霍尔传感器转速测量电路设计
应用霍尔集成传感器测量转速电路设计 黄河科技学院课程设计9

应用霍尔集成传感器测量转速电路设计摘要在工程实践中,经常碰到需要测量转速的场合,而单片机作为一款性价比很高的微控制器在测速系统有着广泛的应用。
首先,本文叙述了单片机测量转速的系统构成及转速测量的几种常用方法。
其次,介绍了一种基于89C51单片机的电动机测速系统,该系统利用霍尔传感器产生脉冲信号,通过定时算法程序,将转速结果实时显示出来。
最后,对测量指标进行了分析、比较并提出改进方案。
关键词:单片机,转速测量,霍尔传感器目录1 绪论 (1)1.1课题的背景 (1)1.2课题的目的及意义 (1)1.3设计思路与内容 (2)2 基于单片机的转速测量原理 (3)2.1转速的测量原理 (3)2.2转速的测量方法 (4)2.2.1测频法“M法” (4)2.2.2测周期法“T法” (4)2.2.3测频测周法M/T法 (5)2.3误差和精度分析 (6)2.3.1“M法”测量误差分析 (6)2.3.2“T法”测量误差分析 (7)2.3.3“M/T法”测量误差分析 (7)3 霍尔传感器测转速系统的单元电路介绍 (8)3.1单片机的介绍 (8)3.2霍尔传感器选型 (10)3.3开关霍尔传感器的性能分析 (10)3.4系统显示电路介绍 (10)3.4.1 74HC595的介绍 (10)3.4.2 数码管介绍 (11)4 电路的硬件设计 (12)4.1设计的方框图 (12)4.2单元电路的设计 (13)4.2.1单片机主控电路设计 (13)4.2.2脉冲产生电路设计 (14)4.2.3按键电路设计 (15)4.2.3数码管结构和显示原理 (15)4.3电路的整机原理图的设计(分析工作原理) (16)5 软件设计 (17)5.1单片机转速程序设计思路及过程 (17)5.1.1单片机程序设计思路 (17)5.1.2单片机转速计算程序 (18)5.1.3二-十进制转换程序 (19)5.2程序设计 (21)致谢 ...................................................................................................... 错误!未定义书签。
应用霍尔集成传感器测量转速电路设计黄河科技学院课程设计1解析
应用霍尔集成传感器测量转速电路设计摘要本文是基于51单片机的转速测量系统,其测量方法较多,随着单片机对脉冲信号的处理能力越来越强大,使得全数字量系统越来越普及,并且使转速测量系统也可以用全数字化处理。
本设计利用霍尔效应对旋转物体进行检测的转速测量系统。
该系统采用UGN3144霍尔传感器把转速信息转换为电压输出,输出电压经整形电路送入AT89C51单片机进行数据处理并用四位7段LED显示器显示测量结果。
文中首先阐述了构成该系统的原理、硬件的实现方法,在该系统中对信号频率进行测量是首要任务,通过各种测量方法的对比下,该系统应采用测频法测量。
其次,在软件设计部分,此系统包含系统初始化程序的设计、数据接收和处理程序的设计、显示程序的设计三个模块。
最终,给出各部分的原理框图、电路图及转速测量的程序流程图,并编出其具体的程序。
总之,本课题完成了硬件和软件系统的设计,实现了转速测量系统的测量,转速计算、显示功能,同时实现键盘的开始/停止功能,完成了设计的要求。
关键词: 单片机, 转速测量, 霍尔传感器目录1 绪论 (1)1.1课题研究的目的和意义 (1)1.2转速测量在国内外的研究 (1)2 转速测量系统的总体方案 (2)2.1转速测量的一般方法 (2)2.2硬件设计总体方案 (4)2.3软件设计思路 (5)3 系统硬件设计 (5)3.1转速测量原理 (6)3.1.1 测频法“M法 (6)3.1.2 测周期法“T法” (7)3.1.3 测频测周法“M/T法” (7)3.1.4 转速测量系统中应用的方法 (8)3.2霍尔传感器的简介 (9)3.2.1 霍尔效应 (9)3.2.2 霍尔元件 (12)3.2.3 UGN3144霍尔开关元件 (13)3.3单片机及其接口的设计 (15)3.3.1 AT89C51单片机的简介 (15)3.3.2 复位电路 (18)3.3.3 时钟电路 (19)3.3.4 显示电路 (20)3.3.5 HD7279接口 (22)3.3.6 键盘电路 (25)4 系统软件设计 (25)4.1单片机转速程序设计思路及过程 (25)4.1.1 单片机程序设计思路 (26)4.2子程序设计 (27)4.2.1 单片机转速计算程序 (27)4.2.2 二-十进制转换程序 (27)4.2.3 显示程序 (28)5 转速测量系统的转速分析 (30)5.1测速范围 (30)5.2测量误差 (31)结论 (33)致谢 (34)参考文献 (35)附录1 (36)附录2 (37)1绪论1.1课题研究的目的和意义随着超大规模集成电路技术提高,尤其是单片机应用技术以其功能强大,价格低廉的显著特点,使全数字化测量转速系统得以广泛应用。
