贝叶斯框架下的单幅图像去雾算法
贝叶斯框架下的单幅图像去雾算法
贝叶斯框架下的单幅图像去雾算法1. Introduction1.1 Background1.2 Problem statement1.3 Objectives1.4 Contributions2. Literature review2.1 Image dehazing techniques2.2 Bayesian framework2.3 Related work3. Bayesian framework for single-image dehazing3.1 Model formulation3.2 Prior distributions3.3 Likelihood function3.4 Bayesian inference4. Experimental results4.1 Datasets and evaluation metrics4.2 Comparative analysis4.3 Subjective evaluation5. Conclusion and future work5.1 Summary of contributions5.2 Limitations and future directions5.3 ConclusionNote: the outline is provided by an AI language model, so the content may not be accurate or complete.第一章是引言,用于介绍文章的主题、研究问题、目标和意义,并阐述文章的贡献。
本论文的主题是贝叶斯框架下的单幅图像去雾算法。
在自然场景的图像中,雾气是不可避免的,而这些雾气对于图像的清晰度和色彩的准确性产生不良的影响,因此,去雾算法是图像处理的重要研究领域之一。
研究单幅图像去雾算法在贝叶斯框架下的应用,是一个具有挑战性和实际意义的课题。
这一章节首先介绍了贝叶斯框架在图像处理中的应用优势和意义。
图像去雾算法及其应用研究

摘要
有雾天气条件下获取的图像对比度低、图像内容模糊不清而且颜色整体偏 向灰白色,图像去雾的目的就是恢复有雾图像的对比度和真实色彩,重现在理 想天气条件下拍摄的清晰图像。鉴于图像处理和计算机视觉中有关图像理解、 目标识别、目标跟踪、智能导航等领域的很多算法都是假设输入的图像或视频 是在理想天气条件下拍摄的,因此有雾图像清晰化就显得格外重要,是目前人 们研究的热点问题之一,近年来在国际顶级期刊和会议上不断有新的算法被提 出来。 本文深入分析了有雾天气条件下图像成像的物理过程,回顾了有雾天气条 件下基于大气散射物理模型的图像退化模型和一些常规图像增强算法,多幅图 像去雾算法以及单幅图像去雾算法。在充分研究最近十几年有关图像去雾算法 的基础上,提出了在贝叶斯框架下利用稀疏先验来实现单幅图像去雾。 对于输入的一幅有雾图像,会存在一幅清新图像与之相对应,我们就是要 求清新图像在有雾图像已知情况下出现的概率最大,为此利用图像的统计模型 建立了贝叶斯框架。该框架下每个概率项都有其具体的含义。对于清晰自然图 像,其图像统计具有尖峰长尾特征,稀疏先验能够很好的刻画这种性质,图像 中的噪声可以认为是高斯白噪声,场景深度可以认为是局部平滑的。为了求解 该贝叶斯框架,我们利用 MAP(Maximum A Posteriori Probability),使用交 替优化方法和 IRLS(Iterative Reweighted Least Square)算法来求解优化问 题。 为了进一步说明本文算法的有效性,本文和最近在国际顶级会议上发表的 三种算法做了对比实验,并分析了各种方法的优点和不足之处。通过对比分析, 本文算法的有效性得到进一步证实。 关键词:图像去雾,图像复原,稀疏先验
色彩空间中的单幅图像自适应去雾算法

色彩空间中的单幅图像自适应去雾算法I. 引言介绍雾现象的影响和重要性,以及雾去除算法的研究现状和意义。
II. 相关工作对近年来雾去除算法进行综述和比较,包括传统的物理模型方法和基于深度学习的方法。
III. 色彩空间中的自适应去雾算法介绍本研究提出的基于色彩空间的自适应去雾算法,包括算法的整体流程、基本假设和总体思路,以及每个步骤的详细实现方法。
IV. 实验与分析使用许多真实和人工数据集进行算法评估,包括比较不同去雾算法的结果、分析算法性能和参数敏感性,以及演示算法结果的视觉效果。
V. 结论和未来工作总结本研究的主要贡献和特点,以及算法在实际应用中的局限性和改进方向,包括对数据集、算法参数、计算效率和可扩展性等方面的全面分析和讨论。
VI. 参考文献列举使用过的文献,包括相关论文、标准和数据集。
一、引言雾是常见的自然气象现象,它是由于水蒸气与气体和颗粒物质混合形成的一种可见浮游物,是给人们带来不便和危害的元凶之一。
在摄影、视频市场中,雾化图像会降低图片的质量和清晰度,给视觉感受带来不良的影响。
因此,研究雾去除算法具有广泛的现实意义和应用价值。
传统的雾去除算法主要采用物理模型,建立起相应的数学模型来描述雾化过程,通过估计雾化图像中的大气光、深度和反射等物理参数,来实现雾去除的效果。
但这类算法对于前景目标遮挡、薄雾或逆天大雾等问题的处理存在限制。
基于深度学习的雾去除算法的出现,极大地改变了传统方法的缺陷。
这类算法利用深度学习技术对图像内容和深度信息进行学习和分析,通过神经网络和大量样本的训练,来实现图像去雾与复原。
但是受限于样本的数量和种类,这类方法在特定场景下学习的效果往往不尽如人意。
近年来,色彩空间被广泛应用到各种图像处理技术中,包括图像增强、图像拼接、图像分割和目标检测等。
与传统颜色空间相比,色彩空间体现了人类视觉感知机制,增加了颜色对比度、提高了图像的信息量,能够更好地满足对图像色彩的需求。
色彩空间中的单幅图像自适应去雾算法是一种新的算法,它利用图像的色彩信息和本身的导向信息,采用自适应方式对雾化图像进行修改和改进,从而达到最佳的图像去雾效果。
图像去雾算法研究综述
图像去雾算法研究综述一、本文概述随着计算机视觉技术的快速发展,图像去雾技术已成为近年来的研究热点之一。
图像去雾旨在从有雾的图像中恢复出清晰、无雾的图像,从而提高图像的质量和视觉效果,为后续的图像处理和分析提供更为准确和可靠的信息。
本文旨在对图像去雾算法进行全面的研究综述,探讨各种去雾算法的原理、优缺点及适用场景,以期为后续的研究提供参考和借鉴。
本文将对图像去雾技术的研究背景和意义进行介绍,阐述图像去雾在各个领域中的应用价值。
接着,本文将从去雾算法的基本原理出发,详细介绍各种去雾算法的实现过程,包括基于物理模型的去雾算法、基于深度学习的去雾算法等。
在此基础上,本文将对各种去雾算法的性能进行评估,包括去雾效果、计算复杂度、实时性等方面的比较和分析。
本文还将对去雾算法的未来发展趋势进行展望,探讨去雾算法在新技术、新场景下的应用前景。
本文期望通过全面、系统的综述,为图像去雾技术的研究提供有益的参考和启示,推动图像去雾技术的进一步发展。
二、图像去雾技术基础理论图像去雾技术,作为计算机视觉和图像处理领域的一个重要研究方向,其基础理论涉及大气散射模型、图像增强与复原、深度学习等多个方面。
深入了解这些基础理论,对于设计和实现有效的去雾算法至关重要。
大气散射模型:大气散射模型是图像去雾算法的理论基础,其中最具代表性的是McCartney模型。
该模型描述了光线在大气中的传播和散射过程,将观察到的图像分解为直接衰减部分和大气光散射部分。
通过估算这两个部分,可以恢复出清晰的无雾图像。
图像增强与复原:图像增强和复原技术在去雾过程中发挥着重要作用。
图像增强技术,如对比度增强、色彩增强等,可以提高图像的视觉效果,使去雾后的图像更加清晰自然。
而图像复原技术则通过去除图像中的噪声和失真,恢复图像的原始信息,进一步提高去雾效果。
深度学习:近年来,深度学习在图像去雾领域取得了显著进展。
通过构建深度神经网络模型,可以学习到去雾过程的复杂映射关系,从而实现更加精确和高效的去雾。
图像去雾技术研究进展
图像去雾技术研究进展图像去雾技术研究进展一、引言雾霾天气给城市生活带来了很大的困扰,不仅降低了人们的生活质量,也给城市管理者带来了很大的挑战。
在此背景下,图像去雾技术的研究迅速发展,在改善图像质量的同时,也为我们认识雾霾天气提供了一种新的途径。
本文将详细介绍图像去雾技术的研究进展,包括基础算法、改进算法以及应用领域。
二、基础算法图像去雾的基础算法主要有两种,分别是单幅图像去雾算法和多幅图像去雾算法。
1. 单幅图像去雾算法单幅图像去雾算法是最早提出的一种算法,它通过从单幅图像中估计雾的传输矩阵来恢复清晰的图像。
最常见的算法是使用暗通道先验原理进行估计。
该算法假设在绝大多数的非雾像素区域中,至少存在一个颜色通道的像素值接近于0,通过计算每个像素点在颜色通道中的最小值,可以估计出雾的浓度和传输矩阵,从而实现图像去雾的效果。
