i方c总线协议
IEC系列协议简介

IEC 系列规约国电南自四方工程部徐昀制定标准的国际组织国际标准化组织ISO 和国际电报询问委员会CCITT 以及1993 年3 月1 日后取代CCI T T相关职能的国际电信联盟电信标准部门ITU-T 为国际上制定计算机系统与其RTU进展数据通信协议标准的主要机构。
但由于电力系统对实时性和牢靠性的特别要求,1976 年ISO 和国际电工委员会IEC 规定:凡属强电工业和电子工业领域的标准化问题连续由IEC 负责,其他领域由ISO负责。
为此IEC TC-57 在CCITT 和ISO 的国际数据通信协议标准根底上制定了性能增加型构造EPA 协议,即IEC 60870-5 远动传输协议,成为电力信息传输协议的根底。
IEC TC-57 成立于1964 年,原名远动,远方保护及通信技术委员会。
1994 年起更名为电力系统掌握及其通信技术委员会。
我国对应的原全国远动通信标准化技术委员会从2022 年起更名为全国电力系统掌握及其通信标准化技术委员会。
IEC TC-57 的工作方式是成立各个工作组,分别制定各个领域的国际标准,其中与通信协议有的工作组有:第3 工作组:远动,协议第7 工作组:远动,与ISO 和ITU-T 标准兼容的协议第9 工作组:承受配电线载波的配电自动化第10 工作组:负责IEC61850 中变电站数据通信协议的整体描述和总体功能要求第11 工作组:负责IEC61850 中站级数据通信总线的定义第12 工作组:负责IEC61850 中过程级数据通信协议的定义远动协议系列IEC 60870-5:远动设备和系统第5 局部,传输协议〔Transmission Protocols〕IEC 60870-5-1:传输帧格式〔Transmission Frame Formats,1990〕IEC 60870-5-2:链路传输规章〔Link Transmission Procedures,1992〕IEC 60870-5-3:应用数据的一般构造〔General Structure of Application Data,1992〕IEC 60870-5-4:应用信息元素的定义和编码〔Definition and Coding of Application Information Elements,1992〕IEC 60870-5-5:根本应用功能〔Basic Application Functions,1995〕IEC 60870-5-101:根本远动任务的配套标准〔国标为DL/T634-1999,非等效承受〕〔Transmission Protocols-Companion Standard for Basic Telecontrol Tasks,1995〕IEC 60870-5-102:电力系统电能计量传输的配套标准〔国标为DL/T719-2022,等同承受〕〔Transmission Protocols-Companion Standard for the Transmission ofIntegrated Totals in Electric Power Systems,1996〕IEC 60870-5-103:继电保护设备信息接口的配套标准〔国标为DL/T667-1999,等同承受〕〔Transmission Protocols-Companion Standard for the Informative Interfaceof Protection Equipment,1997〕IEC 60870-5-104:承受标准传输协议子集的IEC 60870-5-101 的网络访问,即网络远动任务的配套标准,是目前唯一可供选择的网络访问协议〔Transmmsion Protocol Network access for IEC60870-5-101 using standardtransport profiles〕数据通信协议系列IEC 60870-6:远动设备和系统第6 局部,与ISO 标准和ITU-T 建议兼容的远动协议〔Telecontrol Protocols Compatible with ISO Standards and ITU_TRecommendations〕该传输协议主要应用于计算机之间的数据通信及联网,如变电站内的计算机和远方调度工作站,调度工作站和调度工作站之间,调度局和调度局之间。
LIN和CAN车载网络介绍

浅谈车载网络为了在提高性能与控制线束数量之间寻求一种有效的解决途径,在20世纪80年代初,出现了一种基于数据网络的车内信息交互方式——车载网络。
车载网络采取基于串行数据总线体系的结构,最早的车载网络是在UART(Universal Asynchronous Receiver/Transmitter)的基础上建立,如通用汽车的E&C、克莱斯勒的CCD等车载网络都是UART在汽车上的应用实例。
由于汽车具有强大的产业背景,随后车载网络由借助通用微处理器/微控制器集成的通用串行数据总线,逐渐过渡到根据汽车具体情况,在微处理器/微控制器中定制专用串行数据总线。
