红外测距传感器的工作原理及使用
红外接近传感器的工作原理
红外接近传感器的工作原理
红外接近传感器的工作原理
红外接近传感器是一种应用广泛的传感器,可以感知物体的距离。
红外接近传
感器属于一种无接触测距传感器,其主要功能是通过探测物体是否存在,以及物体到传感器的距离,来进行控制和安全检测等应用。
红外接近传感器的工作原理是,通过发射激光或发送红外信号,当外界事物出
现在预设距离范围内时,信号反射回传感器,传感器再捕获反射信号,自动进行控制操作。
传感器的发射端称为发射点,反射回来的信号称为反射点,两者之间的位置距离就是感测距离,它就是传感器检测物体到传感器之间距离的有效信号。
此外,红外传感器还可以实现安全检测功能,当检测外界物体与传感器之间的距离超过预设值时,发出报警信号,防止可能的危险状况的发生。
综上所述,红外接近传感器的工作原理是通过发射红外或激光光束来检测物体
到传感器之间的距离,准确预测物体的存在,并防止可能的危险状况的发生。
红外接近传感器具有精确、安全、运行成本低等优点,已被广泛应用于自动化控制、照明系统、安防系统等方面。
距离传感器原理
距离传感器原理
距离传感器依靠不同的工作原理来测量物体与传感器之间的距离。
下面将介绍几种常见的距离传感器原理。
1. 红外测距原理:红外传感器通过发射红外线并接收反射回来的红外信号来测量距离。
它通过测量红外线的往返时间或强度来确定物体与传感器之间的距离。
2. 超声波测距原理:超声波传感器发射超声波信号,并接收反射回来的信号。
通过测量超声波的往返时间来计算出物体与传感器之间的距离。
3. 激光测距原理:激光传感器通过发射激光束,并测量激光束的反射时间或强度来确定物体与传感器之间的距离。
激光测距具有高精度和较长测量距离的优点。
4. 电磁感应原理:电磁感应传感器利用物体对感应线圈的电磁场变化产生的感应电流来测量距离。
通过测量感应电流的大小或变化来确定物体与传感器之间的距离。
这些距离传感器原理各有优势和适应场景,在工业自动化、机器人导航、安防监控等领域得到广泛应用。
红外传感器的工作原理

红外传感器的工作原理
红外传感器是一种能够探测周围环境红外辐射的设备。
其工作原理是基于物体对红外辐射的吸收以及红外辐射的温度特性。
红外辐射是一种电磁辐射,具有比可见光波长更长的特点,因此人眼无法直接感知。
同时,物体的温度和热能释放会产生红外辐射,这是由于物体的分子振动引起的。
不同温度的物体会以不同的频率和强度发射红外辐射。
红外传感器内部通常包含一个红外发射器和一个红外接收器。
红外发射器会发射一定频率的红外辐射,在发射时需要确保光束的方向性和稳定性。
红外接收器则负责接收周围环境中的红外辐射。
当有物体接近红外传感器时,该物体会在一定程度上吸收或反射红外辐射。
红外接收器会接收到经过物体后剩余的辐射信号。
通过对接收到的红外辐射进行分析和处理,可以判断物体的存在和距离。
基于不同的应用需求,红外传感器可以使用不同的工作原理。
例如,被动红外传感器(PIR)利用物体移动时产生的红外辐
射变化来检测物体的存在。
活动红外传感器(AIR)则通过发
射和接收红外辐射来判断物体的距离和速度。
总的来说,红外传感器通过分析周围环境中的红外辐射来实现物体的探测和监测。
这种工作原理使得红外传感器在安防系统、自动化控制、温度测量等领域得到广泛应用。
红外传感器的原理
红外传感器的原理
- 红外传感器是什么?
