无刷直流电机控制系统设计及仿真
一种基于Matlab的无刷直流电机控制系统建模仿真方法

一种基于Matlab的无刷直流电机控制系统建模仿真方法一、本文概述无刷直流电机(Brushless DC Motor, BLDC)以其高效率、低噪音、长寿命等优点,在航空航天、电动汽车、家用电器等领域得到广泛应用。
为了对无刷直流电机控制系统进行性能分析和优化,需要建立精确的数学模型并进行仿真研究。
Matlab作为一种强大的数学计算和仿真软件,为无刷直流电机控制系统的建模仿真提供了有力支持。
二、无刷直流电机控制系统原理1、无刷直流电机基本结构和工作原理无刷直流电机(Brushless Direct Current Motor,简称BLDCM)是一种基于电子换向技术的直流电机,其特点在于去除了传统直流电机中的机械换向器和电刷,从而提高了电机的运行效率和可靠性。
无刷直流电机主要由电机本体、电子换向器和功率驱动器三部分组成。
电机本体通常采用三相星形或三角形接法,其定子上分布有多个电磁铁(也称为线圈),而转子上则安装有永磁体。
当电机通电时,定子上的电磁铁会产生磁场,与转子上的永磁体产生相互作用力,从而驱动转子旋转。
电子换向器是无刷直流电机的核心部分,通常由霍尔传感器和控制器组成。
霍尔传感器安装在电机本体的定子附近,用于检测转子位置,并将位置信息传递给控制器。
控制器则根据霍尔传感器提供的位置信息,控制功率驱动器对定子上的电磁铁进行通电,从而实现电机的电子换向。
功率驱动器负责将控制器的控制信号转换为实际的电流,驱动定子上的电磁铁工作。
功率驱动器通常采用三相全桥驱动电路,具有输出电流大、驱动能力强等特点。
无刷直流电机的工作原理可以简单概括为:控制器根据霍尔传感器检测到的转子位置信息,控制功率驱动器对定子上的电磁铁进行通电,产生磁场并驱动转子旋转;随着转子的旋转,霍尔传感器不断检测新的转子位置信息,控制器根据这些信息实时调整电磁铁的通电状态,从而保持电机的连续稳定运行。
由于无刷直流电机采用电子换向技术,避免了传统直流电机中机械换向器和电刷的磨损和故障,因此具有更高的运行效率和更长的使用寿命。
无刷直流电机控制系统设计与实现
无刷直流电机控制系统设计与实现一、本文概述随着科技的不断进步和电机技术的快速发展,无刷直流电机(Brushless Direct Current, BLDC)因其高效率、低噪音、长寿命等优点,在电动工具、航空航天、汽车电子、家用电器等多个领域得到了广泛应用。
然而,要实现无刷直流电机的高效、稳定运行,离不开先进且可靠的控制系统。
本文旨在对无刷直流电机控制系统的设计与实现进行深入探讨,分析控制策略、硬件构成和软件编程,并结合实例,详细阐述控制系统在实际应用中的表现与优化方向。
通过本文的研究,希望能够为相关领域的学者和工程师提供有价值的参考,推动无刷直流电机控制系统技术的进一步发展和应用。
二、无刷直流电机基本原理无刷直流电机(Brushless DC Motor, BLDCM)是一种采用电子换向器代替传统机械换向器的直流电机。
其基本工作原理与传统的直流电机相似,即利用磁场与电流之间的相互作用产生转矩,从而实现电机的旋转。
但与传统直流电机不同的是,无刷直流电机在结构上取消了碳刷和换向器,采用电子换向技术,通过电子控制器对电机内部的绕组进行通电控制,从而实现电机的旋转。
无刷直流电机通常由定子、转子、电子控制器和位置传感器等部分组成。
定子由铁芯和绕组组成,负责产生磁场;转子则是由永磁体或电磁铁构成,负责在磁场中受力旋转。
电子控制器是无刷直流电机的核心部分,它根据位置传感器提供的转子位置信息,控制电机绕组的通电顺序和通电时间,从而实现电机的连续旋转。
位置传感器则负责检测转子的位置,为电子控制器提供反馈信号。
在无刷直流电机的工作过程中,当电机绕组通电时,会在定子中产生一个旋转磁场。
由于转子上的永磁体或电磁铁与定子磁场之间存在相互作用力,转子会在定子磁场的作用下开始旋转。
当转子旋转到一定位置时,位置传感器会向电子控制器发送信号,电子控制器根据接收到的信号控制电机绕组的通电顺序和通电时间,使定子磁场的方向发生变化,从而驱动转子继续旋转。
高精度无刷直流电机伺服控制系统设计与仿真

率管 的导通顺序 , 实现电机转速和转动方向的控制。
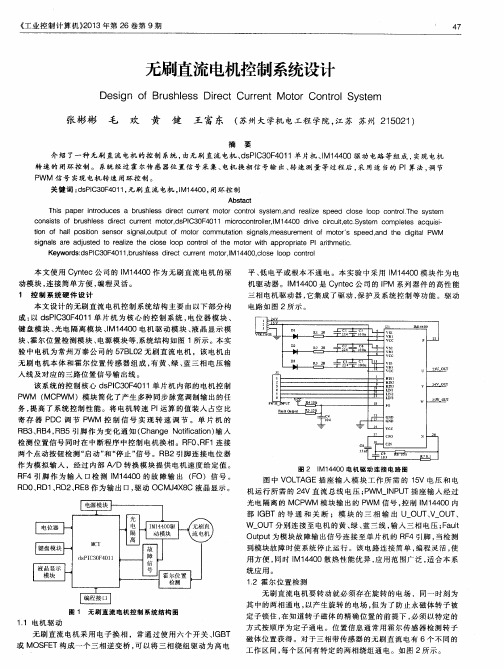
下 面重点介绍 系统 中的转 子位置检测 电路 、 电流检 相 测 电路 、 驱动电路 、 系统保护 电路等 。
T S 2 F 8 2是 由德 州 仪 器 公 司生 产 的 , 业 界 首 批 M 30 2 1 工
