果蔬采摘机器人技术研究进展和分析_周天娟
蔬果采摘机器人的研究进展与展望
蔬果采摘机器人的研究进展与展望随着人工智能和机器人技术的飞速发展,人类社会的各个领域都在逐步实现自动化和智能化,农业这一传统领域也不例外。
在农业生产中,蔬果采摘一直是一项繁重的体力劳动,而且也存在着人力成本高、劳动力短缺等问题。
研发蔬果采摘机器人成为了农业科技领域的热点之一。
本文将就蔬果采摘机器人的研究进展与展望进行探讨。
目前,蔬果采摘机器人的研究已经取得了一定的进展,主要体现在以下几个方面:1. 机械结构的改进蔬果采摘机器人的机械结构是实现自动采摘的基础,目前的研究主要集中在采摘机械手的设计和改进上。
其目的是通过对机械手的结构、材料等方面的优化,提高机器人在蔬果采摘过程中的精准度和效率。
2. 视觉识别技术的应用蔬果采摘机器人需要具备识别蔬果、判断成熟度等能力才能完成采摘任务。
视觉识别技术在机器人的研究中扮演着重要的角色。
研究人员利用计算机视觉技术和人工智能算法,使机器人能够对蔬果进行准确的识别和判断,从而实现自动采摘。
3. 机器人智能化控制系统的研发机器人的智能化控制系统是保证机器人正常运行和顺利完成采摘任务的核心。
研究人员通过对传感器、控制算法等方面的改进,不断提高机器人在蔬果采摘过程中的适应能力和采摘效率。
二、蔬果采摘机器人的展望1. 提高农业生产效率随着人口的增加和工业化的发展,对农产品的需求量不断增加。
蔬果采摘机器人的研发和应用可以大大提高农业生产效率,满足不断增长的市场需求。
2. 缓解劳动力短缺问题目前,蔬果采摘工作主要依靠人工完成,但是随着城市化进程的加快,农村劳动力短缺的问题日益突出。
蔬果采摘机器人的应用将能够缓解这一问题,减轻农民的劳动负担。
3. 优化农业生产结构传统的蔬果采摘方式通常需要大量的人力投入,而且采摘效率低下,影响了农业生产的整体效益。
蔬果采摘机器人的应用将可以使农业生产更加智能化,为农业生产结构的优化提供技术支持。
4. 推动农业现代化发展蔬果采摘机器人的研发和应用是农业现代化发展的必然趋势。
果蔬采摘机器人研究进展
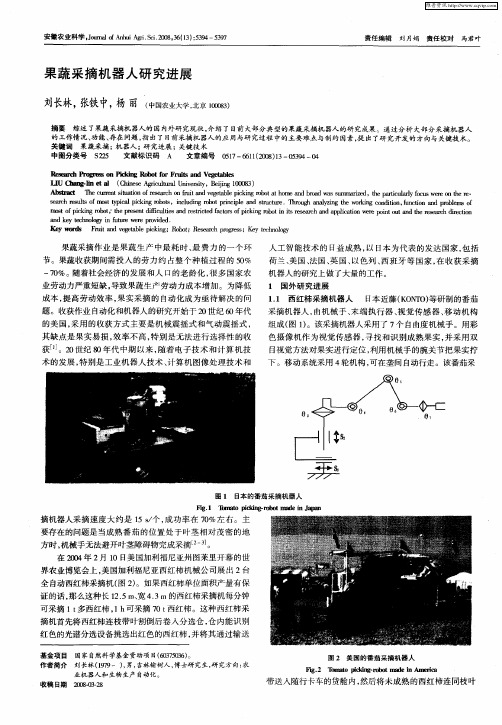
图 1 日本 的番 茄 采摘 机 器 人 rg1 Tma i rb tl r nJpn i. o t p o 曲 0o lml aa t ei
摘机器人采 摘 速度 大约 是 1 / , 5s个 成功 率在 7 %左 右 。主 , 0
要存在 的问题 是当成 熟 番茄 的位 置处 于 叶茎 相对 茂密 的地 方时 , 械手无法避 开叶茎障碍物 完成采摘 _ 3。 机 2J -
,
s rhrsl f i ty i l i i bt,icuigrbt r c l ads utr. Iu aaymgt ok gcnio , ntnadpo l f e c ut o t pc c n r o nldn oo pi ie n t c e 皿l 曲  ̄ l ewri odt n f ci n rb ms a e s n ̄ t a p k g o s np r u D z h n i u o e o
Ab ta t Th u rn i aino sac nfut n e ea l ikn o o t o n ra w ssn a ie te p riu a l o u e e o h ℃. src ec re tst t f ee rho r ia dvg tbepc igrb t mea d bod a u m,rzd h a t lryfc sw r nt eI u o r ah c