红外传感器是一种能够检测红外线辐射的装置,它可以将红外线辐射转化为电信号,从而实现对物体的检测和测量。
- 红外辐射的特点
红外辐射是一种电磁波,其波长在可见光和微波之间,具有穿透力强、不受光照影响、能够穿透烟雾、雾气等特点。
- 红外传感器的工作原理
红外传感器的工作原理是基于物体发射的红外辐射与传感器接收到的红外辐射之间的差异。
当物体发射的红外辐射与传感器接收到的红外辐射相同或相似时,传感器不会产生输出信号;而当物体发射的红外辐射与传感器接收到的红外辐射不同或差异较大时,传感器会产生输出信号。
- 红外传感器的应用
红外传感器广泛应用于自动化控制、安防监控、医疗设备、家电等领域。
例如,自动门、智能家居、红外对射测距仪、红外体温计等都是基于红外传感器的原理实现的。
- 红外传感器的分类
红外传感器根据其工作原理和应用场景的不同,可以分为热释电型红外传感器、红外光电型传感器、红外测温传感器等多种类型,每种类型的传感器都有其独特的特点和应用场景。
- 红外传感器的优缺点
红外传感器的优点是能够穿透烟雾、雾气等物质,不受光照影响,能够实现远距离检测和测量;缺点是受环境温度和干扰影响较大,需要进行校准和滤波处理。
- 红外传感器的未来发展
随着技术的不断发展,红外传感器将会更加智能化、精准化和多
样化,应用范围也会更加广泛。
未来,红外传感器将会成为智能制造、智慧城市、智能交通等领域的重要组成部分。
三角法红外测距原理介绍
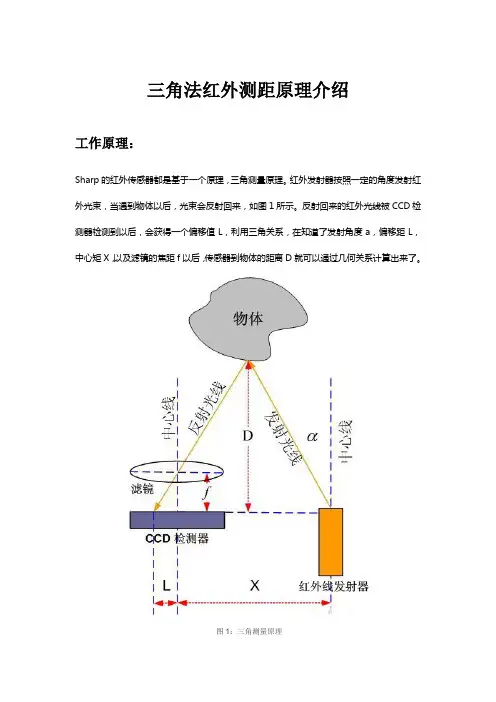
三角法红外测距原理介绍工作原理:Sharp的红外传感器都是基于一个原理,三角测量原理。
红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来,如图1所示。
反射回来的红外光线被CCD检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以及滤镜的焦距f以后,传感器到物体的距离D就可以通过几何关系计算出来了。
图1:三角测量原理可以看到,当D的距离足够近的时候,L值会相当大,超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。
当物体距离D很大时,L值就会很小。
这时CCD检测器能否分辨得出这个很小的L 值成为关键,也就是说CCD的分辨率决定能不能获得足够精确的L值。
要检测越是远的物体,CCD的分辨率要求就越高。
非线性输出:Sharp GS2XX系列的传感器的输出是非线性的。
没个型号的输出曲线都不同。
所以,在实际使用前,最好能对所使用的传感器进行一下校正。
对每个型号的传感器创建一张曲线图,以便在实际使用中获得真实有效的测量数据。
下图是典型的Sharp GP2D12的输出曲线图。
图2:Sharp GP2D12输出曲线从上图中,可以看到,当被探测物体的距离小于10cm的时候,输出电压急剧下降,也就是说从电压读数来看,物体的距离应该是越来越远了。
但是实际上并不是这样的,想象一下,你的机器人本来正在慢慢的靠近障碍物,突然发现障碍物消失了,一般来说,你的控制程序会让你的机器人以全速移动,结果就是,"砰"的一声。
当然了,解决这个方法也不是没有,这里有个小技巧。
只需要改变一下传感器的安装位置,使它到机器人的外围的距离大于最小探测距离就可以了。
如图3所示:图3:可以避免探测误差的安装图示。
e18-d80nk红外传感器检测原理
e18-d80nk红外传感器检测原理
E18-D80NK红外传感器是一种常见的非接触式传感器,可用于检测物体的存在或距离。
其工作原理是基于红外线的反射和接收。
下面将详细介绍其检测原理。
该传感器由发射器和接收器两部分组成。
发射器使用一个红外二极管发射红外线,被检测物体反射一部分光线到接收器。
接收器内置一个红外光敏二极管,接收被反射的光线,并将其转化为电信号。
通过测量接收器输出的电信号,即可确定被检测物体的存在和距离。
当物体接近传感器时,被反射的光线的强度增加,接收器输出的电信号也随之增强。
通过对输出信号的测量,可以确定物体与传感器的距离。
该传感器具有高精度,测距范围为5mm至80cm,测距误差仅为±1mm。
