数学建模案例驾驶员各驾驶环节疲劳分析
驾驶疲劳评价的模糊数学模型
文章编号:100628309(2003)0120065202作者简介:张南(19762 ),男,河北承德人,硕士研究生,研究方向为交通安全等。
驾驶疲劳评价的模糊数学模型张南,蒋葛夫,李相勇(西南交通大学交通运输学院,四川成都610031) 摘要:由于驾驶疲劳的评价过程中涉及到的因素众多,使得对疲劳程度的分级存在着模糊性。
该文建立了一种多因素多级模糊数学评价模型,对驾驶疲劳进行了模糊综合评价,为驾驶疲劳的评价提供了一种途径。
关键词:驾驶疲劳;模糊数学;模糊综合评价中图分类号:U491.2+54;O159 文献标识码:A1 介绍驾驶疲劳是指驾驶员的生理和心理负荷水平增大致使驾驶能力下降,使驾驶作业的安全可靠度降低,从而导致交通事故发生的概率加大。
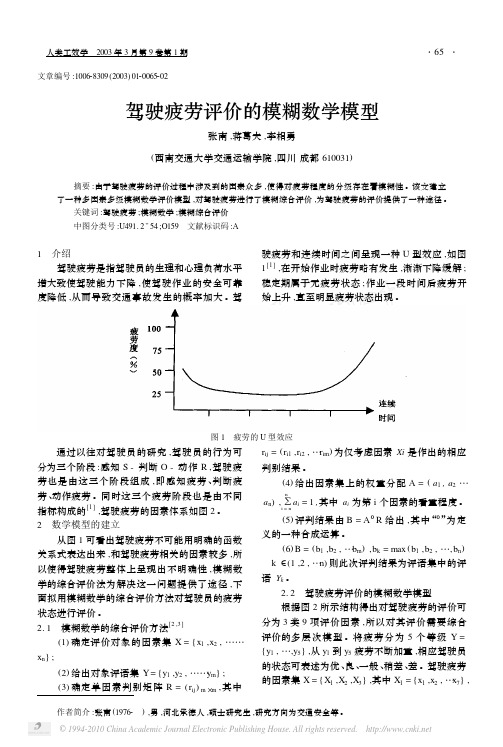
驾驶疲劳和连续时间之间呈现一种U 型效应,如图1[1],在开始作业时疲劳略有发生,渐渐下降缓解;稳定期属于无疲劳状态;作业一段时间后疲劳开始上升,直至明显疲劳状态出现。
图1 疲劳的U 型效应 通过以往对驾驶员的研究,驾驶员的行为可分为三个阶段:感知S -判断O -动作R ,驾驶疲劳也是由这三个阶段组成,即感知疲劳、判断疲劳、动作疲劳。
同时这三个疲劳阶段也是由不同指标构成的[1],驾驶疲劳的因素体系如图2。
2 数学模型的建立从图1可看出驾驶疲劳不可能用明确的函数关系式表达出来,和驾驶疲劳相关的因素较多,所以使得驾驶疲劳整体上呈现出不明确性,模糊数学的综合评价法为解决这一问题提供了途径,下面拟用模糊数学的综合评价方法对驾驶员的疲劳状态进行评价。
2.1 模糊数学的综合评价方法[2,3](1)确定评价对象的因素集X ={x 1,x 2,……x n };(2)给出对象评语集Y={y 1,y 2,……y m };(3)确定单因素判别矩阵R =(r ij )m ×m ,其中r ij =(r i1,r i2,…r im )为仅考虑因素Xi 是作出的相应判别结果。
(4)给出因素集上的权重分配A =(a 1,a 2…a n ),ρni =n a i =1,其中a i 为第i 个因素的看重程度。
基于人机工程学的驾驶疲劳模型

基于人机工程学的驾驶疲劳模型王海勇梁锋(中国民航学院安全学院天津300300)摘要基于人机工程学原理,建立了驾驶疲劳形成的人机工程学模型,并从人机工程学的角度分析了驾驶疲劳的各种形成因素。
对预防驾驶疲劳,保障行车安全,汽车人机界面设计具有积极的理论与现实意义。
关键词人机工程学驾驶疲劳疲劳模型Drivers c Fatigue Mode Based on ErgonomicsWang Haiyong Li ang Feng(Safet y College,Civil Aviation Unive rsit y o f China Tianjin300300)Abstract Based on the theory of ergonomics,an ergonomics mode of forming drivers c fati gue is es tablis hed and all kinds of formi ng factors are analyzed from ergonomics,which provides theoretical and realis tic meani ng to prevent drivers c fatigue,safe guard drivers c s afety and to the desi gn of human-machi ne interfaces.Keywords ergono mics drivers c fati gue fatigue mode汽车驾驶工作属于操作复杂的机械类作业,人汽车环境系统是典型的人机系统。
