高速打纬共轭凸轮运动规律的设计分析
剑杆织机共轭凸轮打纬机构运动的优化设计

A C A D E M lC
剑 杆 织机 共轭 凸轮 打纬 机 构 运 动 的优 化设计
山东 日发 纺织 机 械有 限公 司 孙 庆 军 /文
摘 要 :打 纬 共轭 凸 轮机 构 的设 计 非常 关 键 ,通 过 用最 小二 乘 拟 合方 法 进行 摆 杆运 动 曲 线 的拟 合 ,对 型面 曲 线进 行 优 化设 计 。
可 以看 到 :最小 二 乘 拟 合 曲 线过 滤 掉 了 原 加速 度 曲 线 中 的锯 齿状 波动 误 差 。保 留 了原 位 移 、速 度 、加 速 度 曲 线 设 计 的 特 点 。该 曲 线 与原 始 摆 杆 曲 线 的 “角位 移 ” 的 最 大 误 差仅 为 0.0545度 (发 生在第 58点 ),吻合程度 非常高 。
2 剑 杆 织 机 打 纬 共 轭 凸轮 型 面 曲线 的优 化 设 计
RF20N 型剑 杆织 机 ,根 据结 构 的需要 ,织 机 的筘座 脚 、 打 纬 动程 已经 确 定 。如 何 在 这 些 条件 一 定 的情 况下 ,通过 优 化 凸 轮 的型 面 曲线 ,来 实 现 较 大的 打 纬 力 以及 提 高 转速 减少 振 动 ,是我 们设 计 的重 点 。
圈 3
(2)拟 合误 差分 析 现 将原 摆 杆 波 浪 曲线 、最小 二 乘 拟 合 曲线 绘 制 在 同一 张 图上 ,见 (图 4)。
圈 2
2.3用最小二乘拟 合方法进行摆杆运动 曲线的拟合 (1)最小 二乘 拟合 方 法
关 于 最 小二 乘 拟 合 方 法 的计 算 过 程 , 因较 为 繁 复 ,本 文 不再 赘述 ,可参 见 数值 分析 》[2】。
现 利用 该种 方法 ,对 上述 带有 误差 的摆 杆运 动 规律 (原 始 曲线 )进 行处 理 ,得 到一 条 与 原 始 曲线 极 为 相 似 的最 小 二 乘 拟 合 曲 线 ,如 (图 3)。 由图 可 以看 到 :该 曲线 是一 条 连续 的 、光 滑 的 曲线 。其 中 :
凸轮优化设计解析

一.配气凸轮优化设计1.1配气凸轮结构形式及特点配气凸轮是决定配气机构工作性能的关键零件,如何设计和加工出具有合理型线的凸轮轴是整个配气系统设计中最为重要的问题。
对内燃机气门通过能力的要求,实际上就是对由凸轮外形所决定的气门升程规律的要求,气门开启迅速就能增大时面值,但这将导致气门机构运动件的加速度和惯性负荷增大,冲击、振动加剧、机构动力特性变差。
因此,对气门通过能力的要求与机构动力特性的要求间存在一定矛盾,应该观察所设计发动机的特点,如发动机工作转速、性能要求、配气机构刚度大小等,主要在凸轮外形设计中兼顾解决发动机配气凸轮外形的设计也就是对凸轮从动件运动规律的设计。
从动件升程规律的微小差异会引起加速度规律的很大变动,在确定从动件运动规律时,加速度运动规律最为重要,通常用其基本工作段运动规律来命名,一般有下面几种:1.1.1等加速凸轮等加速凸轮的特点是其加速度分布采取分段为常数的形式,其中又可分为两类,一类可称为“正负零型”,指其相应的挺柱加速度曲线为正—负—零:另一类可称“正零负型”,指其加速度曲线为正一零一负。
当不考虑配气机构的弹性变形时,对最大正负加速度值做一定限制且在最大升程、初速度相同的各种凸轮中,这种型式的凸轮所能达到的时面值最大。
等加速型凸轮常常适用于平稳性易保证,而充气性能较差的中低速柴油机中。
但就实际情况而言,配气机构并非完全刚性,等加速凸轮加速度曲线的间断性必然会影响机构工作平稳性,在高速内燃机中一般不采用等加速型凸轮[9]。
1.1.2组合多项式型组合多项式型凸轮的基本段为一分段函数,它由几个不同的表达式拼接而成。
通过调整各段所占角度及函数方程,获得不同斜率的加速度曲线。
组合多项式型凸轮时面值大,而且能够方便地控制加速度变化率及确保正、负加速段间的圆滑过渡,可以较好地协调发动机充气性能及配气机构工作平稳性的要求[7]。
由于凸轮从动件运动规律由若干函数组成,在各段间联结点处不易保证升程规律三阶以上导数的连续性,可能会影响配气机构工作的平稳性,组合多项式型凸轮主要应用在要求气门时面值大和较好动力性能的情形。
共轭凸轮打纬机构弹性动力学和有限元分析

pr v m n ・ oe e t
Ke y wor :Ro k n ha t;El si na i s;ADAM S;Fi t l me ds c igs f a tc dy m c nie ee nt
中图分 类号 : H1 2 2 0 4 . 1 文献 标识 码 : T 1 . 2 2 2 A
共轭凸轮打纬机构弹性动力学和有限元分析
滕 兵 何 勇 ( 东华大 学,上海 2 0 5 ) 0 0 1
T ea a s f o jg t gc m h n l eo n ai a y c u n
n b a ig- u c a im t ii lme ta d els i d n mis e t n - p me h ns wi f t ee h n e n n a t y a c c