2. 多幅图像去雾算法多幅图像去雾算法是在单幅算法的基础上发展起来的。
由于单幅图像去雾算法需要对雾的传输矩阵进行估计,这个过程中很难准确地估计雾的浓度和传输矩阵。
为了解决这个问题,研究者们提出了多幅图像去雾算法。
这种算法通过利用多幅具有不同对比度的图像,来进行雾的浓度和传输矩阵的估计,从而提高了去雾效果。
三、改进算法虽然基础算法在一定程度上可以去除雾霾的影响,但是仍然存在一些问题,如去雾结果中可能会出现颜色失真、细节丢失等情况。
为了进一步改善去雾效果,研究者们提出了一系列的改进算法。
1. 多尺度算法多尺度算法是一种常用的改进算法,它通过将图像分解为多个尺度的子图像,然后对每个子图像进行去雾处理,再将处理结果进行融合。
这种算法可以充分利用图像的局部特征,并且能够提高去雾结果的质量。
2. 深度学习算法深度学习算法是目前研究较为活跃的一种改进算法。
它通过构建深度神经网络模型,利用大量的真实雾霾图像训练模型,从而实现对雾霾图像的去雾。
深度学习算法不仅可以提高去除雾霾的效果,还可以减少人工干预,提高算法的自动化程度。
基于物理模型的单幅雾天图像去雾方法
基于物理模型的单幅雾天图像去雾方法
基于物理模型的单幅雾天图像去雾方法是指利用空间反射光谱特
性的物理模型来对单幅雾天图像进行去雾处理的方法。
它是基于亚像
元成像模型,它使用空间反射光谱特性来估计净反射比(AER),从而
还原雾天图像中的真实视觉效果。
首先,这种方法将图像从RGB分量
转换为和空间反射光谱相关的分量,例如,水明度和对散射成分的反
射率。
然后,根据亚像元成像模型,通过可见光中的不同频带和远红
外中的总体反射率,估计出每个亚像元的净反射比值,进而移除浓雾
的影响。
最后,这个去雾方法可以在一定程度上恢复图像的真实视觉
信息,并且可以有效地降低此类图像的噪音。
此外,该方法具有很多优势。
首先,它可以自动从其他光谱特性
恢复净反射比,因此它可以有效避免手工调整模型参数的问题。
其次,该方法不受时间限制,它可以在短时间内获得很好的去雾结果。
最后,该方法可以准确地检测到雾或低能见度对视觉效果的影响,并有效地
进行去雾。
总的来说,基于物理模型的单幅雾天图像去雾方法通过使用空间
反射光谱特性来估计每个亚像元的净反射比,从而移除浓雾的影响,
从而可以恢复图像的真实视觉信息,并有效地降低此类图像的噪音。
基于物理模型的快速单幅图像去雾方法

第37卷第2期自动化学报Vol.37,No.2 2011年2月ACTA AUTOMATICA SINICA February,2011基于物理模型的快速单幅图像去雾方法禹晶1李大鹏2廖庆敏1,3摘要在雾、霾等天气条件下,大气粒子的散射作用导致捕获的图像严重降质.本文提出一种新的基于物理模型的快速单幅图像去雾算法.该算法从大气散射模型出发,通过对大气光照进行白平衡,从而简化大气散射模型;利用快速双边滤波方法估计大气耗散函数,进而恢复场景反照率.本文算法的时间复杂度达到图像像素数的线性函数,具有很快的执行速度.实验结果表明本文算法有效地恢复了场景的对比度和颜色,从而明显地提高了图像的视见度.关键词图像去雾,视见度,大气散射模型,双边滤波,白平衡DOI10.3724/SP.J.1004.2011.00143Physics-based Fast Single Image Fog RemovalYU Jing1LI Da-Peng2LIAO Qing-Min1,3Abstract Imaging in the atmosphere is often degraded by scattering due to atmospheric particles such as haze,fog, and mist.In this paper,we propose a novel fast defogging method based on the atmospheric scattering model.The white balance is performed and the atmospheric scattering model is simplified prior to visibility restoration.In the inference process of the atmospheric veil,the coarser estimate is refined using a fast bilateralfiltering approach that preserves edges. Finally,the scene albedo is recovered by inverting this simplified model.The complexity of the proposed method is only a linear function of the number of input image pixels and this allows a very fast implementation.Results on a variety of outdoor foggy images demonstrate that the proposed method achieves good restoration for contrast and colorfidelity, resulting in a great improvement in image visibility.Key words Image defogging,visibility,atmospheric scattering model,bilateralfilter,white balance计算机视觉系统的很多户外应用,如城市交通、视频监控、智能车辆等,都要求图像特征的检测具备鲁棒性.然而,在雾、霾等天气条件下,大气中悬浮的大量微小水滴、气溶胶的散射作用导致捕获的图像严重降质,这极大地限制和影响了户外系统的功能.随着物体到成像设备的距离增大,大气粒子的散射作用对成像的影响逐渐增加.这种影响主要由两个散射过程造成:1)物体表面的反射光在到达成像设备的过程中,由于大气粒子的散射而发生衰减;2)自然光因大气粒子散射而进入成像设备参与成像.它们的共同作用造成捕获的图像对比度、饱和度降低,以及色调偏移,不仅影响图像的视觉效果,而且影响图像分析和理解的性能.在计算机视觉领域中,常用大气散射模型来描述雾、霾天气条件下场景的成像过程.近期几乎所有的去雾算法均建立在此模型之上,只是利用方式收稿日期2010-07-22录用日期2010-09-15Manuscript received July22,2010;accepted September15, 20101.清华大学电子工程系北京1000842.北京工业大学计算机学院北京1001243.清华大学深圳研究生院深圳5180551.Department of Electronic Engineering,Tsinghua University, Beijing1000842.College of Computer Science and Tech-nology,Beijing University of Technology,Beijing1001243. Graduate School at Shenzhen,Tsinghua University,Shenzhen 518055上有所不同.不同的方法采用不同的方式估计模型中的参数.依据所需要的成像系统或成像场景的附加信息,可将基于物理模型的方法分为4类.前两类方法利用同一场景的多幅输入图像,即不同天气条件下获取的多幅图像[1−5],或者不同偏振程度的多幅图像[6−9].然而,在实际应用中,通常都无法满足这样的特殊条件.后两类方法试图从单幅图像出发估计景深或景深相关项,进而恢复清晰的图像.受单幅图像信息量的限制,第3类方法利用场景的先验信息或用户交互估计景深.Oakley等[10−11]借助航拍相关参数来估计地形模型.但是,这种方法需要估计的参数过多.Narasimhan等[12]利用用户输入的信息对景深进行粗估计.为此,最近的研究工作[13−17]热衷于探索第4类方法,这类方法通过对图像数据做各种假设,从单幅图像中恢复场景信息.一般情况下,构造满足假设条件的代价函数和约束方程(组),使用最优化方法求解模型参数.基于数据假设的单幅图像去雾算法几乎均存在计算过程复杂、耗时的问题,难以应用到实际场合.本文提出了一种新的基于大气散射模型的快速去雾算法.该算法从大气散射模型出发,通过对大气光照进行白平衡(White balance),从而简化模型表示形式;利用快速双边滤波方法(Fast bilateralfiltering)144自动化学报37卷来估计大气耗散函数(Atmospheric veil),进而利用简化模型解出场景反照率(Scene albedo).