EXATA 5.4源码下载调试
ESA数控折弯系统S540550中文操作手册v
1.3.1 要绘制的上模 ................................................................................................... 1.9
1.3.2 预设上模
...................................................................................................1.14
1.4如何输入一个新的上模 .....................................................................................................1.15 1.4.1 要绘制的下模............................. ........................................................................1.17 1.4.2 预设下模 ..........................................................................................................1.24
2.11.2 如何使用校正系数 ................................ .........................................................2.35
2.12 半自动模式校正 ................................ ..........................................................................2.36
ADXL345程序。(amoBBS阿莫电子论坛)
ADXL345程序。
(amoBBS阿莫电子论坛)之前是用C8051F340来驱动这个ADXL345的。
没问题。
现在想把这个程序移植到STM32上。
可是就是不行。
/**************************************起始信号**************************************/void Start(void){SDA_OUT();Set_IIC_SDA; //拉高数据线Set_IIC_SCL; //拉高时钟线Delay5us(); //延时Clr_IIC_SDA; //产生下降沿Delay5us(); //延时Clr_IIC_SCL; //拉低时钟线}/**************************************停止信号**************************************/void Stop(void){SDA_OUT();Clr_IIC_SDA; //拉低数据线Set_IIC_SCL; //拉高时钟线Delay5us(); //延时Set_IIC_SDA; //产生上升沿Delay5us(); //延时}/**************************************发送应答信号入口参数:ack (0:ACK 1:NAK)**************************************/ void SendACK(unsigned char ack){SDA_OUT();if(ack){Set_IIC_SDA; //写应答信号}else{Clr_IIC_SDA;}Set_IIC_SCL; //拉高时钟线Delay5us(); //延时Clr_IIC_SCL; //拉低时钟线Delay5us(); //延时}/**************************************接收应答信号**************************************/ unsigned char RecvACK(void){unsigned char CY;SDA_IN();Set_IIC_SCL; //拉高时钟线Delay5us(); //延时CY = READ_SDA; //读应答信号Clr_IIC_SCL; //拉低时钟线Delay5us(); //延时return CY;}/************************************** 向IIC总线发送一个字节数据**************************************/ void SendByte(BYTE dat){BYTE i;SDA_OUT();for (i=0; i<8; i++) //8位计数器{dat <<= 