共轴旋翼机功率计算
100kg载荷多旋翼 参数

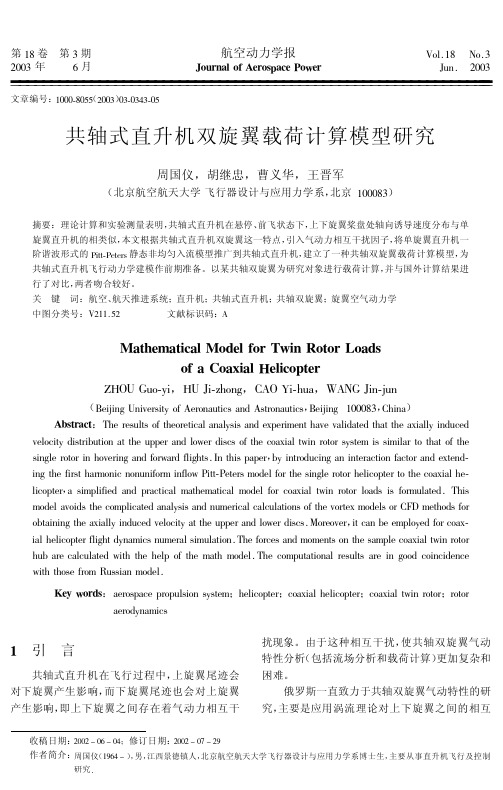
100kg载荷多旋翼参数1 前言一套完整的共轴双旋翼无人直升机系统一般有7个系统组成,包括:直升机平台,飞控系统,动力系统,舵机系统,数据链系统,地面站系统,载荷系统。
本文主要是针对共轴双旋翼无人直升机平台的构造及设计进行了简要的阐述。
2 概述“共轴双旋翼无人直升机具有绕同一理论轴线一正一反旋转的上下两副旋翼,由于转向相反,两副旋翼产生的扭矩在航向不变的飞行状态下相互平衡,通过所谓的上下旋翼总距差动产生不平衡扭矩可实现航向操纵,共轴双旋翼在直升机的飞行中,既是升力面又是纵横向和航向的操纵面。
”图1 共轴双旋翼无人直升机3 共轴双旋翼无人直升机总体设计3.1 主要参数分析与选择共轴双旋翼无人直升机平台的主要参数是总体方案的设计变量,它对直升机的性能有着决定性的影响。
因此,在直升机平台总体设计的初始阶段就要严密地进行参数选择,直升机平台总体设计参数关系到平台的飞行性能,飞行品质,气动,结构等参数。
是属于顶层设计。
对平台关键性指标起着决定性作用,同时也需要结合底层细节设计的数据相互验证,反复迭代。
直升机平台的主要参数包括,直升机总重,桨盘载荷,功率载荷,旋翼实度,和桨尖速度等。
3.1.1桨盘载荷的选择及方法桨盘载荷的定义:旋翼的拉力与旋翼桨盘面积之比。
式中,p 表示桨盘载荷,G表示直升机重量,R表示旋翼半径。
p=G/(πR²)桨盘载荷应在保证直升机平台所要求的有效载荷及性能的前提下,使直升机平台的有效载荷在总重中所占比例最大。
在具体设计时,参考与所设计直升机相近的现有直升机平台的统计数据,根据设计的具体情况来确定,一般可以遵循以下的原则:1.直升机总重量越大,桨盘载荷也应选得越大,一方面,总重较大时,往往选取更大的能获得较高的有效载荷,另一方面,对于总重较大的直升机。
如果p选得不够大,旋翼直径就会过大,在总体布置,使用等方面将引起相应问题。
2.采用涡轮轴发动机时,桨盘载荷可以选得大一些。
这样也可以获得较大的有效载荷。
共轴双旋翼悬停状态气动参数优化计算

共轴双旋翼悬停状态气动参数优化计算陈金鹤;刘长文;汪正中【摘要】This paper presented a methods which optimal coaxial rotor geometry be calculated in hover.The aerodynamic loads were solved by blade element momentum theory(BEMT) with mutually induced inflow.Nonlinear program based on computational procedures of aerodynamic load was developed,to solve it by spare sequential Quadratic programming(SQP).The result of this methodology represented that when coaxial rotor thrust coefficient is ,CT=0.004,the rotor power coefficient based on linear or nonlinear twist is no difference,however figure of merit of coaxial system can be improved significantly by 18.4%,which optimal chord distribution on coaxial rotor system.%基于动量叶素理论(BEMT),计入共轴双旋翼的线性气动干扰模型,建立轴流状态下的气动布局参数非线性规划模型,采用二次序列规划算法(SQP)进行优化计算.结果表明共轴双旋翼拉力系数CT=0.004时,线性、非线性扭转的需用功率基本无差别;基于Harrington 旋翼2,弦长优化能够有效提升旋翼悬停效率.【期刊名称】《直升机技术》【年(卷),期】2017(000)002【总页数】5页(P1-5)【关键词】气动干扰;气动参数;优化计算【作者】陈金鹤;刘长文;汪正中【作者单位】中国直升机设计研究所,直升机旋翼动力学重点实验室,江西景德镇333001;中国直升机设计研究所,直升机旋翼动力学重点实验室,江西景德镇333001;中国直升机设计研究所,直升机旋翼动力学重点实验室,江西景德镇333001【正文语种】中文【中图分类】V212.11悬停时,共轴双旋翼上下旋翼之间存在气动干扰现象,其中上旋翼对下旋翼诱导干扰的影响起着主要作用。
