RBF神经网Simulink模型设计 神经网络控制课件(第三版)
合集下载
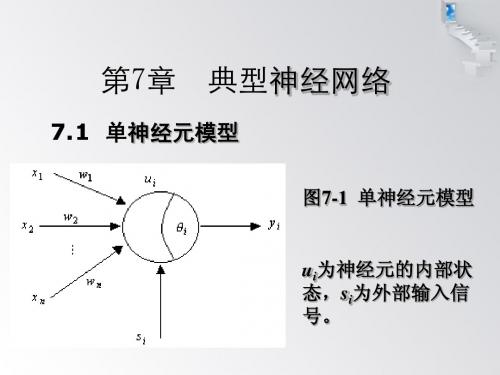
智能控制(第三版)chap7-典型神经网络2
根据前面网络结构知:x1=u(k).
武汉科技大学 信息科学与工程学院
18
7.2.4 BP网络的优缺点
BP网络的优点为: ①可以逼近任意的非线性映射关系; ②是全局逼近算法,具有较强的泛化能力。 ③具有较好的容错性。 BP网络的主要缺点为: ①收敛速度慢;
②容易陷入局部极小值;
③难以确定隐层及隐层节点的数目。 武汉科技大学 信息科学与工程学院
2
武汉科技大学 信息科学与工程学院
常用的神经元非线性特性有以下3种: (1)阈值型
1 f ( Neti ) 0 Neti 0 Neti 0
图7-2 阈值型函数 武汉科技大学 信息科学与工程学院
3
(2)分段线性型
0 f ( Neti ) kNeti f max Neti Neti 0 Neti 0 Neti Netil Neti Netil
出层;
(2)层与层之间采用全互连方式,同一层神经元之间 不连接; (3)权值通过δ 学习算法进行调节; (4)神经元激活函数为S函数;
(5)学习算法由正向传播和反向传播组成;
(6)层与层的连接是单向的,信息的传播是双向的。
武汉科技大学 信息科学与工程学院
7
7.2.2 BP网络结构
包括一个隐含层的BP网络结构如下图,图中i为输
使用高斯函数作为激活函数,网络具有唯一最佳逼
近的特性,无局部极小。
武汉科技大学 信息科学与工程学院
24
7.3.1 RBF网络结构与算法
多输入单输出的RBF神经网络结构如图7-13所示。
图7-13 RBF网络结构 武汉科技大学 信息科学与工程学院
25
在RBF神经网络中,x=[x1 x2 … xn]T为网络输入, hj为隐含层第 j个神经元的输出,即
BP神经网络Simulink模型设计 神经网络控制课件(第三版)
第一个值没完全显示
第一个值完全显示
隐层阈值 10
BP神经网络Simulink模型设计
Simulink模型仿真
分别点击 网络输出层结构
11
BP神经网络Simulink模型设计
Simulink模型仿真
第一个值没完全显示
第一个值完全显示
输出层权值 12
BP神经网络Simulink模型设计
Simulink模型仿真
例 2-11-2MS BP神经网络 Simulink模型设计
1
BP神经网络Simulink模型设计
应用函数 Gensim( ) : 将例2-5-3M BP网络生成Simulink模型的网络
2
BP神经网络Simulink模型设计
Matlab程序:ms2b2.m
3
BP神经网络Simulink模型设计
输出层阈值 13
BP神经网络Simulink模型设计
思考与练习
画出设计的BP网络的结构
14
结束
15
Simulink模型仿真
点击
6
BP神经网络Simulink模型设计
Simulink模型仿真
点击
网络隐层结构
7
BP神经网络Simulink模型设计
Simulink模型仿真
分别点击
8
BP神经网络Simulink模型设计
Simulink模型仿真
隐层权值 9
BP神经网络Simulink模型设计
Simulink模型仿真
《Simulink与控制系统仿真(第3版)》的课件 线性系统状态空间分析和非线性系统分析

通过本章,读者能了解非线性系统的发展概况、非线性 系统的数学描述和特性、非线性系统的研究方法和特点 ,掌握非线性系统分析和设计的基本概念和方法以及利 用MATLAB/Simulink对非线性系统进行分析。
11.2 非线性系统概述
含有非线性元件或环节的系统称为非线性系统。非线性特性包括 许多类型,典型的静态非线性特性包括死区非线性、饱和非线性、 间隙非线性和继电非线性。
采用MATLAB绘制相轨迹图
绘制相轨迹图的实质是求解微分方程的解。求解微分方程数 值解的算法有多种,MATLAB提供了求解微分方程的函数组, 常用的有ode45,它采用的计算方法是变步长的龙格-库塔4/5 阶算法。 ode45()常用的调用格式如下: [t, y]=ode45(odefun, tspan, y0) 在用户自己编写的MATLAB函数中既可以描述线性系统特性, 也可以描述非线性系统特性。
