华中科技大学第二章平面连杆机构及其设计
完整版华中科技大学机械原理2

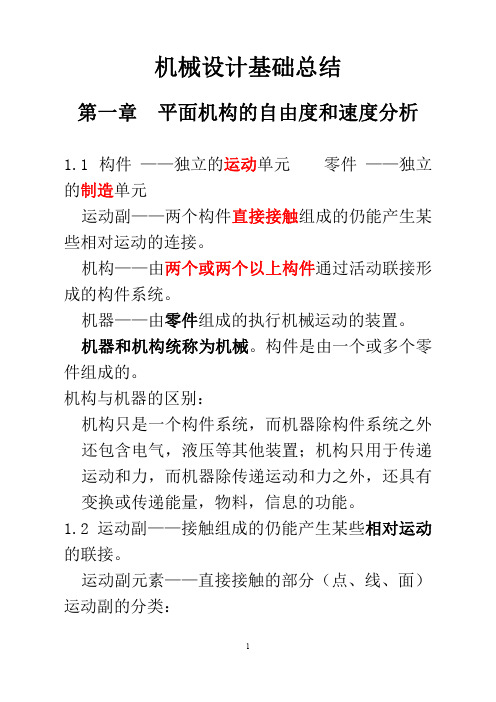
例1–1 图示为颚式碎矿机。当曲轴2绕轴心O1连 续回转,动颚板6绕轴心O3往复摆动,从而将矿
石轧碎。试绘制此碎矿机的机构运动简图。
O3 6
1
O12 A 3
4 DC
O2 5 B
§1–2 平面机构具有确定运动的条件
B A
C D
C
B A
C' D
D'
E
一 平面机构的自由度
1 构件的自由度 2 两构件用运动副联接后,彼 此的相对运动受到某些约束。
2)两构件组成的若干个导路中心线互相平 行或重合的移动副。
x2 B2
A1
C 3
x1
x1 x2 4
n = 3 Pl = 4 F = 3×3–2×4 = 1
2)两构件组成的若干个导路中心线互相平 行或重合的移动副。
n = 3 Pl = 4 F = 3×3–2×4 = 1
3)两构件组成若干个轴线互相重合的转动副。
(桁架)
1 32 4
n = 3 Pl= 5
F = 3×3 – 2×5 = -1 (超静定桁架)
机构自由度 是指机构中各活动构件相对于 机架的可能独立运动数目。
二 平面机构具有确定运动的条件
1)机构自由 度数 F≥1。 2) 原动件数目等于机构自由度数F。
三、计算机构自由度时应注意的几种情况
1) 正确确定运动副的数目 由三个或三个以上构件组成的轴线重
B
A
n = 2 Pl = 2 Ph = 1 F = 3×2–2×2–2×1 = 1
5)机构中对运动不起作用的自由度F=-1 的对称部分存在虚约束。
2
OH
H
1 3
行星传动
n = 4 Pl = 4 Ph = 2 F = 3×4–2×4–2×2 = e2nd
平面连杆机构及其设计习题及答案

04 平面连杆机构及其设计1.在 条件下,曲柄滑块机构具有急回特性。
2.机构中传动角γ和压力角α 之和等于 。
3.在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时, 只能获得 机构。
4.平面连杆机构是由许多刚性构件用 联接而形成的机构。
5.在图示导杆机构中,AB 为主动件时,该机构传动角的值为 。
6.在摆动导杆机构中,导杆摆角ψ£=30o ,其行程速度变化系数K 的值为 。
7.在四杆机构中AB BC CD AD AD ====40406060,,,,为机架,该机构是 。
8.铰链四杆机构具有急回特性时其极位夹角θ值 ,对心曲柄滑块机构的θ值 , 所以它 急回特性,摆动导杆机构 急回特性。
9.对心曲柄滑块机构曲柄长为a ,连杆长为b ,则最小传动角γmin 等于 ,它出现在 位置。
10.在四连杆机构中,能实现急回运动的机构有(1) ,(2) ,(3) 。
11.铰 链 四 杆 机 构 有 曲 柄 的 条 件 是 ,双 摇 杆机 构 存 在 的 条 件是 。
(用 文 字 说 明 )12.图示运动链,当选择 杆为机架时为双曲柄机构;选择 杆为机架时为 双摇杆机构;选择 杆为机架时则为曲柄摇杆机构。
13.在曲柄滑块机构中,若以曲柄为主动件、滑块为从动件,则不会出现“死点位置”,因最小传动角γmin>,最大压力角αmax<;反之,若以滑块为主动件、曲柄为从动件,则在曲柄与连杆两次共线的位置,就是,因为该处γmin=,αmax=。
14.当铰链四杆机构各杆长为:a=50mm,b=60mm,c=70 mm,d=200mm。
则四杆机构就。
15.当四杆机构的压力角α=90︒时,传动角等于,该机构处于位置。
16.在曲柄摇杆机构中,最小传动角发生的位置在。
17.通常压力角α是指间所夹锐角。
18.铰链四杆机构曲柄、连杆、机架能同时共线的条件是。
19.一对心式曲柄滑块机构,若以滑块为机架,则将演化成机构。
第2章平面连杆机构