目视觉 方法对果实进行 定位 , 利用机械 手 的腕关 节把果实 拧 下 。移 动系统采用 4轮机构 , 可在垄 间 自动行走 。该 番茄采
其 缺点是 果 实易 损 , 率不 高 , 效 特别 是无 法进行 选择 性 的收
获u 。2 世 纪 8 0 J 0年代 中期 以来 , 随着 电子 技术 和 计算 机 技 术 的发展 , 别是 工业 机器 人技术 、 算机 学 。 ma A hi g .c. O 。 (3 :34— 37 J a 0 nu A r Si O83 1)59 59  ̄ lf i 2 6
果蔬采摘机器人研究进展与展望

果蔬采摘机器人研究进展与展望金慧迪(西北农林科技大学,机械与电子工程学院,712100)摘要:本文主要介绍了果树采摘机器人的特点及国内和美国、日本、荷兰、英国等国外的研究进展,并且对研究过程中所存在的一些问题提出了一系列的解决方案,对未来果蔬机器人的发展进行了展望。
关键词:机器人:果树采摘:研究进展在果蔬生产作业中,收获采摘约占整个作业量的40%。
采摘作业质量的好坏直接影响到果蔬的储存、加工和销售,从而最终影响市场价格和经济效益。
由于采摘作业的复杂性,采摘自动化程度仍然很低。
目前国内果蔬采摘作业基本上还是手工完成。
随着人口的老龄化和农业劳动力的减少,农业生产成本也将提高。
因此,发展机械化收获技术,研究开发果蔬采摘机器人,具有重要的意义。
一、果蔬采摘机器人的特点1.1 作业对象的非结构性和不确定性果实的生长是随着时间和空间而变化的,生长的环境是变化的、未知的和开放性的,直接受土地、季节和天气等自然条件的影响。
这就要求果蔬采摘机器人不仅要具有与生物体柔性相对应的处理功能,而且还要能够顺应变化无常的自然环境,在视觉、知识推理和判断等方面具有相当高的智能。
1.2 作业对象的娇嫩性和复杂性果实具有软弱易伤的特性,必须细心轻柔地对待和处理。
且其形状复杂,生长发育程度不一,相互差异很大。
果蔬采摘机器人一般是作业、移动同时进行,行走不是连接出发点和终点的最短距离,而是具有狭窄的范围、较长的距离及遍及整个田间表面等特点。
1.3 良好的通用性和可编程性由于果蔬采摘机器人的操作对象具有多样性和可变性,要求具有良好的通用性和可编程性。
只要改变部分软、硬件,变更判断基准,变更动作顺序,就能进行多种作业。
例如,温室果蔬采摘机器人,更换不同的末端执行器就能完成施肥、喷药和采摘等作业。
1.4 操作对象和价格的特殊性果蔬采摘机器人操作者是农民,不是具有机电知识的工程师,因此要求果蔬采摘机器人必须具有高可靠性和操作简单的特点;另外,农业生产以个体经营为主,如果价格太高,就很难普及。
蔬果采摘机器人的研究进展与展望

蔬果采摘机器人的研究进展与展望
目前,国内外蔬果采摘机器人技术研究主要聚焦于以下方向:
一、机器人智能控制系统的研究
机器人智能控制系统是蔬果采摘机器人研究中最重要的方向之一。
实现高精度和高效率的蔬果采摘任务需要机器人拥有强大的智能控制系统,能够根据不同蔬果的成熟度、大小、形态等因素,自主选择采摘动作,确保采摘成功率和采摘速度。
二、机器人机械臂的结构设计
机器人机械臂是蔬果采摘机器人的核心部件,其结构设计的合理性对机器人的采摘效率和精度有着决定性的影响。
机械臂的关键技术包括精度控制、力量控制、柔性控制等方面的研究。
