来越成熟,已经被广泛应用于工业自动化和医疗领域。
仿生液压四足机器人是一种非常先进的仿生机器人,它可以在各种恶劣的环境下进行机械装卸、军事侦察、救援救灾等工作。
在众多的机器人种类中,液压四足机器人具有结构简单、运动灵活、负载能力强、自适应性好等优点,广泛应用于军事、救援、能源、建筑、农业等领域。
本文介绍了仿生液压四足机器人的电液伺服控制系统设计和研究。
液压四足机器人的动力往往来自于液压系统,因此电液伺服控制系统是液压四足机器人运动控制的核心。
电液伺服控制系统是指将电信号转换为液压信号的系统,实现液压泵、阀门、执行器等的精确控制。
在液压四足机器人中,电液伺服控制系统的性能直接影响其运动控制精度和稳定性,因此设计一套高性能、高精度的电液伺服控制系统具有重要的意义。
电液伺服控制系统的设计过程需要考虑技术参数、系统结构、硬件设计、软件设计四个方面。
技术参数是指液压系统中传感器、执行器、电机等各个组成部分的规格参数。
在该机器人的设计过程中,需要根据机器人运动的需求和工作环境,综合设计机器人的各项技术参数。
其中,执行器的大小、电机的功率、传感器的灵敏度都需要精确计算和匹配,以保证机器人运动控制的稳定性和精度。
系统结构是指电液伺服控制系统中各个组成部分的排布方式,包括电液伺服控制器、液压泵、阀门、执行器、传感器等。
在设计中,需要考虑系统结构的简洁性、紧凑性、功耗等因素,以便于整机的使用和维护。
硬件设计包括电路设计和机械结构设计。
机械结构设计需要考虑机器人的形状、尺寸和材料等,以便于机器人的运动和受载能力。
电路设计则需要根据机器人的应用环境和技术参数,设计控制器、传感器、执行器等电路电子元器件。
软件设计包括程序设计和算法设计。
程序设计是指通过编写程序来实现机器人各种功能的控制,算法设计则是指通过算法来实现机器人的各种自适应控制功能。
电液伺服控制系统的应用实例
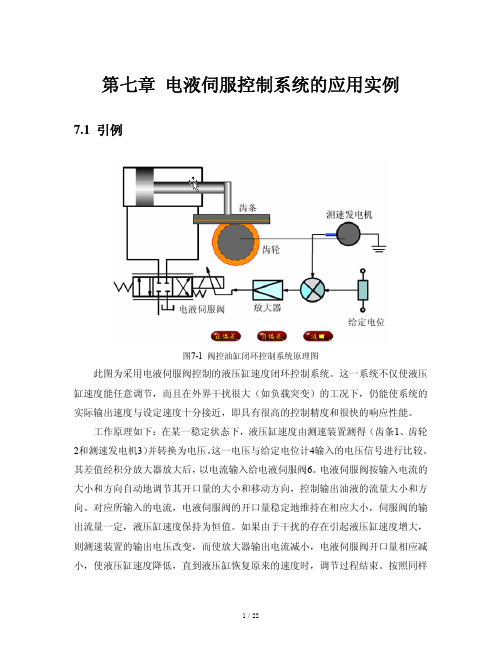
第七章 电液伺服控制系统的应用实例 7.1 引例图7-1 阀控油缸闭环控制系统原理图此图为采用电液伺服阀控制的液压缸速度闭环控制系统。
这一系统不仅使液压缸速度能任意调节,而且在外界干扰很大(如负载突变)的工况下,仍能使系统的实际输出速度与设定速度十分接近,即具有很高的控制精度和很快的响应性能。
工作原理如下:在某一稳定状态下,液压缸速度由测速装置测得(齿条1、齿轮2和测速发电机3)并转换为电压。
这一电压与给定电位计4输入的电压信号进行比较。
其差值经积分放大器放大后,以电流输入给电液伺服阀6。
电液伺服阀按输入电流的大小和方向自动地调节其开口量的大小和移动方向,控制输出油液的流量大小和方向。
对应所输入的电流,电液伺服阀的开口量稳定地维持在相应大小,伺服阀的输出流量一定,液压缸速度保持为恒值。
如果由于干扰的存在引起液压缸速度增大,则测速装置的输出电压改变,而使放大器输出电流减小,电液伺服阀开口量相应减小,使液压缸速度降低,直到液压缸恢复原来的速度时,调节过程结束。
按照同样原理,当输入给定信号电压连续变化时,液压缸速度也随之连续地按同样规律变化,即输出自动跟踪输入。
通过分析上述伺服系统的工作原理,可以看出伺服系统的特点如下:(1)反馈系统:把输出量的一部分或全部按一定方式回送到输入端,并和输入信号比较,这就是反馈作用。
在上例中,反馈电压和给定电压是异号的,即反馈信号不断地抵消输入信号,这就是负反馈。
自动控制系统中大多数反馈是负反馈。
