Fanuc 0-TD系统传输设定
Fanuc 系统传输设定
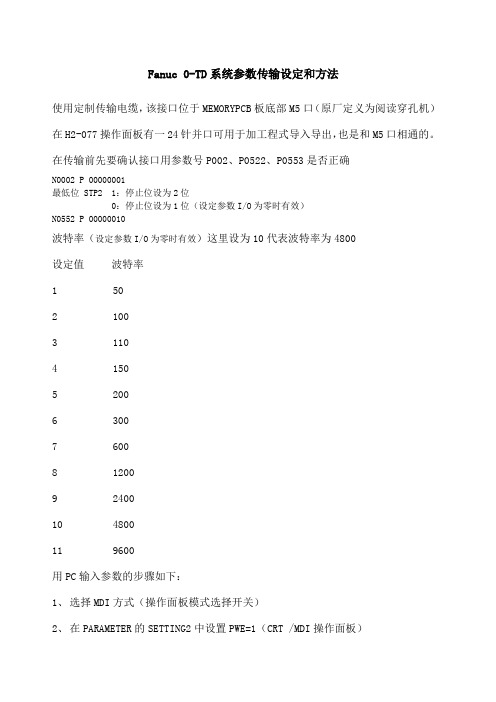
Fanuc 0-TD系统参数传输设定和方法使用定制传输电缆,该接口位于MEMORYPCB板底部M5口(原厂定义为阅读穿孔机)在H2-077操作面板有一24针并口可用于加工程式导入导出,也是和M5口相通的。
在传输前先要确认接口用参数号P002、P0522、P0553是否正确N0002 P 00000001最低位 STP2 1:停止位设为2位0:停止位设为1位(设定参数I/O为零时有效)N0552 P 00000010波特率(设定参数I/O为零时有效)这里设为10代表波特率为4800设定值波特率1 502 1003 1104 1505 2006 3007 6008 12009 240010 480011 9600用PC输入参数的步骤如下:1、选择MDI方式(操作面板模式选择开关)2、在PARAMETER的SETTING2中设置PWE=1(CRT /MDI操作面板)3、选择EDIT方式/按下急停4、选择PARAM(CRT /MDI操作面板)5、按下INPUT键6、PC端打开PCIN软件,选择DATE OUT 文件路径c:\DATEP Y/N?按Y 显示传输字节数7、传输完毕选择MDI方式8、在PARAMETER的SETTING2中设置PWE=0(CRT /MDI操作面板)9、按RESET键消除P/S001报警(若出现000报警,请关闭电源)参数输出到PC1、确认接口用参数号P002、P0522、P0553是否正确2、选择EDIT方式3、按PARAM键4、PC端打开PCIN软件,选择DATE IN 文件路径c:\DATEP Y/N?按Y 等待接收数据5、按output键、PC端显示传输字节数参数输入 EDIT方式/紧急停止 PARAM INPUT偏置输入 EDIT方式 OFSET INPUT程序输入 EDIT/AUTO方式 PRGRM INPUT参数输出 EDIT方式 PARAM START/OUTPUT偏置输出 EDIT方式 OFSET START/OUTPUT全部程序输出 EDIT/AUTO方式 PRGRM O9999 START/OUTPUT。
FANUC 0i-D 系统参数设定的基本方法
FANUC 0i-D系统参数设定的基本方法
任务内容
FANUC 0i-D/0i Mate-D数控系统参数的类型
典型参数的表达方式
参数的显示与搜索
用MDI方式设定参数
数控系统上电全清
FANUC 0i-D数控系统具有丰富的机床参数。
数控系统参数是数控系统用来匹配数控机床及其功能的一系列数据,数控系统硬件连接完成后,要对其进行系统参数的设定和调整才能保证数控机床正常运行,达到机床加工功能要求和精度要求;同时,参数设置在数控机床调试与维修中起着重要的作用。
一、FANUC 0i-D/0i Mate-D数控系统参数的类型
1、按照数控系统参数的控制功能分
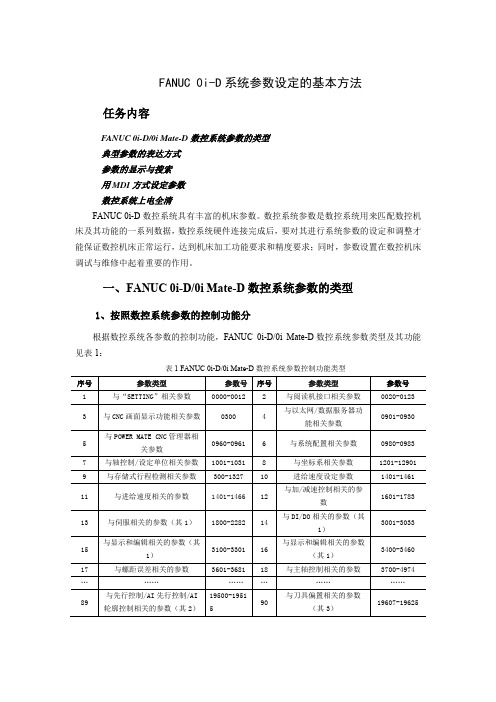
根据数控系统各参数的控制功能,FANUC 0i-D/0i Mate-D数控系统参数类型及其功能见表1:
表1 FANUC 0i-D/0i Mate-D数控系统参数控制功能类型。
Fanuc0-TD系统传输设定
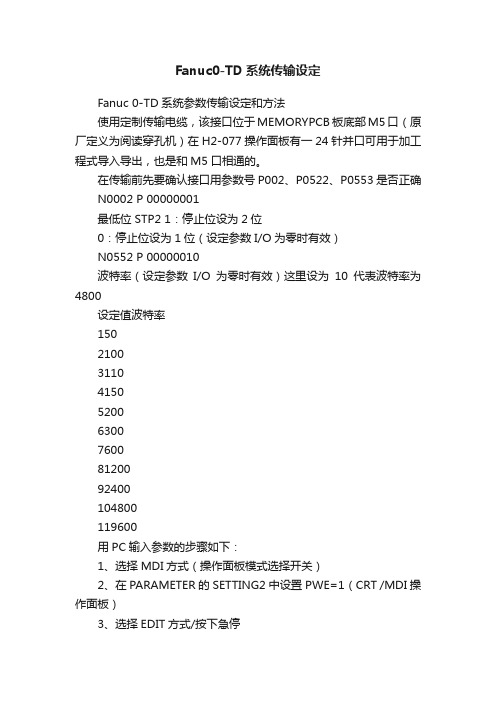
Fanuc0-TD系统传输设定Fanuc 0-TD系统参数传输设定和方法使用定制传输电缆,该接口位于MEMORYPCB板底部M5口(原厂定义为阅读穿孔机)在H2-077操作面板有一24针并口可用于加工程式导入导出,也是和M5口相通的。
在传输前先要确认接口用参数号P002、P0522、P0553是否正确N0002 P 00000001最低位 STP2 1:停止位设为2位0:停止位设为1位(设定参数I/O为零时有效)N0552 P 00000010波特率(设定参数I/O为零时有效)这里设为10代表波特率为4800设定值波特率1502100311041505200630076008120092400104800119600用PC输入参数的步骤如下:1、选择MDI方式(操作面板模式选择开关)2、在PARAMETER的SETTING2中设置PWE=1(CRT /MDI操作面板)3、选择EDIT方式/按下急停4、选择PARAM(CRT /MDI操作面板)5、按下INPUT键6、PC端打开PCIN软件,选择DATE OUT 文件路径c:\DATEP Y/N?按Y 显示传输字节数7、传输完毕选择MDI方式8、在PARAMETER的SETTING2中设置PWE=0(CRT /MDI操作面板)9、按RESET键消除P/S001报警(若出现000报警,请关闭电源)参数输出到PC1、确认接口用参数号P002、P0522、P0553是否正确2、选择EDIT方式3、按PARAM键4、PC端打开PCIN软件,选择DATE IN 文件路径c:\DATEP Y/N?按Y 等待接收数据5、按output键、PC端显示传输字节数参数输入EDIT方式/紧急停止PARAM INPUT偏置输入EDIT方式OFSET INPUT程序输入EDIT/AUTO方式PRGRM INPUT参数输出EDIT方式PARAM START/OUTPUT偏置输出EDIT方式OFSET START/OUTPUT全部程序输出EDIT/AUTO方式PRGRM O9999 START/OUTPUT。
FANUC 0-TD系统
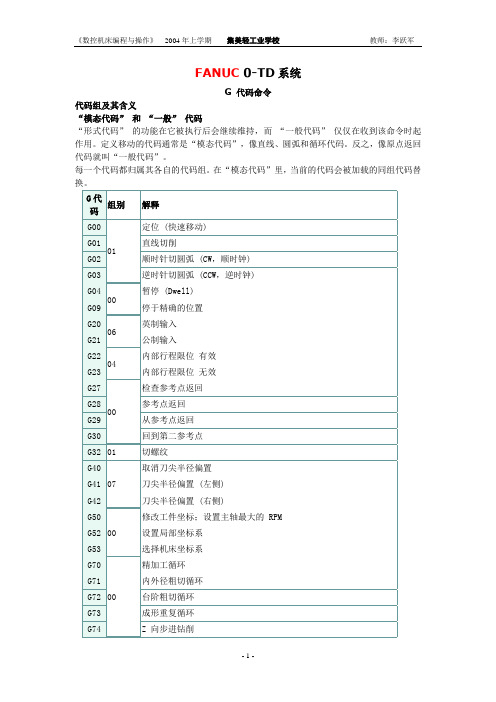
FANUC 0-TD系统G 代码命令代码组及其含义“模态代码” 和“一般” 代码“形式代码” 的功能在它被执行后会继续维持,而“一般代码” 仅仅在收到该命令时起作用。
定义移动的代码通常是“模态代码”,像直线、圆弧和循环代码。
反之,像原点返回代码就叫“一般代码”。
每一个代码都归属其各自的代码组。