霍尔式传感器转速测量系统的设计课件

设计时应考虑选择合适的算 法,以准确提取转速信息。
还需要考虑如何将转速值进行 显示或输出,以满足用户的需
求。
05
系统测试与验证
测试环境搭建
01Biblioteka 0203测试设备霍尔式传感器、转速计、 信号发生器、示波器、数 据采集卡等。
测试环境
搭建一个封闭的测试环境 ,模拟实际工作条件,包 括温度、湿度、振动等环 境因素。
要根据传感器的输出信号特性和系统要求, 选择合适的放大器和反馈回路,以保证信号 放大的效果和稳定性。
信号处理电路设计
01
信号处理电路的作用
对放大后的信号进行进一步的处理,如滤波、整形等,以便得到准确的
转速信息。
02
信号处理电路的组成
主要包括比较器、滤波器、触发器等部分。
03
信号处理电路的设计要点
要根据系统的测量精度和抗干扰能力要求,选择合适的比较器和滤波器
霍尔元件
利用霍尔效应制成的半导体元件, 能够将磁场信号转换为电信号。
霍尔元件工作原理
当磁铁靠近霍尔元件时,由于磁场 的作用,霍尔元件内部产生霍尔电 动势,从而输出相应的电压信号。
霍尔式传感器的应用
转速测量
利用霍尔式传感器测量旋转物 体的转速,通过测量磁铁的旋
转速度来计算转速。
磁场检测
霍尔式传感器可用于检测磁场 强度、方向和变化,广泛应用 于电机控制、磁记录等领域。
位置检测
通过检测磁场的变化,霍尔式 传感器还可以用于检测物体的 位置和位移,如接近开关、位 移传感器等。
电流检测
在电力系统中,霍尔式传感器 可用于测量电流大小和方向, 具有测量精度高、线性度好等
优点。
03
系统硬件设计
实验九 开关式霍尔传感器测转速实验

姓名____________班级____________学号____________实验九开关式霍尔传感器测转速实验一、实验目的:了解开关式霍尔传感器测转速的应用。
掌握测量方法。
二、基本原理:开关式霍尔传感器是线性霍尔元件的输出信号经放大器放大,再经施密特电路整形成矩形波(开关信号)输出的传感器。
开关式霍尔传感器测转速的原理框图9—1所示。
当被测圆盘上装上6只磁性体时,圆盘每转一周磁场就变化6次,开关式霍尔传感器就同频率f相应变化输出,再经转速表显示转速n。
图9—1开关式霍尔传感器测转速原理框图三、需用器件与单元:主机箱中的转速调节0~24V直流稳压电源、+5V直流稳压电源、电压表、频率\转速表;霍尔转速传感器、转动源。
四、实验步骤:1、根据图9—2将霍尔转速传感器安装于霍尔架上,传感器的端面对准转盘上的磁钢并调节升降杆使传感器端面与磁钢之间的间隙大约为2~3mm。
2、将主机箱中的转速调节电源0~24V旋钮调到最小(逆时针方向转到底)后接入电压表(电压表量程切换开关打到20V档);其它接线按图19—2所示连接(注意霍尔转速传感器的三根引线的序号);将频频\转速表的开关按到转速档。
3、检查接线无误后合上主机箱电源开关,在小于12V范围内(电压表监测)调节主机箱的转速调节电源(调节电压改变直流电机电枢电压),观察电机转动及转速表的显示情况。
图9—2 霍尔转速传感器实验安装、接线示意图4、从2V开始记录每增加1V相应电机转速的数据(待电机转速比较稳定后读取数据)。
请同学们自拟实验表格并记录两组实验数据。
2.033.004.005.006.007.008.009.00 10.0 11.0 12.0 V(V)400 620 860 1090 1320 1550 1780 2020 2260 2480 2700 N(rpm)2.003.004.005.006.007.008.009.00 10.0 11.0 12.0 V(V)390 630 870 1100 1330 1560 1790 2030 2270 2490 2710 N(rpm)画出电机的V-n(电机电枢电压与电机转速的关系)特性曲线。
基于逻辑电路的转速检测系统的设计

基于逻辑电路的转速检测系统的设计随着科技的不断发展,各种电子设备不断出现并得到广泛的应用,特别是在工业自动化领域,电子设备的发展更是迅速。