在这个系统中,驾驶员要不断接收外部信息,监视车辆运行和道路状况,并根据需要操纵汽车,使汽车安全地行驶。
因此,对驾驶疲劳的形成机理分析,应该在人汽车环境系统中进行。
1人汽车环境系统的信息交流在驾驶过程中驾驶员接收车内外各种信息,由中枢神经系统作出反应,指挥手脚等执行器官操纵汽车安全行驶。
疲劳驾驶分析

5
药物或酒精影响
服用某些药物或饮酒 后,会影响人的神经 系统和判断能力,使 驾驶员容易感到疲劳
3
章节 PART
疲劳驾驶的影响
疲劳驾驶的影响
Annual work summary
疲劳驾驶的影响主要体现在以下几个方面
反应迟钝:驾驶员在疲劳状态下,反应速度会变慢 ,对突发事件的应对能力会降低 判断失误:疲劳驾驶可能导致驾驶员对路况、车速 、距离等判断失误,从而引发事故 操作失误:疲劳驾驶可能导致驾驶员操作失误,如 错踩油门、误打方向盘等 无视交通规则:在疲劳状态下,驾驶员可能无视交 通规则,如超速、闯红灯等 引发疾病:长时间疲劳驾驶可能引发一些疾病,如 高血压、心脏病等
•第五级
12
应对疲劳驾驶措施
6 利用科技手段
现在有很多科技手段可以帮助驾驶员缓解疲劳,如车载按摩座椅、自动驾驶辅助系统等
7 避免超载
超载会增加车辆的负担,影响驾驶员的判断能力和反应速度,应避免超载驾驶
加强安全宣传和教育 8 政府和相关部门应加强安全宣传和教育,提高公众对疲劳驾驶危害的认识,引导驾驶员正确对待疲劳
疲劳驾驶分析
1 2 3 4
1
章节 PART
引言
引言
疲劳驾驶是导致交通事故的重 要原因之一
在长时间的驾驶过程中,驾驶 员容易感到疲劳,从而影响其 反应速度、判断能力和操作精
度,进而导致事故
本文将对疲劳驾驶进行分析, 探讨其成因、影响和应对措施
2
章节 PART
疲劳驾驶的成因
疲劳驾驶的成因
疲劳驾驶的主要成因包括以下几点
驾驶问题
建立完善的法规和监管机制 9 政府应建立完善的法规和监管机制,对疲劳驾驶行为进行严格监管和处罚,从严惩处疲劳驾驶行为。
自动驾驶中的疲劳预测模型

自动驾驶中的疲劳预测模型作者:陈宝靖张旭来源:《中国新通信》 2017年第16期一、引言疲劳驾驶是导致交通事故的重要原因之一。
中国公安部的统计数据表明,2008 年中国因疲劳驾驶共导致2568 起交通事故,由此可见,对一种可靠且有效疲劳驾驶检测系统的研究的具有重要价值[1]。
近年来,国内外研究者对疲劳检测系统有基于生理指标的检测方法和基于驾驶员行为特征的疲劳检测方法两种办法。
其中基于生理指标的检测方法在一定程度上妨碍驾驶员的操作。
基于驾驶员行为特征的疲劳检测方法虽不妨碍驾驶操作,也能达到一定检测精度,但个人操控习惯与行车环境不同时,会影响其鲁棒性。
本文采用基于机器视觉的非接触式疲劳检测方法,通过采集人脸图像,检测嘴部张合程度判断驾驶员是否打哈欠,以此进行疲劳检测。
这种办法可靠性高,能有效减少错误率。
二、脸部及嘴部图像检测人脸检测是嘴部检测的基础,本文采用基于Adaboost 算法的haar 特征的分类器将脸部区域选中,Adaboost 算法是将样本作为输入,每一次迭代都得到一个加权错分代价最小的弱分类器,不断优化图像分割,从而得到更精准的人脸识别图像,提高了图像分割的效率。
不断迭代使得分类器的分类能力不断加强,逐级优化后最终得到一个级联Haar 矩形特征的人脸检测器。
嘴部检测则根据嘴部区域中的YCrCb 颜色空间特点来进行检测,其中Y 代表颜色的亮度分量,Cr、Cb 分别代表颜色的红色分量和蓝色分量。