在“模态代码”里,当前的代码会被加载的同组代码替G75 X 向切槽G76 切螺纹循环G8010 取消固定循环G83 钻孔循环G84 攻丝循环G85 正面镗孔循环G87 侧面钻孔循环G88 侧面攻丝循环G89 侧面镗孔循环G9001 (内外直径)切削循环G92 切螺纹循环G94 (台阶) 切削循环G9612 恒线速度控制G97 恒线速度控制取消G9805 每分钟进给率G99 每转进给率代码解释G00 定位1. 格式G00 X_ Z_这个命令把刀具从当前位置移动到命令指定的位置(在绝对坐标方式下),或者移动到某个距离处(在增量坐标方式下)。
2. 非直线切削形式的定位我们的定义是:采用独立的快速移动速率来决定每一个轴的位置。
刀具路径不是直线,根据到达的顺序,机器轴依次停止在命令指定的位置。
3. 直线定位刀具路径类似直线切削(G01) 那样,以最短的时间(不超过每一个轴快速移动速率)定位于要求的位置。
4. 举例N10 G0 X100 Z65G01 直线插补1. 格式G01 X(U)_ Z(W)_ F_ ;直线插补以直线方式和命令给定的移动速率从当前位置移动到命令位置。
X, Z: 要求移动到的位置的绝对坐标值。
U,W: 要求移动到的位置的增量坐标值。
2. 举例① 绝对坐标程序G01 X50. Z75. F0.2 ;X100.;② 增量坐标程序G01 U0.0 W-75. F0.2 ;U50.圆弧插补(G02, G03)1. 格式G02(G03) X(U)__Z(W)__I__K__F__ ;G02(G03) X(U)__Z(W)__R__F__ ;G02 –顺时钟(CW)G03 –逆时钟(CCW)X, Z –在坐标系里的终点U, W –起点与终点之间的距离I, K –从起点到中心点的矢量(半径值) R –圆弧范围(最大180 度)。
FANUC 0I-TD系统编程参考手册
.FANUC 0-TD 系统编程参考手册FANUC 0-TD系统编程参考手册坐标系统程序原点在程序开发开始之前必须决定坐标系和程序的原点。
通常把程序原点确定为便于程序开发和加工的点。
在多数情况下,把Z 轴与X 轴的交点设置为程序原点坐标原点1. 机床坐标系统这个坐标系统用一个固定的机床的点作为其原点。
在执行返回原点操作时,机床移动到此机床原点。
2. 绝对坐标系统用户能够可建立此坐标系统。
它的原点可以设置在任意位置,而它的原点以机床坐标值显示。
3. 相对坐标系统这个坐标系统把当前的机床位置当作原点,在此需要以相对值指定机床位置时使用。
4. 剩余移动距离此功能不属于坐标系。
它仅仅显示移动命令发出后目的位置与当前机床位置之间的距离。
仅当各个轴的剩余距离都为零时,这个移动命令才完成。
设置坐标系开发程序首先要决定坐标系。
程序原点与刀具起点之间的关系构成坐标系;这个关系应当随着程序的执行输入给NC 机床,这个过程能够用G50 命令来实现。
在切削进程开始时,刀具应当在指定的位置;由于上面所述设置原点的过程已经完成,工件坐标系和刀具起始位置就定了;刀具更换也在这个被叫为起点的位置操作。
绝对/增量坐标系编程NC 车床有两个控制轴;对这种2 轴系统有两种编程方法:绝对坐标命令方法和增量坐标命令方法。
此外,这些方法能够被结合在一个指令里。
对于X 轴和Z 轴寻址所要求的增量指令是U 和W。
