高光谱图像分类
基于Transformer_的高光谱图像分类方法
75Internet Technology互联网+技术一、引言高光谱图像(hyperspetral image,HSI)是通过搭载在不同空间平台上的高光谱传感器,名为成像光谱仪,在电磁波谱的紫外、可见光、近红外和中红外区域,以数十至数百个连续且细分的光谱波段对目标区域同时成像而形成的图像。
早期的高光谱图像分类方法主要是通过人工提取高光谱图像中的特征,然后利用传统的机器学习方法对HSI 进行分类。
虽然这些方法在一定程度上能够对高光谱图像进行有效地识别和分类,但是需要人工构建特征。
此外,近年来高光谱图像数据呈现出海量增长的趋势,数据的特征维度也越来越高。
研究者们将深度学习技术应用到高光谱图像数据处理中。
这些基于深度学习的方法首先通过深度神经网络,如循环神经网络或卷积神经网络,来提取高光谱图像中的空间信息和光谱信息,然后利用分类器对图像进行分类。
虽然基于CNN 的主流方法能够有效提取高光谱特征,但是由于CNN 的结构,它只能提取局部特征,无法准确有效地捕捉全局特征。
近来,Transformer 在自然语言处理领域取得了巨大的成功,并被应用到计算机视觉任务中。
与基于CNN 的方法相比,Transformer 借助注意力基于Transformer 的高光谱图像分类方法机制,有效地兼顾了局部与全局特征。
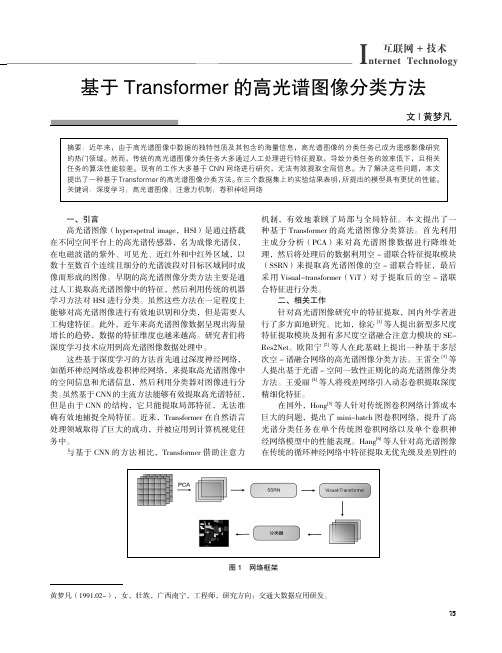
本文提出了一种基于Transformer 的高光谱图像分类算法。
首先利用主成分分析(PCA)来对高光谱图像数据进行降维处理,然后将处理后的数据利用空-谱联合特征提取模块(SSRN)来提取高光谱图像的空-谱联合特征,最后采用Visual-transformer(ViT)对于提取后的空-谱联合特征进行分类。
二、相关工作针对高光谱图像研究中的特征提取,国内外学者进行了多方面地研究。
比如,徐沁[1]等人提出新型多尺度特征提取模块及拥有多尺度空谱融合注意力模块的SE-Res2Net。
欧阳宁[2]等人在此基础上提出一种基于多层次空-谱融合网络的高光谱图像分类方法。
高光谱遥感图像分类方法综述

高光谱遥感图像分类方法综述张蓓(长安大学理学院陕西·西安710064)摘要高光谱遥感技术已经成为遥感技术的前沿领域,受到国内外的广泛关注。
而地物目标分类是高光谱数据处理的一个基本内容。
文中列举了一些高光谱遥感图像的分类方法,并对每种方法作简要介绍。
关键词高光谱遥感图像处理分类中图分类号:TP751文献标识码:A1高光谱遥感的简介高光谱遥感技术是上世纪80年代发展起来的一种新兴的遥感技术,高光谱遥感利用很多窄的电磁波段(通常波段的宽度小于10nm)从感兴趣的物体中获取图像数据,一般它是在电磁波谱的可见光,近红外,中红外和热红外波段范围内,设置了几十甚至几百个连续波段,其光谱分辨率可高达纳米(nm)数量级。
由于许多地表物质的吸收特性仅表现在20~40nm的光谱分辨率范围内,高光谱遥感图像可以识别在宽波段遥感中不可探测的物质。
现在,遥感应用领域也更加拓宽,涉及全球环境,土地利用,资源调查,自然灾害,以及星际探测等方面。
遥感图像分类一直是遥感研究领域的重要内容,如何解决多类别的图像的分类识别并满足一定的精度,是遥感图像研究中的一个关键问题,具有十分重要的意义。
2高光谱遥感图像的分类方法依据是否使用类别的先验知识,可分为监督分类和非监督分类。
2.1非监督分类非监督分类是指人们事先对分类过程不施加任何的先验知识,而仅凭遥感影像地物的光谱特征的分布规律,随其自然地进行盲目的分类;其分类的结果,只是对不同类别达到了区分,但并不确定类别的属性;其类属是通过事后对各类的光谱响应曲线进行分析,以及与实地调查数据相比较后确定的。
非监督分类主要的方法有K-均值聚类,ISODATA分类等。
K均值分类方法属于动态聚类法,其假定被用来表示样本空间的聚类中心的个数是预先知道的,这种假定本身在某种程度上限制了这一类方法的利用,它使聚类域中所有样本到聚类中心的距离平方和最小,这是在误差平方和准则的基础上得到的。
K均值分类方法简便易行。
高光谱图像分类方法研究

在高光谱图像分类中,通常采用卷积神经网络(CNN)来处理图像的空间信息 ,采用循环神经网络(RNN)来处理图像的光谱信息。通过将 CNN 和 RNN 进行结合,可以实现高光谱图像的自动分类。
基于深度学习的高光谱图像分类方法
总结词
深度学习是一种机器学习方法,通过构建多层神经网络来学习数据的内在规律和 特征。在高光谱图像分类中,基于深度学习的方法可以更有效地处理复杂的空间 信息和光谱信息。
02
高光谱图像集成了空间、光谱和 时间三个维度的信息,为地物识 别、环境监测、农业、军事等领 域提供了强有力的数据支持。
高光谱图像的特性
高光谱图像具有很高的数据维度 ,通常包含数百甚至数千个波段
。
每个像素包含完整的光谱曲线, 使得高光谱图像能够更精细地表 达地物的空间特征和光谱特征。
高光谱图像的空间分辨率和光谱 分辨率高,能够提供丰富的地物
则化项来实现最优分类。
THANKS
感谢观看
总结词
RF是一种无监督学习算法,通过构 建随机森林进行分类,可以处理多维 度的数据,对高维数据有很好的适应 性。
详细描述
RF通过构建多个决策树,并将它们的 预测结果进行投票来得到最终的分类 结果。在训练过程中,RF通过优化森 林的精度和多样性来实现最优分类。
基于NN的高光谱图像分类实例分析
总结词
NN是一种神经网络模型,通过模拟人脑神 经元的连接方式进行分类,可以处理复杂的 非线性问题。
总结词
SVM是一种监督学习算法,在分类问题 中表现出色,对高维数据有很好的适应 性,可以处理多类别的分类问题。
VS
详细描述
SVM通过找到一个最优的超平面,将不 同类别的样本分隔开,从而实现对高光谱 图像的分类。在训练过程中,SVM通过 最小化分类错误和最大化间隔来实现最优 分类。
高光谱图像分类方法综述

高光谱图像分类方法综述作者:雷湘琦来源:《科学与财富》2020年第24期摘要:过去数十年中,高光谱图像的研究与应用已经完成了从无到有、从差到优的跨越式发展。
在对其研究的众多方面中,高光谱图像分类已经成为了一个最热的研究主题。
研究表明空间光谱联合的分类方法可以取得比仅依赖光谱信息的逐像素分类方法更好的分类效果。
本文将对众多的空间光谱联合分类方法进行归类和分析。
首先介绍高光谱图像中相邻像素间的两类空间依赖性关系,因而可将现有的空谱联合分类方法分为依赖固定邻域和自适应邻域两类。
关键词:高光谱遥感;图像分类引言高光谱遥感(Hyperspectral Image,HSI)是20世纪以来遥感发展中十分突出的一个方面。
其通过搭载在不同空间平台上的成像光谱仪和非成像光谱仪等高光谱传感器,在一定波谱范围内,以数十甚至数百个连续且细分的光谱波段对目标区域同时成像。
与多光谱遥感影像相比,高光谱影像不仅获得地表图像信息,同时也获得光谱信息。
但是,随着参与运算波段数目的增加,会出现分类精度“先增后降”的现象,即Hughes现象。
本文将对空间光谱联合分类的方法进行着重介绍和总结,还将对从前经典述各类算法进行总结归纳,探讨一些其中具有代表性的方法的原理,对其进行总结,以期找出其中的联系。
1;;;; HSI图像空谱联合分类方法高光谱图像分类的目标是依据样本特征为图像中的每个像元赋予类别标签。
不同地物具有不同的光谱曲线,因此有许多利用光谱信息的方法被提出来用于高光谱图像分类,代表性方法有支持向量机(Support Vector Machine,SVM)、稀疏表示分类(Sparse Representation Classification,SRC)等。
此类逐像素的分类方法有计算简单、便于拓展等特点,然而此类方法并未考虑样本的空间关联性,这会导致两个主要问题:1)在较小的样本下难以对如此高维的数据学习出一个高精度的分类器,这即是著名的休斯现象;2)高维的光谱特征往往会导致分类模型中需要估计参量的增加,这会造成过拟合以至于模型的泛化性能难以提升。
标准分数降维的3D-CNN高光谱遥感图像分类
2021574高光谱遥感图像包含着数百个丰富的空间和光谱信息的波段,可以为对感兴趣的领域进行分类提供依据,因此在农业[1]、医学图像[2-3]、土地管理[4]、生态监测[5]和法医学[6]等领域有着广泛的应用。
随着高光谱成像技术的发展,光谱分辨率大大提升,同时也增加了高光谱图像的复杂度,容易造成所谓的Hughes现象[7]。
因此,在高光谱图像处理过程中,去除数据冗余的过程必不可少。