由于唇色区域红色成分较肤色更多,所以Cr 值较大而Cb 值较小,基于此可以根据明度和色度信息构造特征强化图的方法来直接定位嘴局部特征。
三、嘴部图像分割及识别对嘴部图像的分割首先要将RGB 彩色空间转换到LAB彩色空间[2]。
RGB 三原色模型中两点间的欧几里德距离与颜色距离呈非线性关系,不利于进行图像的彩色分割,而且由于驾驶员坐在车里摄像头所采集到的图片常常受到驾驶员单侧车窗光照的影响,存在的大量干扰信息,使得嘴部区域分割困难,因此本文采用LAB 空间对图像进行处理。
模拟驾驶过程中腰部疲劳的表面肌电信号分析
文章编号:100628309(2004)0320010203 作者简介:焦昆(1977- ),男,山东济宁人,博士研究生,研究方向:人机工程学,汽车驾驶疲劳。
模拟驾驶过程中腰部疲劳的表面肌电信号分析焦昆,李增勇,陈铭,王成焘(上海交通大学机械工程学院生命质量与机械工程研究所,上海 200030) 摘要:通过sE MG 的时域与频域分析评估在模拟驾驶过程中的驾驶员腰部疲劳。
40个男性样本参加实验((29.7±3.1)岁),随机分成A ((28.8±3.4)岁)、B ((30.6±2.7)岁)两组,A 组参加90min 的模拟驾驶操作实验,B 组保持自由坐姿。
实验后分别计算分析实验样本的积分肌电值(IE MG )和功率谱中值频率(MF )。
结果表明A 组实验数据呈现良好的线性负相关(P <0.005和P <0.0001)。
研究表明样本在实验结束后腰部肌肉疲劳加重。
认为用sE MG 信号的时频分析评估驾驶员肌肉疲劳状态是可行的。
关键词:腰部疲劳;积分肌电值(IE MG );中值频率(MF );相关性中图分类号:T B18;R741.044 文献标识码:AsEMG Analysis of Lumbar F atigue during Simulated DrivingJ I AO K un ,LI Z eng 2y ong ,CHE N Ming ,W ANG Cheng 2tao(Institute of Life Quality and Mechanical Engineering ,School of Mechanical Engineering ,Shanghai Jiaotong University ,Shanghai 200030,China ) Abstract :The investigation was to evaluate drivers ’lumbar fatigue via sE MG signals based on time 2and frequency 2do 2main analysis.F orty healthy males ((29.7±3.1)years )were randomly divided into 2groups ,G roup A ((28.8±3.4)years )and G roup B ((30.6±2.7)years ).Subjects in G roup A per formed simulated driving task and G roup B kept free sitting pos 2ture for 90min.IE MG and MF were calculated and analyzed after the task.The results indicated that data of IE MG and MF in G roup A showed a significant negative correlation (P <0.005and P <0.0001).Parameters and errors of linear regression equation of all indices were given finally.I t is concluded that lumbar fatigue of drivers increased after simulated driving and it was feasible to evaluate drivers ’lumbar fatigue via sE MG signals based on time 2and frequency 2domain analysis.K ey w ords :lumbar fatigue ;IE MG;median frequency (MF );correlation 驾驶员腰部疲劳是近年来日益受重视而又难以解决的一大问题。
基于驾驶员生理特征分析的驾驶疲劳状态识别方法研究

The f缸igue driVing experiments were carried out on t11e car s曲ulato r.The subjects’physi0109ical data was acquired by ProComp Infiniti,a multi·modality system for real·time computerized biofeedback 蚰d d砒a acq试sition. The
tIlat is able to detect the three phases of f撕gue based on HR,EMG and
Respiration chaIlges.In this sofhvare,the whole experiment procedure and
physiological data can be replayed in me interface,at the same time,the
日本的事故统计揭示,因疲劳产生的事故约占l‰1.5%[2】。目前,由于驾驶
疲劳成因复杂、疲劳征兆因人各异,所以至今还无法通过简单方便有效的方 法进行监测,为事故的发生留下了重要的隐患。
近年来,传感器技术、计算机技术、网络技术以及人工智能技术的不断 发展使驾驶疲劳实时监测成为可能。因此,越来越多的国内外专家学者开始 致力于研究运用车载传感器实时获取驾驶员的驾驶行为信息与生理信息,利 用这些信息判断驾驶员的精神状态以及车辆行驶的安全性,并采用相应报警 和防护措施,以减少由于驾驶疲劳而导致的道路交通事故。
physiological in士brmation database was developed. Using these date we
关于疲劳驾驶行为的研究和建模
《P LC 技术应用 200 例》
邮局订阅号: 82-946 360 元 / 年 - 273 -
软件天地
中 文 核 心 期 刊 《 微 计 算 机 信 息 》( 测 控 自 动 化 )2007 年 第 23 卷 第 8-1 期
double R1,R2; double temp; R1=x*cos(sita)+y*sin(sita); R2=- x*sin(sita)+y*cos(sita); temp =exp (- 0.5* (R1*R1/(sigmaX*sigmaX) +R2*R2/(sig- maY*sigmaY))); *realpart=temp*cos(2*3.14*R1/lmd); *impart=temp*sin(2*3.14*R1/lmd); } 以上程序是 Fourier 滤波器的实现方法。
驾驶员被动疲劳的行为分析与测量
