BEAM Technology for Autonomous Self-Analysis1
无人驾驶汽车英语PPT课件

Urban transportation services
1 2 3
Robotaxi
Autonomous taxi service, providing efficient and safe point-to-point travel.
Autonomous Public Transport
It enables scheduled and scheduled public transportation services by driving buses or subways automatically.
• Millimeter wave radar: Utilizing electromagnetic waves in the millimeter wave band for detection, it can operate under harsh weather conditions and measure the speed and distance of objects.
01
solves the problem of "last mile" delivery in cities
through autonomous driving.
Autonomous Trucking
02
Automated long-distance freight transportation to
• Transfer learning: Transfer the knowledge learned in one task to other related tasks, accelerating model training and improving performance.
无人驾驶的英语课件PPT

Other potential applications include long haul trucking, public transportation, and even self driving taxis or shared mobility services
3D Reconstruction
The creation of a 3D model of the environment from sensor data to provide more accurate representation of the scene
Path planning technology
Application scenarios for autonomous driving
Autonomous driving has the potential to revolutionize transportation, particularly in urban areas where traffic congestion and pollution are major issues
Techniques used to regulate the vehicle's velocity, acceleration, and steel angle to achieve desired performance and safety standards
Risk Assessment
The evaluation of potential hazards and their associated risks to inform decision making processes
英语作文-无人驾驶技术推动交通运输革新

英语作文-无人驾驶技术推动交通运输革新The advancement of autonomous driving technology has been a catalyst for the revolution in transportation and traffic management. This innovative technology has not only reshaped the way we perceive transportation but has also brought about significant changes in various sectors such as logistics, public transportation, and urban planning.One of the most evident impacts of autonomous driving technology is its potential to enhance road safety. With self-driving vehicles equipped with state-of-the-art sensors and algorithms, the chances of accidents caused by human error can be significantly reduced. These vehicles are capable of making split-second decisions based on real-time data, thus mitigating the risks associated with distracted driving, fatigue, and other human factors.Moreover, the adoption of autonomous vehicles has the potential to alleviate traffic congestion in urban areas. Traditional transportation systems heavily rely on human drivers, leading to inefficiencies such as traffic jams and gridlocks during peak hours. However, with the integration of self-driving vehicles into existing transportation networks, traffic flow can be optimized through coordinated communication and dynamic routing algorithms. This can result in smoother traffic patterns, shorter commute times, and reduced fuel consumption.Furthermore, autonomous driving technology holds the promise of revolutionizing the logistics and supply chain industry. Self-driving trucks and delivery vehicles have the potential to streamline the transportation of goods, making the process faster, more efficient, and cost-effective. With autonomous vehicles operating around the clock without the need for rest breaks, the speed and reliability of cargo transportation can be significantly improved, leading to enhanced supply chain management and customer satisfaction.In addition to its practical applications, autonomous driving technology also has profound implications for urban planning and infrastructure development. As cities adapt to accommodate self-driving vehicles, there is a growing emphasis on creating smart infrastructure that supports connected and automated mobility. This includes thedeployment of dedicated lanes for autonomous vehicles, the integration of intelligent traffic management systems, and the development of infrastructure for electric and shared mobility solutions. By embracing these advancements, cities can create more sustainable and livable environments for their residents while promoting economic growth and innovation.In conclusion, the emergence of autonomous driving technology represents a transformative force in the realm of transportation and traffic management. From improving road safety and reducing traffic congestion to revolutionizing logistics and urban planning, the impact of self-driving vehicles is profound and far-reaching. As we continue to embrace and harness the potential of autonomous driving technology, we have the opportunity to create a future where transportation is safer, more efficient, and more sustainable for all.。
无人驾驶技术英语作文