Relay:继电非线性; Saturation:饱和非线性; Saturation Dynamic:动态饱和非 线性;
Wrap To Zero:环零非线性。
11.3 相平面法
应用相平面法分析一阶尤其是二阶非线性控制系统,弄清非线性系统的稳定 性、稳定域等基本属性以及解释极限环等特殊现象,具有非常直观形象的效 果。 由于绘制二维以上的相轨迹十分困难,因此相平面法对于二阶以上的系统几 乎无能为力,这是相平面法的局限。
11.2.3 Simulink中的非线性模块
Backlash:间隙非线性; Coulomb&Viscous Friction:库仑 和黏度摩擦非线性;
Dead Zone:死区非线性; Dead Zone Dynamic:动态死区 非线性;
Hit Crossing:冲击非线性; Quantizer:量化非线性; Rate Limiter:比例限制非线性; Rate Limiter Dynamic:动态比例 限制非线性;
11.2 非线性系统概述
含有非线性元件或环节的系统称为非线性系统。非线性特性包括 许多类型,典型的静态非线性特性包括死区非线性、饱和非线性、 间隙非线性和继电非线性。
采用MATLAB绘制相轨迹图
绘制相轨迹图的实质是求解微分方程的解。求解微分方程数 值解的算法有多种,MATLAB提供了求解微分方程的函数组, 常用的有ode45,它采用的计算方法是变步长的龙格-库塔4/5 阶算法。 ode45()常用的调用格式如下: [t, y]=ode45(odefun, tspan, y0) 在用户自己编写的MATLAB函数中既可以描述线性系统特性, 也可以描述非线性系统特性。
Relay:继电非线性; Saturation:饱和非线性; Saturation Dynamic:动态饱和非 线性;
Wrap To Zero:环零非线性。
11.3 相平面法
应用相平面法分析一阶尤其是二阶非线性控制系统,弄清非线性系统的稳定 性、稳定域等基本属性以及解释极限环等特殊现象,具有非常直观形象的效 果。 由于绘制二维以上的相轨迹十分困难,因此相平面法对于二阶以上的系统几 乎无能为力,这是相平面法的局限。
11.2.3 Simulink中的非线性模块
Backlash:间隙非线性; Coulomb&Viscous Friction:库仑 和黏度摩擦非线性;
Dead Zone:死区非线性; Dead Zone Dynamic:动态死区 非线性;
Hit Crossing:冲击非线性; Quantizer:量化非线性; Rate Limiter:比例限制非线性; Rate Limiter Dynamic:动态比例 限制非线性;
智能控制--神经网络控制PPT课件
11. 结合多神经网络自学习控制器的结构图,说明多神 经网络自学习控制系统的基本思想、原理和特点。
.
71
权衡的有效途径:进行多次仿真实验。
✓ 输入信号的选择
时域上,要求输入信号持续加在系统对象上,以便在辨识 时间内充分激励系统的所有模态、反映系统对象的完整 动态过程。(这里的输入信号是加在系统上的信号,也将构成神经
网络的输入或输出信号)
频域上,要求输入信号的频谱覆盖系统的频谱。
✓ 等价准则的选择
等价意味着按照某种误差评价准则,使确定的神经网络模 型最好地拟合所关心的被辨识系统的静态或动态特性。
.
43
(2) 再励学习(强化学习)
介于上述两种情况之间,外部环境只对输出结果给 出评价,而不给出具体答案,学习系统通过强化那 些受奖励的动作来改善自身的性能。
离线学习
对一批实现给定的系统输入输出样本数据进行离线 学习,建立系统的一个逆模型,然后用此逆模型进 行在线控制。
.
44
非线性系统 +
-
神经网络
.
25
神经网络辨识的特点(与传统辨识方法相比)
✓ 神经网络本身作为一种辨识模型,其可调参数反映在网 络内部的极值上,无需建立实际系统的辨识格式。
✓ 借助网络外部的输入/输出数据拟合系统的输入/输出关 系,可对本质非线性系统进行辨识。(网络内部隐含着系统的
特性)
✓ 辨识的收敛速度不依赖于被辨识系统的维数,只与神经 网络本身所采用的学习算法有关。
神经网络控制
.