驾驶员被动疲劳的行为分析与测量驾驶疲劳是在人机交互过程中出现的一种任务相关疲劳。
随着疲劳进程的加深,驾驶疲劳的行为表现发生显著改变。
与驾驶任务相关的疲劳有两种,一种是主动疲劳,一种是被动疲劳。
在现代化驾驶条件下,被动疲劳源于在低负荷或者使用自适应巡航等自动化技术的环境下,为了保持驾驶绩效所付出的努力。
随着车辆的自动化水平越来越高,被动疲劳的研究也逐步受到重视。
本研究在综述以往有关被动疲劳的理论和实证研究的基础上,首次将研究对象聚焦于被动疲劳,对驾驶疲劳的性质及主动疲劳和被动疲劳的划分依据进行了深入的探讨;采用现场研究与实验室研究相结合,生理、心理与绩效多指标评估相结合的方法对被动疲劳进行了全面的测量和系统的分析;并探究了被动疲劳的预测指标。
本研究不仅对促进疲劳机制的深入理解具有重大的理论意义,而且对于完善驾驶疲劳的预测指标体系,指导自动化驾驶技术的应用具有一定的实践意义。
研究一:中文版邓迪压力状态量表的修订。
在中英文互译、文字分析及专家评定的基础上,对邓迪压力状态量表进行信度、效度检验(N=362),并对量表的结构进行探索性因素分析和验证性因素分析,确定问卷的适用性,为后续研究提供测量工具。
研究二:在真实的驾驶场景中,首先对不同性质的驾驶任务所引起的压力状态进行测量(N=109),通过实车检验市内路和高速路是否能够作为引起驾驶员主动疲劳和被动疲劳的驾驶任务,并分析两种驾驶任务下的心理行为表现差异,从而为对不同性质的驾驶任务所引起的驾驶疲劳进行科学分类提供依据,确定驾驶疲劳的性质。
其次,在前面研究的基础上,采用自然实验法将研究对象聚焦于被动疲劳,对典型的被动疲劳任务——长途营运客车驾驶员进行9个小时的追踪测量(N=30),探究驾驶员被动疲劳的生理表现特点及与主观报告疲劳的关系。
研究三:在实验室中利用驾驶模拟器诱发典型的主动疲劳和被动疲劳状态,首先考察主动疲劳与被动疲劳在心理表现上的差异(N=63),其次考察被动疲劳的生理和绩效表现(N=63),结合前面研究的结果,系统分析被动疲劳的行为表现并精准计算其阈值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
由拉氏反变换可得出:
M1(t) = K1(T1 + t)
(10) (11) (12)
图 5 表示了感知阶段驾驶员在疲劳状态下对斜坡函数的响应曲线。
正常状态下,驾驶员的感知输出为 M1(t)
,疲劳状态下驾驶员的感知输出为
M
' 1
(t
)
。
根据研究表明,人在多踪信息同步处理过程中输入与输出是存在比例系数的。可用下 面的通式表示:
∫ m3 (t )
=
K3
⎡ ⎢e3(t) + ⎣
1 T3
t 0
e3 (t )dt
+ T3'
de3 (t dt
)
⎤
⎥ ⎦
对上式进行拉氏变换得:
M
3
(s)
=
K3
(1
+
1 T3s
+
T3's)e3
(s)
该阶段的传递函数为:
H3
(s)
=
K3
(1
+
1 T3s
+
T3's)
式中
K3 -动作阶段信息处理比例系数;
(7) (8) (9)
关键词:驾驶疲劳;传递函数;拉氏变换与拉氏反变换;交通安全
第一部分 问题综述
汽车在道路上发生交通事故,总与驾驶人员有关。驾车人发生交通事故的主要原因:一 是酒后开车,二是疲劳驾驶。在一些发达国家里,从交通事故的大量案例分析中得出的结论 认为:开车人因疲劳驾驶所造成的道路交通事故,约占交通事故总数的 10%至 12.8%。
3、微分输出,与感知处理控制环节一样,通过预测混合输入信号的变化率,来产生相 应的输出信号,作为动作输出函数的微分部分。一般来说,在相同的条件下,输入信号的变 化率越大,刺激及其变化就越容易被个体感知,产生的感知输出信号也就越强。微分输出的 时间常数同样由不同个体及其状态所决定。