无人驾驶技术英语作文With the rapid development of technology, the concept of autonomous driving has become a hot topic in recent years. Autonomous driving, also known as driverless cars or self-driving cars, refers to vehicles that are capable of sensing their environment and navigating without human input. This revolutionary technology has the potential to significantly impact various aspects of our lives, including transportation, safety, and the economy. In this essay, we will explore the current state of autonomous driving technology, its potential benefits and challenges, and its implications for the future.First and foremost, let's take a look at the current state of autonomous driving technology. Many leading technology and automotive companies, such as Tesla, Waymo, and Uber, have been investing heavily in the development of autonomous driving systems. These systems rely on a combination of advanced sensors, cameras, radar, and artificial intelligence to perceive the surrounding environment, make decisions, and navigate the vehicle. While fully autonomous vehicles are not yet widely available to the public, there have been significant advancements in semi-autonomous driving features, such as adaptive cruise control, lane-keeping assist, and automatic parking.The potential benefits of autonomous driving technology are numerous. One of the most significant advantages is the potential to improve road safety. According to the World Health Organization, approximately 1.35 million people die each year in road traffic accidents. Autonomous driving systems have the potential to significantly reduce the number of accidents by eliminating human error, which is a leading cause of crashes. Additionally, autonomous vehicles have the potential to increase mobility for individuals who are unable to drive due to age, disability, or other reasons. This technology could also lead to more efficient transportation systems, reduced traffic congestion, and lower emissions, contributing to a cleaner and more sustainable environment.However, the widespread adoption of autonomous driving technology also presents several challenges and concerns. One of the primary concerns is the ethical and legal implications of autonomous vehicles. For example, in the event of an unavoidableaccident, how should an autonomous vehicle prioritize the safety of its occupants versus other road users? Furthermore, there are concerns about the potential loss of jobs in the transportation industry, as autonomous vehicles could replace human drivers in various sectors, such as trucking and ride-hailing services. Additionally, there are technical challenges related to the reliability and cybersecurity of autonomous driving systems, as well as the need for robust infrastructure to support these vehicles.Looking ahead, the future of autonomous driving technology holds great promise. As the technology continues to advance, we can expect to see more widespread adoption of autonomous vehicles in various sectors, including public transportation, delivery services, and personal mobility. This will require collaboration between technology companies, automakers, regulators, and other stakeholders to address the technical, ethical, and legal challenges associated with autonomous driving. Furthermore, the successful integration of autonomous vehicles into our transportation systems has the potential to revolutionize urban planning, reduce the need for parking spaces, and transform the way we think about transportation.In conclusion, autonomous driving technology has the potential to revolutionize the way we travel and interact with our environment. While there are still many challenges and concerns that need to be addressed, the benefits of autonomous driving, such as improved road safety, increased mobility, and more efficient transportation systems, make it an exciting and promising area of technological development. As we continue to make advancements in this field, it is important to carefully consider the implications of autonomous driving and work towards a future where this technology can be safely and effectively integrated into our lives.。
自动驾驶技术对社会的好处英语作文
自动驾驶技术对社会的好处英语作文Autonomous driving technology, also known as self-driving technology, has been a hot topic in recent years. It refers to the ability of a vehicle to operate without human intervention, relying on various sensors, cameras, and artificial intelligence algorithms. This technology has the potential to revolutionize the way we travel and bring numerous benefits to society.Firstly, one of the major advantages of autonomous driving technology is the potential to significantly reduce traffic accidents. According to statistics, the majority of accidents are caused by human error, such as distracted driving, speeding, or drunk driving. By eliminating the human factor, self-driving cars can greatly enhance road safety. They are equipped with advanced sensors that can detect obstacles, pedestrians, and other vehicles with high precision, making split-second decisions to avoid collisions. With the widespread adoption of autonomous vehicles, we can expect a dramatic reduction in the number of accidents, saving countless lives and reducing the burden on healthcare systems.Moreover, autonomous driving