(2)靠偏差工作:要使执行元件输出一定的力和速度,伺服阀必须有一定的开口量,因此输入和输出之间必须有偏差信号。
执行元件运动的结果又试图消除这个误差。
但在伺服系统工作的任何时刻都不能完全消除这一偏差,伺服系统正是依靠这一偏差信号进行工作的。
(3)放大系统:执行元件输出的力和功率远远大于输入信号的力和功率。
其输出的能量是液压能源供给的。
7.2 车床液压仿形刀架图7-2 车床液压仿形刀架车削圆锥面时,触销沿样件的圆锥段滑动,使杠杆向上偏摆,从而带动阀芯上移,打开阀口,压力油进入液压缸上腔,推动缸体连同阀体和刀架轴向后退。
《2024年电液伺服系统模糊PID控制仿真与试验研究》范文

《电液伺服系统模糊PID控制仿真与试验研究》篇一一、引言随着现代工业自动化技术的飞速发展,电液伺服系统作为重要组成部分,在众多领域中发挥着重要作用。
然而,由于电液伺服系统存在非线性、时变性和不确定性等特点,其控制问题一直是研究的热点和难点。
传统的PID控制方法在面对复杂多变的环境时,往往难以达到理想的控制效果。
因此,本文提出了一种基于模糊PID控制的电液伺服系统控制策略,并进行了仿真与试验研究。
二、电液伺服系统概述电液伺服系统主要由液压泵、液压马达、传感器和控制器等部分组成。
它利用电信号驱动液压系统工作,实现对负载的精确控制。
由于其具有高精度、快速响应等特点,在机械制造、航空航天、船舶等领域得到了广泛应用。
然而,由于电液伺服系统的复杂性,其控制问题一直是研究的重点。
三、模糊PID控制策略针对电液伺服系统的特点,本文提出了一种模糊PID控制策略。
该策略结合了传统PID控制和模糊控制的优点,通过引入模糊逻辑对PID参数进行在线调整,以适应系统参数的变化和环境干扰。
模糊PID控制策略能够在保证系统稳定性的同时,提高系统的响应速度和抗干扰能力。
四、仿真研究为了验证模糊PID控制策略的有效性,本文进行了仿真研究。
首先,建立了电液伺服系统的数学模型和仿真模型。
然后,分别采用传统PID控制和模糊PID控制对模型进行仿真实验。
通过对比两种控制策略的响应速度、稳态精度和抗干扰能力等指标,发现模糊PID控制在电液伺服系统中具有更好的性能。
五、试验研究为了进一步验证模糊PID控制策略的实用性,本文进行了试验研究。
在试验过程中,首先搭建了电液伺服系统的试验平台,然后分别采用传统PID控制和模糊PID控制对实际系统进行控制。
通过对比两种控制策略的试验结果,发现模糊PID控制在电液伺服系统中具有更高的稳态精度和更快的响应速度。
此外,在面对环境干扰时,模糊PID控制也表现出更强的抗干扰能力。
六、结论本文通过对电液伺服系统的模糊PID控制进行仿真与试验研究,验证了该策略的有效性。
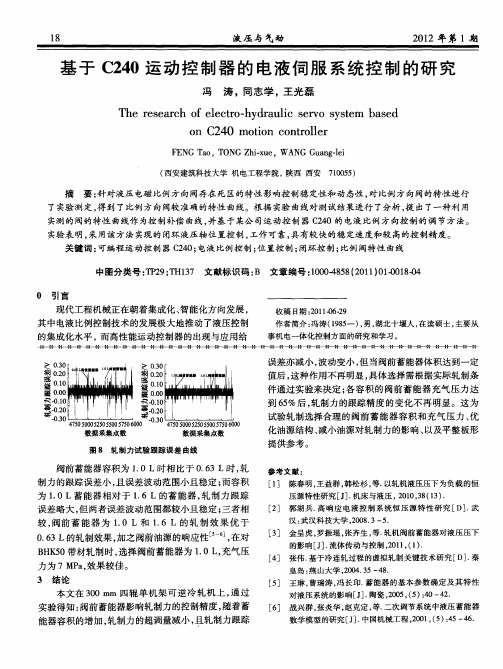
基于C240运动控制器的电液伺服系统控制的研究
的影响 [] 流体传 动与控制 , 1 ,1. J. 2 1() 0
[ ] 张伟. 4 基于冷连 轧过 程的虚 拟轧制关键技 术研究 [ . D] 秦
皇岛 : 山大学 ,04 3 4 . 燕 2 0 .5— 8
[ ] 王琳 , 5 曹瑞 涛 , 长印. 冯 蓄能器 的基本 参数确定 及其 特性
F ENG o,TONG ix Ta Zh —ue,W ANG Gua g li n —e
( 西安建筑科技大学 机 电工程学 院陕西 西安
7 05 ) 10 5
摘
要 : 对 液压 电磁 比例 方 向阀存 在死 区的特性 影 响控制 稳 定性和 动 态性 , 比例 方向 阀的特 性进 行 针 对