除了距离测量外,E18-D80NK红外传感器还可用于检测物体的存在和移动。
当物体靠近传感器时,被反射的光线被接收器捕获,从而触发器件输出一个信号,表明检测到了物体的存在。
当物体移动过传感器时,反射光线的强度会发生变化,从而导致接收器输出的信号发生变化。
总之,E18-D80NK红外传感器是一种可靠的非接触式传感器,可以用于检测物体的存在、距离和移动等信息。
其工作原理基于红外线的反射和接收,具有高精度和稳定性。
红外线测距仪
红外线测距仪测距仪作为一种精密的测量工具,已经广泛的应用到各个领域。
测距仪可以分为超声波测距仪,红外线测距仪,激光测距仪。
前两种测距仪由于精度和距离收到限制已经不再生产。
目前所说的红外线测距仪指的就是激光红外线测距仪,也就是激光测距仪。
一.红外测距仪的原理利用的是红外线传播时的不扩散原理因为红外线在穿越其它物质时折射率很小所以长距离的测距仪都会考虑红外线而红外线的传播是需要时间的当红外线从测距仪发出碰到反射物被反射回来被测距仪接受到再根据红外线从发出到被接受到的时间及红外线的传播速度就可以算出距离红外线测距仪的工作原理:利用高频调制的红外线在待测距离上往返产生的相位移推算出光束度越时间△t,从而根据D=C△t/2得到距离D。
红外线测距仪,是利用激光对目标的距离进行准确测定的仪器。
激光红外线测距仪在工作时向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离。
激光红外线测距仪重量轻、体积小、操作简单速度快而准确,其误差仅为其它光学红外线测距仪的五分之一到数百分之一。
二.激光红外线测距仪分类激光红外线测距仪分手持激光红外线测距仪和望远镜式激光红外线测距仪:1、手持激光红外线测距仪:测量距离一般在200米内,测距仪。
在功能上除能测量距离外,一般还能计算测量物体的体积。
目前市面上主流的都是激光红外线测距仪,手持式激光红外线测距仪全球前两大品牌是徕卡和博世,右图就是一款主流的手持式激光红外线测距仪。
2、望远镜式激光红外线测距仪:测量距离一般在600-3000米左右,这类红外线测距仪测量距离比较远,但精度相对较低,精度一般在1米左右。
主要应用范围为野外长距离测量。
望远镜激光红外线测距仪,为远距离激光红外线测距仪,目前在户外使用相当广泛,望远镜激光红外线测距仪全球前四大品牌是图雅得、博士能、奥尔法和尼康。
四个品牌在产品上各有特点,2011年,美国激光技术杂志公布的数据,2011年全球单品销售冠军是图雅得YP900,这款红外线测距仪测量精准,反应速度快捷三.红外线测距仪的应用领域激光红外线测距仪广泛用于地形测量,战场测量,坦克,飞机,舰艇和火炮对目标的测距,测量云层、飞机、导弹以及人造卫星的高度等。
红外测距的基本结构及系统设计 红外测距的常用方法和原理是什么
红外测距的基本结构及系统设计红外测距的常用方法和原理是什么随着科学技术的不断发展,在测距领域也先后出现了激光测距、(微波)雷达测距、超声波测距及(红外)线测距等方式。
作为一种应用广泛、测量精度高的测量方式,红外测距利用红外线传播时不扩散、折射率小的特性,根据红外线从发射模块发出到被物体反射回来被接受模块接受所需要的时间,采用相应的测距公式来实现对物体距离的测量。
红外测距最早出现于上世纪60年代,是一种以红外线作为传输介质的测量方法。
红外测距的研究有着非比寻常的意义,其本身具有其他测距方式没有的特点,技术难度相对不大,系统构成成本较低、性能良好、使用方便、简单,对各行各业均有着不可或缺的贡献,因而其市场需求量更大,发展空间更广。
红外测距仪是指用调制的红外光进行精密的距离测量,测量范围一般为1-5公里。
红外线测距(传感器)有它的几个特点,远距离测量,在无反光板和反射率低的情况下能测量较远的距离;有同步输入端,可多个传感器同步测量;测量范围广,响应时间短;外形设计紧凑,易于安装,便于操作;所以它的应用价值比较高。
红外测距的常用方法和原理时间差法测距原理时间差法测距原理是将红外测距传感器的红外发射端发送(信号)与接收端接受信号的时间差t写入(单片机)中,通过光传播距离公式来计算出传播距离L。
式中c是光的传播速度为。