w t rtiog n ai n at o l et h e a d, a e te aio te hoy o e - e e h h h s ra i t na p r cu m e tedm n s n o r h ssf h erf r hi i zo d d d f b期
20 0 6年 2月
文 章 编 号 :0 1 9 7 2 0 )2—0 3 1 0 —3 9 (0 6 0 0 9一O 2
机 械设 计 与制造
Ma hie v De i n & Ma u a t r c n r sg n fcue 一3 9一
适用于高速运动的凸轮机构从动件运动规律

适用于高速运动的凸轮机构从动件运动规律凸轮机构是常见的从动件,它利用凸轮的移动和定位来控制从动件的运动轨迹。
传统的凸轮机构可以在较低速度下实现良好的精度和定位能力,但是当要求高速节拍时,其节拍分辨率会受到限制,甚至出现扭曲。
为此,本文详细研究了高速运行时凸轮机构从动件运动规律,以便在此种情况下获得准确的定位精度和节拍分辨率。
1.对凸轮机构运动特性的研究首先,本文从理论上研究了凸轮机构的运动特性,该机构的形状是一个将偶合的凸轮圈板以浮动支承和滚动支承相互桥接的凸轮机构。
其动作过程可以分为三步:凸轮离合,凸轮移动以及凸轮定位。
其中,凸轮离合的目的是为了在偶合的凸轮圈板的表面形成有效的离合面,以实现凸轮间的连接;凸轮移动的目的是为了实现凸轮之间的位置变换,以实现从动件的移动;凸轮定位的目的是为了保证凸轮不滑动,也可以认为是为了实现从动件的节拍。
在凸轮机构运动特性的研究中,我们对凸轮机构的运动特性,以及其在不同节拍下的运动轨迹和运动规律进行了详细分析。
2.凸轮机构从动件运动轨迹分析接下来,我们详细研究凸轮机构从动件在高速运行时的运动规律。
研究发现,当从动件速度较低时,可通过改变凸轮离合力和移动距离来控制从动件的运动轨迹。
但是,当从动件运行速度加快时,凸轮离合力不变,而凸轮移动距离会因从动件节拍增加而减小,从而造成从动件运动轨迹的不规则性,从而影响从动件的定位精度和节拍分辨率。
3.凸轮机构从动件运动规律研究基于凸轮机构从动件运动轨迹的分析结果,本文研究了从动件在高速运行时的运动规律,从而获得良好的定位精度和节拍分辨率。
这其中主要有三个方面:(1)增加凸轮离合力,减小凸轮移动距离:凸轮离合力主要是指所需要的力量来将凸轮离合,凸轮移动距离则是指凸轮在离合状态下移动的总距离。
当凸轮离合力增加时,凸轮移动距离会减少,这将有助于保持凸轮的稳定位置,从而能够提高从动件的定位精度。
(2)增加凸轮圈板的硬度:凸轮圈板的硬度主要是指其偶合部分的硬度。
共轭凸轮打纬机构分析与优化

却 已引起各个 企 业 的 广泛 重 视 , 然 能 系 统完 整 虽
地 应用 虚拟产 品开 发技 术 的企 业 或研究 单位 现在 还 不是 很多 , 有 许 多 企业 开始 应 用 一 项 或数 项 但 单元 技术 并且 取得 了明显的效 益 。AD AMS是 目 前 世界 上应用 比较 广泛 的机械 系 统动力 学仿 真分
[ : ̄l高彩凤, 1 E 3, ] u 韩贤军. 服装企业买手模式[ ]北京I M. 中 国 纺织出 版社, o- o
特点 , 谨慎 地运 用这 种产 品开发 模式 。 Re e r h o h o c - v l p e te n o s a c n t e Pr du tDe e o m ntPa t r f Bu e o n Cl t n y rM dei o hi g Ent r ie e prs
Ab ta t sr c :Th o g n l s n h o c p f b y r n r c s f a p l g p o u t d v l p e t r u h a ay ig t ec n e to u e sa d p o e so p y i r d c— e eo m n n p t e n fb y r mo e,h a e re o i s r c l t i g e t r rs o a p y t i a e a c r i g t a t r so u e d t e p p r t i st n t u tc o h n n e p ie t p l h s m d c o d n o t er c n i o n i e o e i s r c i n n h w o a p y t i mo e I h n i i u ta e h h i o d t n a d g v s s m n t u to s o o t p l h s i d . n t e e d, t l s r t s t e l b y r p o u t d v l p e tm o e i e a l t x m p e u e r d c e e o m n d n d t i wih e a l .