technology can greatly improve traffic efficiency. Traffic congestion is a common problem in many cities around the world, leading to wasted time, increased fuel consumption, and environmental pollution. Self-driving cars have the potential to address this issue by optimizing traffic flow. Through real-time data analysis and communication with other vehicles, they can coordinate their movements, maintain safe distances, and choose the most efficient routes. This can significantly reduce traffic jams and make commuting faster and more enjoyable for everyone.In addition, autonomous driving technology can have a positive impact on the environment. Traditional vehicles powered by internal combustion engines contribute to air pollution and greenhouse gas emissions, which are major contributors to climate change. Self-driving cars, on the other hand, can be electric or hybrid, reducing or even eliminating tailpipe emissions. Furthermore, their ability to optimize routes and driving patterns can lead to more fuel-efficient driving, further reducing carbon footprint. Bytransitioning to autonomous vehicles, we can make significant progress towards a greener and more sustainable future.Furthermore, autonomous driving technology has the potential to revolutionize transportation accessibility. For individuals who are unable to drive due to age, disability, or other reasons, self-driving cars can provide a newfound sense of independence and mobility. They can easily transport people with disabilities, the elderly, and those who do not have a driver's license, opening up new opportunities for employment, education, and social interaction. Additionally, autonomous taxis and ride-sharing services can make transportation more affordable and convenient for everyone, reducing the need for private car ownership.Lastly, the development of autonomous driving technology can spur economic growth and create new job opportunities. The implementation of this technology requires a wide range of expertise, including software development, sensor manufacturing, and infrastructure design. This can lead to the creation of new jobs and the growth of related industries. Additionally, the increased efficiency and safety of autonomous vehicles can have a positive impact on industries such as logistics and transportation, reducing costs and improving productivity.In conclusion, autonomous driving technology holds great promise for society. It has the potential to improve road safety, enhance traffic efficiency, reduce environmental impact, increase transportation accessibility, and stimulate economic growth. However, it is important to address the challenges and concerns associated with this technology, such as cybersecurity, ethical considerations, and the impact on the job market. With careful planning and regulation, autonomous driving technology can bring about a brighter and more sustainable future for all.。
EZ-BEAM技术特色的DC电源传感器手册说明书
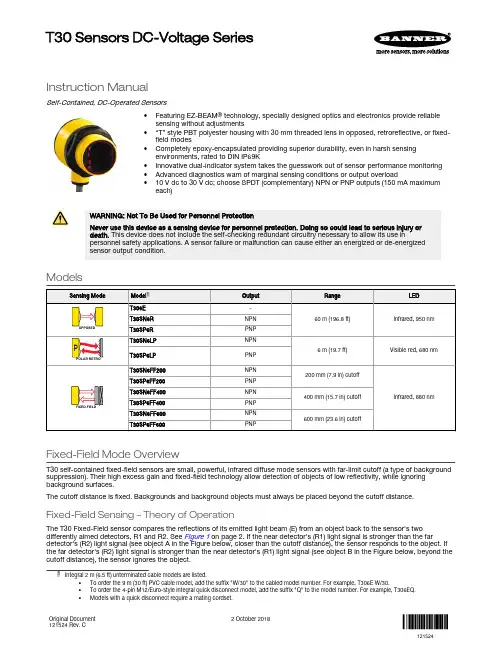
Instruction ManualSelf-Contained, DC-Operated Sensors•Featuring EZ-BEAM ® technology, specially designed optics and electronics provide reliable sensing without adjustments•“T” style PBT polyester housing with 30 mm threaded lens in opposed, retroreflective, or fixed-field modes•Completely epoxy-encapsulated providing superior durability, even in harsh sensing environments, rated to DIN IP69K•Innovative dual-indicator system takes the guesswork out of sensor performance monitoring •Advanced diagnostics warn of marginal sensing conditions or output overload•10 V dc to 30 V dc; choose SPDT (complementary) NPN or PNP outputs (150 mA maximumeach)WARNING: Not To Be Used for Personnel ProtectionNever use this device as a sensing device for personnel protection. Doing so could lead to serious injury or death. This device does not include the self-checking redundant circuitry necessary to allow its use inpersonnel safety applications. A sensor failure or malfunction can cause either an energized or de-energized sensor output condition.ModelsFixed-Field Mode OverviewT30 self-contained fixed-field sensors are small, powerful, infrared diffuse mode sensors with far-limit cutoff (a type of background suppression). Their high excess gain and fixed-field technology allow detection of objects of low reflectivity, while ignoring background surfaces.The cutoff distance is fixed. Backgrounds and background objects must always be placed beyond the cutoff distance.Fixed-Field Sensing – Theory of OperationThe T30 Fixed-Field sensor compares the reflections of its emitted light beam (E) from an object back to the sensor's two differently aimed detectors, R1 and R2. See Figure 1 on page 2. If the near detector's (R1) light signal is stronger than the fardetector's (R2) light signal (see object A in the Figure below, closer than the cutoff distance), the sensor responds to the object. If the far detector's (R2) light signal is stronger than the near detector's (R1) light signal (see object B in the Figure below, beyond the cutoff distance), the sensor ignores the object.