其中精度控制是机器人机械臂设计中最为重要的技术之一,它涉及到机器人在采摘时对于蔬果的位置和方向的识别和控制。
三、机器视觉技术的应用研究
机器视觉技术是蔬果采摘机器人研究中的一种重要技术。
机器视觉技术可以实现对蔬果的识别和定位,为机器人的操作提供精准的指导,提高采摘的效率和精度。
目前国内外研究者的研究成果表明,利用深度学习技术可以实现对蔬果的高效、准确的识别和定位。
机器人移动控制技术主要用于机器人在野外的移动控制,它的研究对于机器人的采摘任务有着至关重要的作用。
目前研究者们主要利用全局导航和局部避障的技术,完成机器人的移动控制和路径规划。
总之,蔬果采摘机器人的研究正处于高速发展阶段。
未来,随着农业机器人智能化和机器人应用范围的不断拓展,蔬果采摘机器人将成为农业生产的重要力量之一,其技术发展前景十分广阔。
农业果树采摘机器人功能实现及试验研究

农业果树采摘机器人功能实现及试验研究随着科技的不断发展,人工智能和机器人技术的应用已经渗透到各个领域。
在农业领域,果树采摘一直是一项繁重而耗时的任务,因此研发一种能够自动采摘果实的机器人成为了人们的需求。
本文将介绍农业果树采摘机器人的功能实现及试验研究。
农业果树采摘机器人的功能实现主要包括以下几个方面:1. 视觉识别:机器人需要具备识别果实的能力,可以通过摄像头和图像识别技术来实现对果实的识别和定位。
2. 机械臂操作:机器人需要配备灵活的机械臂,能够准确地定位和采摘果实,同时能够适应不同形状和大小的果实。
3. 自动导航:机器人需要具备自动导航的能力,能够在果园中自主行走,并找到需要采摘的果树。
4. 数据记录和分析:机器人需要记录采摘的果实数量和质量数据,可以通过传感器和数据处理技术来实现数据的记录和分析。
以上功能的实现需要依赖于人工智能技术和机器人控制技术的发展,是一项综合性较强的工程问题。
在实际研发过程中,需要充分考虑果实的特点和果树采摘的实际操作场景,确保机器人能够在不同的环境下稳定运行和准确采摘果实。
针对农业果树采摘机器人的功能实现,一些研究机构和企业已经进行了试验研究。
他们通过对机器人的设计和优化,以及对果树采摘过程的分析和实验验证,取得了一些初步的成果。
以下是一些典型的试验研究案例:1. 中国农业大学团队在柑橘采摘机器人方面的研究中,通过对柑橘的特征和果实生长规律进行深入研究,结合视觉识别和机械臂操作技术,实现了柑橘的自动采摘。
他们利用机器学习算法对柑橘的外观特征进行识别,再通过机械臂精准地采摘果实,取得了较好的效果。
2. 日本岩手大学的研究团队开发了一种适用于苹果采摘的机器人。
他们利用高精度的摄像头和三维感知技术,能够在苹果树上准确识别并定位果实,然后通过先进的机械臂技术进行采摘。
他们进行了大量的实地测试,并取得了令人满意的结果。
3. 美国加州大学伯克利分校的研究团队开发了一种可机器人在葡萄园中自主行走并采摘葡萄的系统。
果蔬采摘机器人研究进展详细介绍
果蔬采摘机器人研究进展详细介绍鲜果自动化采摘机器人,是先进工业技术和装备在农业生产环境进行创新应用的经典案例,在基础理论研究和技术集成应用方面的研究成果,将对现代农业生产的节约高效发展具有重要影响。
4.2.1研究背景意义随着全球人口老龄化和城镇化进程的不断深入,农业人口流失、人力成本上涨与农产品生产供给需求之间的矛盾,已成为当前农业生产可持续发展面临的重要问题。
研发能够代替人类作业的高效率、高质量、低成本的自动化作业机械,是从工程技术角度应对当前形势的重要手段[72]。