而降维可分为特征提取和特征选择两种方式。
特征提取用于寻找合适的映射,将高维特征空间转换为低维特征空间,如常见的主成分分析方法[8]、独立成分分析方法[9]等。
另一种是特征选择方法,特征选择是从原始集合中选择最具代表性的特征子集,可以保留原始数据的物理意义,因此应用最为广泛。
如Huang等人根据信息熵理论,量化了各波段的信息量,从而达到降维的目的[10]。
近年来,深度学习已经成功应用到语音识别[11]、自然语言处理[12]和图像识别[13]等领域并取得了显著进标准分数降维的3D-CNN高光谱遥感图像分类佘海龙,解山娟,邹静洁杭州师范大学遥感与地球科学研究院,杭州311121摘要:针对高光谱图像存在Hughes现象,以及空间和光谱特征利用效率低的问题,提出了一种结合标准分数降维和深度学习的高光谱图像分类算法。
利用标准分数对高光谱数据的波段质量进行评价以剔除高光谱遥感图像中的冗余波段,结合优化过的3D-CNN(3D Convolutional Neural Network)分类方法,通过使用大步距卷积层替代池化层,引入L2正则化、批量归一化(Batch Normalization,BN)、Dropout等一系列策略,在减少网络参数的同时有效防止过拟合现象。
通过Pavia Centre和Pavia University两个公开高光谱数据集的实验测试,该算法大幅度降低了网络模型的参数和计算量,取得了99.01%和95.99%的分类精度。
高光谱图像分类方法综述
DOI:10.13878/j.cnki.jnuist.2020.01.011张建伟1㊀陈允杰1高光谱图像分类方法综述作者简介:张建伟(1965—),男,教授,博士生导师.苏州大学数学系本科毕业,获武汉大学硕士学位,南京理工大学博士学位.1986年以来在南京信息工程大学工作34年,历任数学系教师㊁教研室主任㊁系副主任㊁系主任㊁滨江学院院长㊁科技处社科处处长㊁研究生院常务副院长,现任数学与统计学院院长.长期从事教学工作,完整讲授过20多门本科生㊁研究生课程,指导硕士博士生30多人,曾获校优秀教学质量奖㊁江苏省教学成果特等奖.主要从事计算数学㊁计算机应用方向的研究工作,主持国家自然科学基金项目3项㊁横向科研项目20余项,发表核心以上学术论文80多篇.E⁃mail:zhangjw@nuist.edu.cn收稿日期2019⁃07⁃01基金项目国家自然科学基金(61672293,61672291)1南京信息工程大学数学与统计学院,南京,210044摘要在过去数十年中,高光谱图像的研究与应用已经完成了从无到有㊁从差到优的跨越式发展.在对其研究的众多方面中,高光谱图像分类已经成为了一个最热的研究主题.研究表明空间光谱联合的分类方法可以取得比仅依赖光谱信息的逐像素分类方法更好的分类效果.本文将对众多的空间光谱联合分类方法进行归类和分析.首先介绍高光谱图像中相邻像素间的两类空间依赖性关系,因而可将现有的空谱联合分类方法分为依赖固定邻域和自适应邻域两类;此外,还可以依据是否同时利用两类依赖关系将现有方法进一步分为单依赖和双依赖两类.另外,还可以依据空谱信息融合的不同阶段将现有的分类方法划分为预处理方法㊁一体化方法及后处理方法三类.最后展示几种具有代表性的空间光谱联合分类方法在真实高光谱数据集上的分类结果.关键词高光谱图像;自适应邻域;预处理分类;后处理分类;空谱联合分类中图分类号P227文献标志码A0 引言㊀㊀高光谱图像(HyperspectralImage,HSI)是由搭载高光谱成像仪的航空航天飞行器捕捉到的三维立体图像,图像中的每个像素均含有上百个不同波段的反射信息,这使其适合于许多实际应用如军事目标检测㊁矿物勘探和农业生产等[1⁃4].高光谱图像分类已越来越成为其中的一个研究热点.高光谱图像分类的目标是依据样本特征为图像中的每个像元赋予类别标签[5⁃6].不同地物具有不同的光谱曲线,因此有许多利用光谱信息的方法被提出来用于高光谱图像分类,代表性方法有支持向量机(SupportVectorMachine,SVM)[7]㊁稀疏表示分类(SparseRepresen⁃tationClassification,SRC)[8]等.此类逐像素的分类方法有计算简单㊁便于拓展等特点,然而此类方法仅利用到了光谱维度的信息,并未考虑样本的空间关联性,即地物分布的空间连续性,这会导致两个主要问题:1)在较小的样本下难以对如此高维的数据学习出一个高精度的分类器,这即是著名的休斯现象[9⁃10];2)高维的光谱特征往往会导致分类模型中需估计参量的增加,这会造成过拟合以至于模型的泛化性能难以提升.另外,同一类地物受光照强弱㊁阴影等因素的影响,其㊀㊀㊀㊀光谱特征也不尽相同,因而不包含空间信息的逐像素分类方法难以取得令人满意的分类结果.如文献[11]所指出,HSI不应当仅仅被看作一系列像素的集合,而应当被看作有纹理结构的图像.它指的是样本间的空间关联性,可以看作是对光谱信息的一个补充,这也为增强和改进逐像素分类器的分类性能提供了方向.在过去的十年中,学者们提出了许多融合空间光谱信息的空谱联合分类方法[12⁃17],实验结果显示在融合空间信息后,分类精度及分类结果的鲁棒性均有很大提高,因此空谱联合分类方法已越来越成为高光谱图像分类的主流方法.本文将对空间光谱联合分类的方法进行着重介绍和总结,并为HSI分类研究的方向提出一些指引.主要安排如下:1)首先探讨HSI中相邻像素的空间依赖关系.空间依赖关系可以被简单分为像素特征间的空间依赖关系和像素类别间的空间依赖关系,并以此为基础进行模型的分类划分.2)通过不同的邻域划分方法和不同的加权邻域方法将现有方法分为基于固定邻域的方法和基于自适应邻域的方法两类.3)基于空谱融合阶段的不同将现有方法分为基于预处理的分类方法㊁一体化分类方法和基于后处理的分类方法三类.这三类方法可以很广泛地涵盖到现有的大多数方法,在这一部分本文还将对前述各类算法进行总结归纳,以期找出其中的联系.4)最后对现有的几大类分类方法分别进行归纳,探讨一些其中具有代表性的方法的原理,对其进行总结,最后通过实验来对其进行比较.1㊀基于空间依赖关系的HSI分类1 1㊀邻域间的空间依赖关系在自然影像中,常用的一个假设为地物分布是连续的,换句话说其地物分布应当服从某种特殊的结构.这种空间依赖关系可将模型分为以下两类:1)相邻像素的特征相关性:相邻像素在光谱特征上有较大概率是相似的.2)相邻像素的类别相关性:这些相似像素的类别标签应当是相同的.现有的空谱联合分类方法通常会利用上述假设中的一种或两种以融合空谱信息.为提取相邻像素信息,通常需要定义邻域,邻域即指的是为目标像素贡献空间特征所用的像素组成的区域.而依据这个区域的选择策略的不同,本文将HSI分类方法分为基于固定邻域的方法和基于自适应邻域的方法两类.1 2㊀固定和自适应邻域的方法1)基于固定邻域的方法.在此类方法中,对每一像素而言,与它相邻接的像素构成的邻域是固定的,一般取其方形邻域.现有的许多方法[18⁃28]都采用这种模式.一些预提取特征方法采用的邻域如小波和Gabor特征,经典的基于方形窗口的组合核方法[29⁃32].文献[33⁃34]采用了基于方形窗口的联合稀疏表示方法,文献[35]提出了一种基于多元逻辑回归的一般化的组合核方法,文献[36]提出了基于方形窗口的迭代式的图核方法.另一类具有代表性的固定邻域方法是基于一系列形态学滤波的形态学分析方法[37⁃38],它将通过一系列方形的滤波模板得到的形态学特征看作空间特征,进而进行HSI分类.除此之外,也有许多方法利用相邻像素的类别相关性来提取空间信息,代表性方法有基于马尔可夫随机场的方法,如文献[39⁃45]等.2)基于自适应邻域的方法.在这类方法中,所用到的空间邻域或空间邻域内不同像素的权重是依据图像纹理自适应选取的,这类策略下的大多数方法都会定义一个限定因子来调整邻域内样本的重要性或重新划分自适应邻域.前者的代表性方法有文献[46⁃49].文献[50⁃52]采取边缘检测算子调整邻域内样本的权重来进行保边性的分类.与文献[50]类似,卷积神经网络[53⁃54]也可以被用来为邻域中的每个像素自动化地学习出一个较好权重.文献[55⁃57]通过将空间局部像素上的差分转化为拉普拉斯矩阵进而对其优化来达到邻域自适应的效果.后者的代表性方法有基于超像素或目标分割的方法[58⁃66],它认为分割得到区域是整个图像的一个同质区域,因而将其看作一个整体进行HSI分类.文献[67⁃68]利用一系列的区域融合与分割算子来自适应地调整像素间的空间相关性.文献[69⁃70]通过衡量目标像素与其方形邻域内像素的相似性,设置相应的阈值来筛选出同质区域,进而通过联合表示分类等方法进行HSI分类.