•To order the 9 m (30 ft) PVC cable model, add the suffix "W/30" to the cabled model number. For example, T306E W/30.•To order the 4-pin M12/Euro-style integral quick disconnect model, add the suffix "Q" to the model number. For example, T306EQ.•Models with a quick disconnect require a mating cordset.T30 Sensors DC-Voltage SeriesOriginal Document121524 Rev. C2 October 2018121524The cutoff distance for the T30 is fixed at 200, 400, or 600 millimeters (7.9 inch, 16.7 inch, or 23.6 inch). Objects lying beyond the cutoff distance are usually ignored, even if they are highly reflective. However, under certain conditions, it is possible to falsely detect a background object (see Background Reflectivity and Placement on page 2).CutoffNearDetectorFarDetector ArrayAxis EmitterObject is sensed if amount of light at R1is greater than the amount of light at R2Figure 1. Fixed-Field ConceptIn the drawings and information provided in this document, the letters E, R1, and R2 identify how the sensor's three optical elements (Emitter "E", Near Detector "R1", and Far Detector "R2") line up across the face of the sensor. The location of these elements defines the sensing axis, see Figure 2 on page 2. The sensing axis becomes important in certain situations, such as those illustrated in Figure 5 on page 3 and Figure 6 on page 3.Sensor SetupSensing ReliabilityFor highest sensitivity, position the target for sensing at or near the point of maximum excess gain. Maximum excess gain for all models occurs at a lens-to-object distance of about 40 mm (1.5 in). Sensing at or near this distance makes the maximum use of each sensor’s available sensing power. The background must be placed beyond the cutoff distance. Note that the reflectivity of the background surface also may affect the cutoff distance. Following these guidelines improves sensing reliability.Background Reflectivity and PlacementAvoid mirror-like backgrounds that produce specular reflections. A false sensor response occurs if a background surface reflects the sensor's light more to the near detector (R1) than to the far detector (R2). The result is a false ON condition (Figure 3 on page 3). Correct this problem by using a diffusely reflective (matte) background, or angling either the sensor or the background (in any plane) so the background does not reflect light back to the sensor (Figure 4 on page 3). Position the background as far beyondthe cutoff distance as possible.An object beyond the cutoff distance, either stationary (and when positioned as shown in Figure 5 on page 3), or moving pastthe face of the sensor in a direction perpendicular to the sensing axis, may cause unwanted triggering of the sensor if more light is reflected to the near detector than to the far detector. Correct the problem by rotating the sensor 90° (Figure 6 on page 3). The object then reflects the R1 and R2 fields equally, resulting in no false triggering. A better solution, if possible, may be to reposition the object or the sensor. - Tel: +1-763-544-3164P/N 121524 Rev. CCutoff Reflective BackgroundFigure 3. ReflectiveBackground - Problem E = EmitterR2 = Far Detector Cutoff Figure 4. ReflectiveBackground - SolutionCutoff R1 = Near Detector R2 = Far Detector E = EmitterMoving ObjectA reflective background object in this position or moving across the sensorface in this axis and direction may cause a false sensor response.Figure 5. Object Beyond Cutoff - Problem E = EmitterR2 = Far Detector R1 = Near DetectorCutoff ReflectiveBackgroundorMoving ObjectA reflective background object in this position or moving across the sensorface in this axis is ignored.Figure 6. Object Beyond Cutoff - SolutionColor SensitivityThe effects of object reflectivity on cutoff distance, though small, may be important for some applications. It is expected that at any given cutoff setting, the actual cutoff distance for lower reflectance targets is slightly shorter than for higher reflectance targets.This behavior is known as color sensitivity.For example, an excess gain of 1 for an object that reflects 1/10 as much light as the 90% white card is represented by thehorizontal graph line at excess gain = 10. An object of this reflectivity results in a far limit cutoff of approximately 190 mm (7.5 inch)for the 200 mm (8 inch) cutoff model, for example; and 190 mm represents the cutoff for this sensor and target.These excess gain curves were generated using a white test card of 90%reflectance. Objects with reflectivity of less than 90%reflect less light back to the sensor, and thus require proportionately more excess gain in order to be sensed with the samereliability as more reflective objects. When sensing an object of very low reflectivity, it may be especially important to sense it at or near the distance of maximum excess gain.Wiring DiagramsCabled Emitters–+NPN Standard–+PNP Standard–+Key:Wire 1 = Brown Wire 2 = White Wire 3 = Blue Wire 4 = BlackP/N 