1; //移出数据的最高位if(dat&0x80){Set_IIC_SDA;} //送数据口else{Clr_IIC_SDA;}Set_IIC_SCL; //拉高时钟线Delay5us(); //延时Clr_IIC_SCL; //拉低时钟线Delay5us(); //延时}RecvACK();}/************************************** 从IIC总线接收一个字节数据**************************************/ BYTE RecvByte(){BYTE i;BYTE dat = 0;SDA_OUT();Set_IIC_SDA; //使能内部上拉,准备读取数据,SDA_IN();for (i=0; i<8; i++) //8位计数器{dat <<= 1;Set_IIC_SCL; //拉高时钟线Delay5us(); //延时dat |= READ_SDA; //读数据Clr_IIC_SCL; //拉低时钟线Delay5us(); //延时}return dat;}//******单字节写入******************************************* void Single_Write(unsigned char REG_Address,unsigned char REG_data,unsigned char SlaveAddress){Start(); //起始信号SendByte(SlaveAddress); //发送设备地址+写信号SendByte(REG_Address); //内部寄存器地址,请参考中文pdf22页SendByte(REG_data); //内部寄存器数据,请参考中文pdf22页Stop(); //发送停止信号}//********单字节读取***************************************** //uchar Single_Read(uchar REG_Address,uchar SlaveAddress) //{ uchar REG_data;// Start(); //起始信号// SendByte(SlaveAddress); //发送设备地址+写信号// SendByte(REG_Address); //发送存储单元地址,从0开始// Start(); //起始信号// SendByte(SlaveAddress+1); //发送设备地址+读信号// REG_data=RecvByte(); //读出寄存器数据// SendACK(1);// Stop(); //停止信号// return REG_data;//}//*********************************************************////连续读出ADXL345内部加速度数据,地址范围0x32~0x37////*********************************************************void Multiple_read(unsigned char SlaveAddress){unsigned char i;Start(); //起始信号SendByte(SlaveAddress); //发送设备地址+写信号if(SlaveAddress==ADXL345_SlaveAddress){SendByte(0x32); //发送存储单元地址,从0x32开始}else{SendByte(0x03);}Start(); //起始信号SendByte(SlaveAddress+1); //发送设备地址+读信号for (i=0; i<6; i++) //连续读取6个地址数据,存储中BUF{BUF[i] = RecvByte(); //BUF[0]存储0x32地址中的数据if (i == 5){SendACK(1); //最后一个数据需要回NOACK}else{SendACK(0); //回应ACK}}Stop(); //停止信号Delay5ms();}//************************************************************* ****//初始化ADXL345,根据需要请参考pdf进行修改************************void Init_ADXL345(){Single_Write(0x31,0x0b,ADXL345_SlaveAddress); //测量范围,正负16g,13位模式Single_Write(0x2C,0x08,ADXL345_SlaveAddress); //速率设定为12.5 参考pdf13页Single_Write(0x2D,0x08,ADXL345_SlaveAddress); //选择电源模式参考pdf24页Single_Write(0x2E,0x80,ADXL345_SlaveAddress); //使能DATA_READY 中断Single_Write(0x1E,0x00,ADXL345_SlaveAddress); //X 偏移量根据测试传感器的状态写入pdf29页Single_Write(0x1F,0x00,ADXL345_SlaveAddress); //Y 偏移量根据测试传感器的状态写入pdf29页Single_Write(0x20,0x05,ADXL345_SlaveAddress); //Z 偏移量根据测试传感器的状态写入pdf29页}。