浅析高速凸轮机构的动态设计.

浅析高速凸轮机构的动态设计论文关键词:高速凸轮机构动力学模型动力学仿真论文摘要:建立了高速凸轮机构的动力学模型及其运动方程式,对具有摆线运动规律的从动件进行了动态响应的分析,并对凸轮机构进行动力学仿真,分析了从动件作用在凸轮上的作用力,为设计人员设计凸轮机构提供了一定的设计依据。
0引言高速凸轮机构中,由于构件的惯性力较大,构件的弹性变形及在激振力作用下系统的振动不能忽视,一方面它使得从动系统输出端的运动规律与输入端的运动规律存在差异,需要适当修正输入端运动规律,使输出端运动规律符合设计要求;另一方面,约束反力一直处于变化状态,了解约束反力的变化规律可为工程技术人员设计轴承和构件尺寸提供设计数据。
1凸轮机构动力学模型的建立及其动力学方程式为了简化计算,通常将构件的连续分布质量看作是集中在一点或若干点的集中质量,用无质量的弹簧来表示构件的弹性,用无质量、无弹性的阻尼元件表示系统的阻尼,并忽略一些次要的影响因素,从而把凸轮机构简化为由若干无弹性的集中质量和无质量的弹簧以及阻尼元件组成的弹性系统。
图1为偏置尖底直动从动件盘形凸轮机构及其动力学模型。
滚子和凸轮轴因刚性大可不计其弹性变形。
弹性系统的运动微分方程为:中E为从动件材料弹性模量,A为从动件截面积,1,为从动件长度;在不考虑工作载荷对凸轮机构输出件运动规律的影响,并忽略阻尼和锁合弹簧的弹簧刚度的情况下,该弹性系统的运动方程式简化为:2凸轮机构运动学仿真利用Matlab语言对凸轮机构进行运动学仿真。
假设凸轮轴采用铸铁,滚子采用青铜材料,从动件采用45钢(E ----- 206GPa , p= 7850kg/m3,直径为20mm,长度为1 000 mm,则m=2. 46k, kf=6. 5 Xl0’N/m,忽略锁合弹簧的弹簧刚度和系统阻尼系数,得到系统固有频率为:由于当激振频率与系统固有频率之比大于等于0. 1时,成为高速凸轮,取激振频率为800rad/s.摆线运动规律的加速度曲线没有突变,理论上不存在冲击,故常用于高速凸轮机构,下面运用摆线运动规律来求解动态下从动件的实际运动规律。
共轭凸轮的设计.
