四轴飞行器的控制设计
四轴飞行器的稳定飞行控制技术

四轴飞行器的稳定飞行控制技术四轴飞行器(Quadcopter)是一种具有四个旋翼的无人机,通过调节四个旋翼的转速来实现飞行。
由于其稳定性和机动性优秀,四轴飞行器在航拍、物流配送、农业植保等领域得到广泛应用。
而为了实现四轴飞行器的稳定飞行,飞行控制技术起着至关重要的作用。
一、传感器与数据获取四轴飞行器的稳定飞行控制技术需要依赖高精度的传感器来获取飞行器的姿态信息和环境数据。
例如,加速度计用于测量飞行器的加速度,陀螺仪用于测量转动角速度,磁力计用于测量地磁场,气压计用于测量飞行高度等等。
这些传感器通过称为“惯性测量单元(IMU)”的模块来集成,为飞行控制系统提供准确的数据。
二、飞行控制算法与姿态控制四轴飞行器的稳定飞行控制技术需要依靠精确的飞行控制算法来实现姿态控制。
常用的控制算法包括PID控制(比例、积分、微分控制)、模型预测控制以及自适应控制等。
PID控制通过调节旋翼转速,根据飞行器当前状态与期望状态之间的误差来实现姿态调整。
模型预测控制利用数学模型预测飞行器的未来响应,从而实现更加精确的控制。
自适应控制系统可以自动调整控制参数以适应各种环境条件和飞行状态。
三、飞行控制器与实时控制飞行控制器是四轴飞行器的核心部件,负责接收传感器数据、进行姿态控制算法运算,并输出控制指令。
目前市面上常用的飞行控制器主要有基于开源飞控软件的,如基于ArduPilot的Pixhawk飞控,以及基于Betaflight的F4 V3飞控等。
这些飞行控制器采用高性能的处理器和实时操作系统,能够实现稳定飞行控制算法的即时计算和输出。
同时,飞行控制器还提供与遥控器的通信接口,使得飞行器的遥控操作变得简单方便。
四、传输系统与遥控操作四轴飞行器的稳定飞行控制技术还需要借助传输系统来与地面站或遥控器进行通信。
常用的通信方式包括无线电遥控、蓝牙、Wi-Fi和4G等。
通过传输系统,飞行控制器可以接收来自地面站或遥控器的指令,反馈飞行器的飞行状态及其他数据,并实现相应的姿态调整。
采用STM32设计的四轴飞行器飞控系统

采用STM32设计的四轴飞行器飞控系统四轴飞行器飞控系统是一种应用于四轴飞行器上的关键控制设备。
它包括硬件和软件两个部分,用于控制飞行器的姿态、稳定性和导航等功能。
其中,采用STM32设计的四轴飞行器飞控系统因其高性能、低功耗和丰富的外设资源而受到广泛关注。
一、硬件设计:1.处理器模块:采用STM32系列微控制器作为处理核心。
STM32系列微控制器具有较高的计算能力和丰富的外设资源,能够满足飞行控制的计算需求。
2.传感器模块:包括加速度计、陀螺仪、磁力计和气压计等传感器。
加速度计用于测量飞行器的线性加速度,陀螺仪用于测量飞行器的角速度,磁力计用于测量飞行器的方向,气压计用于测量飞行器的高度。
3.无线通信模块:采用无线通信模块,如蓝牙、Wi-Fi或者无线射频模块,用于与地面站进行通信,实现飞行参数的传输和遥控指令的接收。
4.电源管理模块:对飞行器的电源进行管理,确保各个模块的正常运行。
包括电池管理、电量检测和电源开关等功能。
5.输出控制模块:用于控制飞行器的电机、舵机等执行机构,实现对飞行器的姿态和动作的控制。
二、软件设计:1.飞行控制程序:运行在STM32微控制器上的程序,用于实时读取传感器数据、运算控制算法、输出控制信号。
该程序包括姿态解算、飞行控制和导航等模块。
-姿态解算模块:根据加速度计、陀螺仪和磁力计等传感器数据,估计飞行器的姿态信息,如俯仰角、横滚角和偏航角。
-飞行控制模块:根据姿态信息和目标控制指令,计算出电机和舵机的控制信号,保证飞行器的稳定性和灵敏度。
-导航模块:利用GPS等导航设备获取飞行器的位置和速度信息,实现自动驾驶功能。
2.地面站程序:在地面计算机上运行的程序,与飞行器的无线通信模块进行数据交互。
地面站程序可以实时监测飞行器的状态和参数,并发送控制指令给飞行器。
总结:采用STM32设计的四轴飞行器飞控系统是一种高性能、低功耗的控制设备,包括硬件和软件两个部分。
硬件包括处理器模块、传感器模块、无线通信模块、电源管理模块和输出控制模块。
四轴飞行器设计概述