此外,还有一些方法利用相邻样本间类别相关性来获取自适应邻域,如文献[71⁃74]首先采用区域分割来得到目标邻域,再利用投票策略来确定区域标签.文献[75⁃76]利用地物分布的马尔可夫性以及09张建伟,等.高光谱图像分类方法综述.ZHANGJianwei,etal.Overviewofhyperspectralimageclassificationmethods.像素标签变化情况构建同质区域.通常情况下,一种方法仅会利用一类依赖关系来进行HSI分类,因为这样做简单易行且便于实现,现有的大多数方法均属于这一类别.当然也有一些方法会同时用到特征依赖和类别依赖两种关系.如文献[77⁃79]利用马尔可夫随机场和条件随机场来刻画像素间的联系.文献[80]通过已知样本来推测图像的纹理信息,进而借助此信息来优化类别平滑的正则项.文献[81⁃82]将传统的点对类别关系改进为基于邻域像素的点对类别关系.2㊀空谱信息不同融合阶段的HSI分类方法在介绍完空间依赖关系后,就需要考虑在什么阶段来融合空谱信息.本文将现有的方法分为基于预处理的分类方法㊁一体化分类方法和基于后处理的分类方法三类.每类方法的光谱融合阶段不同,如图1所示,这三个阶段贯穿着整个的分类过程.图1㊀3种不同空谱信息融合阶段的分类Fig 1㊀Classificationofthreedifferentspatialspectruminformationfusionstages2 1㊀基于预处理的分类方法基于预处理的分类是通过提取空间特征的方法来刻画空间信息的.在得到空间特征后再与光谱特征进行融合,最后采用不同的分类器进行分类.其分类过程通常包含两个阶段:1)空谱特征提取阶段;2)基于提取到的特征通过不同的分类器如SVM等进行分类的阶段.其中前一阶段是决定分类方法性能表现的关键[83].代表性的方法如基于形态学轮廓的空间特征提取方法,它采用一系列不同尺度的开闭运算的算子来提取图像的纹理信息[13⁃15].文献[19]采用空间平移不变的小波变换提取空谱信息,然后采用线性规划的SRC进行序列化.文献[20⁃22]还利用基于小波的软收缩去噪策略来提取小波特征.文献[23⁃28]利用高维的高斯包络谐波来提取Gabor特征.文献[18,84]利用修正的共生矩阵来得到空间特征.文献[85⁃86]采用经验模式分解和奇异谱分析来提取空间特征.还有一些空谱联合分类方法在核空间进行HSI分类,它通常是以组合核的形式来进行空谱信息的融合,这其中就包含基于固定邻域的方法[16]和基于自适应邻域的方法[59,87].2 2㊀一体化的分类方法此类方法同时用到空间和光谱信息来形成一个一体化的分类器,也就是说,它的空间特征提取和分类不会显式地分开.如文献[37]利用邻域内的纹理信息来改变传统逐像素的SVM方法的分类目标和约束条件.文献[33,35]通过训练样本来创造一个简单可用的字典,然后通过它来表示目标像素及其邻域内像素来添加平滑性约束,进而有效地利用了邻域内的空谱信息.文献[66⁃67]采用序列二进制分叉树在利用区域合并和修剪来对高光谱图像进行区域分割的同时达到分类目的.文献[52⁃53]利用基于CNN的策略,其中特征提取层和分类层使用同一个网络来进行特征提取与分类,而这两层网络的训练是一体化进行的.2 3㊀基于后处理的分类方法在此类方法中,通常会采用一个仅利用光谱信息的逐像素分类器来对HSI进行预分类,然后在依据像素间的空间依赖关系来对预分类结果进行正则化处理,主流的后处理方法有基于加权投票的方法㊁基于马尔可夫随机场的方法㊁基于图正则化的方法和随机漫步方法等.文献[39]首先采用多逻辑回归来做分类器对HSI进行预分类,然后利用一个刻画先验概率的马尔可夫正则化项进行后处理,通过对原先得到的后验概率进行正则化约束即得到新的分类结果图.文献[57]19学报(自然科学版),2020,12(1):89⁃100JournalofNanjingUniversityofInformationScienceandTechnology(NaturalScienceEdition),2020,12(1):89⁃100通过引入全变差正则项自适应地调整空间邻域中像素的权重来进行后处理.基于图正则化的方法如文献[42⁃43].基于投票的方法[72],采用SVM得到样本类别标签,然后再在局部邻域对标签进行投票来确定最终的样本标签.文献[48]基于随机漫步法来进行后分类,亦取得了较好的分类效果.文献[50]利用SVM来得到样本属于某个类别的概率,然后采用双边滤波的方法来进行HSI分类.文献[58]利用核协同表示来得到点对先验概率,然后采用基于自适应权重图的回归正则化来得到后验概率.3㊀对上述空间光谱分类方法的总结分析在基于预处理的分类方法中,原本的包含光谱特征的观测空间被转化为空间光谱特征联合构成的特征空间.若假设特征空间的维度并未发生变化,从概率的角度来说,越多的特征被利用就代表着空间刻画越准确.它从而影响两方面的内容,首先越多的特征被利用就意味着有希望学到更好的模型从而提升分类精度,其次特征之间的交叉信息更有利于减少错误决策.在一体化的分类方法中,模型建立和类别划分被统一成了一个整体,它的优化目标及其约束条件的求解是一个统一的过程,这种特点使得其分类过程较为简便,但可调节参数较少使得其进一步优化较为困难.在基于后处理的分类方法中,首先采用一个逐像素分类器进行HSI分类,然后再加入空间信息作为正则化约束来对此分类结果进行进一步优化.在贝叶斯理论中,这种正则化可以被看作是对空间依赖关系的某种先验信息进行建模,这样更有利于取得更好的分类结果.4㊀现有典型的分类策略总结4 1㊀基于结构滤波的方法基于结构滤波的HSI分类方法是高光谱图像处理领域最早被深入研究的方法之一.通常情况下,这种方法采取结构滤波来得到空间纹理特征,即给定一幅高光谱图像,可以通过空间结构滤波的形式来直接获取它的空间特征.一类最简单同时也是使用最广泛的提取空间信息的方法是利用方形邻域内的样本均值或者方差来代表目标像素处的空间特征[16].这种策略最早是在组合核或多核学习领域被提出并得到广泛使用的.这里的空间特征是被预提取的,然后再被用来构建空间光谱核.然而方形邻域的均值滤波显然并非是一个最佳的滤波模板,如文献[50]提出了基于双边滤波的方法来去除噪声同时保持细节.现在的一个趋势即是使用自适应的结构滤波来提取空间特征,如文献[88]提出的自适应多维度维纳滤波,文献[57]提出的基于自适应邻域的策略,文献[62]提出的基于超像素的区域分割策略等.4 2㊀基于形态学轮廓分析方法基于形态学滤波的形态学轮廓分析方法可以看作是一种特殊的结构滤波方法,它的滤波算子是一系列的形态学开闭操作,通常首先采取主成分分析[89]等方法进行降维,然后再在前几个主成分上采用一系列不同的滤波模板进行形态学开和闭操作,最后比较大小模板下的滤波结果来得到基于形态学分析的空间特征.文献[38]表明与均值滤波特征相比,形态学特征能更好地反映图像的纹理结构特征.4 3㊀基于稀疏表示的分类方法稀疏表示模型[33,90]的主要思想是假设现有的训练样本可以构成一个完备训练字典并且任意一个测试样本均可以被字典中的元素线性表出,然而将如此高维特征的样本完全表出是不合理的,那么稀疏表示方法注意到一个训练样本往往只属于某一类地物,即它只需当被训练样本中的同一类样本线性表示,即可得到一个稀疏性的约束.即使用尽量少的训练样本来表示某一测试样本,同时使得表示误差尽可能小.在求解目标函数后,稀疏表示方法取表示误差的最小的训练样本类别来作为此测试样本的类别.4 4㊀基于分割的HSI分类方法一些HSI分类方法利用图像分割作为一个后处理的步骤,即在空间光谱分类之后,如文献[9]通过提取和分类同质目标来进行HSI分类,文献[72]在SVM分类结果的基础上采用形态学的分水算法[91]来得到一个更加平滑的分类结果.不同的区域分割算法可以得到不同的HSI分类方法.与基于光谱特征的分类策略相比,这些策略可以极大地提高分类方法的分类精度.4 5㊀基于深度学习的HSI分类方法众所周知,神经网络和深度学习的算法通过模拟人脑的结构在图像分类㊁自然语言处理等领域取得了非凡的成果.与传统的浅层分类模型相比,深度29张建伟,等.高光谱图像分类方法综述.ZHANGJianwei,etal.Overviewofhyperspectralimageclassificationmethods.学习模型可以看作是一个包含多层结构的分类模型[92].基于深度学习的HSI分类方法可以被大致分为三个主要阶段[93]:1)数据输入阶段;2)深度神经网络构建阶段;3)分类阶段.