履带式地面移动机器人动力学模型分析(1)
履带式机器人运动学分析
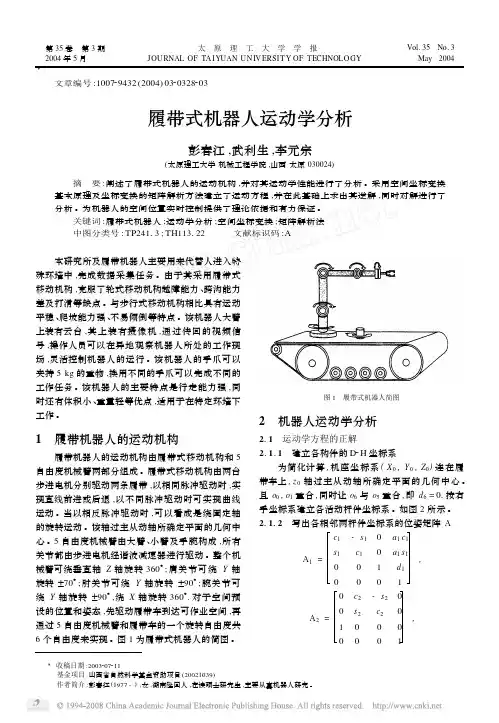
本研究所及履带机器人主要用来代替人进入特 殊环境中 ,完成数据采集任务 。由于其采用履带式 移动机构 ,克服了轮式移动机构越障能力 、 跨沟能力 差及打滑等缺点 。与步行式移动机构相比具有运动 平稳 、 爬坡能力强 、 不易倾倒等特点 。该机器人大臂 上装有云台 , 其上装有摄像机 , 通过传回的视频信 号 ,操作人员可以在异地观察机器人所处的工作现 场 ,灵活控制机器人的运行 。该机器人的手爪可以 夹持 5 kg 的重物 ,换用不同的手爪可以完成不同的 工作任务 。该机器人的主要特点是行走能力强 , 同 时还有体积小 、 重量轻等优点 ,适用于在特定环境下 工作 。
得: θ 6 = a tan 2 ( - s 12 n x + c12 n y , - s 12 ox + c12 oy ) . 由
c45 = c12 s 3 a x + s 12 s 3 a y + c3 a z , s 45 = c12 c3 a x + s 12 c3 a y - s 3 a z , c12 c3 a x + s 12 c3 a y - s 3 a z c12 s 3 a x + s 12 s 3 a y + c3 a z - θ 4.
0
c34 c5 - s 34 s 5 s 34 c5 + c34 s 5
1
a 4 c34 + a3 c3 a4 s 34 + a3 s 3
2
T6 = A 3 A 4 A 5 A 6 =
0 0
ay , ax
0 0
.
0
0
在
A 2- 1
A 1- 1
T6 = A 3 A 4 A 5 A 6 中 , 由第三行第三
履带机械地面力学建模及牵引性能仿真与试验
的水平分量[6Ο7 ] ,以驱动轮后置为例 ,为了便于表达 ,
用导向轮中心在车辆沉陷前后的位移差表示土壤的
压陷深度 ,根据力学换算关系将行驶阻力加载于车
辆机体的质心处. 履带压缩土壤的做功为
∫Di
W = bS pd D = 0
∫Di
bS
kc + kφ (ΔD) n d D =
0b
bS n +1
kc b
+ kφ
D n+1 i
(10)
式中 : Di 为第 i 块履带板的压陷深度 ; S 为履带行驶
距离. 行驶阻力则可认为是 R = W / S ,即
R
=
n
b +
1
kc b
+ kφ
D n+1 i
(11)
2 履带行驶力学仿真建模
21 1 多体力学建模 考虑到软件 ADAMS 几何建模的功能较差 , 本
44
西 安 交 通 大 学 学 报 第 43 卷
向力可以采取类似切向力的表达 ,即
∫ Fz
=
ab
l
( c + ptanφ) (1 -
e - |δz| / k ) d x
0
(9)Leabharlann 侧向剪切位移∫ δz = vl^u′1 d t
行驶阻力是由履带挤压土壤而产生的变形阻力
x g = ( x′l^u′1 + y′g^u′2 + z′l^u′3 ) ^u1
y g = ( x′l^u′1 + y′g^u′2 + z′l^u′3 ) ^u2
(2)
z g = ( x′l^u′1 + y′g^u′2 + z′l^u′3 ) ^u3
潘侍卫-高速履带行走动力学分析
第一章绪论1.1课题研究的背景及意义履带车辆本身是非常复杂的机械系统,其显著特点是行动部分采用履带行驶装置,履带是在发明车轮之后又一重大突破,履带装置将车辆从传统的“线”的活动范围改良为“面”的活动范围,使得在复杂多变的使用环境中履带车辆的野外行驶能力,越障能力和机动性能都得到保证。
随着现代履带车辆对机动性要求不断提高,车辆在斜坡行驶、软地急转弯等恶劣工况行驶过程中耙齿、脱轮现象时有发生,使得车辆丧失机动性,陷入“瘫痪”状态,直接影响了车辆的行驶通过性和作战任务等。
现代军用履带车辆的发展总趋势是要求在降低车辆功耗的同时又要提高履带在链环上的稳定性[1],以防止履带发生耙齿、脱轮现象。
这不仅是提高车辆机动性的保证,而且可以改善车辆行驶平稳性和乘员的舒适性。
因此对履带车辆行动系统动力学研究具有重要的实际意义。