四轴飞行器设计概述四轴飞行器(Quadcopter)是一种多旋翼飞行器,由四个电动马达驱动,并通过电子系统控制飞行。
它具有垂直起降、悬停、平稳飞行等优点,广泛应用于无人机航拍、物流配送、农业植保等领域。
本文将对四轴飞行器的设计概述进行详细介绍。
第一部分:概述四轴飞行器的设计涉及到机械结构设计、电子系统设计和飞行控制算法设计等方面。
在机械结构设计中,需要考虑到飞行器的重量、稳定性和飞行效率等因素;在电子系统设计中,需要考虑到电机驱动、传感器测量和通信等因素;在飞行控制算法设计中,则需要考虑到姿态控制、导航定位和自主避障等因素。
第二部分:机械结构设计四轴飞行器的机械结构主要包括机体、四个电动马达和螺旋桨等部分。
机体通常采用轻质材料制造,如碳纤维复合材料,以降低飞行器的重量;电动马达通常采用无刷电机,以提高功率输出和效率;螺旋桨通常采用塑料或碳纤维材料制造,以提供升力。
此外,机械结构设计还需要考虑到四轴飞行器的重心位置和稳定性,通过调整电动马达和螺旋桨的布局来实现。
第三部分:电子系统设计四轴飞行器的电子系统设计主要包括电机驱动、传感器测量和通信等模块。
电机驱动模块用于控制电动马达的转速和方向,通常通过电调与飞控板连接;传感器测量模块用于测量飞行器的姿态、加速度、陀螺仪等参数,通常包括陀螺仪、加速度计和磁力计等;通信模块用于与地面控制台进行数据传输和指令接收,通常采用无线通信技术,如蓝牙或Wi-Fi等。
第四部分:飞行控制算法设计四轴飞行器的飞行控制算法设计主要包括姿态控制、导航定位和自主避障等模块。
姿态控制模块用于控制飞行器的姿态,通常采用PID控制算法,通过调节电动马达转速来实现;导航定位模块用于确定飞行器的位置和航向,通常采用GPS和惯性导航系统等;自主避障模块用于识别和规避障碍物,通常采用机器视觉技术和激光雷达等。
第五部分:总结四轴飞行器设计的关键环节包括机械结构设计、电子系统设计和飞行控制算法设计等。
四轴飞行控制原理
四轴飞行控制原理四轴飞行器是一种具有四个旋翼的飞行器,通过控制旋转速度和方向来实现飞行。
其控制原理包括传感器感知、飞行动力学建模、控制器设计和电机控制。
1.传感器感知四轴飞行器通常配备有陀螺仪、加速度计、磁力计和气压计等传感器。
陀螺仪用于测量飞行器的角速度,加速度计用于测量线性加速度,磁力计用于测量地磁场方向,气压计用于测量飞行器的高度。
这些传感器可以提供飞行器在空间中的姿态、位置和速度等信息。
2.飞行动力学建模通过传感器测量的数据,可以对飞行器的姿态进行估计。
姿态估计主要包括姿态角(滚转、俯仰和偏航)的估计和位置的估计。
将姿态和位置的估计值与期望值进行比较,可以得到姿态和位置的误差。
飞行动力学建模主要包括飞行器的动力学方程和状态方程,可以通过这些方程来描述飞行器的姿态、位置和速度等动态变化。
3.控制器设计控制器设计主要是设计一个控制算法来根据传感器测量的数据和期望的姿态和位置来控制飞行器的旋转速度和方向。
通常使用的控制算法包括PID控制器、模型预测控制器、自适应控制器等。
PID控制器是一种常用的控制算法,根据误差的大小和变化率来调整控制信号,从而使飞行器逐渐接近期望的姿态和位置。
4.电机控制四轴飞行器通常使用四个无刷电机来控制旋翼的转速和方向。
通过适当调整电机的转速,可以使飞行器产生所需的推力和力矩,从而实现期望的运动。
电机控制主要包括PWM控制信号的生成、电机转速的调节和电机的航向控制。
PWM控制信号的生成由控制器完成,根据控制器的输出调整电机转速,使旋翼产生所需的推力和力矩。
电机的航向控制通常通过改变电机的转速来实现。
总结:四轴飞行控制原理主要包括传感器感知、飞行动力学建模、控制器设计和电机控制。
通过传感器感知飞行器的角速度、线性加速度、地磁场方向和高度等信息,通过飞行动力学建模估计飞行器的姿态和位置,根据期望的姿态和位置与估计值的误差,设计控制算法来控制飞行器的旋转速度和方向,通过调整电机的转速,使飞行器产生所需的推力和力矩,从而实现期望的飞行。
四轴飞行器控制原理简单介绍
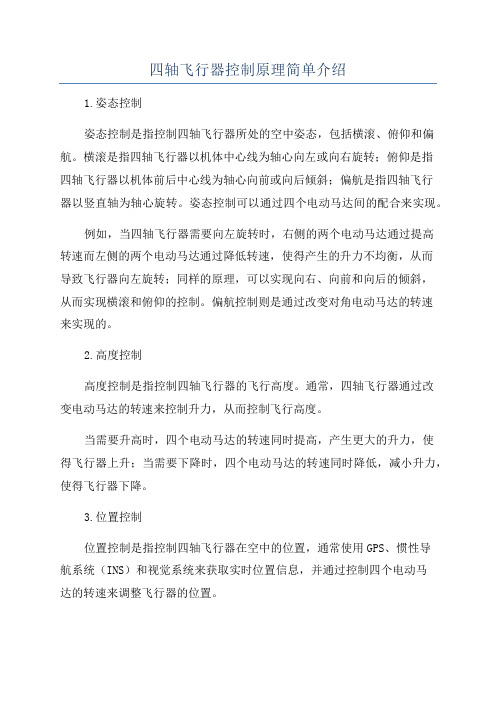
四轴飞行器控制原理简单介绍1.姿态控制姿态控制是指控制四轴飞行器所处的空中姿态,包括横滚、俯仰和偏航。