卷积神经网络(Convo⁃lutionalNeuralNetwork,CNN)[94]是现今机器学习领域的一个热点方向,并且其在高光谱图像处理领域取得了非凡的成就.在传统的分类方法中,特征提取往往需要依赖由某种先验知识而设定的参数,而基于CNN的深度学习方法的模型参数可以通过自动化的训练过程来得到,这就意味着其具备自动提取数据特征的能力.文献[95]采取一个非监督的方法来构造基于堆叠自编码网络(StackedAutoencoder,SAE)的深度学习框架来提取HSI数据的高阶特征.文献[96]采用随机主成分分析(R⁃PCA)来一体化地提取空间和光谱特征.文献[97]采用一系列层叠的受限布尔兹曼机(RestrictedBoltzmannMachine,RBM)来构建深度置信网络,进而进行HSI分类.文献[98]提出基于差异化区域的CNN(DiverseRegionbasedCNN,DRCNN)方法,它在进行样本增强的同时融入了空间信息,从而达到了有效的保边效果.可以看出,这些网络均是由一系列的卷积和池化层组成,在经过每一个卷积层后,都有一个更深度的空间特征被提取,最后被用于HSI分类.5㊀实验结果与分析本节将设计实验来对仅采用光谱信息的分类方法和空谱联合的分类方法进行比较,从而说明空间信息的重要性.为了估计和比较不同分类空谱联合分类算法的优劣,本文分别在如下两个知名的数据集上进行实验:1)印第帕因(IndianPines):该数据由机载可见光/红外成像光谱仪(AirborneVisibleInfraredImagingSpectrometer,AVIRIS)在美国西北印第安获取的IndianPines测试集.整个图像是一幅包含16种地物的145ˑ145像素的图像,覆盖光谱波长从0 2到2 4μm的220个光谱波段.去除掉20个水汽吸收波段后,剩余的光谱波段为200个.为了验证本文方法在小样本上的分类性能,每类随机采取3%的样本作为训练样本,其余97%作为测试样本进行实验(详见表1)2)帕维亚大学(UniversityofPavia):该数据是由反射光学系统成像光谱仪(ReflectiveOpticsSystemImagingSpectrometer,ROSIS)在意大利市区获取的UnivirsityofPavia数据集.整个图像是一幅包含9种地物的610ˑ340像素的图像,覆盖光谱波长从0 43到0 86μm的115个光谱波段,在去除12个噪声波段后,剩余的光谱波段为103个.本文每类随机选取20个样本作为训练集,其余作为测试集.表1㊀不同数据集的训练与测试样本个数39学报(自然科学版),2020,12(1):89⁃100JournalofNanjingUniversityofInformationScienceandTechnology(NaturalScienceEdition),2020,12(1):89⁃100㊀㊀本文中采取以下几类具有代表性算法进行对比:1)仅利用光谱信息的SVM算法[7].2)组合核支持向量机分类方法(SVMbasedCompositeKernel,SVMCK)[16]:该方法采用方形窗口内的光谱均值或方差作为空间光谱特征,在提取空间信息的同时平滑了噪声.3)基于形态学滤波的形态学分析方法(ExtendedMorphologicalAttributeProfile,EMAP)[13]:该方法采用形态学分析的提取形态学轮廓来进行空间信息刻画,取得了较好的分类效果.4)基于超像素的空间特征提取方法(Superpixel⁃basedCompositeKernel,SPCK)[59]:该方法能够根据图像的纹理特征自适应地选择同质区域,作为一种基于自适应邻域方法的代表,它有效地保存了地物的边缘纹理.5)基于多逻辑回归的空间自适应全变差方法(SparseMultinomialLogisticRegression⁃SpatiallyadaptiveTotalVariation,SMLR⁃SpTV)[39]:该方法在贝叶斯框架下,利用满足TV一阶邻域系统的MRF正则项进行空间信息刻画,并将该先验约束于稀疏逻辑回归分类器求得的概率空间上,分类效果较好.6)联合稀疏表示方法(JointSRC,JSRC)[62]:此方法对目标像素的邻域内像素进行联合表示,有效地提取了空间信息.7)基于差异化区域的卷积神经网络(DiverseRegion⁃basedCNN,DRCNN)方法[98]:该方法采用以目标像素邻域内的不同的图像块作为CNN的输入,对输入数据进行了有效的增强,从而取得较好的分类效果.性能衡量指标使用总体准确率(OverallAccuracy,OA)㊁平均准确率(AverageAccuracy,AA)和Kappa系数.实验结果均为10次随机实验结果的平均值.若无特别说明,本文方法的默认分类器均采用SVM,以便进行比较.表2和表3分别是不同分类方法在印第帕因数据集和帕维亚大学数据集上的分类精度.从表中可以看出仅仅包含光谱特征的SVM方法分类精度较低,而空谱联合的分类方法均可以取得较好的分类结果.与基于方形邻域的SVMCK相比,基于超像素的组合核分类方法在两个数据集均能取得较高的分类精度.基于形态学滤波的EMAP方法可以取得比基于窗口均值或方差的SVMCK方法更好的分类效果,这也从侧面说明形态学分析提取的空间信息具表2㊀不同分类算法在IndianPines数据集上的分类准确率Table2㊀ClassificationaccuracyachievedusingdifferentclassificationalgorithmsonanIndianPinesdataset%ClassSVMSVMCKEMAPSMLR⁃SpTVSPCKJSRCDRCNN162.7849.4244.5156.5382.8831.9285.96276.2679.1484.4489.9890.5275.5088.38368.1987.6883.3083.5891.9472.3092.85455.6683.5265.9079.4279.2063.8983.31585.3796.6485.3285.0889.2786.6883.63692.6780.8094.7397.8097.4198.8192.54771.2530.0058.600.8077.602.0073.60895.3689.0797.2899.9798.6499.9898.35970.56071.05097.891.0570.001066.6783.2680.0683.4781.3984.7889.061177.6377.8086.6996.9291.2995.5097.231267.4585.1475.1786.0681.5186.5991.861398.3499.9094.1299.5199.4699.7698.581494.3791.5294.7798.4696.5199.5097.911545.5587.5167.2874.1377.1450.8293.391685.1193.7293.2657.0698.9193.2690.32OA/%78.0483.4285.5590.6590.4686.8493.07AA/%75.6375.9679.7874.3089.4871.4089.19κ0.74970.81230.83530.89310.89120.84510.921049张建伟,等.高光谱图像分类方法综述.ZHANGJianwei,etal.Overviewofhyperspectralimageclassificationmethods.表3㊀不同分类算法在UniversityofPavia数据集上的分类准确率Table3㊀ClassificationaccuracyachievedusingdifferentclassificationalgorithmsonUniversityofPaviadataset%ClassSVMSVMCKEMAPSMLR⁃SpTVSPCKJSRCDRCNN171.2997.1485.7984.7886.8382.1380.37275.7593.4886.8488.7385.9888.0387.63372.9776.6084.0283.5190.1295.4296.19491.8075.9492.3387.8596.1295.8776.99599.3395.2399.1399.7497.9899.6597.13671.3553.6982.8393.3078.4987.1794.44787.6073.5393.0399.7794.5493.7898.97867.2988.4773.8490.5485.8187.0095.10999.3199.1399.4331.4798.3798.8499.00OA/%76.4581.8386.1987.9387.0588.6288.50AA/%81.8883.6988.5984.4190.4891.9991.76κ0.69850.78590.82080.84350.83250.85230.8519图2㊀不同分类算法在IndianPines数据集上的分类结果Fig.2㊀ClassificationresultsbydifferentclassificationalgorithmsonanIndianPinesdataset有更强的判别特征.