①绝对坐标程序---X40.Z5.;②增量坐标程序---U20.W-40.;③混合坐标程序---X40.W-40.;G 代码命令代码组及其含义“模态代码”和“一般”代码“形式代码”的功能在它被执行后会继续维持,而“一般代码”仅仅在收到该命令时起作用。
定义移动的代码通常是“模态代码”,像直线、圆弧和循环代码。
反之,像原点返回代码就叫“一般代码”。
每一个代码都归属其各自的代码组。
在“模态代码”里,当前的代码会被加载的同组代码替换。
代码解释G00 定位1. 格式G00 X_ Z_这个命令把刀具从当前位置移动到命令指定的位置(在绝对坐标方式下),或者移动到某个距离处(在增量坐标方式下)。
FANUC0—TD-TDⅡ系统介绍.doc
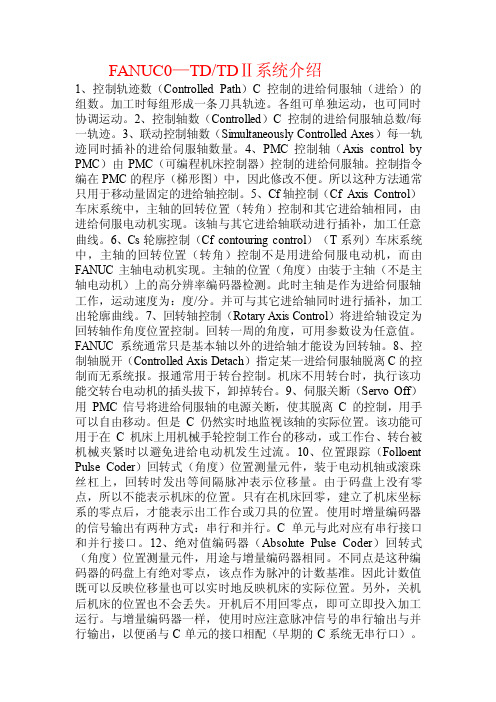
FANUC0—TD/TDⅡ系统介绍1、控制轨迹数(Controlled Path)C控制的进给伺服轴(进给)的组数。
加工时每组形成一条刀具轨迹。
各组可单独运动,也可同时协调运动。
2、控制轴数(Controlled)C控制的进给伺服轴总数/每一轨迹。
3、联动控制轴数(Simultaneously Controlled Axes)每一轨迹同时插补的进给伺服轴数量。
4、PMC控制轴(Axis control by PMC)由PMC(可编程机床控制器)控制的进给伺服轴。
控制指令编在PMC的程序(梯形图)中,因此修改不便。
所以这种方法通常只用于移动量固定的进给轴控制。
5、Cf轴控制(Cf Axis Control)车床系统中,主轴的回转位置(转角)控制和其它进给轴相同,由进给伺服电动机实现。
该轴与其它进给轴联动进行插补,加工任意曲线。
6、Cs轮廓控制(Cf contouring control)(T系列)车床系统中,主轴的回转位置(转角)控制不是用进给伺服电动机,而由FANUC主轴电动机实现。
主轴的位置(角度)由装于主轴(不是主轴电动机)上的高分辨率编码器检测。
此时主轴是作为进给伺服轴工作,运动速度为:度/分。
并可与其它进给轴同时进行插补,加工出轮廓曲线。
7、回转轴控制(Rotary Axis Control)将进给轴设定为回转轴作角度位置控制。
回转一周的角度,可用参数设为任意值。
FANUC系统通常只是基本轴以外的进给轴才能设为回转轴。
8、控制轴脱开(Controlled Axis Detach)指定某一进给伺服轴脱离C的控制而无系统报。
报通常用于转台控制。
机床不用转台时,执行该功能交转台电动机的插头拔下,卸掉转台。
9、伺服关断(Servo Off)用PMC信号将进给伺服轴的电源关断,使其脱离C的控制,用手可以自由移动。
但是C仍然实时地监视该轴的实际位置。
该功能可用于在C机床上用机械手轮控制工作台的移动,或工作台、转台被机械夹紧时以避免进给电动机发生过流。
FANUC0I-TD
FANUC 0-TD 系统编程参考手册FANUC 0-TD系统编程参考手册坐标系统程序原点在程序开发开始之前必须决定坐标系和程序的原点。
通常把程序原点确定为便于程序开发和加工的点。
在多数情况下,把Z 轴与X 轴的交点设置为程序原点坐标原点1. 机床坐标系统这个坐标系统用一个固定的机床的点作为其原点。