对于直动推杆圆柱凸轮机构,可设想将此圆柱凸轮的外表面展开在平面上,则得到一个移动速度为V(V=Rω)的移动凸轮。利用反转法原理,给整个移动凸轮机构加上一公共线速度—V后,此时凸轮将静止不动,推杆在随其导轨反向移动和在导轨中按预期的运动规律往复移动的复合运动时,其尖顶(或滚子中心或推杆导路中心线与推杆平底的交点A)描出的轨迹即为凸轮的理论廓线。然后再用前述同样的方法就可求得移动凸轮的工作廓线。最后,将这样作出的移动凸轮图卷于以只为半径的圆柱体上,并将其上的曲线描在圆柱体的表面上,即为所求的圆柱凸轮的轮廓曲线。
第
2.1凸轮机构优点
只要适当地设计出凸轮的轮廓曲线,就可以使推杆得到各种预期的运动规律,而且机构简单紧凑。
2.2凸轮机构缺点
1)凸轮廓线与推杆之间为点、线接触,易磨损,所以凸轮机构多用在传力不大的场合。
2)凸轮轮廓精度要求较高,需用数控机床进行加工;
3)从动件的行程不能过大,否则会使凸轮变得笨重。
第
在普通消极式凸轮开口机构上,综框的下降是由凸轮积极控制的,但开口机构要增加承受吊综弹簧的弹性变形,织机的能耗增大。而综框的回升要依靠吊综弹簧的弹性势能,综框的回升效果受弹簧的初始变形量和弹性模量影响,因此综框的回升不稳定且弹簧要承受反复的拉伸变形,寿命较短,经常要调整、更换。特别是对于织阔幅厚重类织物,如牛仔布,采用吊综弹簧回综不甚适宜,必须采用共轭凸轮积极式开口机构。
4)将推杆尖点各位置点连成一光滑曲线,即为凸轮轮廓曲线。
对于偏置直动尖顶推杆盘形凸轮机构,推杆在反转运动中占据的各个位置为过基圆上各分点所作偏距圆的切线;而对于对心直动尖顶推杆盘形凸轮机构,可以认为是e= 0时的偏置凸轮机构,则需过基圆上各分点作过凸轮回转中心的径向线即可,其他设计方法基本相同。
剑杆织机共轭凸轮打纬机构介绍
剑杆织机共轭凸轮打纬机构介绍作者:孙庆军来源:《纺织报告》 2018年第1期摘要介绍共轭凸轮打纬机构的组成和运动原理,对摆杆的运动规律进行分析,通过优化设计凸轮的轮廓曲线来满足使用要求。
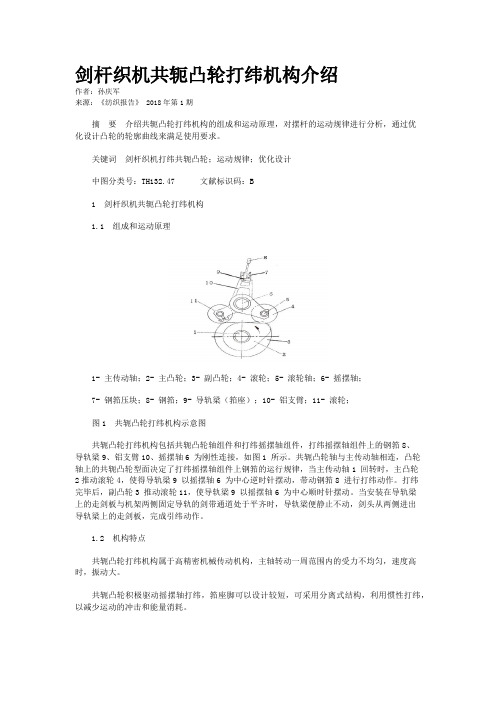
关键词剑杆织机打纬共轭凸轮;运动规律;优化设计中图分类号:TH132.47 文献标识码:B1 剑杆织机共轭凸轮打纬机构1.1 组成和运动原理1- 主传动轴;2- 主凸轮;3- 副凸轮;4- 滚轮;5- 滚轮轴;6- 摇摆轴;7- 钢筘压块;8- 钢筘;9- 导轨梁(筘座);10- 铝支臂;11- 滚轮;图1 共轭凸轮打纬机构示意图共轭凸轮打纬机构包括共轭凸轮轴组件和打纬摇摆轴组件,打纬摇摆轴组件上的钢筘8、导轨梁9、铝支臂10、摇摆轴6 为刚性连接,如图1 所示。
共轭凸轮轴与主传动轴相连,凸轮轴上的共轭凸轮型面决定了打纬摇摆轴组件上钢筘的运行规律,当主传动轴1 回转时,主凸轮2推动滚轮4,使得导轨梁9 以摇摆轴6 为中心逆时针摆动,带动钢筘8 进行打纬动作。
打纬完毕后,副凸轮3 推动滚轮11,使导轨梁9 以摇摆轴6 为中心顺时针摆动。
当安装在导轨梁上的走剑板与机架两侧固定导轨的剑带通道处于平齐时,导轨梁便静止不动,剑头从两侧进出导轨梁上的走剑板,完成引纬动作。
1.2 机构特点共轭凸轮打纬机构属于高精密机械传动机构,主轴转动一周范围内的受力不均匀,速度高时,振动大。
共轭凸轮积极驱动摇摆轴打纬,筘座脚可以设计较短,可采用分离式结构,利用惯性打纬,以减少运动的冲击和能量消耗。
打纬力的大小,以及打纬时间的长短,通过设计共轭凸轮的型面来实现,从而适应不同的织造工艺。
剑头进出织口完成引纬动作时,摇摆轴组件在后死心是静止不动的,利于织机转速的提高。
可以实现较宽幅织机引纬动作的完成,打纬摇摆轴组件在后死心的静止时间可以设计成较长的时间,一般静止角为220° ~255°之间,幅宽大时大一点,织机转速高时小一点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
根据上述要求,引入三角函数与直线交替组合的加速度规
律。它六段组成,衔接点为’l,2,3,4,5(如图1)其中∥
为筘座角加速度;庐为凸轮轴转角,庐。为筘座来回摆动一次
所对应的凸轮轴转角,p。为筘座最大摆角;^z和^1分别代表
.