横滚是指四轴飞行器以机体中心线为轴心向左或向右旋转;俯仰是指四轴飞行器以机体前后中心线为轴心向前或向后倾斜;偏航是指四轴飞行器以竖直轴为轴心旋转。
姿态控制可以通过四个电动马达间的配合来实现。
例如,当四轴飞行器需要向左旋转时,右侧的两个电动马达通过提高转速而左侧的两个电动马达通过降低转速,使得产生的升力不均衡,从而导致飞行器向左旋转;同样的原理,可以实现向右、向前和向后的倾斜,从而实现横滚和俯仰的控制。
偏航控制则是通过改变对角电动马达的转速来实现的。
2.高度控制高度控制是指控制四轴飞行器的飞行高度。
通常,四轴飞行器通过改变电动马达的转速来控制升力,从而控制飞行高度。
当需要升高时,四个电动马达的转速同时提高,产生更大的升力,使得飞行器上升;当需要下降时,四个电动马达的转速同时降低,减小升力,使得飞行器下降。
3.位置控制位置控制是指控制四轴飞行器在空中的位置,通常使用GPS、惯性导航系统(INS)和视觉系统来获取实时位置信息,并通过控制四个电动马达的转速来调整飞行器的位置。
位置控制通常采用反馈控制的方法,在测量到的当前位置与目标位置之间存在偏差时,通过调整电动马达的转速来减小偏差,并使飞行器逐渐趋向于目标位置。
综上所述,四轴飞行器的控制原理涉及到姿态控制、高度控制和位置控制三个方面。
通过控制四个电动马达的转速来实现姿态控制和高度控制,通过GPS、INS和视觉系统来获取位置信息,并通过反馈控制来调整飞行器的位置。
这些控制原理的运用使得四轴飞行器能够实现精准、稳定的飞行。
四轴飞行器姿态控制算法

四轴飞行器姿态控制算法四轴飞行器姿态控制是指通过调整四个电机的转速,使得飞行器能够保持所需的姿态,例如平稳飞行、转弯、盘旋等。
姿态控制算法主要包括传感器采集、姿态估计和控制指令生成等几个部分。
以下将详细介绍四轴飞行器姿态控制的算法原理。
1.传感器采集:四轴飞行器通常会配备三个主要的传感器:加速度计、陀螺仪和磁力计。
加速度计用于测量飞行器的重力加速度,陀螺仪用于测量飞行器的角速度,磁力计用于测量地磁场强度。
这些传感器的数据将用于后续的姿态估计和控制。
2.姿态估计:姿态估计是根据传感器提供的数据计算出飞行器的当前姿态角。
一种常用的姿态估计方法是互补滤波器。
互补滤波器将加速度计和陀螺仪的数据进行融合,通过加速度计估计出的姿态角和陀螺仪估计出的姿态角进行加权平均,从而得到更准确的姿态估计。
3.控制指令生成:姿态控制器的目标是生成适当的转速指令,使得飞行器能够达到所需的姿态。
在四轴飞行器中,姿态控制通常分为俯仰控制、滚转控制和偏航控制三个方向。
俯仰控制用于调整飞行器的前后倾斜角度,滚转控制用于调整飞行器的左右倾斜角度,偏航控制用于调整飞行器的旋转角度。
在控制指令生成中,通常会采用PID控制器。
PID控制器根据目标姿态角和当前姿态角的误差,计算出相应的控制指令。
PID控制器包括三个参数:比例项、积分项和微分项。
比例项用于快速响应误差,积分项用于消除稳态误差,微分项用于抑制系统的振荡。
通过将三个方向的控制指令进行线性叠加,得到最终的转速指令。
转速指令将被发送到四个电机,控制它们的转速,从而实现飞行器的姿态调整。
值得注意的是,四轴飞行器还需要考虑到动力学和非线性因素。
动力学因素包括电机的动态响应和旋转惯量的影响,通常会使用动态模型进行补偿。
非线性因素包括旋翼的非线性动力学和空气动力学特性的影响,通常会采用非线性控制器进行补偿。
综上所述,四轴飞行器姿态控制算法主要包括传感器采集、姿态估计和控制指令生成等几个部分。
四轴飞行器姿态控制系统设计_刘峰
控制技术计算机测量与控制.2011.19(3) Com puter Measurement &C ontrol ·583·收稿日期:2010-07-05; 修回日期:2010-08-15。
作者简介:刘 峰(1987-),男,江西吉安人,在读硕士研究生,主要从事无人机控制技术方向的研究。
吕 强(1963-),男,博士生导师,主要从事机器人控制技术方向的研究。