本文算法的时间复杂度达到图像像素数的线性函数.此外,仅要求单幅输入图像,并且无需任何场景结构信息或用户交互.本文后续的内容安排如下:第1节描述大气散射模型,并回顾现有的基于数据假设的单幅图像去雾算法.第2节详细地描述本文提出的算法.第3节给出实验比较与分析.第4节为全文的结论.1背景Narasimhan等[4−5]给出雾、霾天气条件下单色大气散射模型(Monochrome atmospheric scat-tering model),即窄波段摄像机所拍摄的图像灰度值I(x)可表示为I(x)=Aρ(x)e−βd(x)+A1−e−βd(x)(1)式中,x为空间坐标,A表示天空亮度(Skylight),ρ为场景反照率,d为场景的景深,β为大气散射系数.如图1所示,大气散射模型由两项组成.第一项表示衰减模型(Attenuation model),也称为直接传播(Direct transmission)或直接衰减(Direct atten-uation).由于大气粒子的散射作用,一部分物体表面的反射光因散射而损失,未被散射的部分直接到达成像传感器,其光强随着传播距离的增大而呈指数衰减.第二项表示环境光模型(Airlight model).这是因为大气粒子对自然光的散射引起大气表现出光源的特性.环境光的强度随着传播距离的增大而逐渐增加.图1大气散射模型示意图Fig.1Atmospheric scattering modelNarasimhan等指出该模型的假设条件是单次散射、均匀大气介质,以及大气粒子对可见光的散射系数与波长无关.因此,该模型不适用于数千米之外场景成像的衰减补偿.基于物理模型的方法实质上是利用大气散射模型求解场景反照率.由于该物理模型包含3个未知参数,从本质上讲,这是一个病态反问题.最近提出的单幅图像去雾算法利用图像数据本身构造约束场景反照率或(和)景深的假设条件.Tan[13]假设局部区域的环境光为常数,以及对比度显著增强.在马尔可夫随机场(Markov ran-domfield,MRF)模型的框架下,构造关于边缘强度的代价函数,使用图分割(Graph cut)理论来估计最优光照.该算法旨在增强图像的对比度.尽管明显地改善了图像的视见度,然而,由于没有从物理模型上恢复真实场景反照率,恢复后的颜色显得过饱和,且在景深突变的交界区域产生严重的Halo效应.Fattal[14]假设图像局部区域的反照率为常向量(Constant albedo),以及物体表面色度(Surface shading)与介质传播(Medium transmission)具有局部统计不相关性.利用独立成分分析(Indepen-dent component analysis,ICA)来估计常向量反照率.该算法本质上是非线性反问题的求解,它的性能在很大程度上取决于输入数据的统计特性.独立成分变化不显著或颜色信息不足将导致统计估计不可靠.He等[15]假设在至少一个颜色通道的局部区域内,场景反照率趋于0,使用最小值滤波对介质传播函数进行粗估计.然后,借助图像抠图(Image matting)算法对介质传播函数进行细化(Refining).这种细化方法实质上是一个大规模稀疏线性方程组的求解问题,具有很高的时间复杂度和空间复杂度.需要指出的是,图像抠图引入α通道的目的是使前景与背景过渡区域的边缘柔化或反混叠(Anti-aliasing),而介质传播函数为场景辐射(Scene radiance)的指数衰减因子.因此,将图像抠图算法用于介质传播函数的细化并不合理.并且,在所用的代价函数中,数据项起着很小的作用.但若提高正则参数的取值,则景深突变边缘处的颜色易产生过冲失真(Overshoot distortion).Kratz等[16]假设场景反照率和景深是统计独立的,并可用正则概率先验对它们建模.场景反照率的梯度建模为幂函数重尾分布先验(Heavy-tail prior),而景深先验取决于特定场景,根据自然场景特征建模为δ分段常值函数或者高斯平滑函数.通过求解一个最大后验概率(Maximum a posteriori, MAP)估计问题,从而联合估计出场景反照率和景深.该算法需根据特定图像选取景深先验模型,且根据经验给定先验模型中的参数.Tarel等[17]假设大气耗散函数在可行域中逼近最大值,且局部变化平缓,提出了一种快速图像去雾算法.该算法利用中值滤波的变形形式估计大气耗散函数.但是,中值滤波并非好的边缘保持滤波器,不恰当的参数设置易引入Halo效应.此外,该算法参数较多,不易调整.2期禹晶等:基于物理模型的快速单幅图像去雾方法1452本文的算法本文在快速双边滤波方法的基础上,提出了一种快速单幅图像去雾算法.本文的算法可分为3个步骤:1)估计天空亮度,并对大气光照进行白平衡,从而简化大气散射模型;2)利用快速双边滤波估计大气耗散函数;3)求解简化的大气散射模型,恢复场景反照率.2.1大气散射模型的简化2.1.1天空亮度的估计直接用最亮像素值估计天空亮度A [8]易受到高亮噪声或白色物体的影响.文献[15]先分别对各颜色分量进行灰度腐蚀操作,再取颜色分量之间的最小值,从中选取0.1%最亮的像素,用对应原图像中的最大像素值估计天空亮度A .为了滤除图像中白色物体对估计天空亮度的影响,结构元素的尺寸应大于图像中白色物体的尺寸.但是,若图像中的天空区域也小于结构元素的尺寸,则将错误地滤除天空区域.如图7所示的后两幅自然场景图像,仅可从树枝之间看到天空,图像中天空区域的面积较小,因此,较大的尺寸容易将天空区域完全腐蚀.显而易见,天空区域具有3个特性:1)亮度较高;2)灰度平坦;3)位置偏上.本文将满足以上3个特性的像素集合确定为天空区域.首先,对彩色图像的最小颜色分量进行最小值滤波,也称为灰度腐蚀操作,可表示为I min (x )=miny ∈Ω(x )minc ∈{R,G,B }I (y )(2)式中,c ∈{R,G,B }分别表示R 、G 、B 颜色通道;Ω(x )表示以像素x 为中心的邻域,其尺寸自适应地与图像宽和高中的最小值成比例,本文中取0.025.然后,采用Canny 算子对彩色图像的灰度分量进行边缘检测,对边缘图像进行分块统计,计算各图像块中边缘像素数所占的比例,记为N edge (x ).同时满足I min (x )>T v 且N edge (x )<T p 的像素集合指定为候选天空区域.本文设定亮度阈值T v 为I min (x )中最大值的95%,平坦阈值T p 为0.001.图2(a)为一幅雾天拍摄的图像,在图2(b)中候选天空区域用青色标识.最后,对候选天空区域标记连通分量.利用天空区域位置的先验信息,选取图像上方的一个连通分量作为天空区域.在原图像的对应区域中,将最大像素值确定为天空亮度A 的估计值.(a)原图像(a)Input image(b)候选天空区域(黑色区域)(b)Candidate for sky region(black area)图2候选天空区域图示Fig.2Candidates for sky region2.1.2白平衡为了简化式(1)的描述,用介质传播函数t (x )表示指数衰减项e −βd (x ),即t (x )=e −βd (x )(3)式中,0<t (x )<1.大气耗散函数定义为V (x )=1−t (x )(4)显然,0<V (x )<1.大气耗散函数表示环境光对场景成像的附加部分,它是关于景深d (x )的增函数.WP (White point)算法,也称为Max-RGB 算法,利用R 、G 、B 颜色分量的最大值来估计光照的颜色[18].本文用已估计的天空亮度A 替换最大值,从而对大气光照进行白平衡,即将大气光照的颜色校正到灰度轴方向上.修改WP 算法的白平衡处理正好是对图像除以天空亮度A .为此,对式(1)两端除以A ,并将式(3)和式(4)代入式(1),大气散射模型可改写为I (x )A=ρ(x )t (x )+V (x )(5)对于图像中亮度高于天空亮度的区域,则对应I (x )/A >1.为了下一节估计大气耗散函数的目的,将白平衡校正的图像I (x )/A 限制在[0,1]范围内,用I (x )表示为I (x )=min I (x )A ,1 (6)进而,大气散射模型可简化为I (x )=ρ(x )t (x )+V (x )(7)在I (x )中,天空亮度A 校正为白色(1,1,1)T.146自动化学报37卷2.2大气耗散函数的估计2.2.1粗估计由于雾、霾的存在,随着场景到成像设备的距离增大,环境光对成像的作用逐渐增加.从视觉效果来看,图像中雾的浓度逐渐增强,图像的亮度逐渐增大.因此,图像亮度是场景景深的依据.根据式(7)表示的物理模型可知,大气耗散函数V (x )受两个条件的约束:1)V (x )≥0,即V (x )为正值;2)V (x )≤I (x ),即V (x )不大于I (x )的最小颜色分量.本文假设恢复后的对比度被尽可能地提高,且非景深突变的边缘处,景深平缓变化[17],通过由粗到细的两步估计大气耗散函数.