由于鲜食果蔬需要具备良好的外观和口感,采收过程中需要对每个果实进行成熟度判断和精准采摘操作,依靠人工采摘劳动强度大、生产成本高,以草莓为例人工采收成本占总生产成本25%以上[73]。
因此从鲜食果蔬采收这一劳动密集型环节着手,研究自动化作业生产方式和装备,对于果蔬产品的安全供应和产业可持续发展具有重要意义。
4.2.2国内外研究现状目前日本、荷兰和美国等发达国家研究的针对番茄、黄瓜以及苹果采摘的机器人处于国际领先地位[74-77],其果实目标定位误差小于10mm,识别准确率85%以上,不同对象条件下每工作循环为10~50s。
其中日本的研究成果最多,而且主要集中在20世纪90年代初到21世纪初,主要由东京大学、冈山大学等单位主导。
日本农业机器人具有如下特点:(1)农业机器人本体类似于工业机器人,结构紧凑;有的直接采用了工业机器人机械臂本体(2)智能化程度高,自由度较多,灵活度高;(3)采用的机器视觉技术比较先进。
其典型代表的是冈山大学的西红柿采摘机器人,采用了7自由度工业机械手,彩色摄像机视觉技术,具有避障能力,较为先进。
但实用性不高,到目前为止都没有实现商业化,主要是因为运行速度低、采摘成功率低和成本高,而目前最接近商业化的可能是冈山大学的Kondo N等人研制的草莓采摘机器人,从该机器人从1999年至今一直在不断改进。
该草莓机器人采用履带导轨式导航,适合在温室或者大棚条件下规范化种植的情况。
农业果树采摘机器人功能实现及试验研究
农业果树采摘机器人功能实现及试验研究【摘要】本文以农业果树采摘机器人为研究对象,探讨了其功能实现及试验研究。
在介绍了研究的背景和意义,明确了研究目的。
在详细阐述了果树采摘机器人的设计与实现,机器人采摘算法优化研究,机器人在果园中的试验与验证,机器人采摘效果与成本分析,以及机器人在农业果园中的应用前景。
最后在结论部分总结了农业果树采摘机器人的功能实现与研究成果,并展望了未来的发展方向和研究成果的应用推广。
通过本文的研究,有望为农业果树采摘机器人的发展提供可靠的理论和实践基础,推动农业生产的智能化和现代化进程。
【关键词】农业果树采摘机器人, 功能实现, 试验研究, 设计与实现, 采摘算法优化, 试验与验证, 采摘效果, 成本分析, 应用前景, 研究成果, 发展展望, 应用推广.1. 引言1.1 背景介绍随着人们对健康生活方式的追求和对农产品质量安全的关注不断增加,果树采摘机器人的研究和应用也变得更加重要。
通过引入先进的机器视觉识别技术和智能算法,果树采摘机器人可以更精准地识别和采摘果实,大大提升果园管理的效率和质量。
研究农业果树采摘机器人的功能实现及试验研究具有重要意义,可以推动农业生产方式向智能化、高效化方向发展,同时也有望提升果园的经济效益和竞争力。
1.2 研究意义果树采摘是农业生产的一项重要任务,传统的果树采摘工作耗时耗力且效率低下,而且难以满足大规模种植的果园需求。
开发一种高效、智能的果树采摘机器人具有重要的研究意义和实际应用价值。
果树采摘机器人可以解决人工采摘劳动力不足的问题。
随着城市化进程加速和农村劳动力外流,农业生产面临着来自劳动力资源的严重压力,而采摘机器人的引入可以有效缓解这一问题。
采摘机器人可以提高果园的生产效率和质量。
机器人采摘不受时间和气候限制,可以24小时连续工作,快速、准确地完成采摘任务,避免了采摘中人为操作误差导致的果品损伤,提高了果园的产量和果品品质。
果树采摘机器人还可以减少农药残留和环境污染,提高果园的生态环境和可持续发展水平。
农业果树采摘机器人功能实现及试验研究