文章编号:1671-4598(2011)03-0583-03 中图分类号:TP249文献标识码:A四轴飞行器姿态控制系统设计刘 峰,吕 强,王国胜,王东来(装甲兵工程学院控制工程系,北京 100072)摘要:四轴飞行器具有不稳定、非线性、强耦合等特性,姿态控制是四轴飞行器飞行控制系统的核心;通过分析四轴飞行器的飞行原理,根据其数学模型和系统的功能要求,设计了四轴飞行器的姿态控制系统;该系统采用stm32系列32位处理器作为主控制器,使用ADIS16355惯性测量单元等传感器用于姿态信息检测;系统基于模块化设计的思想,各传感器都使用数字接口进行数据交换,结构简单;使用PID 控制算法进行姿态角的闭环控制,实验结果表明,飞行器能较好的稳定在实验平台上,系统满足四轴飞行器室内飞行姿态控制的要求。
关键词:四轴飞行器;姿态控制;ST M 32Design of Attitude Control System for Q uadrotorLiu Feng ,Lv Qiang ,Wang Guo sheng ,Wang Donglai(Depar tme nt o f Co ntrol Eng ineering ,A cademy of A rmo red Fo rce Enginee ring ,Beijing 100072,China )Abstract :Quadrotor is a complex sy stem with instability ,nonlin ear and high coupling .The attitude control s ystem is the key of quadro -tor .Th e flight theory of qu adrotor is analyzed firs tly .Based on th e math ematical m odel and fligh t control requirement ,the attitu de control system of quadrotor is p roposed .A 32bits microp roces sor of S TM 32series is u sed as th e main p roces sor .The ADIS16355initial m easu re -ment unit and oth er sensors are used for attitude information detection .Based on the m odu larized des ign m ethod ,all th e sensors poss es s of digital interfaces ,w hich are simple and easy to commu nicate w ith th e m ain processor .The PID control method w as u sed for attitu de control -ling .The test results show that the qu adrotor is flyin g s table on the test bed and the sy stem is capab le of indoor attitude con trolling .Key words :quadrotor ;attitu de control ;ST M 320 引言四轴飞行器是一种具有4个对称旋翼的直升机,具有垂直起降、结构简单、操纵方便及机动灵活等优点。
四轴飞行器原理、设计与控制
四轴飞行器原理、设计与控制四轴飞行器设计与用途学院:广东白云技师学院专业:电子信息工程与电气技术(技师本科)制作学生:邹剑平指导老师:廖高灵四轴飞行器简介配置:单片机AVRATMEGA168PA三轴数字陀螺仪MPU—3050电机(无刷)XXD22121000KV电子调速器(无刷)好盈天行者40A螺旋桨1045电池格氏2200mAh11.1V25C机架DIY机架材料玻璃纤维铝合金四轴飞行器飞行原理重心的距离相等,当对角两个轴产生的升力相同时能够保证力矩的平衡,四轴不会向任何一个四轴飞行器有四个电机呈十字形排列,驱动四片桨旋转产生推力;四个电机轴距几何中方向倾转;而四个电机一对正转,一对反转的方式使得绕竖直轴方向旋转的反扭矩平衡,保证了四轴航向的稳定.