反射能量法测距原理反射能量法是由发射(控制电路)控制发光元件发出信号(通常为红外线)射向目标物体,经物体反射后传回系统的接收端,通过光电转换器接收的光能量大小进而计算出目标物体的距离L。
式中P为接收端接收到的能量,K为常数,其大小由发射系统输出功率、转换效率决定,d为被测目标漫反射率。
相位法测距原理相位测距法是利用无线电波段的频率,对红外激光束进行幅度调制并测定调制光往返一次所产生的相位延迟,再根据调制光的波长,换算出此相位延迟所代表的距离D,此方式测量精度非常之高,相对误差可以保持在百分之一以内,但要求被测目标必须能主动发出无线电波产生相应的相位值。
三角法红外测距原理
三角法红外测距原理
三角法红外测距原理是一种常用的测量物体距离的方法。
它基于三角形的几何关系,通过测量物体的角度和距离,可以计算出物体到测量设备的准确距离。
在红外测距装置中,通常包含一个红外发射器和一个红外接收器。
发射器会发出一束红外光束,该光束会经过物体,并被物体反射回来。
接收器会接收到被反射回的红外光束。
为了计算物体到测距装置的距离,我们需要测量物体的角度和红外光束的发射角度。
通过测量发射器和接收器之间的角度差,以及物体与测距装置之间的角度,我们可以使用三角函数来计算出物体到测距装置的距离。
具体而言,我们可以使用正切函数来计算距离。
设发射器到物体的距离为a,物体到接收器的距离为b,物体到测距装置的
距离为c,测得发射器和接收器之间的角度差为θ,则有如下
关系:
tan(θ) = a / b
我们可以通过测量发射器和接收器之间的距离和角度差,来计算出a和b的值,从而得到c的值。
三角法红外测距原理适用于许多领域,如自动驾驶、室内导航、安防监控等。
它具有测量精度高、响应速度快的特点,并且可以在不同光照条件下进行测量。
红外测距传感器的原理与设计最终版
红外测距传感器的原理与设计摘要:现代科学技术的发展,进入了许多新领域,而在测距方面先后出现了激光测距、微波雷达测距、超声波测距及红外线测距。
为了实现物体近距离、高精度的无线测量,我采用红外发射接收模块作为距离传感器,单片机作为处理器,编写A/D转换、显示以及与PC机的通信程序,开发了一套便推式的红外距离测量系统,系统可以高精度的实时显示所测的距离,并且可以将距离量通过串口发送到PC机显示处理、本系统结构简单可靠、体积小、测量精度高、方便使用,另外本系统形成了一套完善的软硬件开发平台,可以进行扩展、移植和做进一步的开发。
关键词:红外测距;68HC11E1;A/D转换;Principle and design of the infrared distance sensor Abstract:The development of modern science and technology, into many new areas, has a laser The development of modern science and technology, into many new areas, has a laser range finder in the ranging aspects, ranging of microwave radar, ultrasonic ranging and infrared ranging. In order to achieve the objects at close range, high-precision wireless measurement, I used the infrared transmitter receiver module as the distance sensor, microcontroller as the processor to write the A / D conversion, display and communication with the PC program, developed a will to push infrared distance measurement systems, high-precision real-time system can