20世纪90年代中期,为了规范车载网络的研究设计与生产应用,美国汽车工程师协会(SAE)下属的汽车网络委员会按照数据传输速率划分把车载网络分为Class A、Class B、Class C三个级别:Class A的数据速率通常低于20Kbps,如LIN,主要用于车门控制、空调、仪表板;Class B的数据速率为10Kbps~125Kbps,如低速CAN(ISO 11898),主要是事件驱动和周期性的传输;Class C的数据速率为125Kbps~1Mbps,如高速CAN(ISO898),主要用于引擎定时、燃料输送、ABS等需要实时传输的周期性参数。
拥有更高传输速率的MOST和FlexRay主要适用于音视频数据流的传输。
目前与汽车动力、底盘和车身密切相关的车载网络主要有CAN、LIN和FlexRay。
从全球车载网络的应用现状来看,通过20多年的发展,CAN已成为目前全球产业化汽车应用车载网络的主流。
CAN,全称为“Controller Area Network”,即控制器局域网,CAN 数据总线又称为CAN—BUS总线,20世纪80年代初由德国Bosch 公司开发,作为一种由ISO定义的串行通讯总线,其通信介质可以是双绞线、同轴电缆或光导纤维。
I C总线的通讯方式

I2C总线的通讯方式1、总线初始化(init)SCL=1 SDA=1将总线初始化,释放总线初始状态,将总线SCL与SDA两条线全部拉高。
2、起动信号(start)SCL=1 SDA=0启动信号就是在SCL为高电平期间,SDA送一个下降沿脉冲,持续时间大于4.7us.3、寻址信号寻址信号包括7位寻址和10位寻址两种,7位寻址:前7位为地址信号,第8位(低位)为方向位,表示R/W,是读数据还是写数据的意思。
4、应答信号(respond)SCL=1 SDA=0应答信号就是在SCL为高电平期间,SDA被从设备拉成低电平,同时持续时间应该大于4us.5、数据信号主机发送1字节的数据信号,共8位数据。
同时这些数据只有在SCL为低电平期间SDA数据才能变化,每次发送1字节数据,从机接收到数据后,每次都应该回复一个应答信号才能够传送下一字节信号。
6、停止信号(stop)SCL=1 SDA=1停止信号就是SCL在高电平期间,SDA来一个上升沿脉冲,同时上升沿脉冲持续时间应该大于40us实列程序://///////////////////总线初始化程序/////////////////////////void init(){SCL=1; //把时钟线释放,置为1delay();SDA=1; //把数据线释放,置为1delay();}/////////////////////启动信号程序///////////////////////// void start(){SDA=1; //首先向数据线送高电平信号delay(); //延时SCL=1; //向时钟线送高电平时钟信号delay();SDA=0; //把数据端变为低电平delay();}/////////////////////应答信号程序///////////////////////// void respons(){uchar i; //首先定义一个字符型变量SCL=1; //第九个时钟信号为高电平delay();while((SDA==1)&&(i<250))i++;/*判断数据信号是否等于1(数据端是否收到应答信号)SDA等于1表示没有收到应答信号,则执行下列语句,如果有应答信号,SDA等于0,则退出while循环,同时进行时间限制,如果超过一段时间,则默认主机收到了应答引号,退出while语句。
I 2C总线原理及应用实例
襻 奎 止筹
英尺 , 并且能够以 1K p 的最大传输速率支持 4 0bs O个组件。2 I C总
线的另一个优点是 , 它支 持多主控( l— s r g, 中任何 能 mut mat i ) 其 i en 够进行发送和接收的设备都 可以成 为主总线 。一个主控能够控 制信号的传输 和时钟频率 。当然 , 在任何时间点上只能有一个 主
一
I 总 线 原理 及 应 用 实 例 ℃
I 总 线 原 理 及 应 用 实 例 2 C
0 引言
F ne-nert i u ) 线 是 一 种 由 P LP Cf t It a dCr i总 I r g e ct HIIS公 司开 发 的两线 式串行总线 , 于连 接微控制器及其外 围设备。z 用 I C总线产 生 于 在 8 代 , 初 为 音 频 和 视 频 设 备 开 发 , 今 主 要 在 服 务 0年 最 如
义为发送器 , 器件接收数据则定义为接收器 。主器件和从器件都 可以工作 于接收 和发送状态。 总线 必须由主器件 ( 通常为微控
制器 ) 控制 , 主器件产生 串行时钟 (C ) S L 控制总线的传输方 向 , 并
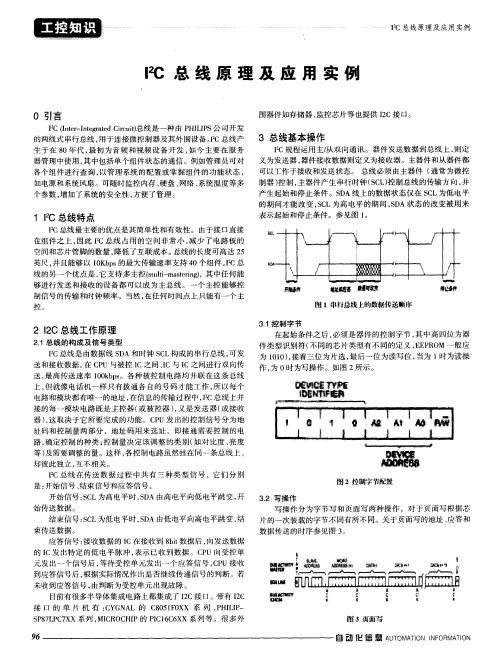
产生起 始和停止条件 。S A线上 的数据状态 仅在 S L为低电平 D C 的期间才能 改变 ,C S L为 高电平 的期间 ,D S A状态 的改变被用来 表示起 始和停止条件 。参见图 1 。
写操作分为字 节写和页面写两种操 作 ,对于 页面写根据芯
结束信号 :C S L为低电平时 ,D S A由低电平 向高电平跳变 , 结