作为其中的重要组成部分,逻辑电路已经被广泛应用。
基于逻辑电路的转速检测系统是这样一种系统,它通过测量电机转速,对电机进行控制,从而实现自动化生产。
一、转速检测的原理转速检测通常使用霍尔传感器或者光电传感器来进行测量。
两种测量方式各有优缺点,根据具体的应用场景选择不同的传感器,以达到最优的效果。
1. 霍尔传感器原理霍尔传感器是一种基于霍尔效应的传感器。
它可以测量磁场强度并将其转化为电压值。
在转速检测中,霍尔传感器通常被放置在电机的旋转轴上,当旋转的磁铁通过传感器时,会产生一个磁场变化,从而产生一个电压值。
经过适当的放大、滤波和处理,可以得到电机的转速。
2. 光电传感器原理光电传感器是一种基于光电效应的传感器。
它可以将光线的变化转化为电压信号。
在转速检测中,光电传感器通常被放置在电机的传动轴上,当旋转的圆盘或铁齿通过传感器时,会遮挡或透过光线,从而产生一个电压信号。
通过适当的处理,可以得到电机的转速。
二、逻辑电路的设计逻辑电路主要用于对测量的电信号进行处理和控制。
转速检测系统中,逻辑电路的设计要根据具体的应用场景进行选择。
1. 基于单片机的逻辑电路设计单片机是一种常见的逻辑电路,它可以对电信号进行处理和控制。
在转速检测中,单片机可以通过读取传感器的电压信号,并进行适当的处理,得到电机的转速。
控制电机的速度可以通过单片机输出控制信号,调整电机转速。
单片机的优点是设计灵活,可以根据具体的应用场景进行选择,但是需要进行编程。
2. 基于逻辑门的逻辑电路设计逻辑门是逻辑电路的基本组成部分,可以方便地实现布尔运算。
在转速检测中,逻辑门可以通过布尔运算,对测量的电信号进行处理和控制。
例如,可以使用或门将多个传感器的信号进行合并,得到更为准确的转速值。
逻辑门的优点是成本较低,不需要编程,但是不如单片机设计灵活。
基于霍尔传感器的电机转速测量系统设计
3 . 程 序 v o i d c o u n t e r ( v o i d )i n t e r r u p t 0 { c o u n t + +: i f ( c o u n t % 6 = = 0 )/ / 6次循 环 为 电机 转 一 圈 {z s + + : / / 转圈计 数加 1 )
—
』
}
。 I ( d i s p l a y f i ] ) :/ / 1 C D显 示 / / d Ma y m S ( 5 0 O ) ‘
一
v o i d d e l a y l m s ( i n t X )/ / 延时 函数 {
i n t i , J :
/ / 5 0 m s定 时
/ / 5 0 . 2 0 = 1 5
T M O D = O x 0 1 :
T H O = T H M1 :
—
T L O = T L _ M 1 : i n i t _ L C M( ): w h i 1 e ( f b = = 0 )
i f ( 斗 + m s e c : = 2 O ) {f b = l :)
1
( 二 ) 定 时 器 中 断 l _ 工 作 过 程 T T O定时器每 1秒定时中断一次,读 取记 录的脉冲个数 。 2 . 流 程 图 如 图 6所 示 :
嘲硅
( 三 )程序 m a i n 0
{P 2 0 = I :
P 2 0 = 0:
I E = 0 x 8 3 :
{)
E A = 0:
i f ( z s > = l O 0 0 )
P 2 0 = I:
霍尔传感器 测转速
HAL3144高灵敏度单极性霍尔开关
• HAL3144E是一款采用 双极性工艺技术的单 极性霍尔效应传感器 IC,响应速度快,灵 敏度高,具有略高的 工作温度范围及可靠 性,它由反向电压器 、电压调整器、霍尔 电压发生器、信号放 大器、施密特触发器 和集电极开路的输出 级组成。
HAL3144霍尔开关的接口图
/*--------------------向LCD1602写数据--------------------*/
void write_data(uchar data0) { rs=1; //选着写数据 rw=0; P0=data0; //向LCD写数据 lcdcs=1; //信号使能端高电平 lcdcs=0; //信号使能端低电平 } /*-------------------------------------------------------*/