了实验测 定 , 到 了比例 方向 阀较 准确 的特性 曲线 。根 据 实验 曲线 对测试 结 果进行 了分析 , 出了一 种利 用 得 提 实测 的 阀的特 性 曲线作 为控 制补 偿 曲线 , 并基 于 某公 司运 动控 制 器 C 4 2 0的 电液 比例 方 向控 制 的调 节 方 法 。
差调 节 的 闭环控 制方 式 。 本 文研 究 了一种 基 于 运 动控 制 器 C 4 20的液 压伺
向时都会出现大的滞后性和冲击 , 这样就导致给定输
出与执 行 速 度 之 间 的 关 系 并 不 是 线 形 的 ( 图 2所 如
示) 。一 旦我 们还 以控 制 线 性 电气 轴 的模 型来 控 制 非 线性 液 压轴 , 速度 会非 常不 稳定 , 而且 位置 闭环会 不 停
度控制 , 达到了较高的控制精度和响应速度。 1 电液伺 服 系统 简介 电液伺服 系统 以其 响应速度 快 ( 相对 于机 械系 统 ) 负载 刚度 大 、 、 控制 功 率 大 等 独特 的优 点 在工 业 控
电液位置伺服控制系统实验
减小Ki
正常参数
Ki减小为40
Ki变小,ωc=1.53<2.78, ωh=14.8不变,Kg=24.5>19.1
增大Kd1
正常参数
Kd1变大为35
Kd1变大,ωc=2.1<2.78, ωh=17.1>14.8 ,Kg=21.8>19.1
减小Kd1
正常参数
Kd1减小为20
Kd1变小,ωc=3.45>2.78, ωh=12.9<14.8 ,Kg=16.8<19.1
2)阀控缸微分方程
负载流量线性化方程 流量连续性方程
忽略阀腔和管道总容积,油液的压缩性影响忽略
液压缸活塞的动力学平衡方程
3)缸输出位移对伺服阀输入电信号的传递函数 或写成:
2 伪微分反馈控制算法
对输出信号C 微分的积分仍是C,这就说明没有必要对C 进行微分
2
微分反馈控制方框图
伪微分反馈控制方框图
增大Kd2
正常参数
Kd2变大为3.3
Kd2变大,ωc=2.78不变, ωh=14.8不变,Kg=20.4>19.1
减小Kd2
正常参数
Kd2减小为0.6
Kd2变小,ωc=2.95基本不变, ωh=14.8不变,Kg=7.51<19.1
斜坡输入1
正弦输入
正弦输入,幅值5,频率1
正弦输入,幅值5,频率2.95
为能量输出单元在线 性范围内的最大值
为输入信号在线性范 围内的最大值
2
系统开环传递函数
代入系数得到
正常参数时的ωc=2.78, ωh=14.8,Kg=19.1
增大Ki
正常参数
Ki变大为120
Ki变大,ωc=4.39>2.78, ωh=14.8不变,Kg=15<19.1
电液位置同步伺服系统的模糊控制研究

和 k一1 别 表示 离散 时间 系统 的 当前 时 刻和前 一 时 分
复合控制器 , , 系统 具有 鲁棒 胜和精 确 性 为 r 使 验 证控 制性能 ,本 文将 这种 控制 器应 用 于 电液位 置 同步
系统的实时控 制 。 位置 同步系统 的结 构差异会 带来不同的控制 效果 ,
2 u 一PD复合控 制器 的设计 F z I
括死区 、摩擦和滞环 等 的非 线性 环 节 又是未 知 和时变
的。为解决上述 问题 ,很 多 研究 已被提 出 ,但 各有缺
陷 ,例如 PD控 制 器很 难 获得 满意 的效果 .自适 应控 I