此飞行控制板规定四轴电机的排布方式如图所示:前(1号),后(4号),右(3号),左(2号).1,4号电机顺时针方向旋转,2,3号电机逆时针方向旋转.四个电机的转速做相应的变化即可实现四轴横向、纵向、竖直方向和偏航方向上的运动:当四轴需要向前方运动时,2,3号电机保持转速不变,1号电机转速下降,4号电机转速上升,此时4号电机产生的升力大于1号电机的升力,四轴就会沿几何中心向前倾转,桨叶升力沿纵向的分力驱动四轴向前运动.当四轴要转向左转向时,1,4号电机转速上升,2,3号电机转速下降,使向左的反扭距大于向右的反扭矩,四轴在反扭距的作用下向左旋转.四个桨产生的推力,超过或者低于四轴本身重力的时候能够实现竖直方向上升与下降的运动,当桨的升力与四轴本身的重力相等的时候即实现悬停.其他方式的运动原理与以上过程类似.四轴飞行原理虽然简单,但实现起来还需很多工作要做.四轴飞行器控制流程图四轴飞行器的优点四轴飞行器与其他飞机比较相对稳定性高;四轴飞行器与其他飞机比较相对抗风能力强;载重量大(本机最大安全载重1100g);姿态灵活,反应速度快;可超低空飞行;四轴飞行器主要用途可做无人侦察机,空中航拍(FPV),可作为新型微型机器人。
四轴飞行器运动控制系统设计和仿真
四轴飞行器运动控制系统设计和仿真随着科技的发展,四轴飞行器这种机器在日常生活中变得越来越常见。
从无人机的航拍、救援到消防,四轴飞行器的应用越来越广泛。
但是,控制飞行器的姿态和运动依然是一个挑战。
这里将对四轴飞行器的运动控制系统进行设计和仿真。
1. 系统分析先对四轴飞行器进行简单的系统分析。
四轴飞行器有四个电机,每个电机都有一个螺旋桨。
通过改变电机的转速和螺旋桨的旋转方向,可以控制飞行器的姿态和运动。
四轴飞行器有三个自由度的旋转运动,分别是偏航、俯仰和横滚,还有三个自由度的平移运动,分别是上下、左右和前后。
控制这些运动需要一个运动控制系统。
运动控制系统分为两部分:飞行器的传感器和飞行控制器。
传感器用于测量飞行器的状态,例如角速度、角度和线性加速度等。
飞行控制器根据传感器的数据进行控制,以达到控制飞行器运动的目的。
2. 控制算法运动控制系统的重点在于控制算法。
幸运的是,我们可以使用开源的四轴飞行控制器(例如 Pixhawk 和 APM)来控制飞行器。
这些控制器具有成熟的控制算法,可实现飞行器的稳定飞行和自动飞行。
在四轴飞行器的运动控制中,最重要的算法是控制飞行器的姿态。
姿态控制是通过测量三个轴上的角度和角速度实现的。
姿态控制经常使用 PID 控制器。
PID 控制器使用比例、积分和微分三个控制项来控制飞行器的姿态。
3. 系统设计接下来,我们将设计一个四轴飞行器的运动控制系统。
这里主要讨论的是控制器的硬件和软件设计。
3.1 硬件设计飞行控制器通常使用 Arduino 或者其他类似的微控制器。
这些微控制器轻便、可编程并且能够进行必要的计算。
除了微控制器,飞行控制器还应该包含其他必要的硬件,例如传感器、接收器和电池等。
传感器是测量飞行器状态的重要组成部分。
飞行器通常使用加速度计、陀螺仪和罗盘。
加速度计可以测量飞行器在三个轴上的线性加速度,陀螺仪可以测量飞行器在三个轴上的角速度,罗盘可以测量飞行器的方向。
接收器则负责接收运动控制器发出的指令,例如俯仰、横滚和油门等。
视觉导航的四轴飞行器控制系统设计
Science &Technology Vision 科技视界0引言四轴飞行器是一种能够垂直起降的小型低空四旋翼无人飞行器,和固定翼飞行器相比,它具有机械结构简单、成本较低以及飞行稳定性好的特点。
它可代替人来完成在海上、废墟等不适合人员进入的环境提供侦察、救援、绘图等服务。
目前UAV 广泛使用的是GPS 或惯性导航系统,然而其使用具有一定的环境局限性,且惯性导航系统误差随时间积累,因而仅仅需要一些辅助导航来实现飞行器的精确导航。
视觉导航方法,即由机载的视觉传感器获得周围环境的图像信息,然后通过图像算法及相机的位置标定解算出载体的位置,由于视觉传感器是无源的,而且在成本、重量、功率消耗和尺寸上都具有优势,易于实现。