共轴式直升机双旋翼载荷计算模型研究
下旋翼桨叶挥舞运动方程 根据桨叶上诸力矩代数和应为零的条件, 利 ' a Ol a Ol a Ol a D a ' ll + K a ll = F ll + l l l ' ll b ll b b ll
线性扭转, 桨叶质量沿展向均匀分布, 且运动过程 是刚性的; (2)桨叶挥舞角和入流角均为小量, 桨 叶翼型气动力采用准定常线性假设; ( 3)不考虑 桨尖损失和反流区, 并忽略压缩性和失速效应; (4)不计桨叶的摆振运动; (5)旋翼力和力矩是周 期平均值, 不考虑其周期效应。 !"! 共轴双旋翼非均匀入流模型 下、 上旋翼桨叶挥舞角和变距角的一阶谐波 形式为: ( ( I )- a ll ( I )cos ( I )sin l I )= a 0l ! " - b ll " r #l = #0l2 + #0l + R #I - Al cos " - Bl sin " ( ( I )- a l2 ( I )cos ( I )sin 2 I )= a 02 ! " - b l2 " r #2 = #0l2 + R #I -( - Al)cos " - Bl sin " (l)
Mathematical Model for Twin Rotor Loads of a Coaxial Helicopter
ZHOU Guo-yi, HU Ji-zhong, CAO Yi-hua,WANG Jin-jun
( Beijing University of Aeronautics and Astronautics, Beijing 100083, China) Abstract: The resuIts of theoreticaI anaIysis and experiment have vaIidated that the axiaIIy induced veIocity distribution at the upper and Iower discs of the coaxiaI twin rotor system is simiIar to that of the singIe rotor in hovering and forward fIights . In this paper, by introducing an interaction factor and extending the first harmonic nonuniform infIow Pitt-Peters modeI for the singIe rotor heIicopter to the coaxiaI heIicopter, a simpIified and practicaI mathematicaI modeI for coaxiaI twin rotor Ioads is formuIated . This modeI avoids the compIicated anaIysis and numericaI caIcuIations of the vortex modeIs or CFD methods for obtaining the axiaIIy induced veIocity at the upper and Iower discs . Moreover, it can be empIoyed for coaxiaI heIicopter fIight dynamics numeraI simuIation . The forces and moments on the sampIe coaxiaI twin rotor hub are caIcuIated with the heIp of the math modeI . The computationaI resuIts are in good coincidence with those from Russian modeI . Key words: aerospace propuIsion system;heIicopter;coaxiaI heIicopter;coaxiaI twin rotor;rotor aerodynamics