本课题来源于“十二五”预研项目:“履带车辆行动系统高速啮合技术研究”,论文的重点是履带装甲车辆行动部分动力学分析研究。
以特定类型履带装甲车辆为研究对象,以探究履带式车辆脱轮问题为出发点,着重研究履带装置各部件作用机理,并建立履带装置张紧力的数学模型和履带车辆的多体动力学模型,进行不同工况下的仿真分析。
论文针对车辆典型行驶工况中脱轮问题进行重点分析,为提高履带车辆行驶性能和对脱轮问题的理论研究提供参考。
通过建立履带装置张紧力的数学模型,达到对张紧力控制的目标,通过控制履带张紧力,防止履带耙齿、脱轮现象发生;同时建立履带车辆的多体动力学模型,并且进行不同工况下的仿真,将结果与计算数据对比,以此来论证数学模型的准确程度,并且分析不同工况下履带受力状况,对提高履带行驶系统的设计水平及防止脱轮现象发生具有重要意义,为保持履带车辆的整车行驶性能良好提供了很大帮助,也为未来实现张紧力的控制提供理论基础。
1.2履带车辆行动部分的研究现状1.2.1履带行动部分介绍履带行动部分由主动轮、履带、负重轮、诱导轮、履带张紧装置、托带轮(或托边轮)、张紧轮及诱导轮补偿张紧机构等部件组成。
210979654_基于ADAMS_的履带式挖掘机越障动力学建模与分析
基于ADAMS 的履带式挖掘机越障动力学建模与分析秦仙蓉1 冯亚磊1 沈健花2 张 氢1 孙远韬11同济大学机械与能源工程学院 上海 201804 2惠普信息技术研发有限公司 上海 200131摘 要:履带式挖掘机作业时需跨越各类障碍物,在履带式挖掘机跨越障碍物时会受到来自地面的冲击载荷而产生疲劳破环,故研究履带式挖掘机的整机越障动力学特性十分必要。
基于动力学仿真软件ADAMS,研究了履带式挖掘机的整机越障动力学特性。
以某中型履带式挖掘机为例,在Pro/E 中完成履带式挖掘机的三维建模,在ADAMS 中建立其简化虚拟样机,完成该履带式挖掘机越障的动力学仿真。
结果表明:越障过程中,挖掘机车体垂向最大位移与障碍物设置高度一致,整个越障过程较为平稳。
此外,车体的转动角速度在车体越过障碍边缘到引导轮触地时刻存在较明显的变化过程。
关键词:履带式挖掘机;越障;动力学仿真;虚拟样机中图分类号:U446 文献标识码:A 文章编号:1001-0785(2023)05-0018-05Abstract: In view of the fact that crawler excavators need to cross all kinds of obstacles during operation, and are easily subjected to impact load from the ground, resulting in fatigue damage, it is necessary to study the dynamic characteristics of the whole crawler excavator crossing obstacles. In this study, based on the dynamic simulation software Adams, the dynamic characteristics of the whole crawler excavator are studied. Taking a medium-sized crawler excavator as an example, the three-dimensional modeling of the crawler excavator is completed in ProE, and its simplified virtual prototype is established in Adams, and the dynamic simulation of the crawler excavator crossing obstacles is completed. The results show that the vertical maximum displacement of the excavator