第1步,用I (x )的最小颜色分量对大气耗散函数进行粗估计,即˜V (x )=min c ∈{R,G,B }I (x )(8)这基本上与文献[15]的观点保持一致,即在雾、霾天气条件下零反照率(全吸收)颜色波段成像的灰度值主要是环境光的贡献.图4(a)为图2(a)中大气耗散函数的粗估计结果.2.2.2基于快速双边滤波的细化操作由于大气耗散函数仅是关于景深d (x )的函数,而与反照率ρ(x )无关.第2步,对大气耗散函数的粗估计˜V(x )进行区域平滑操作,保持景深突变的边缘细节,这可以看作一个滤波问题.He 等[15]估计介质传播函数的第1步实际上等效于对˜V(x )进行最小值滤波,但是,单一的最小值滤波会产生Halo 效应和块效应.第2步借助图像抠图算法对介质传播函数进行细化操作.Tarel 等[17]本质上是对˜V(x )进行中值滤波来估计大气耗散函数.这两种方法的问题见第1节中的描述.为此,本文提出利用快速双边滤波方法来估计大气耗散函数V (x ).Tomasi 等[19]于1998年提出了双边滤波的理论.双边滤波是一种边缘保持的非迭代平滑滤波方法.它的权重由空域(Spatial domain)S 和值域(Range domain)R 平滑函数的乘积给出.随着与中心像素的距离以及灰度差值的增大,邻域像素的权重逐渐减小.本文使用高斯型双边滤波,即空域和值域平滑函数均是高斯函数.对于大气耗散函数的粗估计˜V (x ),利用高斯型双边滤波进行细化操作,可表示为V (x )=1W b y ∈SG σs ( x −y )G σr ˜V (x )−˜V (y ) ˜V (y )(9)其中,W b 为归一化系数W b=y ∈SG σs ( x −y )G σr˜V (x )−˜V (y )(10)式中,G σs 和G σr 为高斯函数,σs 为空域高斯模板的尺寸,σr 为值域高斯函数的尺度.如图3所示,图3(a)为图2(a)中图像块(白色方框)的三维网格图,图3(b)和图3(c)分别为中心像素的空域滤波器G σs 的权重和双边滤波器G σs ×G σr 的权重.对于与中心像素距离相近且灰度差值较小的像素,双边滤波赋予较大的权重;而对于距离相近但灰度差值较大的像素,赋予较小的权重.因此,双边滤波可以很好地保持图像边缘,从而有效地抑制了恢复结果中由于景深突变而在边缘处引入的Halo 效应.(a)图2(a)中白色方框标出的图像块(a)Three-dimensional plot of the small-squared patch in Fig.2(a)(b)中心像素的空域滤波器权重(b)Spatial filter for the central pixel(c)中心像素的双边滤波器权重(c)Bilateral filter for the central pixel图3双边滤波示意图Fig.3Bilateral filtering2期禹晶等:基于物理模型的快速单幅图像去雾方法147由于双边滤波是一种非线性滤波,空域卷积的快速算法已不再适用.根据式(9)直接计算双边滤波的时间开销很大.因此,最近提出了快速双边滤波算法[20−21],探索双边滤波的近似算法,它们在速度上有很大的提高,而在精度上仅有微小的下降.Paris等[21]在信号处理理论的基础上,提出了一种快速近似计算,并分析了数值逼近精度.该算法将双边滤波表示为三维乘积空间S×R中线性移不变卷积,在降采样的高维空间执行低通滤波,最后线性插值到初始分辨率,获得最终的双边滤波结果.本文利用文献[21]的快速双边滤波算法估计大气耗散函数V(x).进一步,根据式(4)计算介质传播函数t(x)为t(x)=1−V(x)(11)图4(b)显示了图2(a)的介质传播函数.(a)大气耗散函数的粗估计(a)Coarser atmospheric veil(b)介质传播函数(b)Medium transmission图4大气耗散函数的粗估计与介质传播函数图示Fig.4Coarser atmospheric veil and correspondingmedium transmission2.3场景反照率的恢复利用已估计的大气耗散函数V(x)和介质传播函数t(x),依据式(7)来解出场景反照率ρ(x).由式(8)可知,图像I (x)与大气耗散函数V(x)的差值极可能接近0.与此同时,天空位于无穷远处,其介质传播函数t(x)趋于0.在这种情形下,直接恢复场景反照率将导致天空区域的颜色发生严重失真.为了避免0/0型(或者非常小的两数相除)的不确定值,本文引入因子κ(0<κ<1),场景反照率ρ(x)由下式计算:ρ(x)=I (x)−κV(x)t(x)(12)式中,κ的引入强制恢复结果中的天空区域为白色.由于平坦的天空区域因图像压缩、镜头光学结构、传感器性能、彩色插值算法等诸多降质因素而产生伪轮廓.因此,为了达到最优的显示效果,图像中天空区域所占的比例越大,κ的取值应越小.在本文中,κ简单地取值为0.95.最后,截断[0,1]范围以外的值,而无需文献[17]中动态范围压缩或文献[15]中曝光量(Expo-sure)增加等后处理过程.3实验比较与分析3.1算法复杂度分析设一幅图像的尺寸为s x×s y,在文献[21]中,快速双边滤波算法的时间复杂度可达到O(s x s y),而本文中其他步骤均为简单操作.因此,本文算法的时间复杂度也为O(s x s y).可见,这仅是图像像素数的线性函数,因而具有很高的执行效率.Tarel算法的Matlab代码参见网站http://pe rso.lcpc.fr/tarel.jean-philippe/publis/iccv09.html,其时间复杂度为O(s x s y s2vln s v),其中,s v为中值滤波的模板尺寸.在Tarel算法中,中值滤波的模板尺寸一般取值较大,如图5中下图为原文中的图例, s v的取值为61.3.2实验结果为了验证所提出算法的性能,本文将与Tarel算法进行比较,并给出在更多户外场景的雾霾图像上的复原结果.如图5所示,(a)列为原图像,(b)列为Tarel算法的结果,参数为p=0.95,s v=61,(c)列为本文算法的结果.从图5中可以看出,Tarel算法处理的图像颜色显得过饱和(注意图5中的草地和天空区域),且在景深突变的边界易产生Halo效应(注意图5中树木和天空区域的交界处).本文的算法更好地再现了场景的真实颜色,且有效地降低了Halo效应.本文的算法应用于大量户外场景的雾霾图像上取得了较好的去雾效果.图6和图7分别给出了部分城市场景和自然场景的实验结果.(a)列为原图像,(b)列为介质传播函数,(c)列为最终恢复的场景反照率.从图6和图7中可以看出,本文的算法有效地去除了图像中雾霾的作用,再现了场景的对比度和颜色,从而在很大程度上提高了图像的视见度. 4结论本文提出了一种新的基于双边滤波方法的大气耗散函数估计方案.本文的算法从单幅图像出发,自动地恢复场景反照率,无需任何场景的附加信息.通过分析得出本文算法的时间复杂度仅是图像像素数的线性函数,处理速度快.最后,在大量雾霾图像上的实验结果验证了本文算法的有效性.与现有的大多数算法存在的共同问题是,本文的算法对白色物体的恢复效果不太理想.148自动化学报37卷图5本文算法与Tarel 算法的实验结果比较((a)原图像;(b)Tarel 算法的结果;(c)本文算法的结果)Fig.5Comparison with Tarel s work ((a)Input images;(b)Tarel s results;(c)Ourresults)图6城市场景去雾结果((a)原图像;(b)介质传播函数;(c)场景反照率)Fig.6Fog removal results in urban scenes ((a)Inputimages;(b)Transmission maps;(c)Unveiledimages)图7自然场景去雾结果((a)原图像;(b)介质传播函数;(c)场景反照率)Fig.7Fog removal results in natural scenes ((a)Inputimages;(b)Transmission maps;(c)Unveiled images)致谢感谢Tarel 和Hauti 提供了所提出算法的Mat-lab 源代码.References1Nayar S K,Narasimhan S G.Vision in bad weather.In:Proceedings of the 7th IEEE International Conference on Computer Vision.Kerkyra,Greece:IEEE,1999.820−8272Narasimhan S G,Nayar S K.Chromatic framework for vi-sion in bad weather.In:Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Washington