3 2位的控制专用 、 内含 闪存 以及高达 10 P 5 MIS的数 字信号 处理器 ,专 门为工业 自动化及 自动化控 制等应用而设计 。
s r o y tm c to r s l, hih s e v s se on r l e u t w c i bae o t t e —p a e nd o r o e Br h e s C m o o a s d n he hr e h s a f u p ls us l s D t r nd
每个 事件管理器模 块包括 : 2个 通 用 定 时 器 ( P G
本 系统实 现的关键 就是通过位置环 、 速度环和 电流环 三闭环结构最终实现位 置的伺服控制 。从 闭环结 构上看 ,
位 置 环 在 最 外 面 , 本 系 统 的 主 环 , 流 调 节 环 和 速 度 调 是 电
节环在 里面 , 两者都是为 位置环而 服务 , 电流调 节器 和速
B D M应用领域的推广 , LC 对系统 的动静态性能 、 鲁棒性 、 控
制精度等要求越来越 高。 本文 以三 相 四极无 刷直流 电动机为研究 对象 ,结 合 PD控制 和模糊控制各 自的优势 , I 设计 了一套基 于 T 公 司 I 的 C 00系列 T 3 0 2 1 S 20 MS2 F 8 2 P为核心 的全数字永磁 无 D
0 薯
统方案。本控制 系统的主要优势在于利用数字信号处理器的高速实时运算处理功能, 易于实现各种高效 0 _ 的控制算法 , 很好地解决 了伺服 系统 中 P WM 信号的生成、 电动机速度反馈和 电流反馈等问题。 并结合模 糊控制算法进行 了仿真研究, 达到无刷直流电机 的高精度伺服控制的 目的。
无刷直流电机PI控制系统的设计及分析

无刷直流电机PI控制系统的设计及分析杨林;刘曰涛;沈宝民;仲伟正【摘要】Traditional software controllers have such problems as slow running speed, low precision, poor immunity from interference, and high cost. A PI control system of BLDCM is presented based on complex programmable logic device to solve these problems. This system is composed of all hardware and adopts trapezoidal commutation control strategy. It has advantages of high response speed and strong immunity from interference. At the same time, the effect of different PWM modulation modes on armature current and electromagnetic torque of brushless current motor is analyzed, and the H-PWN—L-PWM modulation mode is selected to achieve the desired control effect. Finally, an experimental platform is built. The driver reaches stable state after 25.6 ms at the set speed of 2500 r/min. The results show that the system has good dynamic response performance.%针对传统软件控制方式运行速度慢、精度低、抗干扰能力差、成本高等问题,设计一种以复杂可编程逻辑器件(CPLD,complex programmable logic device)为核心的无刷直流电机PI控制系统.系统采用全硬件电路设计和梯形换向控制的策略,具有高响应速度和抗干扰能力.同时,分析不同脉冲宽度调制(PWM,pulse width modulation)方式对无刷直流电机续流回路和电磁转矩的影响,选取H-PWN—L-PWM的调制方式以达到理想的控制效果.最后搭建实验平台,控制系统在设定转速为2 500 r/min的情况下,经过25.6 ms到达稳定状态,结果表明该系统具有良好的动态响应性能.