飞马5214伪马电控JS5A0中英文安装使用说明书V1.1
JS-5A0全自动工业缝纫机伺服控制器AUOMATIC INDUSTRIAL SEWING MACHINE SERVO CONTROLLER安装使用说明INSTRUCTION MANUAL BOOK前言感谢您选用本公司的工业缝纫机伺服控制器。
本手册提供了使用该系统所需知识及注意事项。
l为了您更好地使用该产品,有使用之前请仔细阅读本手册。
您在使用中若有任何疑问或对我们的产品和服务有任何意见,请随时与我们联系。
主要技术数据供电电压范围:单相AC200V~AC240V±10%供电电源频率:50Hz/60Hz整机最大功率:700W电机额定功率:550W电机额定转速:6000rpm电机额定扭矩:0.6 N·m电机最大扭矩:1.8 N·m目录1 安全注意事项.........................................................................................................................- 1 -1.1 使用范围......................................................................................................................- 1 -1.2 工作环境:..................................................................................................................- 1 -1.3 注意事项......................................................................................................................- 1 -1.4 保养维修......................................................................................................................- 1 -1.5 危险提示......................................................................................................................- 1 -1.6 接线与接地..................................................................................................................- 2 -1.7 其它安全规定..............................................................................................................- 3 -2. 脚踏速控器前后踏力量的调整.............................................................................................- 3 -3. 操作面板说明........................................................................................................................- 4 -3.1基本框图.......................................................................................................................- 4 -3.2按键定义.......................................................................................................................