/*-----------------------数据处理------------------------*/ void disp_count() { display[7]=(zhuan/1000+'0'); //转换转速的千位 display[8]=(zhuan/100%10+'0'); //转换转速的百位 display[9]=(zhuan/10%10+'0'); //转换转速的十位 display[10]=(zhuan%10+'0'); //转换转速的个位 } /*-------------------------------------------------------*/
液晶显示部分: 显示部分有两个功能,在正常情况下,通过液晶 显示当前转速值,当电机的转速超过设定值通过
霍尔传感器电机转速测量系统设计
霍尔传感器电机转速测量系统设计09电子1班刘荣 090406130 摘要:本文介绍了霍尔传感器测速的原理,设计了基于单片机AT89C51的直流电机转速测量系统。
完成了电机转速测量系统的硬件电路设计、霍尔传感器测量电路的设计、显示电路的设计。
测量转速的霍尔传感器和机轴同轴连接,机轴每转一周,产生一定量的脉冲个数,由霍尔器件电路部分输出幅度为12V的脉冲。
经光电隔离器后成为输出幅度为5V转数计数器的计数脉冲。
控制定时器计数时间,即可实现对电机转速的测量。
在显示电路设计中,通过1602实现在LCD上直观地显示电机的转速值。
并对电机转速测量系统的硬件电路、显示电路进行了调试。
与软件配合,采用模块化方法进行了软件设计,编制了电机转速的测量设计了测量模块、转速模块、报警模块、显示模块等的C51程序,并通过PROTEUSE软件进行了仿真,实现了显示、报警功能。
仿真实验表明所设计的硬件电路及软件程序是正确的,满足设计要求。
关键词:电机转速测量;霍尔传感器;单片机;89C51;LCD液晶显示Abstract:The principles of motor speed measurements with hall sensor was described in this article and DC motor speed measurement system which is based on AT89C51 was designed, and the corresponding hardware circuit designs was also completed accordingly. The hall sensor is connected with crankshaft by coaxial junction. Every revolution of the crankshaft will generate a certain amount of pulses whose amplitude is 12v. The opto-coupler turns these certain amount of pulses into 5-amplitude count impulse. The motor speed can be measured by controlling the time. In the design of display circuit, the number of motor speed is displayed in LCD directly through 1602. The motor speed measurement system and the hardware circuits, display circuit function are debugged to cooperate with the software to display and alarm users. Combination of hardware circuit design, softwares were designed by a modular approach using C51 program, such as the motor speed measurement module, alarm module, display module etc., All these programs were simulated through PROTEUSE.The simulation results have proved that the hardware circuits design and software program is correct, and the system can meet the designing requirement completely.Key WordS: Motor Speed Measurement; Hall Sensor; Microcomputer; 89C51;LCD正文根据霍尔效应,人们用半导体材料制成的元件叫霍尔元件。