在执行返回原点操作时,机床移动到此机床原点。
2. 绝对坐标系统用户能够可建立此坐标系统。
它的原点可以设置在任意位置,而它的原点以机床坐标值显示。
3. 相对坐标系统这个坐标系统把当前的机床位置当作原点,在此需要以相对值指定机床位置时使用。
4. 剩余移动距离此功能不属于坐标系。
它仅仅显示移动命令发出后目的位置与当前机床位置之间的距离。
仅当各个轴的剩余距离都为零时,这个移动命令才完成。
设置坐标系开发程序首先要决定坐标系。
程序原点与刀具起点之间的关系构成坐标系;这个关系应当随着程序的执行输入给NC 机床,这个过程能够用G50 命令来实现。
在切削进程开始时,刀具应当在指定的位置;由于上面所述设置原点的过程已经完成,工件坐标系和刀具起始位置就定了;刀具更换也在这个被叫为起点的位置操作。
绝对/增量坐标系编程NC 车床有两个控制轴;对这种2 轴系统有两种编程方法:绝对坐标命令方法和增量坐标命令方法。
此外,这些方法能够被结合在一个指令里。
对于X 轴和Z 轴寻址所要求的增量指令是U 和W。
①绝对坐标程序---X40.Z5.;②增量坐标程序---U20.W-40.;③混合坐标程序---X40.W-40.;G 代码命令代码组及其含义“模态代码”和“一般”代码“形式代码”的功能在它被执行后会继续维持,而“一般代码”仅仅在收到该命令时起作用。
定义移动的代码通常是“模态代码”,像直线、圆弧和循环代码。
反之,像原点返回代码就叫“一般代码”。
每一个代码都归属其各自的代码组。
在“模态代码”里,当前的代码会被加载的同组代码替换。
代码解释G00 定位1. 格式G00 X_ Z_这个命令把刀具从当前位置移动到命令指定的位置(在绝对坐标方式下),或者移动到某个距离处(在增量坐标方式下)。
FANUC 0TD数控系统
FANUC 0TD数控系统操作在“视图”下拉菜单或者浮动菜单中选择“控制面板切换”后,数控系统操作键盘会出现在视窗的右上角,其左侧为数控系统显示屏,如下图所示。
用操作键盘结合显示屏可以进行数控系统操作。
数字/字母键数字/字母键用于输入数据到输入区域(如下图所示),系统自动判别取字母还是取数字。
键的输入顺序是:K→J→I→K•••循环。
编辑键替代键。
用输入的数据替代光标所在的数据。
删除键。
删除光标所在的数据;或者删除一个数控程序或者删除全部数控程序。
插入键。
把输入域之中的数据插入到当前光标之后的位置。
修改键。
消除输入域内的数据。
回撤换行键。
结束一行程序的输入并且换行。
页面切换键数控程序显示与编辑页面。
位置显示页面。
位置显示有三种方式,用PAGE按钮选择。
参数输入页面。
按第一次进入坐标系设置页面,按第二次进入刀具补偿参数页面。
进入不同的页面以后,用PAGE 按钮切换。
翻页按钮(PAGE)向下或向上翻页。
光标移动(CURSOR)向下或向上移动光标。
输入键输入键。
把输入域内的数据输入参数页面或者输入一个外部的数控程序。
输出键输出键。
把当前数控程序输出到计算机。
手动操作虚拟数控铣床回参考点*置模式旋钮在“HOME”位置*选择各轴,按住按钮,即回参考点.移动手动移动机床的方法有三种:方法一: 连续移动。