基于贝叶斯框架的全变差正则化方法亦取得了较高的分类精度,此方法利用满足TV一阶邻域系统的MRF正则项来刻画空间信息,可以有效提取纹理信息,在边缘处分类效果较好,是比较有代表性的基于后处理的一类MRF方法.SPCK方法采用超像素作为自适应邻域,是一类典型的基于自适应邻域的预处理分类方法,它通过超像素来对目标像素处的空间信息的提取过程进行约束,取得了较高的分类精度.JSRC是一类典型的基于方形邻域的一体式分类方法,它通过协同表示目标像素与其方形邻域内的像素来对目标像素的分类过程施加空间约束,可以看出此方法亦取得了较高的分类精度.DRCNN作为一种典型的基于CNN的深度学习方法,通过输入差异化的图像块来融入空间信息,它在两个数据集上的分类精度亦证明了此方法的有效性.图2和图3分别是不同分类方法在印第帕因数据集和帕维亚大学数据集上的分类结果,可以看出,在不包含空间特征的情况下,SVM方法的结果图中出现了非常多的噪点,HSI中地物连续分布的特点无法保持.在加入空间信息后,这个情况改善了许多.采用方形窗口来提取空间信息的SVMCK方法也达到了这一效果,但在类边缘处因为方形窗口容易包含两类信息,因此类边缘部分分叉较多.同时,JSRC亦通过方形窗口来约束空间信息,也存在此问题,SMLR⁃SpATV方法通过TV正则项以求达到较平滑的分类结果,因此也存在难以保持类边缘的问题.基于自适应邻域的SPCK方法和基于形态学滤波的59学报(自然科学版),2020,12(1):89⁃100JournalofNanjingUniversityofInformationScienceandTechnology(NaturalScienceEdition),2020,12(1):89⁃100。
高光谱图像分类
高光谱图像分类作者:黄何,康镇来源:《科技传播》 2019年第1期摘要近些年来,高光谱遥感技术迅速发展,同时也应用在了非常多的领域中。
而高光谱图像分类是其一个重要的方向。
但是高光谱图像成像机理复杂、波段繁多、数据量大等特点也向我们传统的图像分类方法提出了挑战。
文章综合介绍分析了几种监督分类方法和非监督分类方法。
监督分类方法主要介绍了平行多面体分类方法、最大似然分类方法、人工神经元分类方法;非监督分类方法主要介绍了K-mean s分类方法、ISDATA分类方法、谱聚类分类方法。
同时还综述了支持向量机分类方法、最小二乘支持向量机分类方法、决策树分类方法等新型分类方法。
关键词监督分类;非监督分类;最大似然分类;ISODATA分类;支持向量机分类中图分类号G2文献标识码A文章编号1674-67 08【2 01 9)226-0105-04高光谱遥感技术起源于20世纪80年代初,它是在多光谱遥感技术的基础上发展起来的。
经过数十年的发展,现在的高光谱遥感技术已经达到了一定的水平,在很多领域也得到了应用。
比如它在农业中的应用,其主要表现在快速、精准地获取各种环境信息,以及农作物生长情况。
在大气与环境应用上,在太阳光谱中,大气中的分子,如氧气、臭氧、二氧化碳、水蒸气等成分的反应十分强烈。
而因为大气成份生变而引起的光谱差异通过传统宽波遥感方法难以准确识别,而这种差异可通过窄波段的高光谱识别出来。
在城市环境与下垫面与环境特征的研究和应用,因为人们生活中的各种活动,使得城市环境与下垫面更为复杂。
而高光谱遥感技术的进步,能让人们依据光谱特征,更深入地去研究城市地物,而各种高光谱遥感器的出现,使得对城市的光谱的研究更加系统而全面,也为城市环境遥感分析及制图打下了基础。
在地质矿物勘探中的应用,区域地质制图和矿物勘查是高光谱技术主要的应用领域之一,也使得高光谱遥感技术的作用得到了有效的发挥,由于高光谱遥感比起宽波段遥感有诸多不同之处,因此在电磁谱上,每种岩石和矿物所显示出诊断性光谱特征各不相同,根据这一原理能清楚地识别出其中的矿物元素。
基于半监督学习的高光谱遥感图像分类算法研究
基于半监督学习的高光谱遥感图像分类算法研究高光谱遥感图像分类是遥感图像处理领域中一个重要的应用领域。
高光谱遥感图像是指采集到的图像具有连续的光谱信息,每个像素不是一个数值,而是一个包含多个波段信息的数组,这使得高光谱遥感图像能够提供比多光谱遥感图像更丰富的信息和更精细的分类结果。
目前,高光谱遥感图像分类算法研究主要集中于典型分类器和深度学习分类器两种方法。
传统典型分类器如最小距离分类器和支持向量机分类器等,需要区分像素之间的差异,以便能够将图像中的像素分类至不同的类别,属于有监督学习分类方法;深度学习分类器利用复杂的神经网络学习高光谱遥感图像中的特征,并能够提高分类效果,也属于有监督学习分类方法。
但这些方法需要大量标注样本,而这在实践中是极其困难的。
近年来,随着深度学习的出现,半监督学习的研究引起了广泛关注。
半监督学习是一种有监督学习和无监督学习的结合体,在保证分类精度的同时减少标注样本的数量,从而降低了成本。
基于半监督学习的高光谱遥感图像分类算法的主要目标是合理利用已分类的标注样本和未标注样本之间的关系来提高分类效果。
由于高光谱图像的数据量极大,很多未标注样本经常被忽略。
半监督学习通过在不影响分类准确性的前提下尽可能利用这些未标注样本,使得更多的数据成为了有用的信息,从而提高了分类准确性。
半监督学习方法主要分为两种:基于图算法和基于生成型模型。
基于图算法的半监督学习分类方法如图半监督学习(Graph-based Semi-Supervised Learning, GSSL)、拉普拉斯正则化半监督学习(Laplacian Regularized Semi-Supervised Learning, LRA)等。
基于生成型模型的半监督学习分类方法如生成式模型和鉴别式模型等。
GSSL是一种基于图的高光谱遥感图像分类算法,通过建立数据样本的相似性图,计算样本之间的相似关系。
在此基础上,利用半监督学习算法来整合标注数据和未标注数据,实现分类器的训练。
高光谱图像分类技术研究及其应用
高光谱图像分类技术研究及其应用高光谱图像分类技术是一种利用高光谱数据进行自动分类的方法。
随着遥感技术的发展和高光谱数据获取手段的日益完善,高光谱图像分类技术成为了遥感数据处理领域的热点研究方向。
本文将从高光谱图像的概念入手,介绍高光谱图像分类技术的基本原理和方法,并探讨其在农业、环境、地质勘探等领域的应用情况。
一、高光谱图像概念高光谱是指光谱带宽小于5纳米的可见和近红外波段范围内的光谱数据。
高光谱图像就是在一定范围内获取物体表面反射光谱数据的图像。
高光谱图像包含了物体表面的光谱信息,可以通过分析反射光谱数据来识别和分类不同物质。
与传统彩色图像相比,高光谱图像具有更高的信息量和更强的识别能力,因此在农业、环境、地质勘探等领域得到了广泛应用。
二、高光谱图像分类技术原理高光谱图像分类是一种利用计算机算法自动对高光谱图像进行分类的技术。
其基本原理是:将高光谱图像中的每一个像素点看作是一个高维度的光谱向量,通过对这些向量进行聚类或分类,得到图像中各个物体的空间分布和数量信息。
高光谱图像分类技术通常包含以下步骤:1、光谱预处理对高光谱图像的光谱数据进行预处理,包括光谱重采样、波段处理、噪声去除等操作,将光谱数据转化为更易于处理和分析的形式。
2、特征提取从高光谱图像中提取更有代表性的特征,用于分类器的训练和分类任务中。
常用的特征提取方法包括主成分分析(PCA)、线性判别分析(LDA)、小波变换等。
3、分类器设计设计一个分类器,将特征向量映射到类别标签上,从而实现高光谱图像分类。
常用的分类器包括支持向量机(SVM)、人工神经网络(ANN)、决策树等。
4、分类结果评估对分类结果进行评估,包括分类精度、召回率、准确率、F1值等指标。
三、高光谱图像分类技术应用高光谱图像分类技术具有广泛的应用前景,下面介绍其在农业、环境和地质勘探等领域的应用情况。