【期刊名称】《西安工程大学学报》【年(卷),期】2019(033)001【总页数】7页(P81-87)【关键词】无刷直流电机;可编程逻辑器件;PI控制系统;梯形换向控制;脉冲宽度调制【作者】杨林;刘曰涛;沈宝民;仲伟正【作者单位】山东理工大学机械工程学院, 山东淄博 255049;山东理工大学机械工程学院, 山东淄博 255049;山东理工大学机械工程学院, 山东淄博 255049;山东理工大学机械工程学院, 山东淄博 255049【正文语种】中文【中图分类】TM330 引言无刷直流电机具有质量轻、体积小、扭矩大、寿命长等优点,在工业控制、医疗器械、家用电器等领域有广阔的应用前景[1]。
基于自抗扰控制(ADRC)的无刷直流电机控制与仿真

一、研究意义1.研究意义由于无刷直流电机在四旋翼飞行器控制中的关键作用以及在生产实践中日益广泛的应用,设计快速且平稳的控制系统成为首要任务。
目前, 基于现代控制理论的高性能异步电机调速方法主要是依靠精确的数学模型加上传统的P ID控制。
PID控制实际应用效果较好,但又无法避免对负载变化的适应能力差、抗干扰能力弱和受系统参数变化影响等弱点,而且交流调速系统具有非线性、强耦合、多变量及纯滞后等特性, 很难用精确的数学模型描述, 这就使得基于精确数学模型的传统控制方法面临严重的挑战。
另外, 经典P ID控制需要根据运行工况的不同而调节控制器参数, 无刷直流电机又具有数学模型复杂,非线性等特点,这给现场调试增加了难度。
2.国内外研究状况及发展(1)无刷直流电机基本控制方法无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。
无刷电机是指无电刷和换向器(或集电环)的电机,又称无换向器电机。
直流无刷电动机的电机本身是机电能量转换部分,无刷电机的转子上装有永磁体,定子上是电枢,与有刷电机正好是相反的。
它除了电机电枢、永磁励磁两部分外,还带有传感器。
电机本身是直流无刷电机的核心,它不仅关系到性能指标、噪声振动、可靠性和使用寿命等,还涉及制造费用及产品成本。
由于采用永磁磁场,使直流无刷电机摆脱一般直流电机的传统设计和结构,满足各种应用市场的要求,并向着省铜节材、制造简便的方向发展。
直流无刷驱动器包括电源部及控制部,电源部提供三相电源给电机,控制部则依需求转换输入电源频率。
电源部可以直接以直流电输入(一般为24V)或以交流电输入(110V/220 V),如果输入是交流电就得先经转换器(converter)转成直流。
不论是直流电输入或交流电输入要转入电机线圈前须先将直流电压由换流器(inverter)转成3相电压来驱动电机。
换流器(inverter)一般由6个功率晶体管(V1~V6)分为上臂(V1、V3、V5)/下臂(V2、V4、V6)连接电机作为控制流经电机线圈的开关。
无刷直流电机控制系统的仿真与分析
c a l c u l a t i o n r e s u l t wa s a c c u r a t e , a n d t h e r e s u l t s we r e c o n s i s t e n t wi t h t h e t h e o r e t i c a l a n a l y s i s . Th e b u i l d i n g o f t h e s i mu l a —
Ab s t r a c t :Us i n g ma t h e ma t i c a l a n a l y s i s s o f t wa r e e f f e c t i v e l y i n t h e d e s i g n o f BI DC M c o n t r o l s y s t e m c a n a c c e l e r a t e t he d e — s i g n p r o c e s s . A BI DCM c o n t r o I s y s t e m wa s r e s e a r c h e d a n d a n a l y z e d u s i n g S a b e r s o f t wa r e . Th e p o s i t i o n d e t e c t i o n s e n s o r 。
t i o n s y s t e m p r o v i d e d a n e f f e c t i v e l y d e s i g n t o o l f o r BLDCM c o n t r o l s y s t e ms .