- 4 -3.3按键操作.......................................................................................................................- 6 -3.4基本功能.......................................................................................................................- 8 -3.5指示灯...........................................................................................................................- 9 -3.6界面显示.....................................................................................................................- 10 -4. 参数说明..............................................................................................................................- 11 -4.1 包缝参数表(一区U)................................................................................................- 11 -4.2 包缝参数表(二区U.)...............................................................................................- 15 -4.3 工艺参数表................................................................................................................- 16 -5. 故障分析..............................................................................................................................- 18 -5.1 故障表........................................................................................................................- 18 -6. 接口及接线图......................................................................................................................- 20 -6.1接口板连接线及接口图(附图)..............................................................................- 20 - JIJU布边传感器.......................................................................................................................- 21 -7.1JIJU布边传感器外形..................................................................................................- 21 -1 安全注意事项1.1 使用范围本伺服控制器及其电机是专为工业缝纫机开发设计的,如果在其它方面使用,请注意使用者的安全。
5400调试手册
K 604504en-02 12 K 604504en-02K 604504en-02 34 K 604504en-02K 604504en-02 56 K 604504en-02K 604504en-02 78 K 604504en-02K 604504en-02 9+FU 变频器+MR 机房+NG 电源供应单元+S 井道+T 门2. 总的系统图2.1 电梯控制系统概览图K 604504en-02 112.2 串行或并行元件串行-并行元件2.3 串行和并行接口2.4 带闭环控制系统的同步电机带同步电机的变频器2.5 有机房控制柜控制柜内各元件分布K 604504en-02 13位置名称描述1 基础印板ASIXA 基础模块带控制模块2 有机房控制柜供电有机房电源模块3 制动器制动控制模块4 选项增加的选项模块5 DM236 仅对意大利6 机房墙上电源外部带主开关的电源模块7 RMVE 风扇继电器模块2.6 安全回路安全回路是由24V..52V直流电压供给和控制。