121524 Rev. C - Tel: +1-763-544-31643Quick Disconnect Emitters+−not usednot usedNPN Alarm–+PNP Alarm–+SpecificationsSupply Voltage and Current10 V dc to 30 V dc (10% maximum ripple)Supply current (exclusive of load current):Emitters, Non-Polarized, Retro: 25 mA Receivers: 20 mAPolarized Retroreflective:30 mA Fixed-Field: 35 mAOutput ConfigurationSPDT solid-state dc switch; NPN or PNP outputs, depending on model Light Operate: N.O. output conducts when sensor sees its own (or the emitter’s) modulated lightDark Operate: N.C. output conducts when the sensor sees dark; the N.C.output may be wired as a normally open marginal signal alarm output,depending on wiring to power supply Output Rating150 mA maximum eachWhen wired for alarm output, the total load may not exceed 150 mA OFF-state leakage current: < 1 µA at 30 V dcON-state saturation voltage: < 1 V at 10 mA dc; < 1.5 V at 150 mA dc Required Overcurrent ProtectionWARNING: Electrical connections must bemade by qualified personnel in accordance with local and national electrical codes and regulations.Overcurrent protection is required to be provided by end product application per the supplied table.Overcurrent protection may be provided with external fusing or via Current Limiting, Class 2 Power Supply.Supply wiring leads < 24 AWG shall not be spliced.For additional product support, go to .Supply Protection CircuitryProtected against reverse polarity and transient voltagesOutput Protection CircuitryProtected against output short-circuit, continuous overload, and false pulse on power-up Output Response TimeOpposed mode: 3 ms ON, 1.5 ms OFFRetro, Fixed-Field and Diffuse:3 ms ON and OFFNote: 100 ms delay on power-up; outputs do not conduct during this timeRepeatabilityOpposed mode: 375 μsRetro, Fixed-Field and Diffuse: 750 μsRepeatability and response are independent of signal strength IndicatorsTwo LEDs (Green and Amber)Green ON steady: power to sensor is ONGreen flashing: output is overloadedAmber ON steady: N.O. output is conductingAmber flashing: excess gain marginal (1 to 1.5 times) in light condition ConstructionHousing: PBT polyesterLens: Polycarbonate (opposed-mode) or acrylic Environmental RatingLeakproof design rated NEMA 6P, DIN IP69KConnections2 m (6.5 ft) or 9 m (30 ft) integral PVC cable or Integral 4-pin M12/Euro-style quick disconnect Operating ConditionsTemperature: –40 °C to +70 °C (–40 °F to +158 °F)Humidity: 90% at +50 °C maximum relative humidity (non-condensing)Vibration and Mechanical ShockAll models meet MIL-STD-202F, Method 201A (Vibration: 10 Hz to 60 Hz maximum, 0.06 inch (1.52 mm) double amplitude, 10G acceleration)requirements. Method 213B conditions H&I. (Shock: 75G with unit operating; 100G for non-operation)Certifications - Tel: +1-763-544-3164P/N 121524 Rev. CDimensionsCabled ModelsQuick Disconnect ModelsAmber LED Output IndicatorPerformance CurvesTable 1: Opposed Mode SensorsTable 2: Polarized Retro Mode Sensors 2retroreflector (3-inch diameter). Actual sensing range may be more or less than specified, depending on the efficiency and reflective area of the retroreflector used.P/N 121524 Rev. C - Tel: +1-763-544-31645Table 3: Fixed-Field Mode Sensor Excess Gain3AccessoriesCordsetsreflectance white test card. Focus and spot sizes are typical. - Tel: +1-763-544-3164P/N 121524 Rev. CBanner Engineering Corp. Limited WarrantyBanner Engineering Corp. warrants its products to be free from defects in material and workmanship for one year following the date of shipment. Banner Engineering Corp. will repair or replace, free of charge, any product of its manufacture which, at the time it is returned to the factory, is found to have been defective during the warranty period. This warranty does not cover damage or liability for misuse, abuse, or the improper application or installation of the Banner product.THIS LIMITED WARRANTY IS EXCLUSIVE AND IN LIEU OF ALL OTHER WARRANTIES WHETHER EXPRESS OR IMPLIED (INCLUDING, WITHOUT LIMITATION, ANY WARRANTY OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE), AND WHETHER ARISING UNDER COURSE OF PERFORMANCE, COURSE OF DEALING OR TRADE USAGE. This Warranty is exclusive and limited to repair or, at the discretion of Banner Engineering Corp., replacement. IN NO EVENT SHALL BANNER ENGINEERING CORP. BE LIABLE TO BUYER OR ANY OTHER PERSON OR ENTITY FOR ANY EXTRA COSTS, EXPENSES, LOSSES, LOSS OF PROFITS, OR ANY INCIDENTAL, CONSEQUENTIAL OR SPECIAL DAMAGES RESULTING FROM ANY PRODUCT DEFECT OR FROM THE USE OR INABILITY TO USE THE PRODUCT, WHETHER ARISING IN CONTRACT OR WARRANTY, STATUTE, TORT, STRICT LIABILITY, NEGLIGENCE, OR OTHERWISE.Banner Engineering Corp. reserves the right to change, modify or improve the design of the product without assuming any obligations or liabilities relating to any product previously manufactured by Banner Engineering Corp. Any misuse, abuse, or improper application or installation of this product or use of the product for personal protection applications when the product is identified as not intended for such purposes will void the product warranty. Any modifications to this product without prior express approval by Banner Engineering Corp will void the product warranties. All specifications published in this document are subject to change; Banner reserves the right to modify product specifications or update documentation at any time. Specifications and product information in English supersede that which is provided in any other language. For the most recent version of any documentation, refer to: .For patent information, see /patents.© Banner Engineering Corp. All rights reserved。