Ke y wo r d s :B I J) CM ;p o s i t i o n d e t e c t i o n s e n s o r ;e l e c t r o n i c c o mm u t a t o r s ;t h r e e — p h a s e i n v e r t e r c i r c u i t s
无刷直流电机的建模与仿真
无刷直流电机的建模与仿真摘要:该文在分析无刷直流电机(bldcm)数学模型和工作原理的基础上,利用matlab软件的simulink和psb模块,搭建无刷直流电机及整个控制系统的仿真模型。
该bldcm控制系统的构建采用双闭环控制方法,其中的电流环采用滞环电流跟踪pwm,速度环采用pi控制。
仿真和试验分析结果证明了本文所采用方法的有效性,同时也证明了验证其他电机控制算法合理性的适用性,为实际电机控制系统的设计和调试提供了新的思路。
关键词:bldcm控制系统;无刷直流电机;数学模型;matlab;电流滞环中图分类号: tp391 文献标识码:a 文章编号:1009-3044(2013)05-1172-03随着现代科技的不断发展,无刷直流电动机应用技术越发成熟,应用领域也越发广泛,用户对无刷直流电动机使用增多的同时,对其控制系统的设计要求也变得越来越高。
包括低廉的设计和搭建成本、短的开发周期、合适的控制算法、优良的控制性能等。
而科学合理的无刷直流电动机控制系统仿真模型的建立,对控制系统的直观分析、具体设计,快速检验控制算法,降低直流电机控制系统的设计成本,拥有十分重要的意义。
直流无刷电动机利用电子换向原理和高磁性材料,取代了传统的机械换相器和机械电刷,解决了有刷直流电动机换向器可维护性差和较差的可靠性的致命缺点,使得直流电动机的良好控制性能得到维持,直流电动机得到更好的应用。
伴随着如今功率集成电路技术和微电子技术的发展,控制领域相继出现了大量无刷直流电动机专用驱动和控制芯片,解决高性能无刷电动机驱动控制问题所提出的解决方案也变得更加丰富和科学,无刷直流电机在控制领域显示出前所未有的广阔应用前景[1]。
通过无刷直流电动机控制系统的仿真模型来检验各种控制算法,优化整个控制系统的方法,可以在短时间内得到能够达到预期效果的控制系统。
在对无刷直流电机电流滞环控制和数学模型等分析的基础之上,可以利用simulink中所提供的各种模块,构建出bldcm 控制系统的仿真模型,从而实现只利用simulink中的模块建立bldcm控制系统仿真模型。
无刷直流电机控制系统设计
s i g n a l s a r e a d j u s t e d t o r e a l i z e t h e c l o s e l o o p c o n t r o l f o t h e mo t o r w i t h a p p r o p r i a t e P I a r i t h m e t i c .
