Maxwell仿真永磁同步电机步骤.pdf
Maxwell仿真永磁同步电机步骤

Ansoft Maxwell 14 永磁同步电机仿真步骤总结
首先就是建立一个RMxprt文件,选择电机类型为下图的
Permanent-MagnetSynchronous Motor
只要按照下面的参数输入即可
磁钢材料NTP264H要自己定义
Danper就是怎么出来的?要右键”Rotor’ ,选择Insert Danper,就可以了
所有参数输入完毕,现在要定义个求解设置,右键“Analysis”添加一个setup,
模型
绕组的连接如下
求解结果
一键导入到maxwell14 2D瞬态场里去分析即可,右键Analysis setup 的creat Maxwell design ,auto setup 要打勾
导入模型如图,就是1/4模型(导入整个模型的方法?加注fragnet 1)
因为就是1/4模型,所以要设置一个Symmetry Multiplier ,右键”model”,就可以瞧到,设置如下
电机在零负载转矩的起动:点击“model”的树,将其展开,双击Motion setup 作如下设置
为了得到,更好的仿真图像,设置一下仿真时间,双击Solve setup 作如下设置
以下就就是在零负载转矩的情况下的得出的各种起动时间图,横轴的时间单位就是毫秒(ms)
做完了以上的仿真,再做一个电机在额定负载下的起动过程,把上面的文件复制一下,然后改
一下名称,结果如图然后双击负载的那个,改一个参数就可以,要改的参数,在motion setup里(上面有提到过的)将load Torque 设置成如下就可以,然后开始让电脑开始仿真(Analys all)
结果的图如下。
maxwell软件- 调速永磁同步电机
13调速永磁同步电机在用户已经掌握RMxprt 基本使用的前提下,我们将一些过程简化,以便介绍一些更高级的使用。
有关RMxprt 的详细介绍请参考第一部分的章节。
13.1基本原理调速永磁同步电机的转子转速是通过调节输入电压的频率来控制的。
与标准的直流无刷电机不同,这种电机不需要位置传感器。
永磁同步电机的转子上安装永磁体(有内转子与外转子之分),定子上嵌有多相电枢绕组,其极数与转子相同。
永磁同步电机既可用作发电机,也可用作电动机。
当电机工作在电动状态时,定子多相绕组可由正弦交流电源供电或由直流电源经DC/AC 变换来供电。
当电机工作在发电状态时,定子多相绕组为负载提供交流电源。
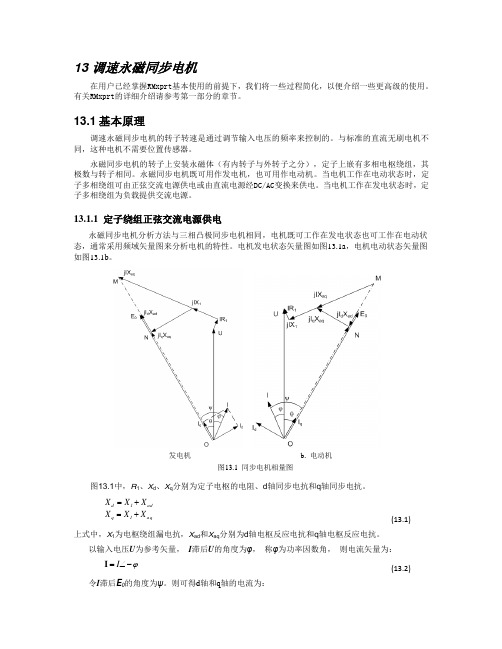
13.1.1 定子绕组正弦交流电源供电永磁同步电机分析方法与三相凸极同步电机相同,电机既可工作在发电状态也可工作在电动状态,通常采用频域矢量图来分析电机的特性。
电机发电状态矢量图如图13.1a ,电机电动状态矢量图如图13.1b 。
发电机b. 电动机图13.1 同步电机相量图图13.1中,R 1、X d 、X q 分别为定子电枢的电阻、d 轴同步电抗和q 轴同步电抗。
aq1q ad 1d X X X X X X +=+=(13.1)上式中,X 1为电枢绕组漏电抗,X ad 和X aq 分别为d 轴电枢反应电抗和q 轴电枢反应电抗。
以输入电压U 为参考矢量, I 滞后U 的角度为φ, 称φ为功率因数角, 则电流矢量为:ϕ-∠=I I(13.2)令I 滞后E 0的角度为ψ。
则可得d 轴和q 轴的电流为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=ψψcos sin I I I q d I (13.3)所以:qd 1I I -=tan ψ (13.4)13.1.1.1 发电机模型在图13.1a ,OM 所代表的矢量可表示为:)j j (aq 11X X R OM +++=I U (13.5)OM 所代表的矢量可用来确定E 0的位置。
令U 滞后E 0的角度为θ,对于发电机称θ为功角,则角度ψ为θϕψ+=(13.6)对于给定的功角θ,我们有;⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-θθsin cos U U E I I X R R X 0q d q 11d (13.7)求得I d 和I q 为:⎥⎦⎤⎢⎣⎡--+-+=⎥⎦⎤⎢⎣⎡θθθθsin )cos (sin )cos (U X U E R U R U E X X X R 1I I d 0110q qd 21q d(17.8)功率角φ:θψϕ-=(13.9)输出电功率:ϕcos UI 3P 2=(13.10)输入机械功率:)(Fe Cua fw 21P P P P P +++= (13.11)式中P fw 、P Cua 、P Fe 分别为风摩损耗、电枢铜损和铁心损耗输入机械转矩:ω11P T =(13.12)ω为同步角速度rad/s13.1.1.2 电动机模型在图13.1, OM 所代表的矢量可表示为:)j j (aq 11X X R OM ++-=I U (13.5’)OM 所代表的矢量可用来确定E 0的位置。
WS04_Maxwell仿真永磁电机教程