把铰销B扩大,使其包含A,这时曲柄演化为一几何中心不与回转中 心相重合的圆盘,此盘称为偏心轮,两中心间距称偏心距,等于曲柄之 长,这种机构称为偏心轮机构。 该结构可避免在较短的曲柄两端设两个转动副而引起的结构设计上 的困难, 且盘状构件在强度上比杆状高得多,所以多用于载荷较大或AB较短的 场合。 2、 转动副转化成移动副
例:设计一曲柄摇杆机构,已知摇杆长C及摆角ψ,行程速度变化 系数K。 步骤:①计算 ②按已知条件画C1D、C2D ③连C1C2作∠ C1C2P=90°— ∠ C2C1P=90° ④作C1.C2.P的外接园 ⑤延长C1D、C2D与园交于C1′、C2′ ⑥在或上任取一点即可作A ⑦ AC1=b-a θ。说明此为曲柄与连杆共线的两位置) AC2=b+a 而AD即为机架长度d 由上述知A是可任选的,∴有无数解,若另有其他辅助条件,加给 定d或min或给定a等,则A点便可确定了。 若为曲柄滑块机构:则可由e在园上定A。 若为摆动导杆机构:由 在ψ角平分线上由d→A→B 3、按给定两连架杆对应位置设计(解析法、实验法) 例已知两连架杆AB和CD对应位置 取坐标系如图示,各构件长度在x、y轴上投影,得如下关系式
连杆曲线,用缩放仪求出图谱中的曲线与要求轨迹的相差倍数,将机构 尺寸作相应缩放,从而求得所需的四杆机构尺寸。 这种方法可使设计过程大为简化,适合于工厂和设计单位使用。
几组机构错位安装。 则用死点:例飞机起落架机构 连杆与从动件CD位于一直线上,机构处于死点。机轮着地时产生的 巨大冲击力不致使从动件CD转动,从而保持支撑状态。 又例如机床夹具。见22页图2-6 对其他四杆机构应会用同样方法分析以上四个特性。
§2-4 平面四杆机构的设计
基本问题:按给定的运动条件————确定运动简图的尺寸参数。 给定运动规律(位置、速度、加速度) 已知条件 给定运动轨迹 图解法: 直观 设计方法 解折法: 精确 应根据已知条件和机构具体情况选用 某 实验法: 简便 某种方法 一、按给定的运动规律设计四杆机构 1、按给定的连杆位置设计四杆机构(找圆心法) 已知连杆长度b及两位置B1C1、B2C2,设计该铰链四杆机构(定A、 D点)分析铰链四杆机构ABCD知: B1、B2、B3……应位于园弧k A上 C1、C2、C3……就位于园弧 k c上 作B1B2、B2 B3垂直平分线A C1C2、C2C3垂直平分成D 当给定两个位置时,只能得B1B2、C1C2,分别作其垂直平分线b12、 C12 A点可在b12上任选一点 ∴有无数解 D点可在C12上任选一点 在多解的情况下,可添加一些辅助条件,如满足有曲柄,紧凑的尺 寸,较好的传动角,固定铰链的位置等,从中选取满足附加条件的机 构。(如要求A、D水平) 当给定连杆三个位置时: 作B1B2中垂线 交点为A 作B2 B3中垂线 有唯一解ABCD 作C1C2中垂线 交点为D 作C2C3中垂线 2、按给定的行程速度变化系数K设计(三点共园法)
机械原理-第02章 平面连杆机构及其设计 - 平面连杆机构的力分析
件惯性力对机械性能的影响。
G′
2020年4月23日星期四
5
§2-5 平面连杆机构的力分析
WHUT
3、机构力分析的方法
静力分析和动态静力分析。
由于最初设计时,各构件的结构尺寸、形状、材料、质量及 转动惯量未知,因而惯性力(矩)无法确定。此时,一般先 对机构作静强度计算,初步确定各构件尺寸,然后再对构件 进行动态静力分析及强度计算,并以此为依据对各构件作必 要的修正。一般不考虑摩擦力的影响。
(2) 绕定轴转动的构件
a. 回转轴线通过构件质心
S
Pi = 0 Mi = -Js ε ( ε = 0 或 ε ≠0 ) b. 回转轴线不通过质心
Pi = -mas Mi = - Jsε
其中:h=Mi/Pi
2020年4月23日星期四
WHUT
Pi' Pi
h S
Mεi
8
§2-5 平面连杆机构的力分析
(3) 作平面复合运动的构件
2020年4月23日星期四
21
WHUT
(2) 判定构件间的相对转向
F
R12
R12