07旋翼飞行器技术

悬停和垂直飞行
1. 悬停 需用功率: 地面效应
P悬= 停P诱导 P型阻
发动机可用功率
垂直上升
需用功率: P 垂 = 直 P 诱 导 P 型 阻 P 爬升
垂直下降
需用功率: P 下 = 降 P 诱 导 P 型 阻 P 下降 涡环状态
飞机: 升力面:机翼; 操纵面:升降舵、方向舵、襟副翼; 推进器: 螺旋桨、喷气发动机; 气动效率较高;需要跑道;飞行速 度大;升限高;寿命较长;载重大, 经济性好;平稳舒适;操纵容易, 稳定性好;
直升机构造特点
桨穀 桨叶 自动倾斜器 尾桨 机身 起落架 传动系统
拉扭式桨穀构造
1923 年,Juan de la Cierva 在 设计旋翼机时,无意 中解决了直升机的一个重大问题,他发明的挥舞 铰解决了困扰直升机旋翼设计的一个重大问题;
1930 年 10 月,意大利人 Corradino D‘Ascanio 设计 的共轴反转双桨直升机是公认的第一架现代意义 上的直升机,在 18 米高度上前飞了 800 多米的距 离;
CH-47
米-12
一、直升机的发展历史
公元4世纪我国晋代一书《抱朴子》 “竹蜻蜓” 中国陀螺(chinese top)
公元15世纪 意大利 科学家达芬奇 画,最早的直升机设计方案;
本世纪30年代 德国、法国、美国 载人直升机
1923年西班牙人J·西尔瓦发明铰接式旋翼
定翼飞机
腾空而起(鸟)
莱特兄弟发明飞机; 需要跑道(草地、缓坡) “正规”的混凝土跑道
起飞 、着陆; 飞机的滑跑速度、重量
和对跑道的冲击, 要求 有增无减; 连简易跑道也是高速公 路等级的。 现代战斗机和其他高性 能军用飞机对平整、坚 固的长跑道的需求增加
共轴双旋翼有限元模型-概述说明以及解释

共轴双旋翼有限元模型-概述说明以及解释1.引言1.1 概述共轴双旋翼是一种特殊的旋翼飞行器,它由两个同心的旋翼组件构成,呈现出类似于直升机的外形。
在共轴双旋翼中,两个旋翼以相同的转速和相反的旋转方向运转,从而产生对称的升力和推力。
这种双旋翼设计旨在提供更高的稳定性和操纵性,以满足特定任务需求。
与传统的单旋翼直升机相比,共轴双旋翼具有一些独特的优点。
首先,共轴双旋翼的设计可以提供更大的升力和操纵力矩,使得其在特定任务下具有更好的性能表现。
其次,由于旋翼叶片之间的相互干扰较小,共轴双旋翼可以降低噪音和振动水平,提供更加舒适的飞行体验。
此外,共轴双旋翼还具备更高的安全性能和较低的飞行成本,这使得它在军事、民用和应急救援等领域具有广泛的应用前景。
然而,要深入研究和分析共轴双旋翼的工作原理和性能特点,需要建立相应的数学模型和工程模拟。
在本文中,将重点介绍共轴双旋翼的有限元模型,该模型是通过将旋翼和飞行器结构离散为有限数量的小单元进行建模。
有限元模型可以更加全面地考虑旋翼的刚性、变形和空气动力学特性,并对结构的受力、振动和疲劳寿命等关键问题进行有效分析。
本文将首先介绍共轴双旋翼的基本原理和组成结构,包括旋翼叶片、轴系、驱动装置等关键部件。
然后,结合有限元方法的原理与技术,详细探讨了共轴双旋翼有限元模型的建立过程和应用场景。
最后,通过对模型的有效性和可靠性评价,对其在实际工程中的应用前景进行了展望,并提出了进一步研究和改进的建议。
通过本文的研究,我们可以更好地理解共轴双旋翼的运行机理和特性,为后续设计和优化工作提供技术支持和理论指导。
同时,本文的研究成果还将为旋翼飞行器领域的发展做出重要贡献,推动相关技术的进步和创新。
1.2文章结构文章结构部分的内容如下所示:1.2 文章结构本文将按照以下结构进行论述:1. 引言:在引言部分,将对共轴双旋翼有限元模型的研究背景和意义进行概述,以及论文的目的和研究方法进行简要介绍。
飞机螺旋桨的功率怎样计算
电机KV值:电机的转速(空载)=KV值X电压;例如KV1000的电机在10V电压下它的转速(空载)就是10000转/分钟。
电机的KV值越高,提供出来的扭力就越小。
所以,KV值的大小就与浆有着密切的关系,以下就这点提供一下配浆经验:1060浆,10代表长的直径是10寸,60表示浆角(螺距).前两位数表示直径,后两位表示螺距。