束传送数据。 应答信号 : 接收数据的 I c在接 收到 8 i bt 数据 后 , 向发送数据 的I c发 出特定的低 电平脉 冲 , 示已收到数据 。C U向受控 单 表 P 元发 出一个信号后 , 等待受控单元发 出一 个应答信号 ,P C U接 收 到应答信号后 , 根据实际情 况作 L是 否继续传递信 号的判断 。若 叶 J 未收到应答 信号 , 由判断为受控单元 出现故 障。
IIC总线协议-基于at24c64
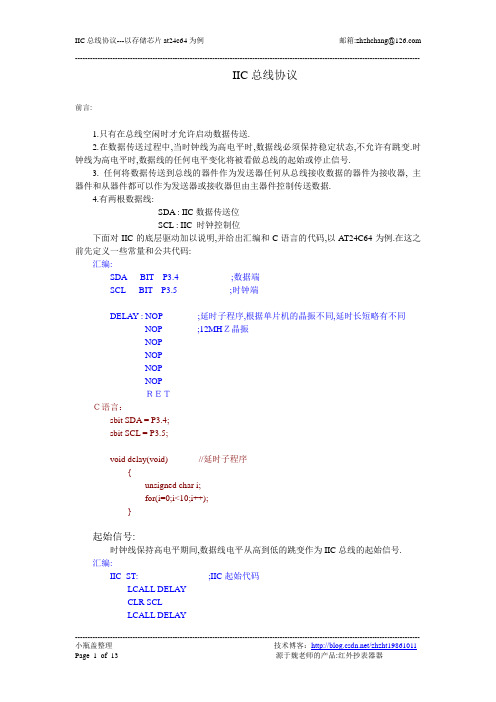
IIC总线协议前言:1.只有在总线空闲时才允许启动数据传送.2.在数据传送过程中,当时钟线为高电平时,数据线必须保持稳定状态,不允许有跳变.时钟线为高电平时,数据线的任何电平变化将被看做总线的起始或停止信号.3.任何将数据传送到总线的器件作为发送器任何从总线接收数据的器件为接收器,主器件和从器件都可以作为发送器或接收器但由主器件控制传送数据.4.有两根数据线:SDA : IIC数据传送位SCL : IIC 时钟控制位下面对IIC的底层驱动加以说明,并给出汇编和C语言的代码,以AT24C64为例.在这之前先定义一些常量和公共代码:汇编:SDA BIT P3.4 ;数据端SCL BIT P3.5 ;时钟端DELAY : NOP ;延时子程序,根据单片机的晶振不同,延时长短略有不同NOP ;12MHZ晶振NOPNOPNOPNOPRETC语言:sbit SDA = P3.4;sbit SCL = P3.5;void delay(void) //延时子程序{unsigned char i;for(i=0;i<10;i++);}起始信号:时钟线保持高电平期间,数据线电平从高到低的跳变作为IIC总线的起始信号.汇编:IIC_ST: ;IIC起始代码LCALL DELAYCLR SCLLCALL DELAYLCALL DELAYSETB SDALCALL DELAYLCALL DELAYSETB SCLLCALL DELAYLCALL DELAYCLR SDALCALL DELAYLCALL DELAYCLR SCLLCALL DELAYRETC语言:void iic_start(void){SCL=0;delay();SDA=1;delay();SCL=1;delay();SDA=0;delay();SCL=0;delay();}停止信号:时钟线保持高电平期间,数据线电平从低变高. 汇编:IIC_SP:LCALL DELAYCLR SCLLCALL DELAYLCALL DELAYCLR SDALCALL DELAYLCALL DELAYSETB SCLLCALL DELAYLCALL DELAYSETB SDALCALL DELAYRETC语言:void iic_stop(void){delay();SCL=0;delay();SDA=0;delay();SCL=1delay();SDA=1;delay();}器件寻址:首先发送一个起始信号,启动发送过程,然后发送它所需要的寻址的从器件的地址.8从位器件地址的高4位固定为1010,接下来的三位为器件的地址位,最低一位作为读写控制位.1: 表示从器件进行读;0: 表示对器件进行写.应答信号:IIC总线数据传送时,每成功的传送一个字节数据后,接收器都必须产生一个应答信号.应答的器件在第九个时钟周期时将SDA拉低,表示收到一个8位数据.写操作:(字节模式)主器件发送起始信号和从器件地址信息(R/W位清0)给从器件,在从器件送回应答信号后,主器件发送两个8位地址字写入从器件的地址指针,主器件在收到从器件的应答信号后,再发送数据到到被寻址的从器件存储单元,从器件再次应答,并在主器件产生停止信号后开始内部数据的擦写.汇编:;##############写数据到at24c64-ATW2##############;说明:写一字节数据到at24c64,失败PSW.5置1;入口参数:A;出口参数:无;###############################################IIC_WB:MOV R2,#8CLR SCLJ4: RLC ALCALL DELAYLCALL DELAYMOV SDA,CLCALL DELAYLCALL DELAYSETB SCLLCALL DELAYLCALL DELAYCLR SCLDJNZ R2,J4SETB SDALCALL DELAYLCALL DELAYSETB SCL ;第九个时钟周期LCALL DELAYLCALL DELAYJB SDA,J1 ;正常情况下,第九个时钟周期收到的SDA应为低CLR SCL ;释放总线LCALL DELAYLCALL DELAYCLR PSW.5 ;接收成功LJMP edwJ1: CLR SCL ;释放总线SETB PSW.5 ;接收失败edw: RETC语言:void iic_write_byte(unsigned char w_byte){unsigned char i;SCL=0;for(i=0;i<8;i++){delay();if((w_byte<<i)&0x80)SDA=1;elseSDA=0;delay();SCL=1;delay();SCL=0;}SDA=1;delay();SCL=1; //第九个时钟周期delay();if(SDA==1) //正常情况下,第九个时钟周期时,收到的SDA应该为低电平{ //写入出错SCL=0;PSW.5=1; //出错标志}else{ //写入成功SCL=0;PSW.5=0; //成功标志}}读操作:读操作的初始化方式和写操作一样,仅把R/W位置1.