D.C.,USA:IEEE,2000.598−6053Narasimhan S G,Nayar S K.Vision and the atmosphere.International Journal of Computer Vision ,2002,48(3):233−2544Narasimhan S G,Nayar S K.Removing weather effects from monochrome images.In:Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recog-nition.Washington D.C.,USA:IEEE,2001.186−1935Narasimhan S G,Nayar S K.Contrast restoration of weather degraded images.IEEE Transactions on Pattern Analysis and Machine Intelligence ,2003,25(6):713−7246Schechner Y Y,Narasimhan S G,Nayar S K.Instant de-hazing of images using polarization.In:Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Washington D.C.,USA:IEEE,2001.325−3327Schechner Y Y,Narasimhan S G,Nayar S K.Polarization-based vision through haze.Applied Optics ,2003,42(3):511−5258Namer E,Schechner Y Y.Advanced visibility improvement based on polarization filtered images.In:Proceedings of the Polarization Science and Remote Sensing II.San Diego,USA:SPIE,2005.36−459Shwartz S,Namer E,Schechner Y Y.Blind haze separation.In:Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Washington D.C.,USA:IEEE,2006.1984−199110Oakley J P,Satherley B L.Improving image quality inpoor visibility conditions using a physical model for con-trast degradation.IEEE Transactions on Image Processing ,1998,7(2):167−17911Tan K,Oakley P J.Physics-based approach to color imageenhancement in poor visibility conditions.Optical Society of America ,2001,18(10):2460−246712Narasimhan S G,Nayar S K.Interactive (de)weatheringof an image using physical models.In:Proceedings of the ICCV Workshop on Color and Photometric Methods in Computer Vision.Nice,France:IEEE,2003.1387−139413Tan R T.Visibility in bad weather from a single image.In:Proceedings of the IEEE Conference on Computer Vi-sion and Pattern Recognition.Anchorgae,USA:IEEE,2008.1−82期禹晶等:基于物理模型的快速单幅图像去雾方法14914Fattal R.Single image dehazing.ACM Transactions on Graphics,2008,27(3):1−915He K M,Sun J,Tang X O.Single image haze removal using dark channel prior.In:Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition A: IEEE,2009.1956−196316Kratz L,Nishino K.Factorizing scene albedo and depth from a single foggy image.In:Proceedings of the IEEE In-ternational Conference on Computer Vision.Kyoto,Japan: IEEE,2009.1701−170817Tarel J P,Hautiere N.Fast visibility restoration from a sin-gle color or gray level image.In:Proceedings of the12th IEEE International Conference on Computer Vision Kyoto.Japan:IEEE,2009.2201−220818Cardei V,Funt B,Barnard K.White point estimation for uncalibrated images.In:In:Proceedings of the7th IS and T/SID Color Imaging Conference:Color Science,Systems and Applications.Scottsdale,USA:Society for Imaging Sci-ence and Technology,1999.97−10019Tomasi C,Manduchi R.Bilateralfiltering for gray and color images.In:Proceedings of the6th International Conference on Computer Vision Bombay.India:IEEE,1998.839−84620Yang Q X,Tan K H,Ahuja N.Real-time O(1)bilateral filtering.In:Proceedings of the IEEE Conference on Com-puter Vision and Pattern Recognition.Miami,USA:IEEE, 2009.557−56421Paris S,Durand F.A fast approximation of the bilateralfil-ter using a signal processing approach.International Journal of Computer Vision,2009,81(1):24−52禹晶清华大学电子工程系博士研究生.主要研究方向为模式识别与图像处理.本文通信作者.E-mail:j-yu08@(YU Jing Ph.D.candidate in theDepartment of Electronic Engineering,Tsinghua University.Her research in-terest covers pattern recognition and image processing.Corresponding author of this paper.)李大鹏北京工业大学计算机学院硕士研究生.主要研究方向为模式识别与图像处理.E-mail:lidapeng@(LI Da-Peng Master student at theCollege of Computer Science and Tech-nology,Beijing University of Technol-ogy.His research interest covers pat-tern recognition and image processing.)廖庆敏清华大学教授.1994年获得法国Rennes大学信号处理与通信博士学位.主要研究方向为图像和视频处理与分析、计算机视觉及其应用.E-mail:liaoqm@(LIAO Qing-Min Professor at Ts-inghua University.He received hisPh.D.degree in signal processing and telecommunications from University of Rennes,France,in 1994.His research interest covers image/video analysis, computer vision and its applications.)。