1、农业领域高光谱图像分类技术可以应用于农业领域,用于实现农作物的分类和监测。
第7-2章-高光谱遥感图像分类
3、最大似然监督分类
最大似然法是经典的分类方法,已在宽波段遥感图像分类
中普遍采用。它主要根据相似的光谱性质和属于某类的概率最
大的假设来指定每个像元的类别。MLC法最大优点是能快速指定
被分类像元到若干类之中的一类中去 。
从概率统计分析,要想判别某位置的向量属于哪一个类别,
判别函数要从条件概率 Pwi X i 1 , 2 , 3 , 来, m决定,
gi X PX wi Pwi
是一组理想的判别函数。判别规则为若
Pwi PX wi Pw j PX w j 则
X wi
在最大似然法的实际计算中,常采用经过对数变换的形式
gi
x
lnPwi
1 2
lnSi
1 2
x
M
i
T
S
1
x
M
i
23
光谱角值(Spectral Angle Value):像素或像素组之 间光谱角的大小为相似性量度
3
分类方法
分类执行方式:监督分类、非监督分类
分类模型或分类器:统计分类、模糊分类、邻域分 类、神经网络分类
参数分类和非参数分类:假定类的概率分布函数并 估计其分布参数
硬分类和软分类:像元属于一个类或多个类
第七章 高光谱遥感图像分类
1
基本概念
模式(pattern): 在多波段图像中,每个像元
都具有一组对应取值,称为像元模式
特征(feature): 在多波段图像中,每个波段
都可看作一个变量,成为特征变量
一个像元可以看成由n个特征组成的n维空间的一个点, 同类地物的像元形成n维空间的一个点群,差异明显的不 同地物会构成n为空间的若干个点群
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《机器学习》课程项目报告高光谱图像分类——基于CNN和ELM学院信息工程学院专业电子与通信工程学号 35学生姓名曹发贤同组学生陈惠明、陈涛硕士导师杨志景2016 年 11 月一、项目意义与价值高光谱遥感技术起源于 20 世纪 80年代初,是在多光谱遥感技术基础之上发展起来的[1]。
高光谱遥感能够通过成像光谱仪在可见光、近红外、短波红外、中红外等电磁波谱范围获取近似连续的光谱曲线,将表征地物几何位置关系的空间信息与表征地物属性特征的光谱信息有机地融合在了一起,使得提取地物的细节信息成为可能。
随着新型成像光谱仪的光谱分辨率的提高,人们对相关地物的光谱属性特征的了解也不断深入,许多隐藏在狭窄光谱范围内的地物特性逐渐被人们所发现,这些因素大大加速了遥感技术的发展,使高光谱遥感成为 21 世纪遥感技术领域重要的研究方向之一。
在将高光谱数据应用于各领域之前,必须进行必要的数据处理。
常用的数据处理技术方法包括:数据降维、目标检测、变化检测等。
其中,分类是遥感数据处理中比较重要的环节,分类结果不但直接提取了影像数据有效信息,可以直接运用于实际需求中,同时也是实现各种应用的前提,为后续应用提供有用的数据信息和技术支持,如为目标检测提供先验信息、为解混合提供端元信息等。
相对于多光谱遥感而言,由于高光谱遥感的波谱覆盖范围较宽,因此我们可以根据需要选择特定的波段来突显地物特征,从而能够精确地处理地物的光谱信[2]。
目前,许多国家开展大量的科研项目对高光谱遥感进行研究,研制出许多不同类型的成像光谱仪。
高光谱遥感正逐步从地面遥感发展到航空遥感和航天遥感,并在地图绘制、资源勘探、农作物监测、精细农业、海洋环境监测等领域发挥重要的作用。
高光谱遥感技术虽然是遥感领域的新技术,但是高光谱图像的分类一直制约着高光谱遥感的应用[3,4],因此对其进行研究显得尤为重要。
高光谱遥感图像较高的光谱分辨率给传统的图像分类识别算法提出严峻的挑战。
波段维数的增加不仅加重了数据的存储与传输的负担,同时也加剧了数据处理过程的复杂性,并且由于波段与波段间存在着大量的冗余信息,从而使得传统图像分类算法并不适用于高光谱遥感图像的分类。
传统的分类方法往往需要很多数目的已知类别的训练样本,从而导致计算量大,时间复杂度高。
另外,如果训练样本的数目较少,采用传统分类算法进行分类时分类精度往往是很低的,因此提高分类精度并减少运算量成为高光谱领域的热点问题。
高光谱遥感图像的波段数目多,并且波段与波段间存在着很大的相关性,因此在进行遥感图像的处理(例如分类)之前通常需要进行降维预处理,这样做不仅可以降低数据空间的维数,减少冗余信息,而且还有利于人工图像解译和后续分类处理和地物识别,从而为解决高光谱遥感分类的难点提供了方便[5]。
二、高光谱图像分类的发展与现状高光谱图像分类作为高光谱图像的基础研究,一直是高光谱图像重要的信息获取手段,它的主要目标是根据待测地物的空间几何信息与光谱信息将图像中的每个像素划分为不同的类别。
高光谱图像分类按照是否有已知类别的训练样本的参与,高光谱图像的分类方式分为监督分类与非监督分类[6]。
在遥感图像自动分类中,传统的基于数理统计的分类方法,主要包括最小距离分类、最大似然分类、波谱角分类、混合距离法分类等,主要依赖地物的光谱属性,基于单个像元进行分类。
统计模式识别方法本身的不足:1、最大似然法计算强度大,且要求数据服从正态分布2、K-means聚类分类精度低,分类精度依赖于初始聚类中心3、最小距离法没有考虑各类别的协方差矩阵,对训练样本数目要求低近年来对于神经网络分类方法的研究相当活跃。
它区别于传统的分类方法:在处理模式分类问题时,并不基于某个假定的概率分布,在无监督分类中,从特征空间到模式空间的映射是通过网络自组织完成的。
在监督分类中,网络通过对训练样本的学习,获得权值,形成分类器,且具备容错性。
人工神经网络(ANN)分类方法一般可以获得更高精度的分类结果,因此ANN方法在遥感分类中被广泛应用,特别是对于复杂类型的地物类型分类,ANN方法显示了其优越性。
专家系统分类法也在遥感分类取得了一定的应用。
专家系统是模拟人类逻辑思维的智能系统,将其应用于遥感分类最大的优点就是可以充分利用更多的辅助分类数据。
不过由于专家系统知识库难以建立,影响了它的进一步发展。
支持向量机(SVM)具有严格的理论基础,能较好地解决小样本、非线性、高维数等问题,被成功地应用到多光谱、高光谱遥感图像分类领域。
对于高光谱数据而言,由于波段多、数据量大、数据不确定性等,易受Hughes现象(即训练样本固定时,分类精度随特征维数的增加而下降)影响。
而样本的获取在高光谱分类中往往是一项比较困难的工作,特别是采用高维特征向量时要求每类的样本数都要比特征维数高,因此在高维信息处理中的精度与效率和高光谱遥感信息精细光谱与大数据量之间仍然存在着极大的矛盾。
三、卷积神经网络理论基础卷积神经网络是人工神经网络的一种,它的权值共享网络结构使之更类似于生物神经网络,降低了网络模型的复杂度,减少的权值的数量以节约训练和测试的计算时间。
该优点在网络的输入是多维图像时表现得更加明显,使图像可以直接作为网络的输入,避免了传统识别算法中复杂的特征提取和数据重建过程。
卷积神经网络是为识别二维数据而专门设计的一个多层感知机,其网络对平移、比例变化和倾斜等具有高度不变性[7]。
在CNN中,图像的一小部分(局部感受区域)作为层级结构的最低层的输入,信息再依次传输到不同的层,每层通过一个数字滤波器去获得观测数据的最显着的特征。
这个方法能够获取对平移、缩放和旋转不变的观测数据的显着特征,因为图像的局部感受区域允许神经元或者处理单元可以访问到最基础的特征,例如定向边缘或者角点。
卷积神经网络是一个多层的神经网络,每层由多个二维平面组成,每个平面又由多个独立的神经元组成。
图2为卷积神经网络的整体结构图。
一般地,C层(卷积层)为特征提取层,每个神经元的输入与前一层的局部感受野相连,并提取该局部的特征,一旦该局部特征被提取后,它与其他特征间的位置关系也随之确定下来;S层(下采样层)是特征映射层,网络的每个计算层由多个特征映射组成,每个特征映射为一个平面,平面上所有神经元的权值相等。
特征映射结构采用sigmoid函数等映射函数作为卷积网络的激活函数,使得特征映射具有位移不变性。
此外,由于一个映射面上的神经元共享权值,因而减少了网络自由参数的个数,降低了网络参数选择的复杂度。
卷积神经网络中的每一个特征提取层(C-层)都紧跟着一个用来求局部平均与二次提取的计算层(S-层),这种特有的两次特征提取结构使网络在识别时对输入样本有较高的畸变容忍能力。
卷积神经网络采用有监督学习的方式进行训练,即任何一个训练样本的类别是已知的,训练样本在空间中的分布不再是依据其自然分布倾向来划分,而是根据同类样本和不同类样本中的空间关系进行划分,这需要不断调整网络模型的参数用以划分样本空间的分类边界的位置,是一个耗时且复杂的学习训练过程[8]。