P WM 信 号 实现 电机 转 速 闭环 控 制 。 关键词 : d s P I C3 O F 4 0 1 1 , 无刷 直 流 电机 , I M1 4 4 0 0, 闭环 控 制
Ab s t ac t T hi s p ape r i n t r o duc e s a br u sh t es s di r ec t c ur r e n t mo t or c on t r o l s y s t em , a n d r ea l i l Th e s y s t em
co ns i s t s o f br u s hl es s di r ec t cu r r en t mo t o r , ds PI C3 0F 4 01 1 m i cr oc on t r o l l er , I M1 4 40 0 dr i v e ci r c ui t 。 et c S y s t e m c om p l e t e s a c qui s i 。 t i on o f h al l p os i t i on s e ns or si gn al , ou t pu t o f mot or c o mmu t a t i o n s i gn a l s , me a su r emen t o f mot or S s pee da nd t h e di gi t al P W M
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《工业控制计算机》2011年第24卷第9期本文主要采用TI 公司的TMS320LF2812DSP 芯片为控制器,设计了无刷直流电机的伺服控制系统,并利用Matlab7.1软件对这一系统进行仿真,以验证其控制效果。
1系统的硬件设计
系统的硬件框图如图1所示,可以看出硬件部分主要包括
主电路、驱动电路、DSP 控制电路与保护电路等组成。
图1系统硬件框图
主电路主要由交流三相电源、整流滤波和逆变桥组成。
输入交流电先经过整流滤波电路整流、稳压后变换为直流电,使用
IGBT 构成的逆变桥将直流电经过变换后用来驱动无刷直流电
机的运行。
功率驱动部分实现对控制部分传送过来的换向信息的处理和PWM 信号的隔离放大,控制功率管的导通和关断,以此来控制电机的转速。
控制部分以TMS320LF2812为控制核心,除了实现信号的采集、计算处理和控制算法的执行外,还要负责与上位机进行实时通讯及完成系统的其他各项控制功能。
A /D 模块对相电流信号进行转换和处理,作为电流环的反馈信号。
本系统中用光电编码器替代霍尔传感器,检测电机的转速及角位移,并反馈回
DSP 系统形成闭环控制。
电机旋转时,安装在电机轴上的光电
编码器的光栅盘与电机同速旋转,经光电检测装置检测输出的脉冲信号,通过计算每秒输出的脉冲个数就能反映出电动机的转速。
通过设置DSP 芯片中的定时器周期寄存器和比较寄存器来产生PWM 信号,调整PWM 信号的宽度就可以控制功率管的导通、关断时间,从而实现对电机的控制。
2系统的控制策略及软件设计2.1控制策略
控制系统采用双闭环控制策略,包括电流环和速度环,均采用PI 调节器,可以实现电机的准确可靠的运行。
如图2所示。
图2双闭环控制策略框图
电机正常运行时,控制器根据编码器测出的反馈位置信号计算出当前的转速,与设定的转速信号进行PI 计算,得到电流的给定电压参考值U ig ,电流反馈信号经A /D 接口送入DSP ,经转换后得到电流的反馈值U if 、U ig 和U if 进行PI 运算,得到电流调节器的输出调节占空比,控制功率管的开、关状态,从而实现对电机的转速和电流控制。
根据编码器的输出信号,可以计算得到电机的转速。
在给定的时间△t 内,电机转速的计算公式为:
n=60m /(N *△t )
其中m 是编码器码盘脉冲个数;N 是传感器每周产生的脉冲信号数。
电机在静止时的初始位置角为θ1,运行经过时间t 后,电机转子的位置角为:
无刷直流电机控制系统设计及仿真
王
巍
潘松峰(青岛大学自动化工程学院,山东青岛266071)
Brushless DC Motor Controller System Designed and Simulation
摘
要
设计了基于TI 公司的TMS320LF2812A DSP 的无刷直流电机控制系统,通过光电编码器准确检测转子位置信号,采用双闭环(速度环和电流环)控制策略,系统的控制算法采用遇限切除积分的PID 算法。
系统的软件设计包括两部分,分别是主程序和中断服务子程序。
经分析,该系统结构简单、易于实现、方便扩展。
经过Matlab7.1/Simulink6.3仿真验证,该系统可以可靠的运行。
关键词:无刷直流电机,光电编码器,PID 算法,仿真
Abstract
A brushless DC motor controller is designed based on TMS320LF2812A Digital Signal Processor (DSP)of TI.The position signals of rotor are detected exactly by Optical Encoder.The dual-closed-loop control strategy and the integral case PID lim-ited resection control algorithm are proposed in the system.System software design includes two parts:main program and in-terrupt service subroutines.The simulation result shows that the performance of this control system is stable and accurate.