body is consistent with the height of the obstacle during the obstacle crossing, and the body is relatively stable during the whole obstacle crossing. In addition, the rotation angular velocity of the excavator changes obviously, which occurs during the period when the excavator travels to the edge of obstacle crossing and the guide wheel touches the ground.Keywords: crawler excavator; obstacle crossing; dynamic simulation; virtual prototype0 引言挖掘机被广泛用在各类土石方开挖工程现场,据不完全统计,土石方施工过程中约60%的土石方开挖都是靠挖掘机来完成的。
微小型履带式移动机器人与地面交互特性分析
坦 克 为研 究对 象 ,利 用 DADS分 析 了履 带车 辆 的动 力 学 特 性 。实 验 结 果 验 证 了 DADS提 供 的履 带 模 型 的有 效 性 】 故 以微 小 型 履 带 式 移 动 机 器 人 原 型 为 。 基 础 ,利 用 A DAMS建 立 该 机 器 人 模 型 ,对 其 在 不 同路 面 情 况 下 的运 动 特 性 进 行 分 析 。
ki e i onto fr bot n tc c r lo o . Ke ywor s d :M i —r ck obier bot nita ed m l o ;Te r i r a n;I e a ton c r t rs i A D A M S nt r c i ha ac e i tc:
T NG Y -eg Y NG Qig A afn . A n
( e to p c q ime tIsi t f mma d& T c n lg f q ime t B in 0 4 6 C ia D p . f aeE up n, ntueo S t Co n e h oo yo up n, e ig1 1 1 , hn ) E j
f r e ft i r b tae a d d i h s e vr n o c s o h s o o r d e n t i n i o me t a c r i g t h h i a ic ms a c s e r i h r c e it s a e n c o d n o t e p ysc l cr u t n e .T r a n c a a t rs i r c a p id t h p l o t e mo e sn u r u i e .a d t e h o o o i n c a a t r si s o h n . a k d mo l o o r e d l u i g s b o tn s n h n t e l c m t h r c e itc f t e mi it c e bi r b t a e o r e
第二章履带式机械行驶理论
•(2)履带行走机构存在内部阻力:
•1)各链轨节铰链中的摩擦; •2)驱动轮与链轨啮合时的摩擦; •3)导向轮和拖链轮轴承的摩擦 •4)支重轮轴承的摩擦和支重轮在链轨上的滚动摩 擦。
第二章履带式机械行驶理论
• 由于这些摩擦损失的存在,显然,驱动力矩在形 成切线牵引力时必须消耗一部分力矩用来克服行走机 构内部的摩擦损失。即在驱动力矩中必须扣除一部分 力矩后才能与切线牵引力相平衡:
第二章履带式机械行驶理论
•2、履带卷绕运动的平均速度的计算:
• 可通过驱动轮每转一圈所卷绕(转过)的链轨节的总长 来计算,即单位时间内所卷绕的链轨节的长度:
•则履带卷绕运动的平均速度可由下式计算:
第二章履带式机械行驶理论
• 3、车辆的理论行驶速度vT : •(1)定义:履带在地面上无相对运动时的平均行驶