读操作的种类:1.立即/当前地址读(本例未用)2.选择/随机读: 允许对任意字节进行读,首先发送起始信号,从器件地址和它想读的字节数数据地址,执行一个伪写操作,在A T24C64应答之后,主器件重新发送起始信号和从器件地址,此时R/W位置1.AT24C64响应并发送应答信号,然后输出所要求的一个8位字节数据.主器件不发送应答信号但产生一个停止信号.汇编1:;/** 单字节读**/;读出的一个字节存放在A中IIC_RB:CLR ACLR CLCALL DELAYLCALL DELAYCLR SCLLCALL DELAYLCALL DELAYMOV R2,#8J5: SETB SCLLCALL DELAYLCALL DELAYMOV C,SDARLC ALCALL DELAYCLR SCLLCALL DELAYLCALL DELAYDJNZ R2,J5CLR SDALCALL DELAYLCALL DELAYSETB SCL ;第九个时钟周期,应将SDA拉低作为应答信号LCALL DELAYLCALL DELAYCLR SCL ;释放总线LCALL DELAYLCALL DELAYSETB SDARET汇编2:;################序列读最后一字节###############;读最后一字节时需要发送停止信号IIC_RL:CLR ACLR CLCALL DELAYLCALL DELAYCLR SCLLCALL DELAYLCALL DELAYMOV R2,#8J50: SETB SCLLCALL DELAYLCALL DELAYMOV C,SDARLC ALCALL DELAYLCALL DELAYCLR SCLLCALL DELAYLCALL DELAYDJNZ R2,J50SETB SDALCALL DELAYSETB SCL ;停止信号LCALL DELAYLCALL DELAYRETC语言1: 单字节读unsigned char iic_read_byte(void){unsigned char i,j=0;delay();SCL=0;delay();for(i=0;i<8;i++){SCL=1;delay();j<<=1;if(SDA==1)j+=1;delay();SCL=0;delay();}SDA=0;delay();SCL=1;delay();SCL=0;delay();SDA=1;return j;}C语言2: 序列读最后一字节unsigned char iic_read_last_byte(void){unsigned char I,j=0;delay();SCL=0;delay();for(i=0;i<8;i++){SCL=1;delay();j<<=1;if(SDA==1)j+=1;delay();SCL=0;delay();}SDA=1;delay();SCL=1; //停止信号delay();return j;}举例: 以AT公司生产的IIC器件EEPROM: at24c64为例,对该器件进行读写1.原理图AT24C64器件简介:2.将位于R0(buf)所指向的地址单元中的COUNT(count)个数据写入AT24C64的ADDRH,ADDRL(addrh,dddrl)地址单元中.(括号内为c语言变量)汇编:(会用到上面给出的IIC驱动子程序以及定义的一些变量和接口)ADDRH EQU 13HADDRL EQU 14H ;定义读写AT24C64的首地址STOR1: MOV COUNT,#4 ;写入的字节数MOV ADDRH,#xx ; 写入到AT24C64的地址字MOV ADDRL,#xxLCALL WRDAT ;将位于R0所指向的地址单元中的COUNT个数据写入;AT24C64的ADDRH,ADDRL地址单元中;###########所有参数写入A T24C64,共4字节#################;说明:将表号和用户电量共四字节数据写入A T24C64中;入口参数:; 1.数据间接寻址地址-R0; 2.写入到AT24C64的地址字-ADDRH,ADDRL; 3.