ω21
v
1
2
R23ω23
3Q
ω14
4
R41
R32R32
R43
(3) 判定作用力在摩擦圆上切点位置
Q R23
R21
F
R43 R41
(4) 依据力平衡条件求解
对构件3:Q + R23 + R43 = 0 对构件1:R21 + R41+ F = 0
2020年4月23日星期四
3
§2-5 平面连杆机构的力分析
2、机构力分析的任务和目的
《机械设计基础》第2章_平面连杆机构解析
由上式可知,机构的急回程度取决于极位夹
角θ的大小。θ角越大,K值越大,机构的急回程
度也越高,但机构运动的平稳性就越差。反之反 然。 一般机械中1≤K≤2。
5.连杆机构具有急回特性的条件
⑴ 输入件等速整周转动;
⑵ 输出件往复运动;
⑶ 极位夹角
。 0
6.常见具有急回特性的四杆机构
二、平面连杆机构的特点及应用
1.平面连杆机构的特点
⑴寿命长 低副联接,接触表面为平面或圆柱面,
压力小;便于润滑,磨损较小。
⑵易于制造 连杆机构以杆件为主,结构简单。 ⑶可实现远距离操纵控制 因连杆易于作成较长
的构件。
⑷可实现比较复杂的运动规律 ⑸设计计算较繁复,当机构复杂时累计误差较大,
2、双曲柄机构
具有两个曲柄的铰链四杆机构。
⑴平行四边形机构:连杆与机架的长度相等,且曲
柄的转向相同长度也相等的双曲柄机构。 这种机构两曲柄的角速度始终保持相等,且连杆 始终做平动,故应用较广。
运动的不确定性
有辅助构件的重复机构
有辅助构件的错列机构
⑵逆平行四边形机构:连杆与机架的长度相等,两
含有两个移动副的四杆机构应用实例
2.3 平面四杆机构的基本特性
一、铰链四杆机构存在曲柄的条件
设 AB 为曲柄,
由 △BCD :
且 a <d .
b+c>f 、 b+f >c 、 c+f >b
以 fmax = a + d , fmin = d - a b+c >a+d 、 b+d >a+c 、 c+d >a+b 化简后得: a<b 、 a<c 、 a< d 若 d <a d<a、d<b、d<c 代入并整理得:
第二章 平面连杆机构及其设计
搅拌机
抓片机构
输送机
10/49
§2—1 铰链四杆机构的基本型式和特性
2)摇杆为原动件,曲柄为从动件时: 摇杆的往复摆动 曲柄的连续转动。 3 2
如图所示的缝纫机踏板机构。
3 2 1 4 摇杆主动
4 1
缝纫机踏板机构
11/49
§2—1 铰链四杆机构的基本型式和特性
二、双曲柄机构
双曲柄机构:两个连架杆都是曲柄。 传动特点: 主动曲柄连续等速转动时,从动 曲柄一般作变速转动。
冲床机构
如图所示的旋转式水泵和如上图所示的冲床机构。
A
1 D C 3 A B 2 4 D
1 B
2 C 3
旋转式叶片泵
振动筛机构
12/49
§2—1 铰链四杆机构的基本型式和特性
三、双摇杆机构
两个连架杆都是摇杆,则称为双摇杆机构。 其运动特性是:两摇杆都作摆动,但两 摇杆的摆角大小不同。 应用实例: 图2-6所示的工件夹紧机构、图2-11的飞机起落架机 构 ;
优 点:
图c
图d
3/49
2、缺点:
1)低副中存在间隙,会引起运动误差,使效率降低;
2)动平衡较困难,所以一般不宜用于高速传动;
3)设计比较复杂,不易精确地实现复杂的运动规律。
应 用:
连杆机构广泛地应用在各种机械和仪器中。 如雷 达调整机构(图2-3)、缝纫机踏板机构(图2-5) 、 鹤式起重机、机车驱动轮联动机构(图2-10)、牛头刨 床、椭圆仪(图2-22) 、机器人等。
1、在满足杆长条件下,即Lmin+Lmax≤Li+Lj : 1)取Lmin为机架时,机架上有两个整转副,该机构为 双曲柄机构(2个曲柄)。 2)取Lmin为连架杆(即最短杆的邻边为机架)时,机 架上只有一个整转副,该机构为曲柄摇杆机构(1 个曲柄)。 3)取Lmin为连杆(即最短杆的对边为机架)时,机架 上没有整转副,该机构为双摇杆机构(无曲柄)。
华中科技大学《机械设计基础》常考内容总结zy