制器通常要求较快 的 C U执行 速 度 .对于 时变性 较 陕 P 的液压控制系统难 于达到 良好的实 时性 。 自从模糊控 制 器 出现 以来 ,得 到 了广泛 应用 一通 常模糊控制器 由语 言 性控 制规 则 构成 .对于 输 八和输
维普资讯
《 机床与液压》90 o 1 , 2 N 0
・8 3
电液 位 置 同步 伺服 系统 的模 糊控 制研 究
管杨 新 ,胡 大邦 , 王 奕豫
( 炭 科 学研 究 总 院 上 海 分 院 液 压研 究 所 ,90 3 ) 堞 _ 00 0
本文对 同步 系统 中常用 的两种 控 制策 略进行 了 比较 和 分析 因 为它 们各 自都 有局 限性 ,所以综 台采 用两 种
策略的 同步系统可 获得更好的 动态和稳态特性 。 1 电液位置 同步控 制 系统 的组成
图 2 模 糊控制 系统方框图
采用 7个语言 模 糊集来 描述 所 有的输 入 、输 出模
P M P B P 8
P M P B
( )并 、串复台联接 C
电液伺服系统同步控制研究

两个 系 统共用 一 个 液压 泵 站 , 站 采 用 恒压 变 量 泵
随着 液压技 术在 工 程 领 域 中 的应 用 1 扩 大 , 3益 大 型设 备负 载能力 增加 或 因布局 的关 系需要 多个 执行元 件 同时驱 动一个 工作 部 件 , 因此 同 步控 制 就 显 得越 来 越重要 了。但 由于每 一个 液压 系 统 的 泄 漏 、 控制 元 件 间 的性 能差异 、 执行元 件 间负载 的差 异 、 各 系统各 组成 部分 的制造误 差等 因素 的影 响 … , 造 成 多执 行 机 构 将 的同步误 差 , 果不 有 效 地加 以控 制 并 克 服这 种 同步 如 误差 , 系统将不 能正 常工 作 。 本文 以北京 市科 委 支 持 项 目为背 景 , 以北 京 交 通 大学 液压伺 服控 制实验 室 夹持 同步控 制试 验平 台 的阀 控非 对称液 压缸 为研 究 对 象 , 夹持 同步 控 制 进 行试 对
( 聊城大学 汽车与交通工程学院 ,山东 聊城
2 20 ) 50 0
摘
要 : 文 以电液伺服 系统 的 常用执行 机 构 阀控 非对 称缸 为研 究对 象 , 同步对顶伺 服 系统进 行分析 该 对
和 试验研 究 , 建立 同步控 制 系统位 置扰动 型 力 学模 型 , 出位 置 闭环 一力跟 随控 制 策略 , 过 试验 实现 亍对 提 通
图 1 同步控制实验平台系统结构图
从事 自动控制 与液压控 制方 面的科研 和教学工作。
2
液压 与气动
21 0 0年第 6期
假设 以右边 的施 力 系 统 为 研究 对 象 , 边 的位 置 左 系 统为受 力对象 。得 到施力 机构 的力 方程
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
s2
2.834 2 0.866 1 2 s s s 1 2 14 .726 14 .726
正常参数时的ωc=2.78, ωh=14.8,Kg=19.1
增大Ki
正常参数
C (s) 4.611 R( s) 1 2 0.866 2 s 14 .726 2 s 14 .726 s 1
斜坡输入1
正弦输入
正弦输入,幅值5,频率1
正弦输入,幅值5,频率2.95
3 液压系统原理
压力传感器2
伺服缸
压力传感器3
平衡阀 电磁换向阀
蓄能器
电液伺服阀 压力传感器1
流量计2
流量计1 精滤器 电磁溢流阀
电机泵组
M
粗滤器 精滤器
4 系统控制原理
数据采集
参考输入
控制器
数模转换