1
神经网络控制的优越性
神经网络可以处理那些难以用模型或规则描述的过程 或系统。
神经网络采用并行分布式信息处理,具有很强的容错 性。
神经网络是本质非线性系统,可实现任意非线性映射。
.
71
权衡的有效途径:进行多次仿真实验。
✓ 输入信号的选择
时域上,要求输入信号持续加在系统对象上,以便在辨识 时间内充分激励系统的所有模态、反映系统对象的完整 动态过程。(这里的输入信号是加在系统上的信号,也将构成神经
网络的输入或输出信号)
频域上,要求输入信号的频谱覆盖系统的频谱。
✓ 等价准则的选择
等价意味着按照某种误差评价准则,使确定的神经网络模 型最好地拟合所关心的被辨识系统的静态或动态特性。
.
43
(2) 再励学习(强化学习)
介于上述两种情况之间,外部环境只对输出结果给 出评价,而不给出具体答案,学习系统通过强化那 些受奖励的动作来改善自身的性能。
离线学习
对一批实现给定的系统输入输出样本数据进行离线 学习,建立系统的一个逆模型,然后用此逆模型进 行在线控制。
.
44
非线性系统 +
-
神经网络
.
25
神经网络辨识的特点(与传统辨识方法相比)
✓ 神经网络本身作为一种辨识模型,其可调参数反映在网 络内部的极值上,无需建立实际系统的辨识格式。
✓ 借助网络外部的输入/输出数据拟合系统的输入/输出关 系,可对本质非线性系统进行辨识。(网络内部隐含着系统的
特性)
✓ 辨识的收敛速度不依赖于被辨识系统的维数,只与神经 网络本身所采用的学习算法有关。
神经网络控制
.
1
神经网络控制的优越性
神经网络可以处理那些难以用模型或规则描述的过程 或系统。
神经网络采用并行分布式信息处理,具有很强的容错 性。
神经网络是本质非线性系统,可实现任意非线性映射。
RBF网络应用—逼近非线性函数 神经网络控制课件(第三版)

例 2-6-5 M 高斯RBF网络应用 逼近非线性函数
1
RBF网络应用—逼近非线性函数
Matlab程序
m265a.m
4
RBF网络应用—逼近非线性函数
m265a.m执行结果
构造3个高斯RBF
5
RBF网络应用—逼近非线性函数
m265a.m执行结果
构造非线性函数d=f(u)
6
RBF网络应用—逼近非线性函数
12
RBF网络应用—逼近非线性函数
m265b.m执行结果
网络输出
13
RBF网络应用—逼近非线性函数
m265b.m执行结果
非线性函数d(o) 、网络输出y(*)
14
RBF网络应用—逼近非线性函数
m265b.m执行结果
与m265a.m 执行 结果 比较: 相同
非线性函数d(o) 、网络输出y(*)
m265a.m执行结果
设计的网络输出 y逼近d=f(u)
7
RBF网络应用—逼近非线性函数
m265a.m执行结果
Command Window:
w1 = 0.7000
-1.7000
2.1000
-0.1000
2.7000
-1.4000
3.0000
b1 = 26
1. 设计的RBFNN结构。 2. RBFNN的所有参数。 由m265b.m程序,仿真N1,7,1 逼近非线性函数d=f(u)的过程。
10
RBF网络应用—逼近非线性函数
m265b.m执行结果
7个隐层节点的输出
11
RBF网络应用—逼近非线性函数
m265b.m执行结果
7个隐层节点输出的加权、网络输出
15
RBF网络应用—逼近非线性函数
1
RBF网络应用—逼近非线性函数
Matlab程序
m265a.m
4
RBF网络应用—逼近非线性函数
m265a.m执行结果
构造3个高斯RBF
5
RBF网络应用—逼近非线性函数
m265a.m执行结果
构造非线性函数d=f(u)
6
RBF网络应用—逼近非线性函数
12
RBF网络应用—逼近非线性函数
m265b.m执行结果
网络输出
13
RBF网络应用—逼近非线性函数
m265b.m执行结果
非线性函数d(o) 、网络输出y(*)
14
RBF网络应用—逼近非线性函数
m265b.m执行结果
与m265a.m 执行 结果 比较: 相同
非线性函数d(o) 、网络输出y(*)
m265a.m执行结果
设计的网络输出 y逼近d=f(u)
7
RBF网络应用—逼近非线性函数
m265a.m执行结果
Command Window:
w1 = 0.7000
-1.7000
2.1000
-0.1000
2.7000
-1.4000
3.0000