它弥补了安全回路电压由于长距离电缆和氧化开关等造成的损失。
安全回路断开,直流电压是52V!安全回路接触器2.7 井道信息井道信息由下列两个元素组成:·井道绝对值编码信息AGSI·电磁或光电开关KUET元件两侧跨接开关和编码器图K 604504en-02 15齿型带长度[m]+N(附加齿的数量)F[kg](对应力)15 6 324 10 545 19 880 33 15 齿型带涨紧以后,执行下列步骤:·进行测量运行·有必要的话调节”Tacho Factor”转速因素·检查平层精度有必要的话调节一下3.带SMLCD的用户接口3.1MX用户接口上的开关和显示带SMLCD的用户接口图位置名称1 电压供应状态和门触发灯2 安全回路诊断显示灯K 604504en-02 173.2 SMLCD主菜单SLMCD主菜单位置描述1 LON/BIO状态软件下载/冻结闪“%”正在下载软件到LON/BIO结点中“?”需要对LON-或BIO结点冻结闪“?”正进行冻结命令闪“!”冻结没有成功“!”冻结后丢失或出现新的LON/BIO结点空白冻结结束并且LON/BIO结点没有改变2 控制状态(M=有控制,空白=没有控制)3 服务访问状态(如果”*”在闪说明服务访问激活)4 轿厢载重是额定载重的百分之多少5 梯名和梯号位置描述6 驱动状态0 驱动停止+ 驱动加速= 驱动在正常速度_ 驱动在减速F 驱动无效? 状态未知7 轿厢状态= 轿厢在门区并且停止# 轿厢停在门区外向上运行向下运行? 状态未知8 当前楼层所在值(1到n)9 运行控制状态(根据不同的错误情况显示不同的错误运行控制号码)10 显示在失电情况下轿厢在最近楼层的上面还是下面.最近楼层可以看位置8,如果轿厢停在门区,也可以看位置11。
4500韦伯触摸屏软件调试说明书
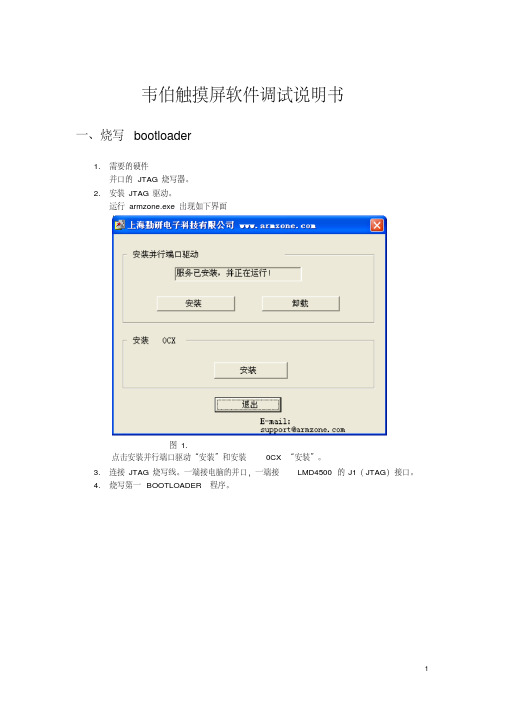
韦伯触摸屏软件调试说明书一、烧写bootloader1.需要的硬件并口的JTAG烧写器。
2.安装JTAG驱动。
运行armzone.exe 出现如下界面图1.点击安装并行端口驱动“安装”和安装0CX “安装”。
3.连接JTAG烧写线。
一端接电脑的并口,一端接LMD4500的J1(JTAG)接口。
4.烧写第一BOOTLOADER程序。
图25.点击nboot1st.bat.出现如下界面。
图3.注意红框的部分,如果和里面的内容不同,请检查驱动是否安装好。
JTAG线是否连接好,LMD4500 是否上电。
6.选择K9S1208 prog 即输入”0”。
出现下图界面。
图47.选择K9S1208 Program 即选择“0”.出现如下界面图58.输入block number 是“0“.出现如下界面图69.等烧写完之后出现如下界面。
图79.输入“2“结束第一个bootloader的烧写。
10.第二个bootloader的烧写。
运行“nboot2nd.bat “出现的界面如图 3.输入”0“之后出现图4界面。
再输入”0“之后出现图5界面。
此时要注意输入的block number 是”2“.然后出现图6界面。
烧写完成之后出现图7界面。
输入”2“结束烧写。
11.第三个bootloader的烧写。
运行“QT2440_Amon.bat “出现的界面如图 3.输入”0“之后出现图4界面。
再输入”0“之后出现图5界面。
此时要注意输入的block number 是”8“.然后出现图6界面。
烧写完成之后出现图7界面。
输入”2“结束烧写。
二、烧写NK1.运行DNW .出现如下界面:图1.2.连接串口线,一端接电脑的串口,一端接板子的P3.点击Serial Port 菜单的connect,出现如下界面图2.3.板子上电后,在DNW界面中出现“*”后输入“u”。
图3.图4.4.插入USB线,后按空格键,出现如下界面。
图5.5.选择1,按回车后界面如下:图6.6.选择USB Port—>Transmit ,找到nk.nb0。
新手必读教材,亚拓450组装到调试全套图文详细讲解

亚拓450从零安装调试到完工,新手必读教材,全套图文详细讲解T REX 450 SE-组装方式/调整/设定参考第1步:首先将机身固定柱和主轴固定座及电池固定座左侧两颗螺丝拆下,方便服务器安装第2步:将第一颗服务器由内往外安装第3步:同样的由内往外安装第二颗服务器,并将讯号线排列整齐用速线带固定,切记,1.速线带头在机身内侧2.在固定于册版的地方用透明胶带包覆两圈,防止组装时讯号线破损第4步:将伺服机讯号线由内侧版经沟槽穿往机身外侧第5步,将服务器的讯号线整理后,再用蛇管包覆第6步:将机身固定柱和主轴固定座及电池固定座左侧两颗螺丝装回原来位置记得要上螺丝胶喔第7步:将中间的侧版固定柱套入,并对准螺丝孔.将马达固定座装上下侧版第8步:1.