表明了由于滑转而引起的车辆行程或速度的损失 。
第二章履带式机械行驶理论
二、履带行走机构的动力学
• 讨论履带车辆在水平地面上作等速直线行驶时的 动力学问题。
• 履带车辆工作时,其上作用着抵抗车辆前进的各 种外部阻力和推动车辆前进的驱动力——切线牵 引力。而切线牵引力本身则由驱动链轮上的驱动 力矩所产生。
• 为简化履带行走机构运动学的分析,通常将这种 极限状态作为计算车辆行驶速度的依据。此时,假设履 带节为无限小,因此履带可看成是一条挠性钢带。这一 挠性钢带既不伸长也不缩短,且相对于驱动轮无任何滑 动。根据上述假设,履带就具有下图所示的形状。当驱 动轮齿数相当多时,此种假设是可以容许的。
第二章履带式机械行驶理论
•二、影响滚动阻力的因素:
•1、内部行驶阻力的影响因素: •(1)履带张紧度:履带过分张紧或松驰均会引起其摩 擦损失的增大。下图表示了在相同试验条件下获得的 履带式机械的牵引功率与履带张紧度的关系。履带张 紧度过大时法向压力增大,使各轴承和铰链处的摩擦 损失增大;反之,履带过分松驰,履带上下振动消耗 的功率及履带经过托链轮、驱动轮、导向轮时冲击损 失过大。这些损失均与履带式机械的行驶速度有关。
橡胶履带车辆行走系统的动力学模型及脱轮问题仿真分析
连线与水平面的夹角,
;
a tj,
btj分别为摆动轴轴心到悬置质量质心的水平、垂直距离,
mm;
T
i,
T
r i
分别
为
支重轮左、右两侧的履带张力, N; F tj, F ti分别为悬架、地面对支重轮的作用力, N。
从以上公式可以看出, 在已知外界激励和整机结构参数的情况下, 通过计算能够得到车体和支重轮
的位移、速度和加速度以及悬架相对动行程等数值。
14
河南科技大学学报: 自然科学版
2 006 年
2 悬架系统的作用力
油气悬架的刚度和阻尼不是定值, 这里将其等效为一定值。因此油气悬架系统对支重轮的作用力 表示为
Fi1 = k1 yi1 + c1 yi1 ( i = 1 ~ 2, j = 1)
Fi2 = k2 yi2 + c2 yi2 ( i = 3 ~ 4, j = 2)
1. 8 1010
支重轮刚度系数 kw i / ( N /mm )
6 13
支重轮质量 mw i / kg
113. 5
油气弹簧等效刚度 kj /( N /mm )
7 85
质心位置 ( a, e, h) /mm
( 1374, 0, 990) 油气弹簧等效阻尼 cj / ( N s /mm )
22. 5
橡胶履带芯铁导向齿高 / mm
( 1) 驱动轮与其相邻支重轮之间的履带张紧力 T s2
T s2
=
Ms rs
( 7)
式中 M s 为驱动力矩; rs 为驱动轮半径, mm。
( 2) 张紧轮与其相邻支重轮之间的履带张紧力 T i2。不考虑履带质量并忽略履带与张紧轮之间的摩
机器人履带移动控制的力学问题研究
机器人履带移动控制的力学问题研究随着科技的发展,机器人已经逐渐成为人们生活中不可或缺的一部分。
从工业生产到医疗保健,从教育培训到家庭服务,机器人的应用场景越来越广泛。
其中,机器人履带移动技术的发展已经逐渐成熟,成为机器人移动领域的一种重要方式。
在这样的背景下,对于机器人履带移动控制的力学问题进行研究,具有重要意义。
一、机器人履带移动技术的基本原理机器人履带移动技术利用履带作为机器人的移动器官,具有良好的通过性能,适应于复杂地形和恶劣环境下的移动任务。
与腿式机器人相比,履带式机器人可以具有更高的稳定性和较大载重能力,但相应的机械系统也更加复杂。
在机器人履带移动技术中,控制履带的转速和方向,是实现机器人移动的关键。
通过不同的控制方式,机器人可以进行直线移动、弧线移动、旋转等多种运动方式。
其中,直线移动时左右履带旋转速度相等,方向相反;旋转时左右履带的转速相反;弧线移动时,通过左右履带转速调整实现曲线运动。
二、履带移动机构的力学问题机器人履带移动机构由两个履带组成,每个履带由多个履带节组成,同时支撑机器人重量并提供牵引力。
因此,在探究机器人履带移动控制问题时,力学问题是必不可少的一部分。
在机器人履带移动中,力学问题主要包括摩擦力、牵引力和稳定性控制。