第一章 平面机构的自由度和速度分析
零件 ——独立
1.1 构件 ——独立的运动单元 的制造单元
运动副——两个构件直接接触组成的仍能产生某 些相对运动的连接。 机构——由两个或两个以上构件通过活动联接形 成的构件系统。 机器——由零件组成的执行机械运动的装置。 机器和机构统称为机械。构件是由一个或多个零 件组成的。 机构与机器的区别: 机构只是一个构件系统,而机器除构件系统之外 还包含电气,液压等其他装置;机构只用于传递 运动和力,而机器除传递运动和力之外,还具有 变换或传递能量,物料,信息的功能。 1.2 运动副——接触组成的仍能产生某些相对运动 的联接。 运动副元素——直接接触的部分(点、线、面) 运动副的分类:
2.1 何谓平面连杆机构?它有何特点?能够实现哪 些运动转换? 平面连杆机构是有若干构件用低副(转动副、移动 副)连接组成的平面机构,又称平面低副机构。 ①采用低副。面接触、承载大、便于润滑、不易 磨损 形状简单、 易加工、 容易获得较高的制造精度。 ②改变杆的相对长度,从动件运动规律不同。 ③连杆曲线丰富。可满足不同要求。
1
1)按引入的约束数分有: I 级副(F=5) 、II 级副(F=4) 、III 级副(F=3) 、 IV 级副(F=2) 、V 级副(F=1) 。 2)按相对运动范围分有: 平面运动副——平面运动 空间运动副——空间运动 平面机构——全部由平面运动副组成的机构。 空间机构——至少含有一个空间运动副的机构 3)按运动副元素分有: 高副( )——点、线接触,应力高;低副( ) ——面接触,应力低 1.3 机构:具有确定运动的运动链称为机构 机构的组成:机构=机架+原动件+从动件 保证机构具有确定运动时所必须给定的独立运动 参数称为机构的自由度。 24y 原动件<自由度数目:不具有确定的相对运动。原 动件>自由度数目:机构中最弱的构件将损坏。 1.5 局部自由度:构件局部运动所产生的自由度。 出现在加装滚子的场合,计算时应去掉 Fp。 复合铰链——两个以上的构件在同一处以转动副 相联。m 个构件, 有 m-1 转动副
第2章 平面连杆机构02——自由度
性桁架,因而不能成为机构。
5)超静定桁架
n=3 PL=5 PH=0 F=3n-2PL-PH=3×3-2×5-0=-1 表明该运动链由于约束过多,已成为超静定桁架 了,也不能成为机构。
计算实例 实例1: 解:n = 3, PL = 4, PH = 0 F = 3n - 2PL - PH =3×3 - 2×4 - 0
3ቤተ መጻሕፍቲ ባይዱ
2 1 4
n=3 PL=4 PH=0
F=3n-2PL-PH=3×3-2×4-0=1 2)五杆机构: n=4 PL=5 PH=0 F=3n-2PL-PH=3×4-2×5-0=2 3)凸轮机构: n=2 PL=2 PH=1 F=3n-2PL-PH=1
4 3
2
1 5
4)刚性桁架
n=2 PL=3 PH=0 F=3n-2PL-PH=3×2-2×3-0=0 表明该运动链中各构件间已无相对运动,只构成了一个刚
2、约束
但当这些构件之间以一定的方式联接起来成为构件系 统时,各个构件不再是自由构件。——自由度减少。
这种对构件独立运动所施加的限制称为约束。
3、自由度和约束的关系 运动副每引入一个约束,构件就失去一个自由度。 运动副既限制了两构件的某些相对运动,又允许构件 间有一定的相对运动。
二、平面机构的自由度计算
惯性筛机构
F=3n-2PL-PH
=3×5-2×7-0
=1
2.局部自由度
个别构件所具有的,不影响整个机构运动的自由度称为 局部自由度。 典型例子:滚子的转动自由度并不影响整个机构的运 动,属局部自由度。 计入局部自由度时 n = 3, PL = 3, PH = 1 F =3×3 - 2×3- 1 =2 与实际不符
=1