根据以上分析,可得动作输出数学模型为:
第三部分 数学模型的建立及分析
1,驾驶行为过程中传递函数的引入 在驾驶行为中,从感知、判断到动作都是驾驶员通过对汽车运行状态的分析后自我控
制的过程。控制是在以反馈理论为基础的自动调节原理的基础上产生的。根据经典控制理论, 控制工程的数学工具主要是传递函数,在这里,我们把传递函数引入到驾驶员的驾驶操作控
疲劳驾驶的流行是一个严重的公共健康问题。在美国,每年有 10 万起汽车相撞事故、 4 万名伤者和 1150 位死者是有驾驶中的昏昏欲睡所造成的。在所有造成交通意外的主要因 素中,疲劳驾驶对警方和其他交通意外调查人员来说是最难发现和估量的。在中国,疲劳即 使现象可以说普遍存在。几乎每个司机都有疲劳驾驶的经历。
1、比例输出,即将感知阶段中生成的感知输出经通道传递过程中产生状态偏差后得到
e2 ( s) 作为判断处理环节的输入函数,然后成比例的转换成输出信号(判断输出函数的线性
部分)。其中比例常数由不同的个体所处的不同状态决定。 2、积分输出,即通过对由前向处理通道所接收到的输入信号的进行累积的分析,做出
判断,产生相应的判断输出信号。驾驶员在根据判断输出对机车状态进行调整的过程中,能 够对一定时间区间内的输入信号做出综合分析并进行相应的判断,根据判断不断寻找新的平
2制当中。ຫໍສະໝຸດ 传递函数是用拉普拉斯变换变换建立的一种数学模型,用于研究对象的运动,在这种
方法中,自变量不是时间,而是拉氏变换中的复数变量 s 。一个线性动态系统的传递函数,
是零初值条件下输出量的拉氏变换的像函数与输入量的拉氏变换的像函数之比,由于系统是 线性的,所以传递函数不因输入量和输出量函数变化而异。
6
可以看成是随时间逐渐变化的,在此我们把它简化为一个单位斜坡函数 r(t) = t 来分析(如
图 4 所示)。
单位斜坡函数的拉氏变换为:
R(s)
=
1 S2
在感知阶段,斜坡函数输入下的输出为:
M1(s)
=
H1(s) ⋅ R(s)
=
K1(1+ T1S ) ⋅
1 S2
=
1 K1( S 2
+ T1 ) S
其一,把驾驶人员看成是一个黑箱,即不管其中环节的复杂程度,只关心黑箱系统的 输入和输出信号,并用拉氏变换构建传递函数。
其二,把复杂的路面交通状况抽象成单位斜坡函数,因为尽管外界信息(环境输入信 号)变化万端,驾驶过程中各种环境信息输入还是有类似特点的,即当我们只取一个较短的 时间段,道路环境的输入信号大部分可以看成是随时间逐渐变化的。
3
定。
根据以上分析,可得感知输出数学模型为:
m1
(t
)
=
K1
⎡ ⎢e1 ⎣
(t
)
+
T1
⋅
de1 (t
dt
)
⎤
⎥ ⎦
(1)
式中 K1 -感知阶段信息处理比例系数;
T1 -感知阶段微分时间常数。
对上式进行拉普拉斯变换得:
M1(s) = K1(1+ T1s)e1(s)
(2)
所以感知阶段传递函数为:
H1(s)
驾驶员各驾驶环节疲劳分 析的数学模型
学院:竺可桢学院 专业:混合班 姓名学号(按学号顺序排列):
林中叶 3013001063 钱倩 3013001125 王露 3013001183
驾驶员各驾驶环节疲劳分析
1
摘要:在对驾驶行为各环节的分析当中引入传递函数,建立了数学模型,通过拉氏变
换与拉氏反变换简化分析过程,然后通过时域分析指出驾驶疲劳的量化特征。
=
M1(s) e1 ( s)
=
K1(1+ T1s)
(3)
可见,驾驶员感知效果的获得与信息处理过程中的比例系数、该过程中人体的微分时间 常数有关。在疲劳状态下人的感知能力下降,就需要从这两个参数切入做深入探讨。