霍尔传感器测电机转速课程设计
霍尔传感器测电机转速课程设计一、引言在现代自动化控制系统中,电机是最常用的执行元件之一。
而对电机转速的准确测量对于电机控制和系统性能的优化具有重要意义。
本文将围绕着霍尔传感器测电机转速这一主题展开讨论,深入探究其课程设计的相关内容。
二、霍尔传感器测电机转速原理电机的转速测量是自动化控制中的基础问题,而霍尔传感器作为一种常用的位置传感器,在电机转速测量中发挥着重要作用。
霍尔传感器可以通过检测磁场的变化来测量电机转子的位置,进而计算出电机的转速。
在电机转速测量中,霍尔传感器通过测量每个磁极之间的时间间隔来确定电机转子的角度,从而得到转子的角速度。
基于霍尔传感器的电机转速测量方法可以实现高精度和实时性,并且具有较好的抗干扰能力。
在工程应用中被广泛采用。
三、课程设计内容与要求1. 理论分析在课程设计中,首先需要对霍尔传感器测电机转速的原理进行深入的理论分析,包括霍尔传感器的工作原理、电机转速测量方法及其精度、灵敏度等方面的内容。
学生需要了解霍尔传感器和电机之间的工作原理和相互作用,从而为后续的实验设计和数据分析提供理论支持。
2. 实验设计课程设计还需要包括针对霍尔传感器测电机转速的实验设计。
这包括实验装置的搭建、实验步骤的制定以及数据采集和处理的方法。
学生需要通过实际操作,深入理解霍尔传感器测电机转速的原理,并掌握实际实验技能。
3. 数据分析与报告课程设计还需要对实验数据进行分析与综合,撰写实验报告。
学生需要对实验中获得的数据进行分析,验证霍尔传感器测电机转速的准确性和可靠性,并结合理论知识进行综合分析。
实验报告应包括数据处理的具体方法和结果,以及对实验过程和结论的总结性描述。
四、个人观点与理解在我看来,霍尔传感器测电机转速课程设计对于提升学生的实际动手能力和理论知识应用能力具有重要意义。
通过这样的课程设计,学生可以加深对于霍尔传感器原理和电机转速测量方法的理解,并且培养实验数据处理和报告撰写的能力。
这样的课程设计既有助于学生将所学的理论知识应用到实际中,又可以提高他们的实际操作能力和科研创新能力。
基于霍尔转速传感器的速度信号采集电路的研究与设计_徐敏
中霍尔传感元件 a、b 为输入端,c、d 为输出端。
4 光耦隔离与屏蔽
汽车行驶状态记录仪上的 + 5V 工作系统是弱 电电路,汽车内部提供的脉冲信号在送入记录仪之 前,必须经过光耦隔离的处理,主要作用就是通过电 - 光 - 电的变换将电信号隔离开来。电路如图 5 所 示,速度信号先通过阻容滤波电路,消除掉抖动及脉 冲干扰,然后通过光耦隔离电路,在电气上使输入信 号和输出信号完全绝缘,抑制了各种干扰信号进入 记录仪而影响微处理器的正常工作[4]。
第 20 期
徐 敏: 基于霍尔转速传感器的速度信号采集电路的研究与设计
35
到需要的输出。实际过程中一个数字系统的实现常 常是两种方法的综合,采用自顶向下的设计方法,顶 层采用图形输入法,下层对应顶层图形中子模块的 设计采用程序设计法,用 VHDL 或 Verilog HDL 等语 言编程实现[5]。
该系统的主要功能包括: 实时监测并记录汽车 行驶的各种状态信息、为驾驶员提供单独的可移动 存储卡式设备、方便灵活的操作界面、实时的信息显 示以及超速报警。而系统的首要任务是采集汽车的 行驶状态信息,包括速度、里程、超速度及时间、停车 次数及时间等,这里面最重要的是速度信息,其他信 息可由速度计算或分析得出。
图书情报学刊,2010( 6) .
4 结语
[4] 郭文妍 . 浅谈现代图书馆员应具备的素质[J]. 前沿, 2010( 7) .
图书馆是精神文明的窗口,人类进入 21 世纪以 后,随着信息技术和网络技术在图书馆领域的普及
[5] 韦美良,覃岚 . 提高馆员素质顺应时代发展[J]. 农业 图书情报学刊,2007( 3) .
求精度高、可靠性好、反应快、抗干扰和抗振动能力 强,才能准确地实时检测汽车运行的有关状态。因 霍尔传感器具有灵敏度高,线性度好,稳定性高,体 积小,耐高温和适合于低转速测量等特点,所以本系 统选用霍尔转速传感器[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