这种方法用于较长距离的台面移动。
(1) 置模式旋钮在“JOG”位置:(2) 选择各轴,按方向钮,按住按钮机床台面运动,松开后停止运动。
(3) 用旋钮调节移动速度。
方法二: 点动(JOG),这种方法用于微量调整,如用在对基准操作中。
(1) 置模式旋钮在“JOG INC”位置:(2) 选择各轴,按按钮,每按一次,台面移动一步。
(3) 用单步进给量控制旋钮调节每一步移动距离。
方法三: 操纵“手脉”(MPG),这种方法用于微量调整。
在实际生产中,使用手脉可以让操作者容易调整自己的工作位置。
(1) 置模式旋钮在“MPG”位置:(2) 把光标置于“手轮”之上,按住鼠标旋转,松开鼠标键停止机床移动。
FANUC0i-D数控系统基本连接
实验三FANUC Oi-D 数控系统基本连接一.实验目的1.了解数控系统的各基本单元。
2.了解数控系统的硬件连接。
二.实验内容1.FANUC 0i MateD 数控系统基本组成与连接。
2.电气图形符号、部件功能。
3.电气控制原理与对应的操作过程。
三.实验设备1.FANUC 0i Mate-TD 数控车床。
2.万用表、十字/ 一字螺丝刀(中、小型各一套)四.实验要点1.数控车系统组成、电气关系。
2.数控车床伺服控制系统的组成与连接。
3.机床各电气控制部件实体与电气图形符号对应关系等。
五.实验具体要求1.在进行实物识别时,最好不要给机床及数控系统上电。
只有在需要验证控制过程及各控制部件的响应状态时,才给机床和系统上电,并告知小组其他同学,此时不要触碰任何电气控制部件,避免意外触电。
2.对机床进行基本操作,观察与验证各控制部件的工作过程与状态。
六.相关知识与技能FANUC Oi-D 系统可控制4个进给轴和一个伺服主轴(或变频主轴)。
它包括基本控制单元、伺服放大器、伺服电机等。
FANUC 0i Mate-D 系统可控制3个进给轴和1个伺服主轴(或变频主轴)。
它包括基本控制单元、伺服放大器、伺服电机和外置I/O 模块。
1. FANUC 0i Mate TD 数控 车实训 电控柜上图为Oi-MD 系统控制单元背板连接布置图,各连接器接口作2.FANUC 0i D/0i Mate D 控制单元接口图LU电航:电n2捜制离就t : K - '■買训按拙・} .inttrF.f!&HFU3W氓元背面F*M IlyrJD36B JMO JD3CA JDS IAI *T ICOP10A (COPIOA^WK!制卡上的连揍臥】电池用见下表:3.FANUC Oi/Oi MateD 整个系统间的部件连接s坦<丄舌pg)04 目K□一¥R S忖一瓷口=怜p o sl ?o -^t s L 3ku B s > mPDEA4.二F:;op ・ >rrHFnNrrv-︱q.z吕S K<■□□^官<?E f iCI T5-EU 2占云ff a-PT23WC目«•^s s >s»*>aSM 举4MJg wu io w_3UAo 首<害4it£8811A— co p -c m■■l l■u pdl M 8P 畐2c o pw KCP二OOP1UCINE¥t-n-8sW OM S S・工3■亠V-Irejt﹄亠・*代:1・︱l-rm.