农业果树采摘机器人功能实现及试验研究随着农业科技的不断发展,农业生产方式也在不断更新,其中农业机器人的应用成为农业现代化的重要标志之一。
作为农业生产的重要组成部分,果树采摘也在不断追求高效、智能化的生产方式。
本文将重点介绍农业果树采摘机器人的功能实现及试验研究。
果树采摘机器人是一种能够模拟人手进行果实采摘的智能机器人。
它主要包括机械臂、视觉识别系统、定位系统、智能控制系统等组成部分。
首先是机械臂,果树采摘机器人的机械臂通常采用多关节自由度设计,具有较好的灵活性和适应性。
机械臂的设计需要考虑到果树不同高度和角度的果实采摘需求,因此需要具备较大的活动范围和精准的定位能力。
其次是视觉识别系统,该系统通过安装在机器人上的摄像头实时捕捉果树上的果实信息,并通过图像处理技术识别出果实的位置、大小、成熟度等信息,为机械臂的准确定位提供数据支持。
定位系统是为了确保机械臂能够准确地抓取到果实而设计的。
通常采用的是全球定位系统(GPS)和惯性导航系统(INS)相结合的定位技术,保证机器人在果树间的精准移动。
最后是智能控制系统,该系统将视觉识别系统和定位系统获取的数据进行综合分析,实现对机械臂的精确定位和操作控制。
该系统还能够实现对整个机器人的自主运行和避障功能。
试验研究为了验证农业果树采摘机器人的功能和性能,我们进行了一系列的试验研究。
首先是对果树采摘机器人的机械臂进行了精度测试,结果显示机械臂能够在不同高度和角度下准确抓取果实,实现了高精度作业。
其次是对视觉识别系统进行了果实识别和定位测试,实验结果表明视觉识别系统能够准确识别果树上的果实信息,并为机械臂的准确定位提供了有效的支持。
然后是对定位系统的定位精度进行了测试,通过与地面标志物的对照测量,实验结果显示定位系统的精度能够满足果树采摘作业的需求。
最后是对智能控制系统进行了全面的功能测试,包括自主运行、避障、抓取操作等方面,实验结果表明智能控制系统能够实现对整个机器人的智能化控制和协调作业。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
口 平 移接 近 固 定 刃 口
。
,
用 化 和 商 品 化还 有 一 定 的距 离
人 工成 本 高
素
器
,
。
利 用 这 种 方法 在 一 副无 论 是接 近 成 熟 或成 熟 的 还 是
! 年第 一 台 番 茄 采 摘 机
未成 熟 的 西 红柿 图像 里 象 里 识别 出 来
。
都 能 很快 地 将 西 红 柿 从 背 景 图
。
人 在 美 国诞 生 以 来
采 摘 机器 人 的研
多 年 不 过 由于
造 成 抓 取 失 败 或 损 伤蘑 菇
, 。
识 别 黄瓜
。
,
。
其 末端 执 行 器 上 装 有 果 梗 探 测 器 切 割 器 和 机
,
、
防止 因 对 不 准
、
械 手 指 采 摘 时 由机 械 手指 抓住 黄 瓜 后 果 梗 探 测 器 寻 找
果 梗 然后 切 割 器切 断 果梗 机 器人 采 用 基 于
,
姬 长 英 等 在 番 茄 采 摘 中运
,
用 双 目 立 体 视觉 技 术 对 红 色 番 茄 进 行定 位
, ,
将 图像 进行
、
照 相 机 获 取 草 毒 的 图像 计 算 出草 毒 中心 的 方 向 用 激 光 传
灰 度 变 换 而 后 对 图 像 的 二 维 直 方 图 进 行腐 蚀 膨 胀 以 去
每采 摘
个 线性 滑 动 自 由 度 采摘 成 功 率 约 采用