利用马达固定座将上.下侧版组合2.将中侧版固定柱锁上螺丝第9步:将服务器讯号线穿过上.下侧版并将左侧三颗螺丝锁上第10步:右侧版先锁上1的螺丝,其它两颗先不锁第11步:将所需的马达同齿固定后,在将马达固定在马达坐上第12步:将马达线穿过机身底板和组装好的脚架,并将脚架固定第13步:将皮带穿过尾管(注意皮带的方向性)并将尾服务器座套入尾管,然后跟机身组合,并将垂直/水平/支撑架装上,调整皮带的松紧度后上紧尾管固定座的螺丝第14步:金属尾传动轮座组固定前,需确认与尾管固定座呈平行状态第15步:陀螺仪的整线后用蛇管包覆第16步:将陀螺仪用双面胶固定在尾管固定座上后,将包覆好的讯号线穿过上.下侧版后再将右侧版的两颗螺丝上紧(陀螺仪安装在尾固定座的下方,以防炸机时被副翼打到)第17步:先抓出尾服务器的中点,并将球头固定在服务器的摆臂上(上下两个圈是行程终点),并将服务器固定在尾伺服座上第18步:装好尾服务器时,套上连杆后,注意,这是重点1,尾舵控制组需在尾主轴中央2.调整尾服务器座让连杆跟尾管平行3.尾服务器摆臂球头需在中点4. 尾连杆和尾管尽量跟尾管呈平行以上确定后在固定尾伺服座螺丝第19步:1.将主轴上的连杆按说明书上的长度组装,并套上摆臂平衡杆先量好两边相等长度后套入平衡杆重垂在装上平衡翼2.将主轴和机身组合第20步:组合好后请注意大齿盘于机身的间隙,不能摩擦到机身或尾传动轮第21步:调整马达铜齿的高度并将铜齿固定螺丝上紧,调整马达与大齿盘的间隙后再将马达固定螺丝上紧第22步:1.用2mm钻尾将欲锁球头的摆臂扩孔2.将球头利用螺母固定在摆臂上3.将多余的摆臂去掉.以免摆动时干涉4.将服务器连杆依说明书长度组装好第23步:将组装好的摆臂套上服务器,先不上服务器螺丝,以便调整时需拆下,此时连杆都是呈垂直状态第24步:接收的整理1.用热缩套管或由机的油管将接收线的前端包覆,以防接收线和侧版接触而出现干扰现象,相信很多人有这个经验2.用1mm的泡棉将接受包覆并用透明胶带在包覆,以防日久泡棉脱落,这可以防止摔机后的碰撞以以多一层的防干扰的作用第25步:1.用双面胶将接收固定在底板2.将讯号线接上接收第26步:1.用打火机熏烤将热缩套管定型你要的角度2.在用热缩套管将整理的接收线固定在线管上第27步:将电子变速器的讯号线穿过脚架和底板之间并接上接收(马达线先不要接,以便遥控器设定和调机)-----------------------------------以上是机械及电子部件的安装--------------------------第28步:控的设置,打开遥控器进入SWASH TYP,打开选项选择120度第29步:接上电池,将摆臂尽量以90度脚平行装上,并推油门游戏杆以确认伺服机的方向正确,如有反向,可进入REV.SW个别调整正确方向第30步:如摆臂有微些差距,可进入sub trim个别微调至所有摆臂至平行,调整好后记得看看十字盘是否平行,如没平行,调整十字盘连杆使起平行既可第31步:接下来先将主旋翼做好静态平衡后,装上直升机,并将服务器螺丝锁上第32步:进入遥控器选项里的PIT.CURV.1.并将油门游戏杆推至中点2.在NORM设定页面3.将EXP显至ON 的位置,这可以自行调整曲线较为顺畅第33步:已有贴配重贴纸的桨为主1.将螺距规套上,并以螺距规的上沿跟平衡杆呈平行2.此时应为0度,如没0度,可依差距大小调整连杆使其成为O度第34步:将油门游戏杆推至最高并记下为+11度第35步:将油门推至最低,并记下为-11度,对高手来说,这个螺距应该是可以的第36步:如想减少螺距行程,可进入swash mix的PIT降低%数(5%为一度左右),所以我降了10%,此时螺距为(-9 0 +9)这应该适合一般飞友第37步:接下来是在进入PIT. CURV设定NORM的螺距,第一点位置设定为-2度,此时数据为38%第38步:接着将油门游戏杆推至中点3的位置(约是停悬点),为+5度,此时该点数据为75%第39步:在来是将刚刚设定的38%和75%以及最高的100%三点中的曲线,设定调整一条顺畅的拋物线,这样一来,在操控的过程会顺畅许多,不会又高高低低的情况发生第40步:接下来进入THRO CHRV的NORM页面设定油门曲线,首先在第3点(中点)位置将数据设定为68%第41步:接下来是一般人常遇到也是最让你头痛的尾巴设定,如果你刚刚再组装的时候有按照图示安装,基本上尾服务器的中立点已经抓好了,所以不会有偏的问题发生,只要了解陀螺一的功能和调整就可以了,A.接上电源如果灯恒亮,就表示锁头模式,1数字/模拟的切换开关,如果你用的尾舵机不是数码的,必须将开关切至OFF的位置,如果是数码舵机择切换至ON的位置2.陀螺仪反向开关3.延迟开关,如果是数字服务器这个开关可以不用管他,在O的位置.如是用模拟服务器,感度以将很低仍有追踪现象,可调整此开关改善4.