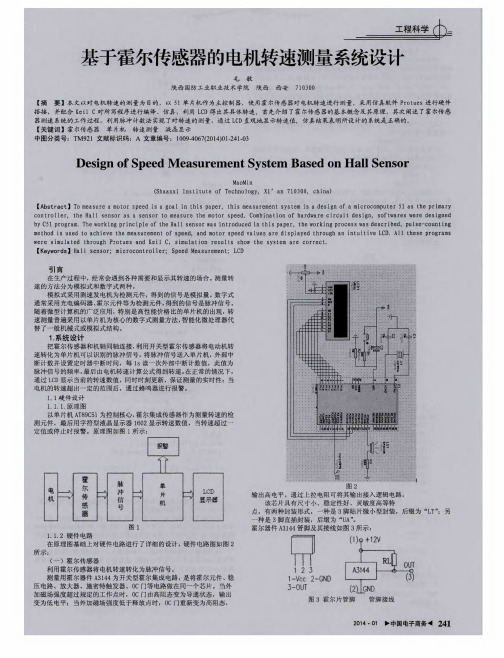
课程设计报告书2.概述2.1系统组成框图系统由传感器、信号预处理电路、处理器、显示器和系统软件等部分组成。
传感器部分采用霍尔传感器,负责将电机的转速转化为脉冲信号。
信号预处理电路包含待测信号放大、波形变换、波形整形电路等部分,其中放大器实现对待测信号的放大,降低对待测信号的幅度要求,实现对小信号的测量;波形变换和波形整形电路实现把正负交变的信号波形变换成可被单片机接受的TTL/CMOS兼容信号。
处理器采用AT89C51单片机,显示器采用8位LED数码管动态显示。
本课题采用的是以8051系列的AT89C51单片机为核心开发的霍尔传感器测转速的系统。
系统硬件原理框图如图1所示:图1 系统框图2.2系统工作原理转速是工程上一个常用的参数,旋转体的转速常以每分钟的转数来表示。
其单位为 r/min。
由霍尔元件及外围器件组成的测速电路将电动机转速转换成脉冲信号,送至单片机AT89C51的计数器 T0进行计数,用T1定时测出电动机的实际转速。
此系统使用单片机进行测速,采用脉冲计数法,使用霍尔传感器获得脉冲信号。
其机械结构也可以做得较为简单,只要在转轴的圆盘上粘上两粒磁钢,让霍尔传感器靠近磁钢,机轴每转一周,产生两个脉冲,机轴旋转时,就会产生连续的脉冲信号输出。
由霍尔器件电路部分输出,成为转速计数器的计数脉冲。
控制计数时间,即可实现计数器的计数值对应机轴的转速值。
单片机CPU将该数据处理后,通过LED显示出来。
2.2.1霍尔传感器霍尔传感器是对磁敏感的传感元件,由磁钢、霍耳元件等组成。
测量系统的转速传感器选用SiKO 的 NJK-8002D 的霍尔传感器,其响应频率为100KHz ,额定电压为5-30(V )、检测距离为10(mm )。
其在大电流磁场或磁钢磁场的作用下,能测量高频、工频、直流等各种波形电流。
该传感器具有测量精度高、电压范围宽、功耗小、输出功率大等优点,广泛应用在高速计数、测频率、测转速等领域。
输出电压4~25V ,直流电源要有足够的滤波电容,测量极性为N 极。
安装时将一非磁性圆盘固定在电动机的转轴上,将磁钢粘贴在圆盘边缘,磁钢采用永久磁铁,其磁力较强,霍尔元件固定在距圆盘1-10mm 处。
当磁钢与霍尔元件相对位置发生变化时,通过霍尔元件感磁面的磁场强度就会发生变化。
圆盘转动,磁钢靠近霍尔元件,穿过霍尔元件的磁场较强,霍尔元件输出低电平;当磁场减弱时,输出高电平,从而使得在圆盘转动过程中,霍尔元件输出连续脉冲信号。
这种传感器不怕灰尘、油污,在工业现场应用广泛。
2.2.2转速测量原理霍尔器件是由半导体材料制成的一种薄片,器件的长、宽、高分别为 l 、b 、d 。
若在垂直于薄片平面(沿厚度 d )方向施加外磁场B ,在沿l 方向的两个端面加一外电场,则有一定的电流流过。
由于电子在磁场中运动,所以将受到一个洛仑磁力,其大小为:qVB f =式中:f —洛仑磁力, q —载流子电荷, V —载流子运动速度, B —磁感应强度。
这样使电子的运动轨迹发生偏移,在霍尔元器件薄片的两个侧面分别产生电子积聚或电荷过剩,形成霍尔电场,霍尔元器件两个侧面间的电位差H U 称为霍尔电压。
霍尔电压大小为: H U H R =d B I /⨯⨯(mV)式中:H R —霍尔常数, d —元件厚度,B —磁感应强度, I —控制电流 设 H K H R =d /, 则H U =H K d B I /⨯⨯(mV)H K 为霍尔器件的灵敏系数(mV/mA/T),它表示该霍尔元件在单位磁感应强度和单位控制电流下输出霍尔电动势的大小。
应注意,当电磁感应强度B 反向时,霍尔电动势也反向。
图2为霍耳元件的原理结构图。
若控制电流保持不变,则霍尔感应电压将随外界磁场强度而变化,根据这一原理,可以将两块永久磁钢固定在电动机转轴上转盘的边沿,转盘随被测轴旋转,磁钢也将跟着同步旋转,在转盘附近安装一个霍尔元件,转盘随轴旋转时,霍尔元件受到磁钢所产生的磁场影响,输出脉冲信号。
传感器内置电路对该信号进行放大、整形,输出良好的矩形脉冲信号,测量频率范围更宽,输出信号更精确稳定,已在工业,汽车,航空等测速领域中得到广泛的应用。
其频率和转速成正比,测出脉冲的周期或频率即可计算出转速。
3.基于霍尔传感器测转速系统的硬件设计3.1系统硬件电路图3 硬件电路图图2 霍尔元件的原理结构图OH137AT89C5110K20pfV CC+5VSNNSU O3.2系统总电路仿真图图4 硬件仿真图4.基于霍尔传感器测转速系统的软件设计本设计软件主要为主程序、数据处理显示程序、定时器中断服务程序三个部分。