其中,摩擦力是指履带和地面之间的摩擦力,牵引力是机器人向前推进时产生的力,稳定性控制则是在不同地形下保持机器人平稳移动的问题。
针对这些力学问题,计算机模拟技术和实验研究是有效的解决途径。
通过建立履带移动力学模型,可以对机器人进行不同场景下的运动仿真,评估不同控制策略对机器人性能的影响;同时,实验数据也可以为机器人履带移动控制的算法和参数调整提供参考。
三、履带移动机构中的控制算法问题为了实现机器人履带移动的精确控制,涉及到的控制算法问题也逐渐受到重视。
在机器人履带移动控制算法中,主要有踏频控制、PID控制、模糊控制等多种技术应用。
其中,踏频控制是机器人履带移动的基础,它利用踏频控制方法控制履带的动作,实现机器人的前进、后退、转向等基本运动。
履带式地面移动机器人动力学模型分析(1)
履带式移动机器人研究
履带式移动机器人研究作者:闫守前来源:《中国机械·上半月》2019年第01期摘要:随着科学技术的进步和生产的发展,国民经济各部门要求不断提供先进的技术装备、研制新的产品品种,以满足国民经济继续发展和人民生活质量不断提高的需要。
机器人的出现解决了人们的疑难问题,为生活提供了方便。
本文认真研究了履带式机器人的稳定性,指出了履带式机器人研究中存在的问题。
关键词:履带式;机器人;稳定性1 机器人的特点分析1.1 稳定性分析履带是人类继发明车轮之后又跨出的一大步,扩展了车辆由“线”到“面”的活动范围,履带式车辆既加强了离开道路的越野能力,同时也增大了负重能力在越野及爬坡时的稳定性有了大大的提高。
履带式机器人的稳定性是指它保持稳定不倾翻、不下滑的性能。
履带式机器人的稳定性对机器人本身的结构安全有直接影响,此外还对机器人的操纵性能有直接的影响。
稳定性分析包括纵向稳定性分析和横向稳定性分析。
1.2 纵向稳定性履带式机器人的极限坡度角和极限下滑角是纵向稳定性的基本评价指標。
图1为履带式机器人的极限坡度角,在上坡时重心不能落在后履带轮的后面,否则就会向后倾覆。
由此可知,机器人的上坡极限坡度角αlim的值为:同样的道理,机器人的下坡极限坡度角的值为:式(2)中,L为机器人履带的接地长度。
履带式机器人的极限下滑角,指机器人停在坡道上不下滑时的最大坡度角。
极限下滑角的值为:1.3 横向稳定性履带式机器人的横向稳定性包括两个方面:沿行走装置下侧边缘的横向翻倾和行走装置沿横坡侧滑。
图2为履带式工作车辆在横向斜坡上稳定工作时的受力简图。
图2中,b为车辆履带接地宽度,B为车辆轨距,e为车辆重心离开纵向对称平面的偏移距离,Y1 , Y2为两履带的土壤垂直反力,Z1, Z2为土壤作用于两履带的平行于坡面的力,β为横坡角度。
当机器人处于临界状态接开始横坡翻倾时,右侧履带不再受力即垂直反力Y1=0,整个机器人的重量mg作用在左侧履带的下侧边缘,于是对Y2取矩有:由式(4)可得到车辆的横向极限坡度角为:当开始横坡下滑时,有:由式(6)可得到:其中,为履带式工作车辆的横向附着系数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
成, 其简化示意图 如 图 1 所 示。 移 动 平 台 是一 台轻 型 2 个 驱 动 轮、 4 个负重轮和两个 履带车, 由底盘( 车 体、 诱导轮) 和 两 条 履带 组 成; 两 条 履带分 别 由 独 立的 电 机驱动, 搭载的机械臂可以简化为两自由度机械臂, 分 别由独 立 电 机 驱 动 且 安 装 在 平 台 的 质 心 位 置 O m - Xm Ym Zm , 整个系统是一个非完整约束系统。
[24 ]
近些年来, 履带式移 动机 器人 因 其 具 有 广 阔 的 应 用前景, 如 采 矿、 伐木、 耕 作、 挖掘、 行 星探 测、 反 恐、 搜 索和 救 援 等 , 吸引了 众 多 学 者 的 关 注。 与轮 式车 辆 相 比, 履带车可以防止下陷并提供更强的牵引力, 与地面 有 更 大 的 接 触 面 积, 从而使其更适合非结构化路 面
第 28 卷第 3 期 2011 年 3 月
机
电
工
程
Journal of Mechanical & Electrical Engineering