几种去雾算法介绍
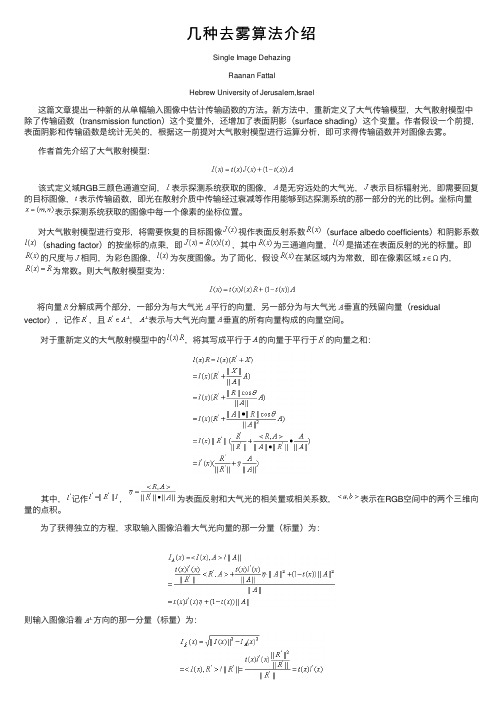
⼏种去雾算法介绍Single Image DehazingRaanan FattalHebrew University of Jerusalem,Israel这篇⽂章提出⼀种新的从单幅输⼊图像中估计传输函数的⽅法。
新⽅法中,重新定义了⼤⽓传输模型,⼤⽓散射模型中除了传输函数(transmission function)这个变量外,还增加了表⾯阴影(surface shading)这个变量。
作者假设⼀个前提,表⾯阴影和传输函数是统计⽆关的,根据这⼀前提对⼤⽓散射模型进⾏运算分析,即可求得传输函数并对图像去雾。
作者⾸先介绍了⼤⽓散射模型:该式定义域RGB三颜⾊通道空间,表⽰探测系统获取的图像,是⽆穷远处的⼤⽓光,表⽰⽬标辐射光,即需要回复的⽬标图像,表⽰传输函数,即光在散射介质中传输经过衰减等作⽤能够到达探测系统的那⼀部分的光的⽐例。
坐标向量表⽰探测系统获取的图像中每⼀个像素的坐标位置。
对⼤⽓散射模型进⾏变形,将需要恢复的⽬标图像视作表⾯反射系数(surface albedo coefficients)和阴影系数(shading factor)的按坐标的点乘,即,其中为三通道向量,是描述在表⾯反射的光的标量。
即的尺度与相同,为彩⾊图像,为灰度图像。
为了简化,假设在某区域内为常数,即在像素区域内,为常数。
则⼤⽓散射模型变为:将向量分解成两个部分,⼀部分为与⼤⽓光平⾏的向量,另⼀部分为与⼤⽓光垂直的残留向量(residualvector),记作,且,表⽰与⼤⽓光向量垂直的所有向量构成的向量空间。
对于重新定义的⼤⽓散射模型中的,将其写成平⾏于的向量于平⾏于的向量之和:其中,记作,为表⾯反射和⼤⽓光的相关量或相关系数,表⽰在RGB空间中的两个三维向量的点积。
为了获得独⽴的⽅程,求取输⼊图像沿着⼤⽓光向量的那⼀分量(标量)为:则输⼊图像沿着⽅向的那⼀分量(标量)为:(因为向量和向量垂直,所以)。
则有:由上式解得传输函数为:若已知⽆穷远出的⼤⽓光,则与均可求,唯⼀未知量为,所以求解的问题就归结为求解内的问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第22卷第10期2010年10月计算机辅助设计与图形学学报Journal o f Computer A ided Desig n &Co mputer Gr aphicsV ol.22N o.10Oct.2010收稿日期:2009-11-10;修回日期:2010-04-15.基金项目:中国博士后科学基金资助项目.王多超(1982 ),男,硕士,主要研究方向为数字图像处理;王永国(1965 ),男,学士,副教授,硕士生导师,论文通讯作者,主要研究方向为数值计算、图像处理、数据库应用(ygw ang21@);董雪梅(1979 ),女,博士,主要研究方向为小波分析、机器学习及统计分析;胡晰远(1984 ),男,博士研究生,主要研究方向为图像与信号处理、图像配准;彭思龙(1971 ),男,博士,研究员,博士生导师,主要研究方向为小波理论及应用、模式识别、图像处理等.贝叶斯框架下的单幅图像去雾算法王多超1),王永国1)*,董雪梅2),胡晰远2),彭思龙2)1)(安徽大学数学科学学院 合肥 230039)2)(中国科学院自动化研究所国家专用集成电路设计工程技术研究中心 北京 100190)(splade2009@)摘要:在有雾天气条件下拍摄的图像,由于光线在传播过程中受到空气中悬浮颗粒的散射,导致图像内容模糊不清,颜色偏灰白色.为了恢复出清晰的图像,根据大气散射物理模型,利用图像的稀疏先验知识,在贝叶斯框架下提出一种单幅图像去雾算法.该算法用图像梯度稀疏性先验来约束优化结果,并认为图像成像噪声服从零均值的高斯分布,然后用IRL S 方法对其求解.实验结果表明,该算法能够很好地恢复图像的对比度和保持图像的真实颜色,噪声小,便于应用.关键词:去雾;贝叶斯框架;稀疏先验;大气散射模型中图法分类号:T P391.41Single Image Dehazing Based on Bayesian FrameworkWang Duo chao 1),Wang Yongg uo 1)*,Dong Xuem ei 2),H u Xiy uan 2),and Peng Silo ng 2)1)(S chool of M athematica l S cie nces ,A nhui Univ er sity ,H e f ei 230039)2)(National A S IC Design Eng ineering Ce nter ,I nstitu te o f A utomation ,Chine se Ac ade my o f S cience s,Beij ing 100190)Abstract :Because o f light scattered by the suspended particles in the atm osphere,pho to graphs taken in the fo gg y day lo ok g ray and are lack of visibility.In order to unv eil the clear imag e s structures and colors,w e pr opo se a new algor ithm based o n the atm osphere scattering m odel using a single imag e and the image sparsity prior in Bayesian framewo rk.The fog remov al r esult is optimized under the constraint of the prior of the image gr adient sparsity and the noise in the fogg y imag e being the normal distributio n w ith zero mean,and then the o ptimization functio n is com puted using the IRLS alg orithm.In our ex periments,the alg orithm has a g ood effect on resto ring the clear image s co ntents and preserving the image s true co lors.T he no ise in the output im age is very w eak that has advantag e for many applicatio ns.Key words :dehazing;Bay esian framew ork;spar sity prior;atmosphere scattering m odel 对户外场景进行普通光学成像时经常会受到有雾天气的影响.在有雾天气条件下,从物体表面反射的光线到达成像设备之前,会受到大气中悬浮颗粒的影响发生散射,散射的程度和悬浮颗粒的种类、大小、形状及其在大气中的聚集程度,即雾的浓度以及光的波长有关[1].当雾较浓时,成像设备所得到的图像的对比度较低,颜色偏向灰白色,导致图像中的物体辨认不清,直接影响到大多数基于计算机视觉算法的自动化图像系统的正常工作,如交通运输、户外监视、地形侦测系统等.因此,图像去雾算法的研究有着现实和理论的迫切需要.在已有的文献中,人们提出了多种去雾方法.一种方法是利用相机附带的偏振光滤波器,以及同一场景点在不同偏振光条件下获得的图像,实现多幅图像去雾[2];该方法的缺点是对动态场景处理效果不好.另一种方法是利用同一场景在不同雾强度下进行拍摄所得的多幅图像来去雾[1],该方法由于需要等到天气条件的改变才能拍摄多幅图像,有很强的时间限制,同样不能很好地处理运动场景.还有学者利用单幅图像和附加的场景深度或者场景结构信息来实现去雾.文献[3]提出了基于图像的退化模型,在用户有限的交互操作下,实现了单幅图像的去雾算法;但是该算法需要的附加信息往往不太容易获得.