。
。
个 比 手工快
,
倍
。
。
日 本 开 发 的 黄 瓜采 摘 机 器 人
,
自 由 度 的机 械 黄 瓜 果 实垂 在
吉林 工 业 大 学 的 周 云 山 和 李 强 等 视 觉 技 术在 蘑 菇采 摘机 器 人 上 的 应 用
研 究 了机 器
, 。
,
端执 行器 也 会将 目标 果 实附 近 的 未 成 熟 果 实一 起 收 获 隙 的跨 垄 作 业
自由 度 的 草 蓦 采摘 机器 人 采 用 两 个
,
, ,
。
但 这种 机 器 人 的 反 应 较慢 动 作 笨 拙 未 能 形 成 产 品 南京 农 业 大 学 的 张 瑞合
, 、
上 海 交 通 大学 与 日 本 宫崎 大学 共 同 设计 研 制 了 高 地
感 器 测 量手爪 到草 葛 的距 离 采 用 两 个 直 的手 指 来 抓 取草
, 。
除 小 团 块 提 取 背 景 区 边 缘 然 后 用 拟 合 曲线 实现 彩 色 图 蓦 果 柄 避 免 了对 果 实 的 伤害
但对 于 草 墓 的 成 熟度 多 个
。
、
像 的 分割
,
,
将 番 茄从 背 景 中 分 离 出 来
通过 彩 色
。 ,
传 感 系 统获 取 彩 色 图 像 经
,
柑橘 采 摘 机 器 人
西 班牙 研 制 了 柑 橘 采 摘 机 器人 由 摘 果 手 彩 色 视 觉 系 统 和 超 声 传感 定 位器
、
过 图 像 处 理 进 行 目标 草幕 的 识别 和 定 位
进 而 控 制末 端
、 、
,
、
执 行器进 行 收 获
。
近 目标
。
别成 熟果 实
为 了 不 损伤果 实 末 端 执
,
,
日本 的 羽 藤 构建 了 关 于 草 葛果 实 生 长 日 常 变 化 的 数
行 器是 带有 软 衬 垫 的 吸 引 器
, ,
中 间有 个 车轮
,
据库
。
数 据库 包 括 花 白色 未 成熟 果 实 绿 色 未成 熟果 实
, , ,
,
,
,
日本京 都 大 学 的 川 村等
,
,
摄 像 机 检 测 目标果
。
人 开 始 了对 番 茄采 摘 机 器 人 的研 究 并 研 制 出 一 台 具有 械 手 的机 器 人
由 度 机器 人
、
实 然 后 末 端 执行 器 通 过 真 空 装 置 来 吸 入 果 实
果 来看
, ,
从试 验 结
,
自 由 度 关节 型 机
以 通 过 控制 真 空 吸 力 的 强 度
, 。
番 茄 传 统 栽 培 系 统 研究 出 了 一 台
。
、
不 过 一些 未
,
,
该 机 器人 由机械 手 末 端
要解 决 这个 问 题 可
执 行 器 视 觉 传 感 器 移 动 机 构和 控 制
部 分组 成
,
同 时 结 合 植 物形 态 学来 接
用 彩 色 摄像 机来 寻 找 和 识
、
这 种 方 法也 同 样 适 用 于 果 实 与 其 背 景 有
究 和开 发 已 经历 了
,
。
明显 不 同颜 色 特 征 的 图 像 草毒 采摘 机 器人
采摘 对 象 的 复 杂 性 和 工 作 环境 的 随 机
国 工 娟 周 口 大 业 院 铁 农 张 天 中 学 中 性 目 前 市 场 上 仍 没 有成 熟 的 商 品 化 的 采 摘机 器 人 出 现
器人 该 机 器人 包 括 台彩 色
, 。
,
。
该番 茄采摘 机器人 从 识 别 到 采 摘
个 成 功 率在
,
日 本 的 有 马 等 研 究 了 平 面栽 培 模 式 下 的 草 葛 采 摘 机