display the measured distance, and distance measuring can be sent through the serial port to a PC display processing, the system structure is simple and reliable, small size, high accuracy, ease of use, while this system the formation of a complete set of hardware and software development platform can be extended, transplantation, and further development.Key words:Infrared distance; 68HC11E1; A / D conversion;一、绪论 (1)1.1设计背景 (1)1.2红外线简介 (1)1.3红外线传感器概述 (2)1.3.1 红外线传感器系统介绍 (2)1.3.2 红外线传感器的分类 (3)1.3.3 红外线传感器的应用 (6)二、红外测距的方法和原理 (7)2.1几种红外测距原理及选择 (7)2.1.1 相位测距原理 (7)2.1.2 PSD测距原理 (9)2.1.3 带运动机构的双象比较法原理 (9)2.1.4 时间差测距法原理 (9)2.1.5 反射能量法原理 (9)2.1.6 红外测距原理的选择 (9)2.2红外测距系统的工作原理 (9)三、红外测距的基本结构及系统框图 (11)3.1红外测距的过程 (11)3.2红外测距系统框图 (11)3.3主要元件分析 (12)3.3.1 红外线发射器件 (12)3.3.2红外线光敏二极管 (13)四、红外测距硬件电路设计 (14)4.1单片机最小系统 (14)4.2红外发射电路设计 (16)4.3红外接收放大电路设计 (17)4.4电源电路 (19)4.5数码管显示电路 (21)五、软件模块设计 (23)5.1程序设计步骤 (23)5.2软件设计框图: (23)5.3红外测距A/D转换程序 (24)六、测量精度分析 (26)[参考文献] (27)附录 (28)致谢 (28)1.1 设计背景在基础学科研究中,传感器具有突出的地位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
光电检测技术与应用
论文
题目:红外测距传感器的工作原理及使用
院系:机电工程学院
班级:测控xxxx
完成日期:2017/5/6
小组:第x组
小组成员:xxxxxxxxxx
红外测距传感器的工作原理及使用
摘要:
利用光的反射性质,将光学系统与电路系统相结合可以制作避障传感器,通过单片机的控制,可以完成智能车在运行过程中,对障碍物的处理。
避障传感器基本原理:利用物体的反射性质。
在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。
如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。
传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调车轮或者舵机工作,完成躲避障碍物的动作。
关键字:光电检测技术、智能车、测距、红外测距传感器、单片机
一、引言
光电检测作为光学与电子学相结合而产生的一门新兴检测技术,主要包括光信息获取、光电变换、光信息测量以及测量信息的智能化处理等,具有精度高、速度快、距离远、容量大、非接触、寿命长、易于自动化和智能化等优点,在国民经济各行业中得到了迅猛的发展和广泛的应用,如光扫描、光跟踪测量,光纤测量,激光测量,红外测量,图像测量,微光、弱光测量等,是当前最主要和最具有潜力的光电信息技术。
二、光电检测技术的概念
光电检测技术是光学与电子学相结合而产生的一门新兴检测技术。
它主要利用电子技术对光学信号进行检测,并进一步传递、储存、控制、计算和显示。
光电检测技术从原理上讲可以检测一切能够影响光量和光特性的非电量。