近年来,基于单幅图像来实现图像去雾已逐渐成为图像处理与计算机视觉领域的研究热点.Fattal[4]运用独立成分分析的方法,基于图像表面阴影和大气传递函数在图像局部块上统计不相关的假设,利用雾天图像退化模型,在马尔可夫随机场(M arkov random field,M RF)框架的约束下实现了单幅图像的去雾.该方法去雾效果显著,但对于图像各个分量变化不大的情况处理效果不好.几乎在同一时期, T an[5]基于无雾图像的对比度比有雾图像的对比度要高的事实,通过最大化局部对比度,并基于M RF 框架对结果进行规整化,也实现了单幅图像的去雾.该方法极大地增强了图像的对比度,但是容易导致图像的颜色失真,并且在场景深度不连续的地方会产生光圈效应.H e等[6]从新的角度提出户外自然图像的先验知识,通过对大量户外自然图像的统计实验得出,在户外无雾图像中,绝大多数图像块中都有一些在某个色彩通道亮度值很小的像素.基于该实验结论,H e等[6]提出了暗通道先验模型,通过暗通道假设直接恢复出无雾图像.该方法对那些符合暗通道假设的图像效果非常显著,而对那些有大片白色区域的图像处理的效果会失真. 本文在前人工作的基础上,根据图像的稀疏先验,基于贝叶斯框架建立了图像去雾的优化模型,实现了单幅图像的去雾.该方法处理的效果比较显著,不仅能恢复图像的对比度,而且能保持图像的真实色彩,同时生成的图像噪声较文献[6]要小,便于后续的高层次图像处理算法的应用.1 雾天图像退化模型空气中除了氮气、氧气、水蒸气等成分之外,还有一部分是悬浮在空气中的颗粒,如粉尘、燃烧产生的烟雾、火山灰等,这些分散在大气中的小颗粒对空气湿度变化很敏感.随着空气湿度的增大,这些颗粒的表面会包裹着一层水汽,形成小水滴.这些小水滴的形状、大小、在空气中的聚集程度等因素决定了不同的天气条件,形成阴霾、薄雾、雾等多种天气状况[1].有雾天气对光线在大气中的传播有着很大的影响,大体上可以分为散射、吸收和发射3类,其中光的散射起到主要的作用.根据M cCartney提出的大气散射模型可知,起主要作用的是衰减模型和环境光模型[1,4 6].1.1 衰减模型由于大气中悬浮颗粒的散射作用,从场景表面反射的光线在到达相机的过程中部分光线偏离原来的传播方向,使得到达观测者的入射光的光照强度变弱,如图1所示.图1 大气衰减模型 入射光的衰减可以用模型E d(d, )=E0(x)e- ( )d(x)d(x)2来描述[1,4 6].其中,E d(d, )表示观测者接收到的场景点光照强度;E0(x)表示场景点光照强度;d(x)表示场景点到观测者之间的距离; 表示光波长; ( )称为大气散射系数.由于雾是均匀同质物质,并且空气中悬浮的颗粒的半径比较小,可以认为其对各个波长散射能力是相同的,即 ( )是一个与 无关的常量[4,6].衰减模型描述了随着场景成像距离的增加,到达观测者的光照强度呈指数减少这样一个事实.1.2 环境光模型如图2所示,直射的阳光、天空漫射的光线、地面1757第10期王多超,等:贝叶斯框架下的单幅图像去雾算法反射的光线等构成环境光.环境光经过大气中悬浮颗粒的散射后,有部分到达观察者.这一过程可以表述[1,4 6]为L (x )=L ( , )(1-e - ( )d(x)).其中,L ( , )是沿着观测者的视线方向无穷远处的环境光的强度[1];L (x )是由于散射作用,大气光中进入观测者的那部分光照强度;x 表示场景点的位置;其他参数意义同上.环境光模型描述了随着成像距离的增加,到达观察者的环境光线的增多.这导致了图像颜色的漂移,使得有雾图像看起来整体上偏灰白.图2 大气光模型1.3 图像退化模型有雾天气条件下图像的退化模型主要包含光线的衰减模型和大气光模型2个部分,它们的共同作用导致了图像质量的退化.所以在有雾天气条件下,图像的退化模型在RGB 颜色空间中可以表述[1,4 6]为I (x )=E 0(x )e - d (x)d(x )2+L (1-e- d (x))=J (x )t(x )+(1-t(x ))A(1)其中,I (x )是观测到的有雾图像在x 位置处的颜色值;J (x )=E 0(x )d(x )是清晰无雾图像在x 位置处的颜色值;称t(x )=e - d (x)为传递系数,它是一个标量,反映光线穿透雾的能力,其值越大,表明从场景表面反射的光线穿透雾到达观察者的数量就越多.t(x )=1,表明从场景表面反射的光线全部到达观察者,没有发生散射;t(x )=0,表明从场景表面反射的光线被完全散射出去了.本文中约束t(x )的取值范围是[0,1].A 是一个常向量,表示在沿着观测者视线方向无穷远处的光照强度.在一个图像小区域中,假设t(x )=t <1是一个常量,则有[4 6]!x∀I (x )∀=!x∀tJ (x )+(1-t) A ∀=t!x∀J (x )∀<!x∀ J (x )∀,表明退化模型可以很好地解释有雾天气下所拍摄的图像的对比度的降低.2 图像去雾的贝叶斯框架H e 等[6]根据户外自然图像的统计特点,提出了暗通道的先验,取得了很好的去雾效果.本文在他们工作的基础上,从另一个角度,利用图像的稀疏先验,在贝叶斯框架下实现了新的单幅图像去雾算法.本文对式(1)进行变形,得到A -I (x )=(A -J (x ))t(x ).由于成像中存在噪声,本文在该式中添加一项噪声项n(x ),即A -I (x )=(A -J (x ))t(x )+n(x ).写出其更简洁的形式为I #(x )=J #(x )t(x )+n(x ).其中,称I #(x )=A -I (x )是∃观测图像%,J #(x )=A -J (x )是∃清晰无雾图像%,t(x )是传递系数,n(x )是图像成像噪声,这就是我们要处理的图像的成像模型.在观测图像I #已知的情况下,可以通过最大化后验概率P (J #,t |I #)来求得清晰图像J #和t.根据贝叶斯公式,可以得到P (J #,t |I #)=P (I #|J #,t)P(J #|t)P (t)P (I #).一方面,由于观测图像是已知的,P(I #)是一个常数,可得到P (J #,t |I #)&P(I #|J #,t)P(J #|t)P (t).另一方面,由于清晰图像的先验知识和场景深度是不相关的[4],有P(J #|t)=P(J #).从而有arg max J #,t{P(J #,t |I #)}=a rg m in J #,t{-lo g P (J #,t |I #)}=arg min J #,t{-log P(I #|J #,t)-lo g P(J #)-lo g P (t)}(2)下面将分别建立式(2)中各部分的概率模型.2.1 图像和噪声的先验虽然清晰自然图像的色彩千变万化,毫无规律,但是人们最近在自然图像统计学的研究中发现,自然图像的梯度有稀疏性[7 8],反映在直方图上就是在靠近零点处有陡峭的尖峰,并伴随着很长的拖尾.给人们直观上的解释就是,清晰自然图像包含大量的平滑区域,在平滑区域有着锐利的边缘.最近,人们基于图像梯度的稀疏先验提出了一些效果非常好的算法,如去噪声[9]、图像超分辨[10]、去运动模糊[11 13]等.由于稀疏先验能够比较真实地描述清晰自然图像的内在性质,本文去雾算法采用图像梯度稀疏性先验来约束优化结果,其概率密度函数为1758计算机辅助设计与图形学学报 第22卷P(J#)=const∋ex p-!i∀Q i J#∀p(3)其中Q i(i=1,2)为一阶和二阶差分算子对应的矩阵,一般取p=0.8[11].由于t主要依赖于场景点到成像平面的距离,可以认为t是分片平滑的,所以对t也应用稀疏先验,同时对t加上平滑性约束.实验表明,增加平滑性约束可以很好地抑制去雾结果图中的噪声.t的概率分布为P(t)=cons t∋ex p{- #1∀t-t^∀2- #2∀!i Q i t∀p}(4)式(4)中,第一项是t平滑性约束项,其中t^是利用文献[6]方法得到t的一个估计值;第二项是梯度稀疏性先验项; #1和 #2是与方差有关的常数项.图像的获得过程中不可避免地会出现噪声,这种噪声对求解病态逆问题有很大的影响.本文认为图像成像噪声n(x)服从零均值的高斯分布[4],即P(I#|J#,t)=const∋ex p{-∀I#-J#∋t∀2}(5) 2.2 交替迭代求解把式(3)(4)(5)代入式(2),并调整常数项的值,使首项系数为1,可以得到arg maxJ#,t {P(J#,t|I#)}=ar g minJ#,t{∀I#-J#∋t∀2+1!i ∀Q i J#∀p+ 2∀t-t^∀2+ 3∀Q i t∀p}(6)其中 1, 2, 3是首项系数归一化后产生的3个常量,这3个常量可以根据实际图像的不同情况来手动调整.一般情况下, 1, 2, 3取值在[0,2]之间即可.本文使用交替迭代的方法来求解式(6).