Vol. 28 No. 3 Mar. 2011
履带 式 地 面 移 动 机 器人 动 力 学 模 型 分 析
黄思姬 , 欧 屹, 陶卫军 , 冯虎田
( 南京理工大学 机械工程学院, 江苏 南京 210094 )
第3 期
黄思姬, 等: 履带式地面移动机器人动力学模型分析
· 281·
妍
[5 ]
基 于 完整约束 条 件 将 履带车 简 化 为 单 体 与 多 体
[6 ]
y m ) 和 方 向 角 m 决 定。 由 臂运动学方程由点 O m ( x m , 如图 2 所示可得:
i +1 i i i +1 i i Δx m = x m - x m = O m O m ·cos ( m + α ) i +1 i i i +1 i i Δy m = y m - y m = O m O m ·sin ( m + α ) i +1 i Δ m = m - m = γ
Abstract: Currently,aiming at the problem that,modeling,simulation and control of the system of the tracked mobile robot are imperfect, the mobile modular manipulator was considered as a overall structure and a system model of the tracked mobile robot with nonholonomic constraints was built. A nonholonomic constraint system model of tracked mobile robot was formulated by applying an integrated dynamic model and considering the mobile modular manipulators as a unit. Based on the extreme theory and consideration of trackterrain interactions,the direct kinematics analysis and the turning dynamic analysis of the mobile robot respectively were conduced,and slippage ratio curves were obtained. The Lagrange dynamic method of the robot and Routh equations of nonholonomic dynamics were used to establish a precise dynamic model. Subsequently,the nonholonomic dynamic model and the traditional solution model of driving force curves were compared. The results show the feasibility of the formulated mathematical model. Key words: tracked mobile robot; longitudinal slippage velocity; nonholonomic dynamics modeling
·
( 5)
由图 2 的几何关系可得: O im O im+ 1 = 2sin
2
设惯 性 坐 标系 为 O B - X B Y B Z B , 机 器人 移 动机械
( 6)
· 282·
机
电
工
程
第 28 卷
i i 由式( 1 ) 、 式( 6 ) 及图 2 所示 α = γ / 2 + β 可得:
Δx m = 2sin
0
引
言