(1)主程序主要完成初始化功能,包括LED显示的初始化,中断的初始化,定时器的初始化,寄存器、标志位的初始化等。
主程序流程图如图5所示。
(2)数据处理显示模块程序。
此模块中单片机对在1秒内的计数值进行处理,转换成r/min送显示缓存以便显示。
具体算法如下:设单片机每秒计数到n个值,即n/2 (r/s)(圆盘贴两个磁钢)。
则n/2 (r/s)=30n(r/min)。
即只要将计数值乘以30便可得到每分钟电机的转速。
数据处理显示模块流程图如图6所示。
图5 主程序流程图图图6 数据处理显示模块流程图(3)定时器1中断服务程序设计。
定时器1完成计时功能,定时50ms,进行定时中断计数并每隔1s更新一次显示数据。
流程图如图7所示。
图7 定时器1中断服务程序流程图5.制作调试5.1硬件调试硬件调试时先分步调试硬件中各个功能模块,调试成功后再进行统调。
安装固定电机和霍尔传感器时,粘贴磁钢需注意,霍尔传感器对磁场方向敏感,粘贴之前可以先手动接近一下传感器,如果没有信号输出,可以换一个方向再试。
霍尔传感器探头要对准转盘上的磁钢位置,安装距离要在10mm以内才可灵敏的感应磁场变化。
在磁场增强时霍尔传感器输出低电平,指示灯亮;磁场减弱时输出高电平,指示灯熄灭。
当电机转动时,感应电压指示灯高频闪烁,所以视觉上指示灯不会有多大的闪烁感。
当给NJK 8002D 型霍尔传感器施加15V电压时其输出端可以输出4V的感应电压。
输出幅值为4V的矩形脉冲信号。
5.2软件调试测量系统与PC机连接时一定要先连接串行通信电缆,然后再将其电源线插入USB接口;拆除时先断开其电源,再断开串行通信电缆,否则极易损坏PC机的串口。
在进行软件编程调试时需要用到单片机的集成开发环境MedWin V2.39 软件,编程时极易出现误输入或其他的一些语法错误,最重要的还有一些模块无语法错误却达不到预期的功能,都要经过调试才能排除。
MedWin V2.39 软件具有很强大的编程调试功能,能够模拟仿真实际单片机的端口和内部功能部件的状态值。
该软件中有硬件调试和软件调试功能,可以观察单片机内存单元对应的运行值,可以显示单片机端口、中断、定时器1、定时器2还有串口对应的运行值。
可以单步调试也可以模块调试,最好的是可以对你所怀疑的语句模块设置断点。
MedWin V2.39 具有的强大的编译调试功极大地方便了对软件部分的调试。
在具体调试过程中,系统将各功能模块如数据处理程序、按键程序设计、中断服务子程序、LED显示程序分别分开进行调试,最后进行主程序的整体调试。
编译无误后生成目标代码BIN文件。
采用AT单片机下载相应的软件,将其下载到实验板的单片机中。
下载软件的最后一步:点击软件界面中的[下载]按钮,在点击前一定要保持实验板的串行通信线及电源线与PC机连接良好,并且实验板的电源开关处于关闭状态,然后点击[下载]按钮,再打开实验板电源开关,此时软件将自动完成程序下载。
最后将硬件和软件结合起来整体调试实现系统的测速功能。
6.测试结果分析设计基本完成题目中的各项要求,其中电机转速的测量比较精确,与实际转速相差10 转/分左右,精度在全量程范围内优于10转/分,存在一定的误差,经分析主要是由以下原因造成:1)由于电机的转盘是采用塑料盘片磨制而成,高速旋转时容易打飘不稳,导致获得的脉冲信号频率与实际转速有一定的误差。
2) 中断处理的进入和中断处理程序都会有一定时间的误差,从而导致定时时间的误差,这也是造成测量误差的一个因素。
3)在固定装置时,由于是手动操作,从而导致初始获得信号有一定的时差。
结论霍尔传感器具有不怕灰尘、油污,安装简易,不易损坏等优点,在工业现场得到了广泛应用。
利用霍尔传感器设计的转速测量系统以单片机AT89C51为数据处理核心,采用定时器定时中断的方法实现计数,对测量数据进行计算得到转速数据,并将结果送数码管显示。
整个测量系统硬件电路简单,容易调试,软件部分编程采用C51,有较高的编程效率。
测试结果表明对电动机转速的测量精度较高,基本能够满足实际的测试需要,有一定的实际应用价值。
致谢在这次课程设计的撰写过程中,我得到了许多人的帮助。
首先我要感谢我的老师在课程设计上给予我的指导、提供给我的支持和帮助,这是我能顺利完成这次报告的主要原因,更重要的是老师帮我解决了许多技术上的难题,让我能把系统做得更加完善。
在此期间,我不仅学到了许多新的知识,而且也开阔了视野,提高了自己的设计能力。