首先固定t,则式(6)可以化简成J#=ar g minJ#{∀I#-J#∋t∀2+ 1!i∀Q i J#∀p}(7)对给定的J#,式(6)可以化简成t=arg mint{∀I#-J#∋t∀2+2∀t-t^∀2+ 3∀!i Q i t∀p}(8) 对式(7)(8)直接求解比较困难,可以分别用IRLS(iterative rew eighted least square)方法[7 8]来求解这种非凸优化问题.整个算法流程如下:Step1.初始化t0=0.Step2.对给定t j(j=0,1,2,(),根据I RLS算法计算J#j=arg minJ#j ∀I#-J#j∋t∀2+ 1!i∀Q i J#j∀p.Step3.根据计算出来的J#j来更新t j+1,即t j+1=arg mintj+1{∀I#-J#∋t∀2+2∀t j+1-t^∀2+ 3!i∀Q i t j+1∀p}.St ep4.交替执行Step2,Step3,直到∀J#j+1-J#j∀2<.St ep5.输出清晰无雾图像J=A-J#.2.3 A值的确定理论上,A的值应该选择为雾最浓的那个像素点的颜色值.但是在大多数基于单幅图像的去雾算法中,通常选择图像中亮度值最大的像素点的颜色值作为A的值.如图3所示,雾最浓的地方是c,而亮度值比较大的地方是d和e.本文认为文献[6]估计A值的方法比较合理,并且容易计算,因此使用文献[6]方法通过暗通道来直接估计出A的值,并同时求出t^的估计值.图3 A值的选择的示意图[6]3 实验结果及分析为了检验本文算法的有效性和实用性,我们利用图4a将本文算法和国内外最新提出的一些算法做了对比实验.从图4c中可以发现,本文算法不仅能够很好地恢复图像的对比度和颜色,而且处理的结果在视觉上更柔和、真实.从图4b中可以发现,本文算法处理的结果在远处过渡得更自然.对比文献[6]处理结果的一个小区域图4d和本文处理的结果的一个小区域图4e可以发现,在远处,文献[6]处理的结果噪声很多,颜色也不自然.这主要是由于文献[6]根据经验设置的阈值不符合实际图像的情况造成的.而本文处理的结果过渡自然,较好地保持住了图像的真实颜色.从文献[6]恢复出来的深度图4f中也可以明显地看出,由于设置的阈值导致深度图在远处没有变化,因此本文的深度图4g在远处过渡比较自然.1759第10期王多超,等:贝叶斯框架下的单幅图像去雾算法图4 与文献[6]的对比实验图5中对比了文献[4]的结果,可以发现,本文的结果图5c 和文献[4]结果图5b 的效果都很好.对比文献[4]处理的结果图5b 的一个小区域图5d 和本文处理结果图5c 的一个小区域图5e,可以发现,文献[4]处理的结果有点过于饱和,颜色失真.其主要原因是,文献[4]算法基于物体的表面发射性质和t 统计不相关的假设,需要足够的色彩信息和变化;而本文处理的结果在恢复图像对比度的同时很好地保持住了图像的真实色彩.图6中对比了文献[5]的结果,从给出的小区域1760计算机辅助设计与图形学学报 第22卷特写中可以发现,文献[5]处理的结果图6d色彩严重失真,这主要是由于文献[5]只关注图像对比度的增强而忽略图像色彩信息造成的,本质上,文献[5]是一种图像增强方法.本文的处理结果图6e很好地恢复了图像的色彩和对比度.4 结 论本文根据图像的稀疏先验知识,基于贝叶斯框架提出了新的单幅图像去雾的求解方法,该方法能够有效地去薄雾.在实验的过程中我们发现,对于大雾和浓雾天气,基于单幅图像的处理效果都不是太好.这是因为有雾天气条件下,图像的内容也会有一定程度的模糊.我们下一步的研究目标是对有雾天气条件下图像的模糊进行建模,来处理浓雾天气下图像的复原.参考文献(References):[1]Nayar S K,Narasimhan S G.Vision in bad w eather[C]Proceedings of th e7th IEEE In ternational Conferen ce on Computer Vis ion,Kerkyra,1999,2:820 827[2]Sch echner Y Y,Naras imhan S G,Nayar S K.Instantdeh azin g of im ages using polarization[C] Proceedings of IEEE Computer Society Confer ence on Computer Vision an d Pattern Recogn ition,H aw aii,2001,1:I 325 I 332[3]Narasim han S G,Nayar S K.Interactive(d e)w eathering ofan i mage using physic al models[OL].[2009 11 10].http: lik.imag.fr membres Bill.T riggs events iccv03 cdrom cpmcv03 31_ naras imhan.pdf[4]Fattal R.Single image dehazing[J].ACM T ransactions onGraph ics,2008,27(3):Article No.72[5]T an R T.Vis ibility in bad w eather fr om a single im age[C]Proceedin gs of IEEE Con feren ce on Com pu ter Vision and Pattern Recognition,Anchorage,2008:1 8[6]H e K M,Sun J,Tang X O.S ingle image haze rem oval usingdark chann el p rior[C] Proceedings of IEEE Conference on Com puter Vision and Pattern Recognition,M iami,2009:1956 1963[7]Levin A,Fergu s R,Du rand F,et al.Image and d epth from aconventional camera w ith a coded apertur e[J].ACM T ransactions on Graphics,2007,26(3):701 709[8]Levin A,Weiss er assisted separation of reflectionsfrom a sin gle im age usin g a s pars ity prior[J].IEEE T ransactions on Pattern Analysis and M achin e Intelligence,2007,29(9):1647 1654[9]Roth S,Black M J.Fields of experts:a framew ork forlearning imag e priors[C] Proceedings of IEEE C om puter S ociety C onference on Computer Vision and Pattern Recognition,S an Diego,2005,2:860 867[10]T appen M F,Russell B C,Freeman W T.Exploitin g th es par se derivative prior for s uper resolution and image demosaicing[OL].[2009 11 10].http w ~m tappen iccv sctv.pdf[11]Fergus R,S ingh B,H ertz man n A,e t al.Rem ovin g cameras hake from a s ingle ph otograph[J].ACM T ransactions on Graphics,2006,25(3):787 794[12]S han Q,Jia J,Agarw ala A.H igh quality motion deblurringfrom a single image[J].ACM T ran sactions on Graph ics,2008,27(3):Article No.73[13]Ch en Xi,Wang Yangang,Peng Silong.Res toration ofdegrad ed image from partially know n mixed blu r[J].Journal of C om puter Aided Design&Compu ter Graphics,2010,22(2):272 278(in Chinese)(陈 曦,汪彦刚,彭思龙.部分模糊核已知的混合模糊图像复原算法[J].计算机辅助设计与图形学学报,2010,22(2):272 278)1761第10期王多超,等:贝叶斯框架下的单幅图像去雾算法。