电池的放电能力,最大持续电流是:容量X放电C数例如:1500MA,10C, 则最大的持续电流就是=1.5X10=15安如果该电池长时间超过15安或以上电流工作,那么电池的寿命会变短、还有电池的充满电压单片4.15-4.20合适,用后的最低电压为单片3.7以上(切记不要过放),长期不用的保存电压最好为3.9。
一般电机与浆是这样配的:3S电池下;KV900-1000的电机配1060或1047浆,9寸浆也可KV1200-1400配9050(9寸浆)至8*6浆KV1600-1800左右的7寸至6寸浆KV2200-2800左右的5寸浆KV3000-3500左右的4530浆2S电池下;KV1300-1500左右用9050浆KV1800左右用7060浆KV2500-3000左右用5X3浆KV3200-4000左右用4530浆浆的大小与电流关系:因为浆相对越大在产生推力的效率就越高例如:同用3S电池,电流同样是10安(假设)用KV1000配1060浆与KV3000配4530浆它们分别产生的推力前者是后者的两倍。
机型与电机、浆的关系:一般来说:浆越大对飞机所产生的反扭力越大,所以浆的大小与机的翼展大小有着一定关系,但浆与电机也有着上面所讲的关系。
例如用1060浆,机的翼展就得要在80CM以上为合适,不然的话机就容易造成反扭;又如用8*6的浆翼展就得在60以上。
再比如:用4530浆做翼展1米以上机行否?是可以,但飞机飞起来会很耗电,因为翼展大飞行的阻力大,而4530浆产生的推力相对情况下小(上面浆的大小与电流关系有讲到)。
(完整word版)船用螺旋桨的功率计算
船用螺旋桨的功率计算功率(W)直径(D)螺距(P)转/分(N)功率(W)=(D/10)的4次方*(P/10)*(N/1000)的3次方*0。
45速度(SP)km/h=(P/10)*(N/1000)*15.24静止推力(Th)g=(D/10)的3次方*(P/10)*(N/1000)的2次方*22船用螺旋桨的工作原理可以把螺旋桨看成是一个一面旋转一面前进的机翼进行讨论。
流经桨叶各剖面的气流由沿旋转轴方向的前进速度和旋转产生的切线速度合成。
在螺旋桨半径r1和r2(r1〈r2)两处各取极小一段,讨论桨叶上的气流情况.V—轴向速度;n—螺旋桨转速;φ-气流角,即气流与螺旋桨旋转平面夹角;α—桨叶剖面迎角;β—桨叶角,即桨叶剖面弦线与旋转平面夹角.显而易见β=α+φ。
空气流过桨叶各小段时产生气动力,阻力ΔD和升力ΔL,合成后总空气动力为ΔR。
ΔR沿飞行方向的分力为拉力ΔT,与旋螺桨旋转方向相反的力ΔP 阻止螺旋桨转动。
将整个桨叶上各小段的拉力和阻止旋转的力相加,形成该螺旋桨的拉力和阻止螺旋桨转动的力矩。
从以上两图还可以看到。
必须使螺旋桨各剖面在升阻比较大的迎角工作,才能获得较大的拉力,较小的阻力矩,也就是效率较高。
螺旋桨工作时。
轴向速度不随半径变化,而切线速度随半径变化。
因此在接近桨尖,半径较大处气流角较小,对应桨叶角也应较小。
而在接近桨根,半径较小处气流角较大,对应桨叶角也应较大。
螺旋桨的桨叶角从桨尖到桨根应按一定规律逐渐加大。
所以说螺旋桨是一个扭转了的机翼更为确切。
从图中还可以看到,气流角实际上反映前进速度和切线速度的比值。
对某个螺旋桨的某个剖面,剖面迎角随该比值变化而变化。
迎角变化,拉力和阻力矩也随之变化。
用进矩比“J”反映桨尖处气流角,J=V/nD。
式中D-螺旋桨直径。
理论和试验证明:螺旋桨的拉力(T),克服螺旋桨阻力矩所需的功率(P)和效率(η)可用下列公式计算:T=Ctρn2D4 P=Cpρn3D5 η=J·Ct/Cp 式中:Ct—拉力系数;Cp—功率系数;ρ—空气密度;n—螺旋桨转速;D-螺旋桨直径。
分析两台不同起重机做功情况
整理课件
平均功率和瞬时功率
1、求平均功率
PW t
P Fv
2、求瞬时功率 Pt F vt
整理课件
小结
1.功率是表示物体做功快慢的物理量。
定义式: p w
平均功率
t
瞬时功率
功率的单位:W、KW
2 .额定功率和实际功率 的区别
力F所做的功:
W=FLlFra bibliotek力F的在时间t功率 : P W t
又由L=vt 得 P=FV
整理课件
讨论: P Fv
PF v表示的是平均功率还是瞬时功率?