实例2: n =5, PL = 7, PH = 0 解: F = 3n – 2PL – PH = 3×5 – 2×7 – 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
B
A
C
B1
B2 C1
B C1
Aθ
B2
B1
C2 C C2
曲柄滑块机构
导杆机构
A θ
B2
B1 C
=
D
三、平面机构的压力角 和传动角、死点
BF2 CγFra bibliotekFα
δ F1
vc
A
D F1 = Fcosα
F2 = Fsinα
1、机构压力角:在不计摩擦力、惯性力和重力的条 件下,机构中驱使输出件运动的力的方向线与输出 件上受力点的速度方向间所夹的锐角,称为机构压 力角,通常用α表示。
a
c
A
d D
把三组对应角位置
x
R1 R2 cos R3 cos
R1
a2
c2 d 2ac
2
b2
cos( )
1,1;2, 2;3, 3
带入,可得关于
R2
d c
, R3
d a
R1, R2 , R3 的三元一次方程组
连杆
在连架杆中,能
连架杆 1
2 3
4 机架
绕其轴线回转360° 连架杆 者称为曲柄;仅能
绕其轴线往复摆动
者称为摇杆。
1)曲柄摇杆机构:两连架杆中,一个为曲柄, 而另一个为摇杆。 2)双曲柄机构 两连架杆均为曲柄。 3)双摇杆机构 两连架杆均为摇杆。
二 平面四杆机构的演变
1 转动副转化为移动副
C 2
多边形条件:最长杆的杆长<其余三杆长度之和。
曲柄滑块机构有曲柄的条件
1)a为最短杆
B
2) a+e≤b.
a
b
C”
C C’
B’’
e
A B’
导杆机构有曲柄的条件
a A
d
C
摆动导杆机构 B
1)a为最短杆,a+ed
导杆机构有曲柄的条件
aB A
d
C
偏心曲柄滑块机构
转动导杆机构 2)d为最短杆,且满足d+ea
(颚式碎矿机、惯性筛) B0
B3
2
2)根据给定的运动轨迹设计四杆机构;
…
•…
3) 综合功能
实现连杆位置; 实现轨迹; 实现速度要求
2、设计方法 1)实验法 2)几何法 3)解析法
一 根据给定的连杆位置设计四杆机构
b12 B1
A
C1 c12 C2 c23
B2 b23
C3
B3
D
一 根据给定的连杆位置设计四杆机构
二、平面四杆机构输出件的急回特性
C1
C
C2
B
θ极位夹角ψ 摆角
1
B2
A
D
B1
2
二、平面四杆机构输出件的急回特性
C1
C
C2
B
1
B1
θ极位夹角ψ 摆角 v1 =C⌒1C2/t1
B2
A
D
v2 =C⌒1C2/t2
2
1=180°+θ, 2=180°-θ
∵: 1>2 , ∴: t1>t2 , v1<v2
行程速比系数 输出件空回行程的平均速度
B
1
A
3
3C
2
DB
1
A
D
B
2
A1
C3
对心曲柄滑块机构
B2 A1
偏心曲柄滑块机构
C3
2
B
1
A
C
3
B
1
A
s
2C
3
s lAB sin
2 取不同构件为机架(机构倒置)
曲柄滑块机构 导杆机构
2 取不同构件为机架(机构倒置)
曲柄摇块机构
直动滑杆机构
3 扩大转动副
B
C
A
C2
C1
B
C
A
§2-2 平面四杆机构设计中的共性问题
a≤b
从而可得
a≤c a≤d
(2) 若d≤a 则可得
dd
a b
b a
c c
d c a b
(b c) (c b)
dd
a b
d c
平面连杆机构有曲柄的条件: 1)连架杆与机架中必有一杆为四杆机构中的最 短杆;
2)最短杆与最长杆之和应小于或等于其余两杆
的杆长之和。(杆长和条件)
铰链四杆机构类型的判断条件: 1)在满足杆长和的条件下:
A
A 1 BvB3 α
2F 3
C
2、最小传动角的确定
Vc F2
γ= δ
或γ = 180- δ
B
C’’
F
γγbδ c
Cγ F1 C’
F vc
B’’
a A
δδmax d B’
δmin D
2、最小传动角的确定