陀螺仪行程开关,如行程太大会产生操控尾舵时,定点会有抖几下的情况,可降低此行程来改善第42步:确认方向舵方向,通常尾舵控制组跟方向游戏杆是反方向移动,这才是正确的第43步:确认好后接下来进入遥控器GYRO SENS AUTO页面设定陀螺仪感度POS.0为一般飞行感度设定POS.1为3D飞行感度设定设定好感度后不要忘了也要进入由上角将POS.0和POS.1个别设定好如此一来,感度才会跟着你切换的飞行模式而改变第44步:设定好后,将电子变速器和马达的线依颜色接上,并将固定第45步:设定的过程中,有些飞友会利用这个页面调整服务器的行程,来达到所需的螺距,这是错误的,就算调整好了,+-数据不相等,这会产生打动作时,左右的速度不均现象第46步:还有一种错误的调整螺距的方式,如图示,降低/提高螺距曲线的%数来迎合所需的螺距,这也会让你在操控时,游戏杆上下不均匀,也缩短了螺距变化的空间,所谓一步错步步错!第47步:接下来是调整双桨,以量螺距的桨为机准桨(贴配重贴纸的桨),此桨不动视另一只桨高低作调整就可以了,完工!资料来源:亚拓台湾官网论坛编辑制作:5IMX之dtjj(欢迎传播,功德无量)。
Ver5.0调试软件功能简介及使用说明书
一、软件安装卸载说明 1.1 调试软件的安装
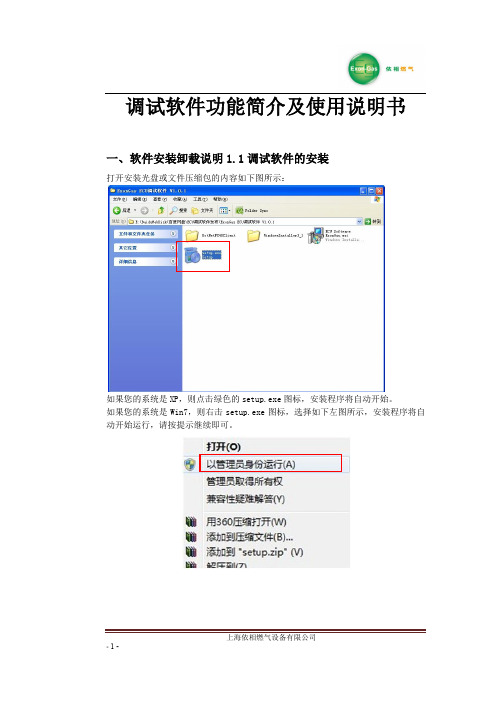
打开安装光盘或文件压缩包的内容如下图所示:
如果您的系统是 XP,则点击绿色的 setup.exe 图标,安装程序将自动开始。 如果您的系统是 Win7,则右击 setup.exe 图标,选择如下左图所示,安装程序将自 动开始运行,请按提示继续即可。
1.4L 1.6L 1.8L 2.0L 2.4L 3.0L 1.8T 2.0T
LPG
1.6 1.8 2.0 2.0 2.2 2.6 2.4 2.6
CNG
2.0 2.0 2.2 2.2 2.4 2.6 2.6 2.8
注释:
- 11 -
上海依相燃气设备有限公司
A:燃油时的喷油脉宽 B:燃气时的喷油脉宽 C:燃气时的喷气脉宽 C=全段比例×B+全段偏移 减压器压力和喷轨孔径按上述设定好后,开始调试,调试的步骤为:
缸序选择:选择正向时,即采集喷油信号一、二、三、四缸后,转化的喷气信号对 应一、二、三、四缸;选择反向时,即采集喷油信号一、二、三、四缸 后,转化的喷气信号对应四、三、二、一缸。
注:此选项请慎重更改,错误更改后有可能导致自动标定时发生非正常熄火,高速 滑行熄火、怠速不稳等情况;
- 10 -
上海依相燃气设备有限公司
第二步 燃气开环调试: 使发动机转速瞬间加到最高转速,加速瞬间听发动机声音是否发闷(正常情
况下是清脆的声音)最高转速是否和燃油一样(可对比燃油同工况下的现象),如果 加速瞬间发动机声音发闷,最高转速低于燃油最高转速,可以尝试把分段偏移的 10ms 以上的区间减小,再次试验看现象有无好转,如果效果不明显,可以尝试降低全段 比例的数值,再次试验,直至上述现象消失;
气脉宽(G.inj)、燃气温度(T.Gas)七个实时数据。 油气脉宽区:显示八个缸的油气脉宽(根据实际缸数而定,无信号则显示 0.0ms) 通讯指示灯:通讯指示灯蓝绿色交替闪烁,表示通讯成功
(分享)使用CCS5下载调试StarterWare例程代码的方法(1)

1分享如何使用CCS5下载调试StarterWare例程代码首先说明一下为什么需要了解或者学习StarterWare。
个人认为第一点是,StarterWare软件中包含有大量例程,均可查看源代码,在初期学习阶段,借助于StarterWare有助于深入了解AM335x的硬件(可为操作系统驱动程序打下一定基础);第二点就是StarterWare实时性好,使用简单,在不需要OS的场合有很大的价值。
我按照的版本是StarterWare_02_00_00_07,支持AM335x,包含有AM335x Starter Kit开发板的例程。
CCS版本是5.2,官方下载,连接Starter Kit无需破解(CCS识别到TI自家的仿真器或者开发板时,无需license)。
StarterWare所有例程的工程文件所在目录为:\AM335X_StarterWare_02_00_00_07\build\armv7a\cgt_ccs\am335x\evmskAM335x ;所有工程的*.c和*.h源文件所在的目录是:\AM335X_StarterWare_02_00_00_07\examples\evmskAM335x;使用CCS重新编译工程所生成的*.bin可执行文件和*.out下载文件目录是\AM335X_StarterWare_02_00_00_07\binary\armv7a\cgt_ccs\am335x\evmskAM335 x。
1.1 加载所有例程可以使用CCS5一次性加载所有的例程到当前workspace中,步骤如下:1,打开CCS5.2,点击主菜单File→Import…,弹出如下对话框,并选择其中的“Code Composer Studio →Existing CCS Eclipse Projects”,并点击下方的“Next”按钮。
2,点击上图中的“Next”按钮后,弹出如下对话框:按钮,选择目录如下图所示:并点击下方的“确定”按钮。