功率放大
伺服阀
伺服缸
K i 73.746 KV 2.834 K d 1 26.022
K d1 h 代入系数得到 K d 1 26 .022 14 .726 h a a 0.12 (b K d 2 ) (b K d 2 ) (0.2 2.861) h h 0.866 2 K d1 a 2 K d 1 a 2 26.022 0.12
mmax 为能量输出单元在线 性范围内的最大值
r0,ml 为输入信号在线性范 围内的最大值
阶跃输入2.5
阶跃输入5
阶跃输入9
阶跃输入12
系统开环传递函数
KV C (s) R(s) 1 2 2 h s 2 s s 1 h h
Ki KV K d1
2)阀控缸微分方程
负载流量线性化方程
qL K q xV K c pL
流量连续性方程
Vt dpL dxP qL AP CtP pL dt 4 e dt
忽略阀腔和管道总容积,油液的压缩性影响忽略
dxP qL AP CtP pL dt
液压缸活塞的动力学平衡方程
d 2 xP dxP F AP pL mt BP FL 2 dt dt
3)缸输出位移对伺服阀输入电信号的传递函数
AP K q K SV X P (s) 2 E ( s ) ( K c CtP )mt s 2 ( AP K c BP CtP BP ) s
或写成:
X P ( s) 1 2 E ( s) as bs
2 伪微分反馈控制算法
对输出信号C 微分的积分仍是C,这就说明没有必要对C 进行微分
泵 出 口 流 量
进 入 缸 力 量
光 力 栅 位 信 移 号 信 号
切 换 阀 得 电 信 号
加 载 阀 得 电 信 号
吸 口 粗 滤 器 堵 塞
出 口 精 滤 器 堵 塞
回 油 精 滤 器 堵 塞
阶 跃 信 号
正 弦 信 号
斜 坡 信 号
第一组
第二组
第三组
第四组
第五组
要求:1、实验目的 1、求出PDF三个控制参数
测量反馈
R C -
ki D
M -
D/A
功放
伺服阀
伺服缸
kd1 kd 2 D
光栅尺
PCI-1712实物照片
AI0
AO0
压力传感器1
AGND AI1 AGND
10uf
AGND
伺服 放大器
220uf 220uf
压力传感器2
AI2 AGND
压力传感器3
AI3 AGND
220uf
流量传感器1
AI4 AGND
●
XD24 COMD XP24
COMP XP5 YHYH+ YSYS+
F X 2 n 1 H C
液压伺服试验台
数据采集模块
数据处理模块
控制模块
模 拟 量
脉 冲 量
开 关 量
软 件 滤 波
模 拟 量 输 出
图 形 显 示
P D F
P I D
泵 出 口 压 力
缸 A 口 压 力
缸 B 口 压 力
电液位置伺服控制系统实验
1、电液位置伺服控制系统的数学模型
1)伺服阀的传递函数 假定伺服阀的频宽较高,系统的固有频率较窄, 伺服阀的输入和阀芯位移之间近似看成一个比例环 节 X V ( s) K SV E ( s)
•当伺服阀的频宽与液压固有频率相近时,伺服阀可近似看成二阶振荡环节 •当伺服阀的频宽大于液压固有频率(3~5倍)时,伺服阀可近似看成惯性环节 •当伺服阀的频宽大于液压固有频率(5~10倍)时,伺服阀可近似看成比例环节
串口 编程线 计算机
●
COM
●
X0 24+ X1
X2 X3
X4 X5
X6 X7
B12+ ● ● ● ● ●
L
N
FX2n-16MR
● ● SB3 加载 YV1 HL3 24VGND +24V YV2 HL4