我想发明一辆纳米汽车的作文
我想发明一辆纳米汽车的作文英文回答:Invention of a Nano Car.I have always been fascinated by the idea of inventing something revolutionary that could change the world. Recently, I have been pondering over the concept of a nano car. Imagine a car so small that it can fit in the palm of your hand! This tiny vehicle would be equipped with advanced nanotechnology, allowing it to perform incredible feats.First and foremost, the nano car would be incredibly efficient. It would run on a powerful yet compact battery that can be easily charged. With its small size and lightweight design, the car would consume significantly less energy compared to traditional vehicles. This would not only reduce our carbon footprint but also save us a substantial amount of money on fuel costs.Furthermore, the nano car would be equipped with self-driving capabilities. Using artificial intelligence and sensors, it would be able to navigate through traffic, avoiding accidents and congestion. This would make commuting much safer and more convenient. Imagine being able to sit back and relax while your car effortlessly takes you to your destination!Additionally, the nano car would be equipped with smart features. It would have a built-in GPS system that can provide real-time traffic updates and suggest the fastest routes. It would also have voice recognition technology, allowing you to control various functions of the car simply by speaking. For example, you could say, "Nano car, play my favorite playlist," and it would instantly start playing your favorite songs.Moreover, the nano car would be customizable and adaptable. It would come with interchangeable body panels, allowing you to change its appearance according to your mood or preference. You could even customize the interiorwith different colors and materials. The car would also be able to adapt to different terrains, whether it'snavigating through city streets or off-road adventures.In conclusion, the invention of a nano car would revolutionize transportation as we know it. Its efficiency, self-driving capabilities, smart features, and adaptability would make it a game-changer in the automotive industry. Imagine the convenience and excitement of owning a car that fits in your pocket and can do so much more than justgetting you from point A to point B. The possibilities are endless!中文回答:纳米汽车的发明。
科学技术与发明创造 初中 英语 导学案
话题十科学技术与发明创造课本链接话题八年级(上) Unit 7 Will people have robots?Life in the future(未来的生活)九年级(全) Unit 6 When was it invented?Inventions(发明)一.词汇科普知识科学科学家科技电脑互联网新闻工程师先驱调查,研究发明机器人模型__ 通信报纸信息键盘电话/手机磁带录像收音机发送,邮寄信菜单电话发送________电子式的现代的联网的科学技术机器调查任务光太空、空间网站创造发明vt. 生产发现测试复制二.句型1、你对未来有什么预测________________________2、你认为将来会怎么样?_______________________3、我认为会有更多污染。
_______________________4、......是什么时候发明的?______________________5、......是被谁发明的?__________________________6、…是用来干什么的?_________________________7、…是用来做......______________________________三、短语翻译1.把......变成______________2.检查______________3.试验___________________4.由......发明______________5.由......制成_____________6.由......组成________________7.取代___________ 8.越来越受欢迎_______________ 9.发生故障________________10.据我们所知____________ 11.电脑程序员____________ 12.电脑游戏_______________13.收到......的来信___________ 14.不挂断电话__________ 15. 挂断电话16. 挂断电话17. 回电话18. 打电话19. 搜寻20. 交流工具21. 发信息22. 各种各样的23. 太空站常用句型:翻译1.随着科学技术的发展,许多伟大的发明改变了我们的生活。
备考2021年高考英语一轮复习34:任务型阅读套真题
备考2021年高考英语一轮复习34:任务型阅读一、任务型阅读1. 请认真阅读下面短文,并根据所读内容在文章后表格中的空格里填入一个最恰当的单词。
每个空格只填一个单词。
HumorIf you see humor as an optional form ofentertainment, you’re missing some of its biggest benefits: Humor makesaverage-looking people look cute and uninteresting people seem entertaining.Studies show that a good sense of humor even makes you seem smarter.Best of all, humor raises your energy, and thatcan have an effect on everything you do at school, at work, or in your personallife. The increase of energy will even make you more willing to exercise, andthat will raise your overall energy even more.Humor also transports your mind away from yourdaily troubles. Humor lets you better understand life and sometimes helps youlaugh at even the worst of your problems.In my experience, most people think they have asense of humor, and to some degree that’s true. But not all senses of humor arecreated equal. So I thought it would be useful to include some humor tips foreveryday life.You don’t have to be the joke teller in thegroup in order to show