~l肓匕直trlK BI ffl舍 Ic卫.2JMCCJMD3f i s亠-r■■SJa^TS4FANUCU0匚NK毎淋so i M a CD田_IForSaieiQFs?-■O U 37K S - 5Jn 7﹂-I0 --□L-DG-£一«so wf fs ^—c s3I-I U W J --!..匚K n ^5.系统电源的接通顺序Corrlroll unit Servo amplifier按如下顺序接通各单元的电源或全部同时接通。
FANUC0—TD系统数控车床编程指令
数控车中级培训流程及实例
一、数控入门学习
1、FANUC0—TD系统数控车床编程指令
1)M指令
2)F 、T 、S指令
a)F指令(进给功能)
F功能是表示进给速度,进给速度是用字母F和其后面的若干数字来表示的。
G98:每分钟进给(mm/min)
G99:每转进给(r/min)
b)T指令(刀具功能)
刀具功能是表示换刀功能,它由字母T和其后的四位数字表示。
其中前面两位为刀具号,后两位为刀具补偿号。
(T0x0y)每一刀具加工结束后,必须取消其刀具补偿,即用“00”补偿号取消补偿功能。
c)S指令(主轴功能)
主轴功能主要是表示主轴旋转速度,它由S和其后的数字组成。
例如,S600表示主轴转速600r/min。
3)G 指令(准备功能)
三、设备,刀具,材料,资料
设备:CK6136i
刀具:90外圆车刀,35度机夹刀,外割刀,外螺纹刀。
材料:45号钢,铝
参考书:数控机床操作工(中/高级)----------------------中国劳动社会保障出版社
浙江大学现代制造工程研究所尤国军
www.zjucnc.co m。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Fanuc 0-TD系统参数传输设定和方法
使用定制传输电缆,该接口位于MEMORYPCB板底部M5口(原厂定义为阅读穿孔机)在H2-077操作面板有一24针并口可用于加工程式导入导出,也是和M5口相通的。
在传输前先要确认接口用参数号P002、P0522、P0553是否正确
N0002 P 00000001
最低位 STP2 1:停止位设为2位
9 2400
10 4800
11 9600
用PC输入参数的步骤如下:
1、选择MDI方式(操作面板模式选择开关)
2、在PARAMETER的SETTING2中设置PWE=1(CRT /MDI操作面板)
3、选择EDIT方式/按下急停
4、选择PARAM(CRT /MDI操作面板)
5、按下INPUT键
6、PC端打开PCIN软件,选择DATE OUT 文件路径c:\DATEP Y/N?按Y 显示传
输字节数
7、传输完毕选择MDI方式
4、
程序输入 EDIT/AUTO方式 PRGRM INPUT
参数输出 EDIT方式 PARAM START/OUTPUT
偏置输出 EDIT方式 OFSET START/OUTPUT
全部程序输出 EDIT/AUTO方式 PRGRM O9999 START/OUTPUT。