视觉导航方法主要有两种方法,一类是基于视觉传感器以视觉导航为主,直接利用图像特征控制飞行器到指定位置,一般有两个控制环,外环将实时特征与目标特征相比较,从而估计飞行器的飞行速度,然后通过内环控制电机转速使达到理想速度,最后使飞行器到达目标位置。
另一类是视觉辅助导航,一般利用Kalman 滤波方法,融合视觉传感器和惯性传感器给出载体位置,从而控制飞行。
1系统总体设计四轴飞行器视觉导航系统主要由飞行控制系统和视觉导航系统组成。
飞行控制系统主控芯片采用STM32嵌入式处理器,实现对加速度计MPU6050和陀螺仪HMC5883L 的数据采集,从而控制飞行姿态。
飞行控制部分采用四元数算法,对传感器采集的数值进行转化处理,进行姿态解算,利用PID 算法设计了相应的控制规律,实现对飞行器的闭环控制[1]。
视觉导航系统主要由机载摄像头实时捕获周围环境图像,以无线的方式传输到视觉计算机并经过SIFT 算法定位及相机的位置标定解算出载体位置。
设计的四轴飞行器如图1所示。
图1四轴飞行器实物图2系统硬件设计2.1飞行器控制系统结构四轴飞行器的控制系统如图2所示。
飞行控制器是系统的核心部分,所设计的控制器要能够通过采集处理三轴加速度计和陀螺仪传感器数据解算姿态,并根据导航指令和任务要求,结合相应的PID 控制律给出适当的控制信号,控制飞行器的执行机构,改变飞行器的姿态和位置等[2]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Control Design of Four Axis Aircraft
Abstract In recent years the four axis aircraft has become a hot research, many of its characteristics have been enlarged, but also add a lot of hitherto unknown function, but because the four axis aircraft early are made by STM32 as the control center, there is little use of STC51 microcontroller, for four axis aircraft using the 51 chip structure for early. There are some use of single function, flight instability and some other factors not good. This paper mainly focuses on the use of STC15w4k48s4 as basic control center, how to design four aircraft, four aircraft hardware selection, software programming and design of the remote control. The remote controller, using STC15 MCU to control the information collected through the rocker, the NRF24L01 wireless transmission module to send four aircraft, four MPU-6050 aircraft, four aircraft acquisition real-time navigation attitude, STC15 Series MCU control information and attitude information integration, PID algorithm and four element algorithm, the signal into the PWM signal, the motor control of four axis aircraft, the accurate completion of the required flight attitude.