臂组成, 搭载的机械臂用来完成一定的操作任务, 而履 带车体用来搭载机械 臂, 使 得 整 个 机 器人 拥 有 几 乎 无 限大的操作空间和 高 度 的 运 动 冗余 性, 这 使它 优于移 动机器人和传统的机械臂, 因此具有广阔的应用前景。 然而, 由于履带与地 面 的 相 互 作 用 和 车 体 与 机械 臂 的 相对运动, 使得对这一 整 个结 构 的 运 动学 模型 进 行公 式化成为一项极富挑战性的工作。尽管目前已有不少 对轮式移动机械 臂 建 模、 仿真 和 控制 的 研究
·
·
( 8)
式( 7 ) 两边同 乘 以 1 / Δt , Δt →0 时 取 极 限, 同时将 式( 5 ) 和式( 8 ) 代入可得:
·
( 7)
i i 将式( 7 ) 代入 tan β = d0 / OA C 可得:
xm =
[ r( · ql + · qr) + ( · s lx + · s rx) ] cos m - 2 d0[ r( · qr - · ql) + ( · s rx - · s lx) ] sin m dm
Δ m Δ m i 2 ·槡 d2 ·cos im + + βi 0 + OA C 2 2
2 i m
Δ m i ·槡 d2 Δy m = 2sin 0 + OA C 2
( ·sin (
Δ m + 2
ห้องสมุดไป่ตู้
) +β )
i
2 d0 m
2 2 [ r( · ql + · qr) + ( · s lx + · s rx) ] + 4 d2 0 m 槡
( ·γ = (
OA iC - OA iC
) d + ) ·Δ 2
m
dm ·Δ m = r·Δq l + s lx 2
m
( 2) ( 3)
= r·Δq r + s rx
r —驱 动 式中: Δq l 、 Δq r —左右 两 侧 履带 的驱 动 轮 转角, s lx 、 s rx —左右 侧 履带 的 纵 向 滑 动, d m —两 条 履 轮半径, d0 —质 心 O m 和 A c 之 间 的 带几何 中 心 之 间 的 距 离, 距离。 “式( 3 ) - 式 ( 2 ) ” , 计算 两 边 同 乘 以 1 / Δt, Δt → 0 时取极限得: m =
Δt→0
limcos β i = lim
模型相结合进行动 力 学 建 模 与 仿真; 王 月 梅
采用多
刚 体 系统 理论 建 立 了 履带车 辆 的 动 力 学 模型, 并用 “冰刀 + 车 轮 ” 的 模式 对 履带 进 行 约束。 蒋 文 萍 和 葛 为民
[7 ]
( 1)
公 开 了一种 履带式移 动机械 手 的 广 义 动 力 学
建模方法。机器人移动机械臂的不确定性主要来自移 动平台与搭载的机械臂相互耦合作用和非结构化环境 引起的随机干扰, 需将 移 动机械 臂 当 做 一个 整体 来 建 立统一的数学模型。对于轮式和履带式车辆滑移基于 车辆 地 面 理论
*
摘要: 针对目前履带式地面移动机器人系统的建模、 仿真和控制研究很不完善的问题, 将移动式模块化 的 机械 手 做 一个 整体 结 构 考 建立了一种非完整约束的履带式机器人系统模型。运用极限理论进行了正向运动学分析; 考虑 履带 与 地 面 的 相 互 作 用 因 素, 对 虑, 移动机器人进行了转向动力学分析, 以求得滑转率曲线; 利用机器人 Lagrange 动力学方法和非完整动力学 Routh 方程建立了精确的 履带式地面移动机器人动力学模型; 将模型求解出的驱动力曲线与经典计算方法得出的结论相对比。 研究 结果 验 证 了 所 建数 学 模 型的可行性。 关键词: 履带式移动机器人; 滑移速度; 非完整动力学模型 中图分类号: TH113 ; TP242 文献标志码: A 文章编号: 1001 - 4551 ( 2011 ) 03 - 0280 - 06
·
1 [ r( · qr - · ql) + ( · s rx - · s lx ) ] dm
( 4)
“式( 3 ) + 式 ( 2 ) ” , 计算 右侧分子分母同乘以 1 / Δt, Δt→0 时取极限得: OA iC =
图1 履带式移动机械臂系统简化模型
r( · ql + · qr) + ( · s lx + · s rx ) 2 m Δ m i ·槡 d2 0 + OA C 2