Keywords :BLDCM,optical encoder,PID
algorithm,simulation
49
无刷直流电机控制系统设计及仿真
(上接第48页)
制算法,它具有结构清晰、算法简单、对模型适配适应能力强等优点,适用于纯时滞,开环渐近稳定的线性对象,是一种成功而有效的控制算法。
但DMC的输出动态特性受其参数的影响。
本文提出了一种对DMC的改进方法即DMC-PID,使PID参数整定方法与动态矩阵控制结合起来,用整定出的PID参数作为DMC-PID的加权系数,保证了良好的输出动态特性。
通过仿真取得了较好的效果。
参考文献
[1]俞金寿.工业过程先进控制[M].北京:中国石化出版社,2002:128-156
[2]KESSON BM,TO IVONEN HT.A neural network model predic-tive controller[J].Journal of Process Control,2006,16(9):65-69[3]王树青.先进控制技术及应用[M].北京:化学工业出版社,2002:24-89[4]杨乐平.LabVIEW高级程序设计[M].北京:清华大学出版社,2003:4-45
[5]王毓栋,琼春.基于DE算法的非线性预测控制及其应用[J].控制工程,2008,15(1):132-135[收稿日期:2011.6.10]
θ2=θ
1
/p+2πm/N
其中p为电机的极对数,从而实现了电机的转子位置信号的检测。
2.2软件设计
根据系统的控制策略,可以将整个控制系统的软件划分为两个部分,即主程序和中断服务子程序。
在主程序流程中主要完成DSP所需要用到的控制寄存器、I/O端口、中断设置的初始化,检测电机的初始位置,以及初始化软件中所用到的控制变量等。
在中断服务程序中,主要执行A/D转换模块、调节模块。
主程序和子程序流程图如图3所示。
图3a主程序流程图b子程序流程图
3系统的仿真及实现
为了验证控制系统的硬件及软件设计的合理性,本文在Matlab7.1/Simulink6.3环境下,建立了BLDC控制系统的仿真模型,并对模型进行了速度、电流双闭环控制系统的仿真。
其双闭环控制模块如图4所示。
图4闭环控制系统的仿真图
在仿真中,供电电源为220V直流电。
BLDC电机参数设置为:定子绕组R=0.75,定子绕组电感L=0.0085H,转子和负载的转动惯量J=0.001kg·m2,阻尼系数B=0.0005N·m·s,极对数p=3。
仿真时间设置为0.8s,给定转速为n=1500r/min。
仿真后的转速响应曲线波形如图5所示。
从仿真波形可以看出,在给定的参考转速n=1500r/min下,系统可以较快地达到稳定状态,符合系统的设计要求。
图5转速响应曲线图
4结束语
本文基于TMS320LF2812DSP设计了无刷直流电机控制系统,系统的结构简单、成本低,易于实现并且性能稳定,同时方便功能扩展。
同时在Matlab7.1环境下仿真验证了控制策略的合理性,为下一步进行深入的研究提供了一个很好的平台。
参考文献
[1]王晨阳,张玘,熊九龙.基于DSP的无刷直流电机控制系统的设计[J].微计算机信息,2008(19)
[2]夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009:182-190
[3]赵影,李唐娟.无刷直流电机的控制策略与仿真研究[J].电工技术,2010(3)
[4]苏奎峰,等.TMS320X281xDSP应用系统设计[M].北京:北京航空航天大学出版社,2008:339-344
[5]洪乃亮.电力电子、电机控制系统的建模和仿真[M].北京:北京机械工业出版社,2010:205-210
[6]韩学军,侯建勋,张根元.基于DSP的无刷直流电机速度控制系统[J].现代电子技术,2008(5)
[8]Pragasan Pillay,R Krishnan.Modeling of permanent magnet motor drives[J].IEEE Trans.On Industry Electronics,1988, 35(4):537-541
[收稿日期:2011.6.3
]!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!! 50。