b1 = 26
1. 设计的RBFNN结构。 2. RBFNN的所有参数。 由m265b.m程序,仿真N1,7,1 逼近非线性函数d=f(u)的过程。
10
RBF网络应用—逼近非线性函数
m265b.m执行结果
7个隐层节点的输出
11
RBF网络应用—逼近非线性函数
m265b.m执行结果
7个隐层节点输出的加权、网络输出
15
RBF网络应用—逼近非线性函数
绝对经典RBF神经网络ppt课件

exp
1
2 i 2
X k ti
2
k 1,2,N;i 1,2,, I
该网络为局部逼近网络
RBF网络的工作原理
函数逼近: 以任意精度逼近任一连续函数。一般函数都可表示成一组 基函数的线性组合,RBF网络相当于用隐层单元的输出构 成一组基函数,然后用输出层来进行线性组合,以完成 逼近功能。
分类: 解决非线性可分问题。RBF网络用隐层单元先将非线性可 分的输入空间设法变换到线性可分的特征空间(通常是高 维空间),然后用输出层来进行线性划分,完成分类功能。
j1
举1.问例题:的提R出:B假F设网如下络的输实入现输出函样本数,输逼入向近量为[-1 1] 区间上等间隔的数组成的向量P,相应的期望值向量为T。
P=-1:0.1:1; T=[-0.9602 -0.5770 -0.0729 0.3771 0.6405 0.6600 0.4609 0.1336 -
则扩展常数可取为
3.学权习值权的学值习可以用LMS学习算法
注意:①LMS算法的输入为RBF网络隐含层的输出
②RBF网络输出层的神经元只是对隐含层
神经元的输出加权和。
因此RBF网奇络异的矩实阵际或输非出方为阵Y的n矩阵不GnW n
其中 Y nXAXy=k存Aj ,在AnX逆,Ak矩=X阵1,,2则若, X称, N为; j 1,2, J
用用L伪M逆S方方法法A求求的解解伪pWi逆Wnv阵(n。AG)在1 D求ma伪Wtl逆aDnb中用d1X,n
e
dk
n
,
d
N
T
D为期望响应 G 是矩阵 G的伪逆
伪逆的求法 G G T G 1 G T
第四章 根轨迹法 matlab simulink与控制系统仿真 第三版 课件
分支数=开环极点数 =开环特征方程的阶数
二、根轨迹对称于实轴
闭环极点为 实数→在实轴上 复数→共轭→对称于实轴
返回子目录
28
三、根轨迹的起点与终点
起于开环极点,终于开环零点。
由根轨迹方程有:
m
i 1 n
(s (s
zi ) pi)
1 K*
i1
29
起点 K* 0 → spi 0→ s pi
终点 K* → szi 0 → s zi
n
1
m
1
i1 dpi j1 dzj
z 式中: j 为各开环零点的数值;
p i 为各开环极点的数值。
50
例4-6
•已知系统的开环传递函数
G(s)H(s) K*(s1) s23s3.25
试求闭环系统的根轨迹分离点坐标d,并概 略绘制出根轨迹图。
51
解:根据系统开环传递函数求出开环极点
p 1 1 .5j1 ,p 2 1 .5j1
• 在实际应用中,用相角方程绘制根轨迹, 而模值方程主要用来确定已知根轨迹上某一点
的 K * 值。
20
例4-1
已知系统的开环传递函数 G (s)H (s)2K/(s2)2
试证明复平面上点 s1 2j4 ,s2 2j4 是该系统的闭环极点。
证明: 该系统的开环极点 p1 2, p2 2
若系统闭环极点为 s1 , s2
分离角计算公式
d1 l[2 (k1)π jm 1
n
dzj dsi]
il1
(4-45)
56
式中:
d 为分离点坐标;
z j为开环零点; si为当 kkd时,l除 个重极点外 其他 nl个非重根。
所谓会合角是指根轨迹进入重极点处 的切线与实轴正方向的夹角。
二、根轨迹对称于实轴
闭环极点为 实数→在实轴上 复数→共轭→对称于实轴
返回子目录
28
三、根轨迹的起点与终点
起于开环极点,终于开环零点。
由根轨迹方程有:
m
i 1 n
(s (s
zi ) pi)
1 K*
i1
29
起点 K* 0 → spi 0→ s pi
终点 K* → szi 0 → s zi
n
1
m
1
i1 dpi j1 dzj
z 式中: j 为各开环零点的数值;
p i 为各开环极点的数值。
50
例4-6
•已知系统的开环传递函数
G(s)H(s) K*(s1) s23s3.25