2.2 判断阶段传递函数
判断阶段的分析主要是对延迟与滞后的控制校正,这一环节采用 PI 控制模型(如图 2 所示),侧重于讨论比例和微分控制。感知处理器官输出的感知输出经过处理通道传递,并 产生状态偏差后,进入判断处理控制环节,其产生的判断输出主要取决于以下两个方面:
疲劳是人工作或运动到一定时候出现整个机体工作能力暂时降低的现象。人疲劳时,大 脑皮质兴奋性降低,抑制过程加深。疲劳驾驶是指驾驶员每天驾车连续超过八小时或得从事 其他劳动体力消耗过大或者睡眠不中,以致行车中困倦瞌睡、四肢无力,不能及时发现和准 确处理路面交通情况。驾驶员疲劳会使视力下降,注意力不集中,对环境,速度,距离判断 失误。对驾驶员的感觉、知觉、判断产生影响,甚至有时会在驾驶过程中产生幻觉或短暂的 睡眠。这都是造成交通事故的重要因素
2,驾驶行为各环节的传递函数 当驾驶员受到某种刺激(如听觉、视觉信号,轨迹偏差输入)后做出相应的动作,对人
来说最简单的控制动作就是把信号成比例的变成输出信号,即比例动作;另外,人还能够预 测分析输入信号的变化率来产生相应的动作,即微分动作;此外,当汽车运行状态不合理时, 驾驶员还可以改变其运动状态寻找平衡点,输出与输入信号积分成比例的信号,即积分动作。
4
衡点;在调整状态过程中,新的输入信号随着时间的推移陆续加入,成为判断依据的一部分。 经历的时间越长,驾驶员对输入信号的积累越多,对环境做出的判断就越准确,从而产生的 判断输出信号就越强。积分输出的时间常数与比例输出常数一样,由一定环境下的个体状态 所决定。
根据以上分析,可得判断输出数学模型为:
⎡
1 )
T2 s
(4)
(5) (6)
可见,驾驶员的判断过程与该阶段的信息处理比例系数、人体的积分时间常数有关。在 疲劳状态下人的判断能力下降,就需要从这两个参数入手深入探讨。
2.3 动作阶段传递函数
在具体的驾驶操作阶段,情况与前两个环节有些不同,即在前面感知、判断的基础上开 始动作实施,而在实施的过程中又不断接收到汽车运行状态的反馈信息,需要对输入的信息 进行重新处理,循环往复。
K
= We
log2
⎡1 ⎢⎣1− r2
⎤ ⎥⎦
(13)
7
式中 K -信息处理比例系数; We -有效信号带宽; r -输出与输入信号幅值比。
当驾驶员出现疲劳时,他的感知有效信号带宽We1 明显变小(但实验表明,输入与输出
信号幅值比 r1 基本不变),导致感知阶段信息比例系数 K1 变小(用 K1' 表示),于是感知输出
1t
⎤
∫ m2 (t)
=
K2
⎢e2 ⎣
(t
)
+
T2
e(t)dt ⎥
0
⎦
式中 K2 -判断阶段信息处理比例系数;
T2 -判断阶段积分时间常数;
H2 (s) -判断阶段传递函数。
对上式进行拉氏变换得:
M
2
(s)
=
K2
(1
+
1 T2 s
)e2
(s)
所以有:
H 2 (s)
=
M 2 (s) e2 (s)
=
K2 (1+
在控制理论中所研究的系统,都可定义为有若干元件所组成,用来完成某种给定任务的 一种组合。以此类推,可把驾驶员行车过程中的各个环节(感知、判断、操作)分别提取出 来,作为各个控制子系统加以分析,以细化、量化各驾驶环节。在拉普拉斯变换的基础上, 引入描述系统在复数域中的数学模型——传递函数,不仅可以表征系统的动态性能,而且可 以研究系统的结构或参数变化对系统性能的影响。
1、比例输出,即将输入的产生状态偏差后的感知刺激 e1 ( s) ,成比例的转换成输出信
号,比例常数由不同的个体所处的不同状态决定。(注:状态偏差是指被控制量的数值与其 整定值之间的差值,我们可以根据状态偏差来改变被控制对象的某个物理量,通过它影响被 控制量,使之向整定值变化。)