v
平均功率 p F v(v 是平均速度)
瞬时功率 P Fv( v 是瞬时速度)
整理课件
• 例2、在倾角为θ的斜面上,有一质量为m的 物体沿斜面下滑,当物体的速度大小为v时, 重力的瞬时功率为多大?
分析两台不同起重机的做功情况
1
1
第
台
起
1
重 机 在
吨 的 货
分 钟 内
2
物 提 到
把米
的
高
度
.
W=Flcosα
1
2
第
台
1
起
重吨
机的
在货
物
分提
钟到
内 把
4
米 的
高
度
.
整理课件
分析两台不同起重机的做功情况
2
1
第 台 起 重 机吨 在的
货 分物 钟提 内到 把米
的 高 度
.
4
1
整理课件
30
3
另
台
轴功率和电机功率关系公式
轴功率和电机功率关系公式
轴功率和电机功率的关系是一个重要的物理概念,在工程和科学领域中具有广泛的应用。
轴功率是指在旋转轴上的功率输出,而电机功率是指电机输入或输出的功率。
两者之间的关系可以通过以下公式来描述:
轴功率 = 电机功率 * 传动效率
其中,传动效率是指电机输出功率与电机输入功率之间的比值。
传动效率通常表示为百分比,可以通过实验或计算得出。
轴功率和电机功率的关系可以用一个简单的例子来说明。
假设有一台电机,其输入功率为1000瓦特,传动效率为90%。
根据上述公式,轴功率可以计算如下:
轴功率 = 1000瓦特 * 0.9 = 900瓦特
这意味着电机在传动过程中损失了10%的功率,最终只有900瓦特的功率输出到轴上。
轴功率和电机功率的关系对于设计和优化电机系统非常重要。
通过提高传动效率,可以增加轴功率的输出,从而提高系统的效率和性能。
因此,在电机系统设计中,需要考虑传动效率和轴功率的关系,并选择适当的传动方式和组件,以实现最佳的工作效果。
轴功率和电机功率之间的关系是通过传动效率来描述的,通过合理
设计和优化电机系统,可以提高轴功率的输出,从而提高系统的效率和性能。
这对于工程和科学领域的专业人士来说是一个重要的概念,也是实际应用中需要考虑的因素之一。
21-微型共轴双旋翼气动性能计算分析研究-高卓飞-6
第二十六届(2010)全国直升机年会论文微型共轴双旋翼气动性能计算分析研究高卓飞1胡立芃2唐正飞1(1.南京航空航天大学直升机旋翼动力学重点实验室,南京,210016)(2.中国人民解放军61769部队,山西文水,032103)摘要:本文建立了一套微型共轴双旋翼的悬停气动性能计算方法。
首先运用计算流体力学(CFD)方法,计算了翼型在低雷诺数下的升阻特性。
运用动量/叶素理论方法,结合翼型在低雷诺数下升阻特性,对微型共轴双旋翼的悬停性能做了理论分析与计算,并对所得出的计算结果进行了实验论证。
关键字:微型共轴双旋翼;翼型;CFD;动量-叶素引言微型旋翼飞行器因具有特殊的飞行性能及在军、民用领域内独特的应用优势,正越来越受到各国科研机构及部门的重视。
按照平衡旋翼反扭矩的方式,微型旋翼飞行器的构造形式可分为:单旋翼带尾桨式、共轴双旋翼式、四旋翼式。
在这几种结构形式中,共轴双旋翼式悬停和中速飞行效率高、结构紧凑、尺寸小;由于没有尾桨,降低了机械复杂性,且不存在来自尾桨的故障等优点,使其成为微型旋翼飞行器机型中的一个研究热点。
开展微型共轴双旋翼飞行器相关技术的研究具有十分重要的意义。
微型旋翼气动特性分析是微型飞行器研究的一项关键技术,也是开展微型共轴双旋翼飞行器的技术研究的基础之一。
美国马里兰大学通过“MICOR”飞行器的研制,已针对微型共轴双旋翼的气动特性开展了许多研究,包括实验研究及计算分析。
在实验研究方面,Bohorquez[1]等人设计了微型共轴旋翼气动性能测量实验装置,通过调节上、下旋翼安装角、旋翼转速及两旋翼间的间距,对不同状态下的微型旋翼气动性能进行了测量。