神经网络在进行训练时,所有的网络权值都用一些不同的小随机数进行初始化,这些小的随机数能偶保证网络不会因为权值过大而进入饱和状态,导致训练失败。
神经网络训练算法包括4个主要部分:(1)样本集中取出样本(X,yp )并将其输入网络,X代表图像数组,yp代表其类别;(2)计算此次输入相应的实际输出O p ,这是一个前向传播的过程;(3)用一个指定的损失函数计算出实际输出O p与理想输出Y p的误差;(4)按极小化误差的方法反向传播调整网络权值。
四、极限学习机极限学习机(extreme learning machine)ELM是一种简单易用、有效的单隐层前馈神经网络SLFNs学习算法。
2004年由南洋理工大学黄广斌副教授提出。
传统的神经网络学习算法(如BP算法)需要人为设置大量的网络训练参数,并且很容易产生局部最优解。
极限学习机只需要设置网络的隐层节点个数,在算法执行过程中不需要调整网络的输入权值以及隐元的偏置,并且产生唯一的最优解,因此具有学习速度快且泛化性能好的优点。
极限学习机的网络训练模型采用前向单隐层结构。
设,,m M n分别为网络输入层、隐含层和输出层的节点数,()g x是隐层神经元的激活函数,i b 为阈值。
设有N 个不同样本(),i i x t ,1i N ≤≤ ,其中[][]1212,,...,,,,...,T Tm n i i i im i i i in x x x x R t t t t R =∈=∈ ,则极限学习机的网络训练模型如图1所示。
图1 极限学习机的网络训练模型极限学习机的网络模型可用数学表达式表示如下:()1,1,2,...,Mi ii i j i g x b o j N βω=+==∑式中,[]12,,...,i i i mi ωωωω= 表示连接网络输入层节点与第i 个隐层节点的输入权值向量;[]12,,...,Ti i i in ββββ= 表示连接第i 个隐层节点与网络输出层节点的输出权值向量;[]12,,...,Ti i i in o o o o = 表示网络输出值。
极限学习机的代价函数E 可表示为()1,Nj j j E S o t β==-∑式中,(),,1,2,...,i i s b i M ω== ,包含了网络输入权值及隐层节点阈值。
Huang 等指出极限学习机的悬链目标就是寻求最优的S ,β,使得网络输出值与对应实际值误差最小,即()()min ,E S β 。
()()min ,E S β可进一步写为()()()111,,min ,min ,...,,,...,,,...,i i M M N b E S H b b x x T ωββωωβ=-式中,H 表示网络关于样本的隐层输出矩阵,β表示输出权值矩阵,T 表示样本集的目标值矩阵,H ,β,T 分别定义如下:()()()()()111111111,...,,,...,,,...,M M M M N N m N M N M g x b g x b H b b x x g x b g x b ωωωωωω⨯++⎡⎤⎢⎥=⎢⎥⎢⎥++⎣⎦ 11,T T T T M N M N N Nt T t βββ⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦极限学习机的网络训练过程可归结为一个非线性优化问题。
当网络隐层节点的激活函数无限可微时,网络的输入权值和隐层节点阈值可随机赋值,此时矩阵H 为一常数矩阵,极限学习机的学习过程可等价为求取线性系统H T β= 最小范数的最小二乘解ˆβ ,其计算式为ˆH T β+= 式中H +时矩阵H 的MP 广义逆。
五、 具体实现及主要代码1、训练的样本及其样本图2、原图及进行分类后的图和各个高光谱数据集每一类的分类精度The result of Pavia UniversityThe result of Pavia CenterThe result of Salinas3、主要代码The main code of Pavia University of Matlab%% Convolution Neural Network And Extrem Learning Machine%%Test 1 for PaviaUniversity%% STEP 1: InitializecnnConfig=config();[theta, meta] = cnnInitParams(cnnConfig);n_class = {}.dimension;load PaviaU;load PaviaU_gt;[images, labels, indexs,samimage] = loadtrain(paviaU, paviaU_gt);d = {1}.dimension;images = reshape(images,d(1),d(2),d(3),[]);%% STEP 2: Train (The Cnn And Elm)= 1;= 30;= ;newtheta = minFuncSGD(@(x,y,z)cnnCost(x,y,z,cnnConfig,meta),theta,images,labels,options);K = cnnExtract(newtheta,images,cnnConfig,meta); [TrainingTime,TrainingAccuracy,InputWeight,BiasofHiddenNeurons, OutputWeight,NumberofOutputNeurons] =elmtrain(K,labels' ,1, 900); %% STEP 3: Test[testImages, testLabels, testIndexs] = loadtest(paviaU,paviaU_gt);testImages = reshape(testImages,d(1),d(2),d(3),[]);[row, col] = size(paviaU_gt);testK = cnnExtract(newtheta,testImages,cnnConfig,meta); [TestingTime, TestingAccuracy,testoutputlabel,actualoutputs] = elmpredict(testK,testLabels',testIndexs,1,InputWeight,BiasofHid denNeurons,OutputWeight,NumberofOutputNeurons,row,col); predimage1=zeros(row,col);predimage1(testIndexs)=testoutputlabel;figure,imagesc(predimage1);axis off;[OA,kappa,AA,CA]= calcError(testLabels, predimage1(testIndexs), 1:n_class);fprintf('cnn+elm Overall Accuracy is %f\n',OA);fprintf('cnn+elm Average Accuracy is %f\n',AA);fprintf('cnn+elm CA Acuuyracy is %f\n',CA);fprintf('cnn+elm kappa is %f\n',kappa);figure,imagesc(paviaU_gt);axis off;The main code of Pavia Center of Matlab%% Convolution Neural Network And Extrem Learning Machine%%Test 2 for Pavia centercnnConfig = config3();[theta, meta] = cnnInitParams(cnnConfig);n_class = {}.dimension;load Pavia;load Pavia_gt;[images, labels, indexs] = loadtrain3(pavia,pavia_gt);d = {1}.dimension;images = reshape(images,d(1),d(2),d(3),[]);%% STEP 2: Train (The Cnn And Elm)= 1;= 25;= ;newtheta = minFuncSGD(@(x,y,z)cnnCost(x,y,z,cnnConfig,meta),theta,images,labels,options);K = cnnExtract(newtheta,images,cnnConfig,meta); [TrainingTime,TrainingAccuracy,InputWeight,BiasofHiddenNeurons, OutputWeight,NumberofOutputNeurons] =elmtrain(K,labels' ,1, 850); %% STEP 3: Test[testImages, testLabels, testIndexs] = loadtest3(pavia, pavia_gt); testImages = reshape(testImages,d(1),d(2),d(3),[]);[row, col] = size(pavia_gt);testK = cnnExtract(newtheta,testImages,cnnConfig,meta);[TestingTime, TestingAccuracy,testoutputlabel] =elmpredict(testK,testLabels',1,InputWeight,BiasofHiddenNeurons, OutputWeight,NumberofOutputNeurons,row,col);predimage1=zeros(row,col);predimage1(testIndexs)=testoutputlabel;figure,imagesc(predimage1);axis off[OA,kappa,AA,CA]= calcError(testLabels, predimage1(testIndexs), 1:n_class);fprintf('cnn+elm Overall Accuracy is %f\n',OA);fprintf('cnn+elm Average Accuracy is %f\n',AA);fprintf('cnn+elm CA Acuuyracy is %f\n',CA);fprintf('cnn+elm kappa is %f\n',kappa);figure,imagesc(pavia_gt);axis offThe main code of Salinas of Matlab%% Convolution Neural Network And Extrem Learning Machine%%Test 1 for Salinas%% STEP 1: InitializecnnConfig=config();[theta, meta] = cnnInitParams(cnnConfig);n_class = {}.dimension;load Salinas_corrected;load Salinas_gt;[images, labels, indexs,samimage] = loadtrain(salinas_corrected, salinas_gt);d = {1}.dimension;images = reshape(images,d(1),d(2),d(3),[]);%% STEP 2: Train (The Cnn And Elm)= 1;= 30;= ;newtheta = minFuncSGD(@(x,y,z)cnnCost(x,y,z,cnnConfig,meta),theta,images,labels,options);K = cnnExtract(newtheta,images,cnnConfig,meta);[TrainingTime,TrainingAccuracy,InputWeight,BiasofHiddenNeurons, OutputWeight,NumberofOutputNeurons] =elmtrain(K,labels' ,1, 2300);%% STEP 3: Test[testImages, testLabels, testIndexs] =loadtest(salinas_corrected,salinas_gt);testImages = reshape(testImages,d(1),d(2),d(3),[]);[row, col] = size(salinas_gt);testK = cnnExtract(newtheta,testImages,cnnConfig,meta);[TestingTime, TestingAccuracy,testoutputlabel,actualoutputs] = elmpredict(testK,testLabels',testIndexs,1,InputWeight,BiasofHid denNeurons,OutputWeight,NumberofOutputNeurons,row,col); predimage1=zeros(row,col);predimage1(testIndexs)=testoutputlabel;figure,imagesc(predimage1);axis off;[OA,kappa,AA,CA]= calcError(testLabels, predimage1(testIndexs), 1:n_class);fprintf('cnn+elm Overall Accuracy is %f\n',OA);fprintf('cnn+elm Average Accuracy is %f\n',AA);fprintf('cnn+elm CA Acuuyracy is %f\n',CA);fprintf('cnn+elm kappa is %f\n',kappa);figure,imagesc(salinas_gt);axis off;六、参考文献[1] 童庆禧,张兵,郑兰芬.高光谱遥感原理.技术与应用[M].北京:高等教育出版社, 2006[2] ,C. I. Variable-Band Selection for Feature Characterization in Hyperspectral Signatures [J].IEEE Transanctions on Geoscience and Remote Sensing, 2007, 45(9): 2979-2992[3] Q. Du, C. I. mixture analysis-based compression for hyperspectral image analysis [J]. IEEE Transanctions on Geoscience and Remote Sensing, 2004, 42(4): 875-891[4] , of a 3-D hyperspectral instrument for skin imaging applications [J].IEEE Transanctions on Instrumentation and Measurement, 2009, 58(3): 631-638[5] J. Li, J. M. Bioucas, A. hyperspectral image segmentation using subspace multinomial logistic regression and markov random fields [J]. IEEE Transanctions on Geoscience and Remote Sensing, 2012, 50(3): 809-823[6] P. E. Lehner, L. Adelman, R. J. Distasio. Confirmation bias in the analysis of remote sensing data [J]. IEEE Transactions on Systems, Man and Cybernetics, 2009, 39(1):218-226.[7] Bouvrie J. Notes on Convolutional Neural Networks[J]. Neural Nets, 2006.[8] Ren S, He K, Girshick R, et al. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks.[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2016:1-1.。