Y0 Y0 Y1
Y1 Y2
SB4 切换
Y2 Y3
Y3 Y4
Y4 Y5
Y5 Y6
Yห้องสมุดไป่ตู้ Y7
Y7
●
数据线
增大Kd1
正常参数
C (s) 2.107 R( s) 1 2 0.747 2 s 17 .078 2 s 17 .078 s 1
Kd1变大为35
Kd1变大,ωc=2.1<2.78, ωh=17.1>14.8 ,Kg=21.8>19.1
减小Kd1
3 1 3 1 10 1 2 mmax 2 ki 9.032 r 9.032 0.12 5 73 .746 a 0,ml m 10 k d 1 13.011 max 13 .011 26.022 r0,ml 5 1 a mmax 2 b 6.248 0.12 10 0.2 2.861 k d 2 6.248 r 5 0,ml
220uf 220uf
流量传感器2
AI5 AGND AI6 AGND
P C I 1 7 1 2 板 卡
PCI总线
计算机
220uf 220uf
力传感器
+24V 24VGND
AI7 AGND
Fx2n-16MR可编程控制器照片
+5V GND
A相 B相
LE-250
KP1 KP2 KP3
BGND
AGND
A12+ AA24+ A5+ B24+ BB5+ XD5
Ki变大为120
Ki变大,ωc=4.39>2.78, ωh=14.8不变,Kg=15<19.1
减小Ki
正常参数
C (s) 1.537 R( s) 1 2 0.866 2 s s s 1 2 14 .726 14.726
Ki减小为40
Ki变小,ωc=1.53<2.78, ωh=14.8不变,Kg=24.5>19.1
正常参数
C ( s) 3.687 R( s) 1 2 0.988 2 s 12.912 s 12 .91 s 1
Kd1减小为20
Kd1变小,ωc=3.45>2.78, ωh=12.9<14.8 ,Kg=16.8<19.1
增大Kd2
正常参数
C (s) 2.834 R(s) 1 2 0.99 2 s s s 1 2 14 .726 14.726
2、用Simulink作出时域响应曲线,并改变参数,体会参数变化对响应的影响
3、绘制开环伯德图,理解ωb、ωc、Kv的关系,提高频率响应的方法 4、实物电液位置伺服系统的构成、原理、步骤 5、实物电液位置伺服系统时域响应性能
Ki C (s) R ( s ) s[as2 (b K d 2 ) s K d 1 ] Ki K d1 1 s K d1 a (b K d 2 ) 2 2 K d1 a K d1 a s 1
R
E
ki s
L
1 as 2 bs
C
k d1 kd 2 2 1 s s ki ki
微分反馈控制方框图
FCE
R E
ki B1 M1 s
M2
L
1 as 2 bs
C
k d1 k d 2 s
伪微分反馈控制方框图
3 1 1 2 m max 2 k i 9.032 r a 0, ml m max k d 1 13.011 r0, ml 1 a m max 2 b k d 2 6.248 r 0, ml
Kd2变大为3.3
Kd2变大,ωc=2.78不变, ωh=14.8不变,Kg=20.4>19.1
减小Kd2
正常参数
C (s) 2.834 R( s) 1 2 0.226 2 s 14 .726 2 s 14 .726 s 1
Kd2减小为0.6
Kd2变小,ωc=2.95基本不变, ωh=14.8不变,Kg=7.51<19.1