写入字节数-COUNT;出口参数:无;#######################################################WRDAT: LCALL IIC_ST ;STARTMOV A,#0A0HLCALL IIC_WB ;写器件寻址00H(第一片A T24C64) 将A中的字符发送JB PSW.5,WRDATMOV A,ADDRHLCALL IIC_WBJB PSW.5,WRDATMOV A,ADDRLLCALL IIC_WB ;存储单元地址JB PSW.5,WRDATMOV R7,COUNTWRDAT0: MOV A,@R0LCALL IIC_WB ;写入数据JB PSW.5,WRDATINC R0DJNZ R7,WRDAT0LCALL IIC_SP ;停止LCALL DL20MS ;延时,等待将数据擦写到at24c64中RETC语言:unsigned char count=0x04;unsigned char addrh=0xxx;unsigned char addrl=0xxx;unsigned char t_buf[];while(!write_byte(t_buf,addrh,addrl,count));/*###########所有参数写入AT24C64,共4字节################# //说明:将表号和用户电量共四字节数据写入AT24C64中//入口参数:; 1.数据间接寻址地址-buf; 2.写入到AT24C64的地址字-addh,addrl; 3.写入字节数-count;出口参数:1表示写成功,0表示写失败;#######################################################*/ bit write_byte(unsigned char * buf, //unsigned char addrh,unsigned char addrl,unsigned char count){unsigned char i;iic_start(); //startiic_write_byte(0x0a0); //写器件寻址0x00(第一片at24c64) if(PSW.5)return 0;iic_write_byte(addrh);if(PSW.5)return 0;iic_write_byte(addrl);if(PSW.5)return 0;for(i=0;i<count;i++){iic_write_byte(*buf);if(PSW.5)return 0;buf++;}iic_stop();return 1;}2.从at24c64的ADDRH,ADDRL(addrh,addrl)地址单元中读出COUNT(count)个数据存放到单片机R0(buf)指定的地址单元中.(括号中为C语言变量)汇编: (会用到上面给出的IIC驱动子程序以及定义的一些变量和接口)ADDRH EQU 13HADDRL EQU 14H ;定义读写AT24C64的首地址STOR1: MOV COUNT,#4 ;读出入的字节数MOV ADDRH,#xx ; 读入的AT24C64的地址字MOV ADDRL,#xxLCALL LDDAT ; 从at24c64中读数据;/*############从at24c64中读数据#########################; 入口参数:LDDA T: LCALL IIC_ST ;STARTMOV A,#0A0H ;对器件进行写LCALL IIC_WB ;虚写操作器件寻址00H(第一片AT24C64)JB PSW.5,LDDA TMOV A,ADDRHLCALL IIC_WB ;JB PSW.5,LDDA TMOV A,ADDRLLCALL IIC_WB ;虚写存储单元地址JB PSW.5,LDDA T;以上为先初始化一个读数据地址LCALL IIC_ST ;STARTMOV A,#0A1HLCALL IIC_WB ;读操作器件寻址00H(第一片A T24C64)JB PSW.5,LDDA TMOV R7,COUNTCJNE R7,#01,LD01LJMP LDDA T1LD01: DEC R7LDDAT0: LCALL IIC_RB ;现行地址读(0000H)MOV @R0,AINC R0DJNZ R7,LDDAT0LDDAT1: LCALL IIC_RL ;读最后一字节,读完后给A T24C64发停止信号MOV @R0,Ainc r0LCALL IIC_SP ;停止信号RETC语言:unsigned char count=0x04;unsigned char addrh=0xxx;unsigned char addrl=0xxx;unsigned char r_buf[];while(!read_byte(r_buf,addrh,addrl,count));/* */bit read_byte(unsigned char *buf, //存放读到的数据unsigned char addrh,unsigned char addrl, //要读的数据地址unsigned char count) //需要读的个数{unsigned char i;iic_start();iic_write_byte(0x0a0); //对器件进行寻址,虚写操作器件寻址00H(第一片) if(PSW.5)return 0;iic_write_byte(addrh); //虚写存储单元地址if(PSW.5)return 0;iic_write_byte(addrl); //虚写存储单元地址if(PSW.5)return 0;//以上为初始化一个读数据地址iic_start(); //重发起始信号iic_write_byte(0x0a1); //对器件读命令if(PSW.5)return 0;if(count==1){*buf=iic_read_last_byte();buf++;}else{for(i=0;i<count;i++){*buf=iic_read_byte();buf++;}}iic_stop();return 1;}。