your sense of humor. You can be the one who directs theconversation to fun topicsthat are ripe for others to add humor. Every partyneeds a straight person. You’ll appear fun and funny by association.When it comes to in-person humor, effort countsa lot. When people see you trying to be funny, it frees them to try itthemselves. So even if your own efforts at humor fall short, you might befreeing the long kept humor in others. People need permission to be funny insocial settings b ecause there’s always a risk that comes with humor. Forin-person humor, quality isn’t as important as you might think. Your attitudeand effort count a lot.Some people--and I was one of them--believe thathumorous complaints about the little problems of life make humor, and sometimesthat is the case. The problem comes when you start doing too muchcomplaint-based humor. One funny observation about problem in your life can befunny, but five is just complaining, no matter how smart you think you are.Funny complaints can wear people out.Self-deprecating humor is usually thesafest type, but here again you don’t want to overshoot the target. Oneself-deprecating comment is a generous and even confident form of humor. Youhave to be at least a bit self-assured to laugh at yourself in front of others.But if you do it too often, you can transform in the eyes of others from aconfident joker to a Chihuahua dog.HumorBenefits of humor●Humoris form of ________. Humorcan improve one’s________andpersonality.●Humorcan ma ke one ________ in hiswork, study, and life.●Humorhas a positive________ effectwhen we are in difficulties.________tofollow●________ othersfor a conversation of fun is as good as telling a joke yourself when showingyour sense of humor.●Qualitycounts ________ thanattitude and effort-even stupid joke can ________ others of risk and embarrassment.Traps to ________●Onehumorous complaint makes funny person. But too many complaints will ________ your audience.●Self-deprecatingcomments show one’s assurance.But too much deprecation will make a Chihuahuadog.2. 请认真阅读下列短文,并根据所读内容在文章后表格中的空格里填入一个最恰当的单词。
马斯达尔城
马斯达尔城在设计时结合了最先进的技术和传统阿拉伯聚居点的规划理念,旨在沙漠中建造出一个碳中和、零废弃的社区。
这个640hm2的项目是阿布扎比政府制定马斯达尔计划的主要组成部分,此计划旨在推动再生能源和清洁能源解决方案的发展,创造一个超越石油时代的新世界。
马斯达尔城将成为推动能源生产新创意的中心,汇集最高水准的专业技术。
这里所汇集的知识已帮助阿布扎比在可持续建筑的“绿色建筑条例(Estidama)”评级系统方面取得重大进步,并且实践后的环境研究表明福斯特建筑事务所所制定的总体规划方案在减少体感温度,延长城市中适宜季节的时间方面功效显著。
马斯达尔城的位置在战略规划时就考虑到阿布扎比的交通基础设施,通过现有的道路和铁路线与邻近的社区和国际机场相连。
城市本身是一个紧凑型的、土地混合利用的城市区,有相当高比例的劳动力居住在这里,并配有住宅区。
居民到快速交通站点和便利设施的距离都很短,林荫街道和庭院提供了有吸引力的步行环境,遮蔽极端天气,这些设计都是为了鼓励步行。
马斯达尔城也是世界上第一个在街道层面不需要化石能源交通工具的现代社区。
从城外来的人可以将私人交通工具停放在区域外的停车场内,然后搭乘个人快速交通(PRT)网进城。
PRT网中的车队全为无人全自动驾驶,可以将乘客直接送至他们的家门口。
这一交通网络被设置在马斯达尔城的主地面层之下,将地上密集、凉爽、有阴凉的狭窄街道留给行人。
分阶段城市扩张的方式避免了零星开发所带来的不利影响。
一道外墙清晰地标记了建成区发展的边界,这一手法借鉴了传统城郭的紧凑型规划特点。
城市周边的土地则布置了实验场地、研究中心、光伏电厂来满足社区彻底的能源独立。
在这个土地混合利用、低层、高密度的开发区内,马斯达尔城内还坐落了国际可再生能源机构的总部和近期刚刚完工的马斯达尔理工学院。
城市的建设被分为马斯达尔城文∕杰拉德·埃文登 福斯特建筑事务所资深执行合伙人项目名称:马斯达尔城项目地点:阿布扎比 阿拉伯联合酋长国设计机构:福斯特建筑事务所总面积:600hm2建筑占地面积:1 400 000m2建造时间:2007年至今TExT/ Gerard Evenden, Senior Executive Partner at Foster + Partners Masdar CityMasdar City combines state-of-the-art technologies with the planning principles of traditional Arab settlements to create a desert community that aims to be carbon neutral and zero waste. The 640-hectare project is a key component of the Masdar Initiative, established by the government of Abu Dhabi to advance the development of renewable energy and clean-technology solutions, which is planning fora future that is not dependent on oil. The city is a centre for the advancement of new ideas on energy production, with the ambition of attracting the highest levels of expertise. Knowledge gained here has already aided the development of Abu Dhabi’s ‘Estidama’ rating system for sustainable building, and post-occupancy environmental studies have demonstrated the efficacy of the Foster + Partners masterplan in reducing felt temperatures andprolonging the moderate season in the city.Strategically located for Abu Dhabi’s transportinfrastructure, Masdar is linked to neighbouringcommunities and the international airport by existingroad and rail routes. The city itself is a compact,mixed-use, urban quarter with a high proportionof the workforce residing on site, combined with aresidential catchment area. With short distances torapid transport links and amenities, it is designedto encourage walking, with shaded streets andcourtyards offering an attractive pedestrianenvironment, sheltered from climatic extremes.The city is also the first modern community in theworld to operate without fossil-fuelled vehicles atstreet level. Those commuting to Masdar by privatetransport leave the vehicles at the site perimeterparking areas and continue their journey into the cityvia the Personal Rapid Transport (PRT) network. Afleet of autonomous, driverless vehicles runs on thenetwork, ferrying people right to their doorstep. ThePRT network is located under the main deck level ofMasdar, leaving the dense network of cool, shaded,narrow streets above free for pedestrians.A phased approach to the expansion of the city allowsgrowth without the negative effects of sporadicdevelopment. A clearly demarcated external wallmarks the boundary for built development, mirroringProject name: Masdar City Location: Abu Dhabi, UAE Designer team: Foster + Partners Site area: 600hm2Gross floor area: 1 400 000m2 Design time: 2007-马斯达尔大学纵剖面图马斯达尔大学横剖面图两部分,由一个线性公园连接,并且分阶段建造,从较大的部分开始实施。