完 成的速 度大 约是
左右
,
。
自由 度 机 械手 气动 的末 端 执行器
,
,
韩 国 农 业机 械 化 研 究所 也 在 进 行 番 茄采 摘 机 器 人 的
手 能 在 倾 斜棚 支 架 下 工 作 这 种 支架 栽 培 方式 是 为 利 于 机 械化 采摘 而 在 传 统 栽 培 方 式 下 改 良 的
,
该 系 统 主 要 由蘑
、
菇 传 送带 摄 像 机 采 摘机 械 手
、
、
、
自 由度 气 动 伺 服 机 构
。
、
倾 斜 棚 的 下 侧 便 于 黄 瓜 与 茎 叶 分 离 使 检 测 与 采摘 更 容
。
采摘
上 水 果 识 别 方 法 并 用 于 树 上 柑 橘 进 行 了 试验
。
安装 在行 走 自 由度 机械
、
蘑菇 采 摘 机 器 人
英 国西 尔 索 研 究 所 开 发 的采 蘑 菇 机 器 人 装 有 录 像 机 红 外线 测 距 仪 和 视觉 分析 软 件 能 首 先 确 定 哪 些 蘑 菇
该 研究 在荷 兰 的 温 室 里进 行 黄 瓜 按 照 标 准 的
,
方法
。
分 别 提 出 了基 于 彩色 信 息 和 红 外 热 成 像 技 术 的 树
,
园 艺 技 术 种 植 并 培 养 为 高拉 线 缠 绕 方式 吊挂 生 长 用 的 末 端 执行 器 由机 械 手爪 和 切 割 器 构 成
,
。
对 目标 进 行标 定
,
草 墓 遮 挡 以 及 生 产实 际应 用 等情况 尚未进 行 研 究
后 用 面 积 匹 配 实现 共 扼 图像 中 目标 的 配 准 运 用 体 视成
洲
中 国农 业 大学 的 张 铁 中 等人 针 对 我 国 常 见 的 温 室 里
下
专题综 述
垄 作 栽 培 的 草墓 设 计 了
可 以 采摘 以 及 属 于 哪 种 等 级 然 后 测 出 其 高 度 以 便 采摘 它 每 分钟 能 摘 蘑 菇
,
车上
。
,
,
行 走 车为 机 械手 的 操 作 和 采 摘 系 统 的初 步 定 位 服
务 机械 手有 为
,
个 自由 度 采 用 三 菱
条 黄瓜 需 时
, , 。
,
一
,
,
手 在 底 座 上 增加 了
、
,
当 目标 与 摄 像 机 的 距 离 为
一
、 。
摘 输 送 装 箱 等 相 关作 业 任 务 的具 有
时 深 度 误差 可 控 制 在 江 苏 大学 机 械 工 程 学 院 的 陈 树 人
感知 能 力 的 自动 化 机 械 收 获 系 统 是识 别 和 定 位果 实
,
。
设
。
尹建 军 等 提 出 了
。
近 藤 等 人 研制 出气 吸 式 草 毒 采 摘机 器 人
,
针对 特 定 种草
栽 培模 式
番 茄 采 摘 机器 人
— 葛 采 摘机 器 人 并 分 别 进行 了 试 验
机 械 手结 构 相 似 的 是 通 过 彩色
,
坡 面上 种植 和 平 面种 植
。
,
研 制 出了
这 些 机 器 人有 不 同的
年
种 采 摘机 器人
。
分 别 采 用 桥架
,
过 对 果 实 叶 枝 等 的 色 泽信 号 浓 度 频 率 谱 图 的 分 析 求 出 阂值 然 后 运 用 此 值 对 彩 色 图 像 进行 二值 化处 理
,
、
、
,
式
、
自 由 度 龙 门式 和
,
自 由度 直 角 坐 标 形 式 的 机械 手进
。
行 跨 行收 获
, ,
不 损 害 植 株 的 条 件下
。
按照 一 定 的标
,
准 完 成 果蔬 的 收 获 同 时 也 要 考 虑 经