它可通过光学系统把待检测的非电量信息变换成为便于接受的光学信息,然后用光电探测器件将光学信息量变换成电量,并进一步经过电路放大、处理,以达到电信号输出的目的。
然后采用电子学、信息论、计算机及物理学等方法分析噪声产生的原因和规律,以便于进行相应的电路改进,更好地研究被噪声淹没的微弱有用信号的特点与相关性,从而了解非电量的状态。
微弱信号检测的目的是从强噪声中提取有用信号,同时提高测系统输出信号的信噪比。
光电检测技术的系统机构比较简单,分为信号的处理器,受光器,光源。
在实际检测过程中,受光器在获得感知信号后,就会被反映为不同形状、颜色的信号,同时根据这些器件所处在的不同位置,就能够将他分为反射型与透过型的两种比较的模式。
光电检测的媒介光应当是自然的光,例如白炽灯或者萤光灯。
特别是随着这些技术的发展,光电技术也取得的非常好发展。
由于投光器在发出光后,会以不一样的方式触摸这些被检测物中,直到照射到检测系统中的受光器中,同时受光器在此刺激下,会产生一定量的电流,这就是我们常说的光敏性的原件,实际生活中应用比较广泛的有三极管、二极管。
三、光电检测技术的应用
智能车方面的应用、家庭扫地机器人方面的应用:利用光的反射性质,将光学系统与电路系统相结合可以制作避障传感器,通过单片机的控制,可以完成智能车在运行过程中,对障碍物的处理。
避障传感器基本原理:利用物体的反射性质。
在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。
如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。
传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调车轮或者舵机工作,完成躲避障碍物的动作。
四、常用光电检测器件:红外测距传感器
原理:其输出为电压数值,通过公式L?=?(6762/(9-X))-4可计算出小车与障碍物之间的距离。
红外测距传感器是测距传感器中的一种比较重要的类型,与超声波测距传感器、激光测距传感器是测距传感器的主力传感器,相信通过之前的介绍,大家已经对另外两个传感器有了一定的认识,我就在此简单的介绍一下红外测距传感器的工作原理及使用时的注意事项。
1)红外测距传感器的原理
红外测距传感器具有一对红外信号发射与接收二极管,利用的红外测距传感器LDM301发射出一束红外光,在照射到物体后形成一个反射的过程,反射到传感器后接收信号,然后利用CCD图像处理接收发射与接收的时间差的数据。
经信号处理器处理后计算出物体的距离。
这不仅可以使用于自然表面,也可用于加反射板。
测量距离远,很高的频率响应,适合于恶劣的工业环境中。
红外测距传感器利用红外信号遇到障碍物距离的不同反射的强度也不同的原理,进行障碍物远近的检测。
红外传感器是智能机器避障最好的选择。
目前,实验室常用的一种传感器是夏普GP2Y0A41SK0F 红外测距传感器,被用作智能车近距离障碍目标的识别。
2)红外测距传感器的特点
红外测距传感器的远距离测量,在无反光板和反射率低的情况下能测量较远的距离;有同步输入端,可多个传感器同步测量;测量范围广,响应时间短;?外形设计紧凑,易于安装,便于操作。
3)红外测距传感器的非线性输出
红外测距传感器的输出是非线性的。
每个型号的输出曲线都不同。
所以,在实际使用前,最好能对所使用的传感器进行一下校正。
对每个型号的传感器创建?一张曲线图,以便在实际使用中获得真实有效的测量数据。
红外测距系统利用红外线传播时的不扩散原理,通过电子元器件之间的配合,将物体之间的距离转变为电压值,实现了模拟量向数字量的转换,在实际电路中,其输出接口可以连接单片机的任何一个 I/O 口,极大地节约了单片机资源。
五、结论
光电传感器具有其他传感器所不能取代优越性,因此它发展前景非常好,应用也会越来越广泛.随着现代科学技术以及复杂自动控制系统和信息处理与技术的提高,光电检测技术将朝着检测结果高精度、系统智能化、检测结果数字化、
检测功能多元化、检测器件微型化、检测系统自动化的放向发展,它将广泛应用于工业、农业、家庭、医学、军事和空间科学技术等许多科学领域,其应用前景是相当乐观。