2石
负、正加速度的最大绝对值;横坐标兄2 i妒由凸轮轴转角庐
into hydmulic Virtual prototype techniquo
Key words:SOlid Edge: Visual B越ic:par踟eterization; hydmulic
components;VinuaI p∞totype F逸5 Tab 0 Ref3
高速打纬共轭凸轮运动规律的设计分析
datab叠se base on∞肛d Edge to hyd憎ulic Vinual pmtOty辨t托hnique
LIANG Shu叠ng.yi-YIN Hui-jun
(Gu柚肛i Unjvc晤时oflkhnology·Gu卸gxj Liuzhou 545006·China)
in删uc鹤山e Abst憎ct:The anicIe
副凸轮压力角口m瓤副(弧度)曲线。表中%2 2垃善, ‰
^一2
%l=^l二等;夕。。为角速度的最大绝对值·
一I\Y和度 V
£套冷乏\ \V,,//::醒
、
,
、
,
\/
V
图2 c=4、6=O.01(左)与o=4、6=2(右)时位移、i蠛、加速度曲线
100
一Q.· ,
\V砖癜. ¨
o
%
\
Mห้องสมุดไป่ตู้
’
o
\/
‘
”
U
l
1.789
1.023
0.572
4
2
2.009
O.893
O.580
4
3
2 238 O.814
0.586
口一副
27.243 27.903 28.562 29.166
口。主
29.228 28.487 27.686 27.049
图3 c=6、6=3时位移、速度、加速度曲线
6
O.0l
1.4“
I.25l
O.545
200I.
f2】宋伟,吴建国.中文Visual B船ic 6.0高级编程【M】.北京:清华大学出 版社,1999.
【3】 李启炎,等.三维CAD设计及制图教程[M】…l二海:同济大学出版社,
2000.
The appI.曲“蛐of the 3D p|咖n“erized hydnuIic∞m呻nents
参考文献
【l】牧野洋.自动机械机构学.胡茂松译.北京:科学出版社.1980
【2】陈元甫.剑杆织机原理与使用.北京:中国纺织出版社.1994.
【3】华大年.机构分析与设计.北京:纺织工业出版社.1985.