在数值模拟方面,Lakshminarayan[2]采用嵌套网格的CFD 计算方法计算了微型共轴双旋翼悬停流场。
在理论计算方面,Bohorquez[3]建立了微型共轴双旋翼悬停气动性能的动量叶素理论方法计算模型,并对计算结果进行了实验验证。
随着国内微型共轴双旋翼飞行器工作的展开,迫切需要对微型共轴旋翼气动特性分析方法进行研究。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
“XXX ”共轴双旋翼飞行器升力/功率计算报告
一、报告目的
讨论在“XXX ”定总重为50kg/60kg 时,需用功率计算方法以及功率与旋翼直径的关系。
二、计算方法
给定参考参数:
起飞重量50kg/60kg ,旋翼转速3000RPM ,参考总距8.5deg 。
本机型实现悬停高度6m ,因此不考虑大气密度变化,不考虑发动机的高度特性。
对于共轴双旋翼,由于上下旋翼的相互干扰,悬停时,相同发扭矩(功耗)下旋翼的升力大约是上旋翼的86%。
计算需用功率时,考虑到双旋翼功率影响,总功率P=2×P 上×1.219。
参考公式如下(参考《直升机气动力手册(上卷)》P14):
2
G G
p R
π=
T G p K p ⊥=
T F K G C f ⊥=
且 2200
1()()2F f R R ρ
ρπρ=Ω 703T
y T C C k σκ
=
10v -
=
071
4
Kx p x m k C σ=
100Ki T m J v C -
=
Kb Kb m m σσ⎛⎫= ⎪⎝⎭
K Kx Ki Kb m m m m =++
xu sj N K N f m = 且 2300
11()()752N f R R ρ
ρπρ=
⨯Ω
xu sj
xu N N ζ
=
其中,K ⊥为垂直吹风增重系数,范围在1.02~1.05之间;0ρ为标准大气密度,
ρρ是所在海拔出相对大气密度,近似为1;7y C 为升力系数,σ为桨叶实度,0T k 为拉力修正系数,范围0.95~0.98,κ为叶端损失系数;10v -
为诱导速度;Kx m 、Ki m 、Kb m 分别为型阻功率、诱阻功率和临街马赫功率(近似为0);0p k 为型阻修正系数,取1.0~1.1;0J 为诱导功率修正系数,取值1.05~1.10;ζ为功率损失系数,常用0.8左右。
三、具体内容
本章主要讨论,不同直径下,产生相同升力(即总重一定时)的需用功率。
悬停时,升力抵消总重,给出不同直径下,上下旋翼需用功率的曲线。
具体总重分配:G 上=G×(1/1.86),G 下=G×(0.86/1.86)。
图3.1 总重50kg ,上旋翼直径-需用功率曲线
图3.2总重50kg,下旋翼直径-需用功率曲线
图3.3 总重60kg,上旋翼直径-需用功率曲线
图3.4总重60kg,下旋翼直径-需用功率曲线
此外,计算中还额外发现,随着总重的增加,极值点是向着直径增大方向移动的。
初步结论:
如图3.1、3.2所示,在总重50kg时,上旋翼在直径1.2m处所需功率最小,而下旋翼则是在1.13m左右所需功率最小。
并且,假如总重增加,如图3.1、3.2、3.3以及3.4所示,最小需用功率的极值点是后移的。
因此,旋翼直径应选在1.13到1.2m之间;考虑到总重变大,则旋翼直径相对增大,假如总重减小,则需相对减小直径。
四、结论
本文用理论的方法计算了不同旋翼直径下的功率特性。
虽然无法确切地获取功率的值,但可以得到以下两个结论:
(1)在一定总重下,旋翼直径在一定范围内是可以保证需用功率最小。
对于50kg的飞行器,这个最有范围是1.13m到1.2m之间,并且范围随总重增减而前后移动。
(2)增加总重肯定会导致需用功率增加。
以总重50kg为例,下面给出理论计算的一些数据结果:
表4.1 计算数据。