I 2C总线驱动在嵌入式系统中的两种实现

摘 要 : C总 线 是 一种 用 于 I 器件 之 间 连接 的二 线制 总 线 , 嵌 入 式 系统 中有 广 泛 的 应 用 。 嵌 入 式 处理 器 本 身 携 带 I C 在 IC控 制 器 时 , 以 直接 通 过 配置 特 殊 寄 存 器 来 实 现 IC 的 功 能 ; 当缺 少 IC控 制 器 时 , 需要 通 过 软 件 模 拟 的 方 法 来 实 可 而 则
中图 分 类 号 : P 6 . T 38 1
文献标识码: B
文 章 编 号 :0 4 7X(0 7 O 0 6 3 10 —3 3 20 )8— 5 —0
Two Ap r a h s f r 1 Bu i e n Em b d e y t m p o c e o 2 C s Drv r : u sak n f2一wi u o n e —c n e tn h C s r me t , n d l s d i m b d e y t ms b t t I C b si i d o a r b sf rit r o n c ig t eI i t u n s a d wi ey u e n e e d d s s e . e n I h mb d e r c s o a h o t o lr t e I C ta s o t t n c n b c iv d b o f u ig t e s e i c r g se so ft ee e d d p o e s rh st eI C c n r l 。 h r n p ra i a ea h e e y c n i rn h p cf e it r f e o g i t e c n r l r Ot e wie t eI C S f n to s mu tb i lt d b o t r . n t i a e ,h b s p o o o n t i h o t o l . h r s 。h u c in s e smu a e y s f wa e I h s p p r t e IC u r t c l d ist e a me— o d ra e a a y e tf s . e t p r a h s f ri lme t g t eI C b s o e a i n i sr c i n n e h r e r n l z d a i t Th n,wo a p o c e o mpe n i h u p r t t u to su d r e ARM ¥ C4 1 r n o n t 3 5O p o e s ra e gv n An e a l a e n smu a i n i l s r t d a a t r c s o r i e . x mp e b s d o i lt Si u ta e tls . o l Ke wo d : C; mb d e y t m ; y rsI e e d d s s e ARM ; o t r i lt n s fwa e smu a i o
(完整版)PCIe协议相关资料
1.PCIe简介PCI-Express是最新的总线和接口标准,它原来的名称为“3GIO”,是由英特尔提出的,很明显英特尔的意思是它代表着下一代I/O接口标准。
交由PCI-SIG(PCI特殊兴趣组织)认证发布后才改名为“PCI—Express"。
这个新标准将全面取代现行的PCI和AGP,最终实现总线标准的统一。
它的主要优势就是数据传输速率高,目前最高可达到10GB/s以上,而且还有相当大的发展潜力。
PCI Express也有多种规格,从PCI Express 1X 到PCI Express 16X,能满足现在和将来一定时间内出现的低速设备和高速设备的需求。
能支持PCI Express 的主要是英特尔的i915和i925系列芯片组.PCI Express(以下简称PCI—E)采用了目前业内流行的点对点串行连接,比起PCI以及更早期的计算机总线的共享并行架构,每个设备都有自己的专用连接,不需要向整个总线请求带宽,而且可以把数据传输率提高到一个很高的频率,达到PCI所不能提供的高带宽。
相对于传统PCI总线在单一时间周期内只能实现单向传输,PCI—E的双单工连接能提供更高的传输速率和质量,它们之间的差异跟半双工和全双工类似。
PCI—E的接口根据总线位宽不同而有所差异,包括X1、X4、X8以及X16,而X2模式将用于内部接口而非插槽模式。
PCI—E规格从1条通道连接到32条通道连接,有非常强的伸缩性,以满足不同系统设备对数据传输带宽不同的需求.此外,较短的PCI—E卡可以插入较长的PCI—E插槽中使用,PCI-E接口还能够支持热拔插,这也是个不小的飞跃。
PCI-E X1的250MB/秒传输速度已经可以满足主流声效芯片、网卡芯片和存储设备对数据传输带宽的需求,但是远远无法满足图形芯片对数据传输带宽的需求。