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ryan Mackey Mail Stop 126-147 California Institute of Technology Jet Propulsion Laboratory 4800 Oak Grove Drive Pasadena, CA 91 109 818-354-9659 Mark James Mail Stop 126-347 California Institute of Technology Jet Propulsion Laboratory 4800 Oak Grove Drive Pasadena, CA 91 109 818-354-8488 Mark.James@ Michail Zak Mail Stop 126-347 CaliforniaInstitute of Technology Jet Propulsion Laboratory 4800 Oak Grove Drive Pasadena, CA 91109 8 18-393-5351 Michail.Zak@
Ryan.M.Mackey@
Han Park Mail Stop 126-347 California Institute of Technology Jet Propulsion Laboratory 4800 Oak Grove Drive Pasadena, CA 9 1109 818-354-8564 Han.G.. Such a self-diagnosis must not only provide a safe operating envelope, but must perform, at worst, comparably to spacecraft experts in a control room. A system that is insensitive, generates false alarms, or requires oversight will not be effective, because such inefficiencies will be amplified in a “streamlined”process. The basic premise of BEAM is the following: Construct a strategy to characterize a system kom all available observations, and then train this characterization with respect to normal phases of operation. In this regard the BEAM engine functions much as a human operator does through experience and other available resources (known architecture, models, simulation, etc.) an allowed set of behavior is “learned” and deviations from this are noted and examined. Such an approach should be applied as a complement to simplistic but reliable monitors and alarms found in nearly all instrumented systems. The approach should also be constructed such that information products can be used to drive autonomous decisions, or to support the decisions of human operators. In other words, the system must allow for intervention and aid it wherever possible. If this is not done, it is difficult for spacecraft experts to gain trust in the system, and the benefits of beacon operation (or any similar cost-saving approach) will be doomed from the outset. In this manner BEAM is not solely suited to beacon monitoring, but is more broadly applicable to monitored or wholly autonomous systems. Two important features make BEAM a standout among the various fault-detection technologies that have been advanced. The first is its broad range of applicability. This approach has been used with sensor and computed data of radically different types, on numerous systems, without detailed system knowledge or a priori training. Separate components are included to treat time-varying signals and discrete data, and to interpret the combination of results. The second is its ability to detect, and with few exceptions correctly resolve, faults for which the detector has not been trained. This flexibility is of prime importance in systems with low temporal margins and those with complex environmental interaction. This ability also comes with few requirements in terms of detector training. Since its original inception, BEAM has been matured and proven on many separate applications, both on-board and off-board. We will consider the architecture and theory behind this approach and briefly illustrate the implications of such a strategy from these applications.
Abstract- BEAM (Beacon-based Exception Analysis for Multimissions) is an end-to-end method of data analysis intended for real-time fault detection and characterization. It provides a generic system analysis capability for potential application to deep space probes and other highly automated systems.
1. 2. 3. 4. 5.
INTRODUCTION BASICARCHITECTURE COMPONENT-LEVEL DESCRIPTIONS APPL~CATIONS CONCLUSION
* Updated September 15,2000
0-7803-6599-2/01/$10.00 Q 2001 IEEE
This paper describes in brief the architecture, application, and operating theory of BEAM. We will also make reference to companion papers [l] and [2], which describe individual elements of the technology in mathematical detail. BEAM provides a generalized formalism for diagnostics and prognostics in virtually any instrumented system. Consideration is given to all standard forms of data, both time-varying (sensor or extracted feature) quantities and discrete measurements, embedded physical and symbolic models, and communication with other autonomyenabling components such as planners and schedulers. This approach can be adapted to on-board or ground-based implementations with no change to the basic operating theory. The approach will be illustrated with an overview of application types, past validations, and ongoing efforts. TABLE OF CONTENTS