,:≠∞t=辨|旃。■0+‘《懒趟潮4《渊:;崭;群辅“{“自#棒“Ⅳ}艘r耕。t。一一}
’f、一7f■#w、#~’
第五段:旯:垒坚型』知~竺』复 万方数据
矽:局
第六段:A:旦土知~氖
矽=鲁cos詈cA一孚2引+每
由边界条件可得吃和啊的表达式:
驴万嚣弩 九,2一力1 ,
c+26+l,
若已知∥o,给出工艺需要的吃,带入垃和^的表达式,
便可得到一个关于6、c的关系式,适当选取6、c数值,便可 设计出满足所需工艺要求的运动规律曲线。本文为了节省篇 幅,直接取值夕o=0.4189,‰=2.6180。主凸轮小半径50mm, 副凸轮大半径14lmm,摆杆长度1 lOmm,中心距205mm。图 2—4中字母分别代表的含义:l一位移曲线;2一速度曲线;3 一加速度曲线;4一主凸轮压力角口。。主(弧度)曲线,5一
刊名:
英文刊名: 年,卷(期):
机械设计 JOURNAL OF MACHINE DESIGN 2005,22(z1)
参考文献(3条) 1.牧野洋.胡茂松 自动机械机构学 1980 2.陈元甫 剑杆织机原理与使用 1994 3.华大年 机构分析与设计 1985
本文链接:/Periodical_jxsj2005z1050.aspx
metllod OfbuiIdjng 3D pammeterized
hydraulic componentS datab鹅e b笛cd on Solid Edge by Vis岫l B鹊ic.And it is
柚c腩ctcd met|lod to improve d嚣i驴ing emci∞cy for applying t11c 0echniq∞
用上述方法,根据已知的∥o和工艺参数JIz2,设计出的打 纬共轭凸轮运动规律曲线,在能够充分满足打纬工艺要求的前 提下,还可以通过对b、c的值进行适当地调解,来满足更多 的附加条件和工艺要求,使整个运动规律能够达到期望的效果 和更好的运动及机械性能,因此它可以广泛地应用到打纬共轭 凸轮机构的理论设计与反求研究当中。
‘
o
机械设计
第22卷增刊
性很强,使曲线的变化丰富灵活,具有很大的活动空问和适用 范围;③由图3可见,6、c的取值直接影响第一段和最后一 段加速度曲线的陡缓程度,从动力特性考虑,6+c的值也不宜 选取过人。
表1 b、c的不同取伍对应的各项特性参数
C
b
k
~I
p一
4
O.0l
I.595
1.27l
O.564
4
共轭凸轮打纬机构其推程和回程由主、副凸轮分别进行控 制,作用积极可靠,可按需要设计出筘座运动,改善引纬条件、 满足织造工艺。设计高速共轭凸轮打纬运动规律的基本要求 是:打纬动程及负加速度最大值应满足打纬工艺要求;打纬运 动过程中,筘座位移、速度、加速度的变化要光滑、平缓、连 续;正加速度及速度峰值应较小,跃度曲线连续无突变,为改 善高速凸轮动力特性,运动曲线起止端跃度也连续。
虚拟样机技术中,将提高液压元件三维CAD建模的速度,
大提高设计效率,节省人力物力,节约设计成本。
参考文献
图5生成的锥密封胶管接头螺纹接头
4 结束语
利用Visual BaSic对Solid Edge进行二次开发,扩充了 SoIid Edgc的用法,建立的三维参数化液压元件库应用于液压
万方数据
【l】彭颖红,等.Solid Edge Visual B孙ic开发入门[MJ.北京:科学出版社,
6
1
1.589
1.059
O.552
26653 27.120
28.948 28.51l
6
2
1.730
O.944
O 559
27.610
28.007
6
3
l 878
O.867
O.565
28.08l
27.498
2 结论
圈4 c=4、6-1时位移、速度、加速度及压力角曲线
分析:①由表l可见,若6不变,随着c的增大,~:、 ‰、口m-x主、口。蒯、扁“都随之减小,所以在能够满足~2的 前提下,c应取适当的较大值:若c不变,随着6的增大,厅,: 增大,铂减小,口m“主减小,口m“副增大,氏。增大,所以6 的取值需综合考虑;②由图2可见,6、c的取值对曲线调控 .彬g■l∞t叫!‘’二。脚《’‘'。。。"o,■#,?‘4,■‘一{划#’彭?Z¥二:Xo#二《02静#嘏■r■F※E删群■《j群 (上接第160页)
转化而来;独立变量b、c满足关系式2(b+c+1)=口。
屈一冷\炒怨醒S
\W:/
图l三角函数与亘线爻瞀绀笛盯加逯度运动规律
第一段:刎~等 口
矽=一鲁cos詈A+粤
二
二
二
第二段:旯:堡~生兰知
矽:啊
第三段:力:生坐知~垒型知
矽=掣cos昙c五一等2卅学
第四段:旯:鱼型氖~鱼三型知
矽=等≯cos≯一半2卅半
机械设计
JOURNAL 0F MACHINE DESIGN
99
高速打纬共轭凸轮运动规律的设计分析
李志杰,张家钰
(东华大学机械工程学院)
摘要:根据高速共轭凸轮打纬运动规律的特殊工艺要求,本文引入三角函数与直线交替组合的加速度运动规律,借 助于计算机软件编程对此规律进行了详细地分析和研究。
关键词:共轭凸轮;打纬机构;运动规律