γmin=[δmin ,180 -δmax]min δ= arccos{[b2+c2-d2-a2+2adcos]/2bc}. = 0, δmin= arccos{[b2+c2-(d-a)2]/2bc} = 180, δmax= arccos{[b2+c2-(d+a)2]/2bc}
传动角:压力角的余角。 通常用γ表示. B
A
F2 C
γ
F
δ
α
F1
vc
D
机构的传动角和压力角作出如下规定: γmin≥[γ ];[γ]= 3060°; αmax≤[α]。 [γ]、[α]分别为许用传动角和许用压力角。
A1 B 2 F vB3
3 α= 0° C γ= 90°
C
2 B
3α
F
1 vB3
一、平面四杆机构有曲柄的条件 二、平面四杆机构输出件的急回特性 三、平面机构的压力角和传动角、死点 四、运动的连续性
一、平面四杆机构有曲柄的条件
B2
E B1 C
B 1a
2C bc 3
F
A E’ F’ D b+c
G’
|b-c|
d
A 4D
G
|d-a|
d+a
三角形两边之差小 于第三边
|d-a|≥|b-c|
二 按给定行程速度变化系数设计四杆机构
A B1
C1
C2
90- 90-
B2 O D
已知:lCD , , K(>1)
求:A的位置, 并定出
lAB , lAD , lBC
二 按给定行程速度变化系数设计四杆机构
C1
C2
确定比例尺 l
180°(K-1)
90- 90-
θ= (K+1)
A
B2
O
B1
D
AC1=BC-AB AC2=BC+AB AB=(AC2-AC1)/2
(1)以最短杆的相邻构件为机架,则最短杆为曲柄,另 一连架杆为摇杆,即该机构为曲柄摇杆机构; (2)以最短杆为机架,则两连架杆为曲柄,该机构为双 曲柄机构; (3)以最短杆的对边构件为机架,均无曲柄存在,即该 机构为双摇杆机构。
2)若不满足杆长和条件,该机构只能是双摇杆机构。
注意:铰链四杆机构必须满足四构件组成的封闭
第二章
平面连杆机构及其设计
一、 连杆机构
若干个构件全用低副 联接而成的机构,也 称之为低副机构。
二、连杆机构的分类
1、根据构件之间的相对运动分为:
平面连杆机构,空间连杆机构。 2、根据机构中构件数目分为:
曲柄滑块机 构待定
四杆机构、五杆机构、六杆机构等。
三、平面连杆机构的特点
1)适用于传递较大的动力,常用于动力机械。 2)依靠运动副元素的几何形面保持构件间的相互
B’’ B
eA a
B’
B’’ B
A
C’’ C
min C’
B’
b ’’
C’ C’’ ’
C min= ’=arccos(a+e)/b
为提高机械传动效率,应使其最小传 动角处于工作阻力较小的空回行程中。
3 机构的死点位置
BF
A α
v
F Bα Av
C
F1 = Fcosα F2 = Fsinα
C
D
D
在不计构件的重力、惯性力和运动副中的摩擦阻力 的条件下,当机构处于传动角γ=0°(α=90°)的位 置下,无论给机构主动件的驱动力或驱动力矩有多大, 均不能使机构运动,这个位置称为机构的死点位置。
e
A
B1
B C1 θ B2 900-
C C2
900-
o
三 根据给定两连架杆的位置
设计四杆机构
1、 刚化反转法
C1
Ci
B1 1i Bi
A
1
B’i
1i
1i
1 D
A’
三 根据给定两连架杆的位置
设计四杆机构
1、 刚化反转法
C1
Ci
如果把机构的第i B1 个位置ABiCiD看成一刚
1i Bi
体(即刚化),并绕点D 转过(-1i)角度(即反 A
BC=(AC1+AC2)/2
lAB AB • l ,
lBC BC • l ,
lAD AD • l
Aθ
B2
B1 C
导杆机构 已知:lAD , K
=
lAB lAD sin 2 lAD sin 2
D
lBD lAD cos 2 lAD cos 2
曲柄滑块机构
已知:C1 、C2位 置(行程H),K
K = —输—出—件—工—作—行—程—的—平—均—速—度—
= v2/v1 =(C1C2/t2)/ (C1C2/t1 ) = t1/t2 =1/2 =(180°+θ)/(180°-θ)