2
四轴飞行器的硬件设计 ................................................ 3 2.1 设计的硬件参数 .................................................. 3 2.2 飞控板结构设计 .................................................. 3 2.3 电路结构设计 .................................................... 4 2.3.1 主制器 ........................................................ 5 2.3.2 传感器 ........................................................ 6 2.3.3 无线通信 ...................................................... 7 2.3.4 电源硬件设计 .................................................. 8 2.4 遥控部分硬件设计 ................................................ 9 2.5 飞行姿态的控制 ................................................. 10
Key Words:
Four axis aircraft; Unmanned aerial vehicle (UAV); Control; PID algorithm
目
1
录
引言 ................................................................ 1 1.1 选题依据 ........................................................ 1 1.2 研究背景及意义 .................................................. 1 1.3 国内外研究现状 .................................................. 1 1.3.1 国外研究现状 .................................................. 1 1.3.2 国内研究现状 .................................................. 2 1.4 研究目的及意义 ........... 2
本科毕业论文
四轴飞行器的控制设计
Control Design of Four Axis Aircraft
学 院:理学院 专 业:电子科学与技术 姓 名:陈 琦 学 号:131415285 指导教师:白海平 职 称:讲 师
论文提交日期:二Ο一七年六月
摘
要
近年来四轴飞行器成为了一项研究的热门,它的许多特点被进行了放大,而且还 增添了许多前所未有的功能,但是由于早期的四轴飞行器都是由 STM32 作为管控中 心,很少有运用 STC51 单片机的,因为早期使用 51 单片机构造的四轴飞行器,存在 着一些使用功能单一,飞行不稳定等一些不良好的因素。 本文主要讨论在运用 STC15w4k48s4 作为管控中心的基础上,如何设计四轴飞行 器、四轴飞行器硬件的选择,软件编程的实现以及遥控器的设计。在遥控器上,运用 STC15 系列单片机收集到摇杆的控制信息,经过 NRF24L01 无线传输模块发送给四轴 飞行器,四轴飞行器上 MPU-6050,采集四轴飞行器实时航行姿态,STC15 系列单片机 将控制信息与姿态信息进行整合, PID 算法以及四元数算法, 将信号转化为 PWM 信号, 控制四轴飞行器的电机,使其准确的完成所需要的飞行姿态。 关键词:四轴飞行器;无人机;控制;PID 算法