试求闭环系统的根轨迹分离点坐标d,并概 略绘制出根轨迹图。
51
解:根据系统开环传递函数求出开环极点
p 1 1 .5j1 ,p 2 1 .5j1
• 在实际应用中,用相角方程绘制根轨迹, 而模值方程主要用来确定已知根轨迹上某一点
的 K * 值。
20
例4-1
已知系统的开环传递函数 G (s)H (s)2K/(s2)2
试证明复平面上点 s1 2j4 ,s2 2j4 是该系统的闭环极点。
证明: 该系统的开环极点 p1 2, p2 2
若系统闭环极点为 s1 , s2
分离角计算公式
d1 l[2 (k1)π jm 1
n
dzj dsi]
il1
(4-45)
56
式中:
d 为分离点坐标;
z j为开环零点; si为当 kkd时,l除 个重极点外 其他 nl个非重根。
所谓会合角是指根轨迹进入重极点处 的切线与实轴正方向的夹角。
智能控制(第三版)chap9-神经网络控制
1
第9章 神经网络控制
9.1 概述
神经网络是一种具有高度非线性的连续时间动力 系统,它有着很强的自学习功能和对非线性系统的强 大映射能力,已广泛应用于复杂对象的控制中。
神经网络的硬件实现愈趋方便。大规模集成电路 技术的发展为神经网络的硬件实现提供了技术手段。
2
神经网络控制所取得的进展为: (1) 基于神经网络的系统辨识:可在已知常规模型结构 的情况下,估计模型的参数;或利用神经网络的非线 性特性,建立非线性系统的静态、动态、逆动态及预 测模型;
图9-2(a) 神经网络直接逆控制 14
(2)神经网络间接自校正控制:使用常规控制器, 神经网络估计器需要较高的建模精度。假设控制对象: y(t) = f(yt) + g(yt)u(t),其结构如图9-3所示。
图9-3 神经网络间接自校正控制
15
假设被控对象为如下单变量仿射非线性系统:
y(t)fytgytu(t)
第9章 神经网络控制
9.1 概述 9.2 神经网络控制结构 9.3 单神经元网络控制 9.4 RBF网络监督控制 9.5 RBF网络自校正控制 9.6 基于RBF网络直接模型参考自适应控制 9.7 一种简单的RBF网络自适应控制
9.8 基于不确定逼近的RBF网络自适应控制 9.9 基于模型整体逼近的机器人RBF网络自适应控制 9.10 神经网络数字控制
11
9.2.3 神经网络自适应控制
①与传统自适应控制相同,神经网络自适应控制也分 为神经网络自校正控制和神经网络模型参考自适应 控制两种。
②自校正控制根据系统正向或逆向模型的结果来调节 控制器内部参数,使系统满足给定的指标。
③而在模型参考自适应控制中,闭环控制系统的期望 性能由一个稳定的参考模型来描述。
第9章 神经网络控制
9.1 概述
神经网络是一种具有高度非线性的连续时间动力 系统,它有着很强的自学习功能和对非线性系统的强 大映射能力,已广泛应用于复杂对象的控制中。
神经网络的硬件实现愈趋方便。大规模集成电路 技术的发展为神经网络的硬件实现提供了技术手段。
2
神经网络控制所取得的进展为: (1) 基于神经网络的系统辨识:可在已知常规模型结构 的情况下,估计模型的参数;或利用神经网络的非线 性特性,建立非线性系统的静态、动态、逆动态及预 测模型;
图9-2(a) 神经网络直接逆控制 14
(2)神经网络间接自校正控制:使用常规控制器, 神经网络估计器需要较高的建模精度。假设控制对象: y(t) = f(yt) + g(yt)u(t),其结构如图9-3所示。
图9-3 神经网络间接自校正控制
15
假设被控对象为如下单变量仿射非线性系统:
y(t)fytgytu(t)
第9章 神经网络控制
9.1 概述 9.2 神经网络控制结构 9.3 单神经元网络控制 9.4 RBF网络监督控制 9.5 RBF网络自校正控制 9.6 基于RBF网络直接模型参考自适应控制 9.7 一种简单的RBF网络自适应控制
9.8 基于不确定逼近的RBF网络自适应控制 9.9 基于模型整体逼近的机器人RBF网络自适应控制 9.10 神经网络数字控制
11
9.2.3 神经网络自适应控制
①与传统自适应控制相同,神经网络自适应控制也分 为神经网络自校正控制和神经网络模型参考自适应 控制两种。
②自校正控制根据系统正向或逆向模型的结果来调节 控制器内部参数,使系统满足给定的指标。
③而在模型参考自适应控制中,闭环控制系统的期望 性能由一个稳定的参考模型来描述。