因此,用于取代AGP接口的PCI-E接口位宽为X16,能够提供5GB/s的带宽,即便有编码上的损耗但仍能够提供约为4GB/s左右的实际带宽,远远超过AGP 8X的2。
3.3v iic上拉电阻阻值
3.3v iic上拉电阻阻值在设计电子电路中,为了使I²C总线正常工作,需要在I²C数据线上拉高电平。
在 3.3V I²C系统中,我们需要选择合适的上拉电阻阻值,以确保电路的可靠性和稳定性。
本文将介绍3.3V I²C上拉电阻阻值的选取方法和相关考虑因素。
首先,我们需要了解I²C总线的工作原理。
I²C(Inter-Integrated Circuit)是一种串行通信协议,用于连接集成电路芯片之间的通信。
在I²C总线上,通信由一个主设备(Master)和一个或多个从设备(Slave)组成。
主设备通过I²C总线发送数据和指令给从设备,并接收从设备返回的数据。
在I²C总线上,数据线(SDA线)和时钟线(SCL线)是两条关键的线路。
数据线用于传输数据,时钟线用于同步数据传输的时序。
在数据传输过程中,低电平表示逻辑1,高电平表示逻辑0。
为了确保I²C总线上的数据正确传输,SDA线上的电平必须稳定。
在I²C总线空闲状态下,SDA线被上拉电阻连接到正电源电压(Vcc)。
当SDA线传输逻辑0时,SDA线将被连接到地线。
3.3V I²C系统中,常用的上拉电阻阻值为4.7kΩ或者10kΩ。
选取上拉电阻阻值的主要目的是确保SDA线上的电平稳定,并且能够适应总线上的电容负载。
首先,我们来看一下上拉电阻阻值为4.7kΩ时的情况。
在3.3V供电情况下,当SDA线拉低时,上拉电阻将会产生一个电流,通过这个电流和上拉电阻的阻值,我们可以计算出SDA线上的电平下降时间。
电平下降时间越短,数据传输速率越高。
然而,较小的电流和较小的上拉电阻阻值会增加总线的功耗。
相反,当SDA线拉高时,上拉电阻将会产生一个与总线上的电容负载共同决定的充电时间常数。
如果上拉电阻阻值过大,充电时间会变长,导致SDA线上电平升高速度较慢,从而限制了I²C总线的最大工作频率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
竭诚为您提供优质文档/双击可除
i方c总线协议
篇一:i2c总线协议
1.i2c协议
2条双向串行线,一条数据线sda,一条时钟线scl。
sda传输数据是大端传输,每次传输8bit,即一字节。
支持多主控(multimastering),任何时间点只能有一个主控。
总线上每个设备都有自己的一个addr,共7个bit,广播地址全0.
系统中可能有多个同种芯片,为此addr分为固定部分和可编程部份,细节视芯片而定,看datasheet。
1.1i2c位传输
数据传输:scl为高电平时,sda线若保持稳定,那么sda上是在传输数据bit;
若sda发生跳变,则用来表示一个会话的开始或结束(后面讲)数据改变:scl为低电平时,sda线才能改变传输的
bit
1.2i2c开始和结束信号
开始信号:scl为高电平时,sda由高电平向低电平跳变,开始传送数据。
结束信号:scl为高电平时,sda由低电平向高电平跳变,结束传送数据。
1.3i2c应答信号
master每发送完8bit数据后等待slave的ack。
即在第9个clock,若从ic发ack,sda会被拉低。
若没有ack,sda会被置高,这会引起master发生RestaRt或stop流程,如下所示:
1.4i2c写流程
写寄存器的标准流程为:
1.master发起staRt
2.master发送i2caddr(7bit)和w操作0(1bit),等待ack
3.slave发送ack
4.master发送regaddr(8bit),等待ack
5.slave发送ack
6.master发送data(8bit),即要写入寄存器中的数据,等待ack
7.slave发送ack
8.第6步和第7步可以重复多次,即顺序写多个寄存器
9.master发起stop
写一个寄存器
写多个寄存器
1.5i2c读流程
读寄存器的标准流程为:
1.master发送i2caddr(7bit)和w操作1(1bit),等待ack
2.slave发送ack
3.master发送regaddr(8bit),等待ack
4.slave发送ack
5.master发起staRt
6.master发送i2caddr(7bit)和r操作1(1bit),等待ack
7.slave发送ack
8.slave发送data(8bit),即寄存器里的值
9.master发送ack
10.第8步和第9步可以重复多次,即顺序读多个寄存器读一个寄存器
读多个寄存器
2.powerpc的i2c实现
mpc8560的ccsR中控制i2c的寄存器共有6个。
2.1i2cadR地址寄存器
cpu也可以是i2c的slave,cpu的i2c地址有i2cadR 指定
2.2i2cFdR频率设置寄存器
theserialbitclockfrequencyofsclisequaltotheccbclock dividedbythedivider.