其次,我要感谢帮助过我的同学,他们也为我解决了不少我不太明白的设计上的难题。
同时也感谢学院为我提供良好的做毕业设计的环境。
最后再一次感谢所有在设计中曾经帮助过我的良师益友和同学。
参考文献[1] 何希才,薛永毅.传感器及其应用实例[M]. 北京:机械工业出版社,2004.1[2] 谭浩强 .C程序设计(第二版)[M]. 北京:清华大学出版社,1999[3] 谢嘉奎,宣月清,冯军 .电子线路[M]. 北京:高等教育出版社,2004[4] 康华光 .电子技术基础[M]. 北京:高等教育出版社,2004[5] 胡斌 .图表细说电子元器件[M]. 北京:电子工业出版社,2004.5[6] [德]克劳斯·贝伊特.电子元件[M]. 北京:科学出版社,1999.8[7] 余锡存,曹国华 .单片机原理与接口技术[M]. 西安:西安电子科技大学出版社, 2000.7附录 C语言程序#include <reg51.h>#include <stdio.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned int#define DataPort P1sbit LATCH1=P2^0;//定义锁存使能端口段锁存sbit LATCH2=P2^1;//sbit PPP=P3^1;sbit zzz=P0^7;unsigned char codeHEYAO_WeiMa[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};unsigned char codeTempData[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x00,0x40}; uchar dispbuf[8]={0,0,0,0,0,0,10,10};uchar Temp[8];uchar dispcount;uchar T0count;uchar timecount;bit flag;unsigned long x;//timecount;void delay() ;void Display(unsigned char FirstBit,unsigned char Num){static unsigned char i=0;do{DataPort=0xff; //清空数据,防止有交替重影LATCH1=1; //段锁存LATCH1=0;DataPort=HEYAO_WeiMa[i+FirstBit]; //取位码LATCH2=1; //位锁存LATCH2=0;DataPort=Temp[i]; //取显示数据,段码LATCH1=1; //段锁存LATCH1=0;i++;if(i==Num)i=0;delay();}while(PPP==1);}void main(){PPP=1;TMOD=0x15;//TH1定时,模式1;TH0计数,模式1 TH0=0;TL0=0;TH1=(65536-50000)/256;TL1=(65536-50000)%256;ET0=1;ET1=1;//TH0,1溢出允许中断EA=1;//允许中断TR1=1;TR0=1;//开始计数while(1){if(flag==1){flag=0;x=(TH0*256+TL0)*5;if(x>6000){int i;for(i=0;i<30;i++){zzz=0;delay();zzz=1;delay();}}Temp[0]= TempData[x%10];Temp[1]= TempData[x%100/10];Temp[2]=TempData[x/100%10];Temp[3]=TempData[x/1000%10];Display(0,4);timecount=0;T0count=0;TH0=0;TL0=0;TH1=(65536-50000)/256;TL1=(65536-50000)%256;TR0=1;TR1=1;PPP=1;}}}void t0(void) interrupt 1{T0count++;}void t1(void) interrupt 3 using 0{TH1=(65536-50000)/256;TL1=(65536-50000)%256; timecount++;if(timecount==20){TR0=0;TR1=0;timecount=0;flag=1;}}void delay(){ int i;for (i=0;i<125;i++){ _nop_(); }}。