用来设置i2c总线频率
篇二:i2c总线协议详解
i2c总线协议详解
i2c总线定义
--------------------------------------------------------------------------------
i2c(inter-integratedcircuit)总线是一种由
philips公司开发的两线式串行总线,用于连接微控制器及其外围设备。
i2c总线产生于在80年代,最初为音频和视频设备开发,如今主要在服务器管理中使用,其中包括单个组件状态的通信。
例如管理员可对各个组件进行查询,以管理系统的配置或掌握组件的功能状态,如电源和系统风扇。
可随时监控内存、硬盘、网络、系统温度等多个参数,增加了系统的安全性,方便了管理。
i2c总线特点
---------------------------------------------------
-----------------------------
i2c总线最主要的优点是其简单性和有效性。
由于接口
直接在组件之上,因此i2c总线占用的空间非常小,减少了电路板的空间和芯片管脚的数量,降低了互联成本。
总线的长度可高达25英尺,并且能够以10kbps的最大传输速率支持40个组件。
i2c总线的另一个优点是,它支持多主控(multimastering),其中任何能够进行发送和接收的设备都可以成为主总线。
一个主控能够控制信号的传输和时钟频率。
当然,在任何时间点上只能有一个主控。
i2c总线工作原理
---------------------------------------------------
-----------------------------
总线的构成及信号类型
---------------------------------------------------
-----------------------------
i2c总线是由数据线sda和时钟scl构成的串行总线,
可发送和接收数据。
在cpu与被控ic之间、ic与ic之间进行双向传送,最高传送速率100kbps。
各种被控制电路均并
联在这条总线上,但就像电话机一样只有拨通各自的号码才能工作,所以每个电路和模块都有唯一的地址,在信息的传输过程中,i2c总线上并接的每一模块电路既是主控器(或被控器),又是发送器(或接收器),这取决于它所要完成的功能。
cpu发出的控制信号分为地址码和控制量两部分,地址码用来选址,即接通需要控制的电路,确定控制的种类;控制量决定该调整的类别(如对比度、亮度等)及需要调整的量。
这样,各控制电路虽然挂在同一条总线上,却彼此独立,互不相关。
i2c总线在传送数据过程中共有三种类型信号,它们分别是:开始信号、结束信号和应答信号。
开始信号:scl为高电平时,sda由高电平向低电平跳变,开始传送数据。
结束信号:scl为高电平时,sda由低电平向高电平跳变,结束传送数据。
应答信号:接收数据的ic在接收到8bit数据后,向发送数据的ic发出特定的低电平脉冲,表示已收到数据。
cpu 向受控单元发出一个信号后,等待受控单元发出一个应答信号,cpu接收到应答信号后,根据实际情况作出是否继续传递信号的判断。
若未收到应答信号,由判断为受控单元出现故障。
这些信号中,起始信号是必需的,结束信号和应答信号,
都可以不要。
目前有很多半导体集成电路上都集成了i2c接口。
带有
i2c接口的单片机有:cygnal的c8051F0xx系列,
philipsp87lpc7xx系列,micRochip的pic16c6xx系列等。
很多外围器件如存储器、监控芯片等也提供i2c接口i2c总线是一种用于ic器件之间连接的双向二线制总线,所谓总线它上面可以挂多个器件,并且通过两根线连接,占用空间非常的小,总线的长度可长达25英尺,并且能够以
10kbps的最大传输速率支持4个组件。
它的另一优点是多主控,只要能够进行接收和发送的设备都可以成为主控制器,当然多个主控不能同一时间工作。
i2c总线有两根信号线,一根为sda(数据线),一根为scl(时钟线)。
任何时候时钟信号都是由主控器件产生。
i2c总线操作
---------------------------------------------------
-----------------------------
i2c规程运用主/从双向通讯。
器件发送数据到总线上,则定义为发送器,器件接收数据则定义为接收器。
主器件和从器件都可以工作于接收和发送状态。
总线必须由主器件(通常为微控制器)控制,主器件产生串行时钟(scl)控
制总线的传输方向,并产生起始和停止条件。
sda线上的数
据状态仅在scl为低电平的期间才能改变,scl为高电平的期间,sda状态的改变被用来表示起始和停止条件。
控制字节
在起始条件之后,必须是器件的控制字节,其中高四位为器件类型识别符(不同的芯片类型有不同的定义,eepRom 一般应为1010),接着三位为片选,最后一位为读写位,当为1时为读操作,为0时为写操作。
写操作
写操作分为字节写和页面写两种操作,对于页面写根据芯片的一次装载的字节不同有所不同。
读操作
读操作有三种基本操作:当前地址读、随机读和顺序读。
图4给出的是顺序读的时序图。
应当注意的是:最后一个读操作的第9个时钟周期不是“不关心”。
为了结束读操作,主机必须在第9个周期间发出停止条件或者在第9个时钟周期内保持sda为高电平、然后发出停止条件。
i2c总线应用
--------------------------------------------------------------------------------
目前有很多半导体集成电路上都集成了i2c接口。
带有i2c接口的单片机有:cygnal的c8051F0xx系列,三星的。