ANSYS Maxwell v2014 培训教材
WS04-11
Maxwell v2014
模型细节 – Maxwell 外电路编辑器
Maxwell ASSM (BLAC) 模型
WS04
如果激励需要用外电路,则必须在Maxwell Circuit Editor中先创建一个外电路。 如果是通过RMxprt自动生成的有限元模型,则RMxprt也会同时生成一个外电路,例如 02_RMxprt_PWM Design,用户可以查看这个外电路的设置。 要查看这个新建的外电路,可以点击 Excitations -> External Circuit -> Edit External Circuit 在弹出的Edit External Circuit窗口中,点击Edit Circuit . . . 在Maxwell外电路编辑器中,选择View –> Fit Drawing
ANSOFT
Curve Info CoreLoss Setup1 : Transient
250
Moving1.Torque [NewtonMeter]
CoreLoss [W]
150
20.00
100
10.00
0.00
转矩
0.00 12.50 25.00 Time [ms] 37.50 50.00 62.50
40.00
20.00
Note: 用户可以调整电流初始值,以缩短 仿真达到稳定的时间。
Y1 [A]
0.00
-20.00
-40.00
电流
0.00 12.50 25.00 Time [ms] 37.50 50.00 62.50
-60.00
ANSYS Maxwell v2014 培训教材
同步电机永磁电机maxwell分析
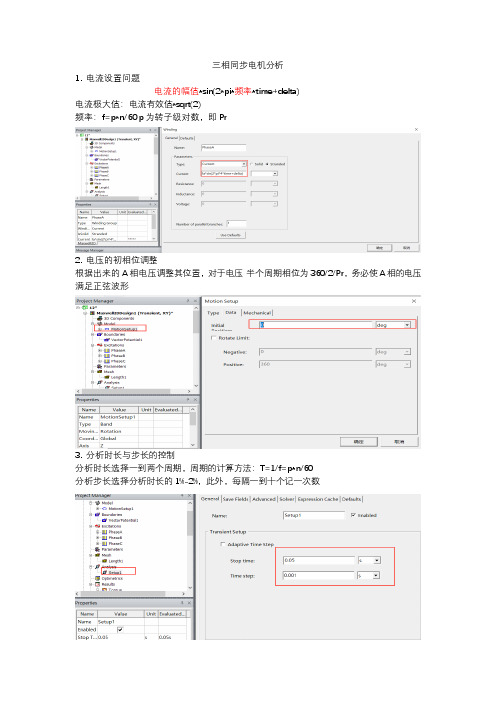
三相同步电机分析1. 电流设置问题电流的幅值*sin(2*pi*频率*time+delta)电流极大值:电流有效值*sqrt(2)频率:f=p*n/60 p为转子级对数,即Pr2. 电压的初相位调整根据出来的A相电压调整其位置,对于电压半个周期相位为360/2/Pr,务必使A相的电压满足正弦波形3. 分析时长与步长的控制分析时长选择一到两个周期,周期的计算方法:T=1/f=p*n/60分析步长选择分析时长的1%-2%,此外,每隔一到十个记一次数4. 基于坐标变换的交流磁场磁通密度的调整(-Moving1.Position -初始相位 * PI/180) * 极对数 + PI注意前面要加个负号5. 空载情况下的三个校核要点电流要为零+A相电压从零开始起步+Flux_q=0(磁通变化后)Flux-d是沿磁极正向的磁场强度,Flux-q是垂直于磁场方向的磁场强度,正常情况下,垂直于磁场方向应该为06. 删除现有的结果7. 负载要将电流初相位delta改为零,然后给电流的大小赋值8. 气隙磁密分布情况使用气隙中间的圆线作为参考面,使用场计算器计算B在中心面上的径向与切向分量在result中添加曲线可以在此处更改对应的时间9. 对气隙磁密进行傅里叶分解首先要进行坐标变化,把横坐标变成1,并且注意要用标准单位可以用鼠标划分局部显示傅里叶结果的横坐标是谐波极对数(频率),纵坐标是谐波幅值10. 网格划分问题可以通过画圆圈线手动加密气隙网格密度,画圈之后,将coverlines删除,将自动保留线画完曲线之后再画网格,并通过plotmesh查看11. 矢量场向量曲面积分计算问题在指定的曲线上,当需要插入函数的时候,先将变量以及加减乘除运算符先加上,然后使用积分函数integ 函数,需要注意的是,此处为矢量的线积分,要注意公式的转换·1,一般,极坐标积分可以提出一个r 出来,即:()r f d θθ∫在线积分时就变成了:()l f d θ∫。
Maxwell仿真永磁同步电机步骤

Ansoft Maxwell 14 永磁同步电机仿真步骤总结
首先是建立一个RMxprt文件,选择电机类型为下图的
Permanent-MagnetSynchronous Motor
只要按照下面的参数输入即可
磁钢材料NTP264H要自己定义
Danper是怎么出来的?要右键”Rotor’ ,选择 Insert Danper,就可以了
所有参数输入完毕,现在要定义个求解设置,右键“Analysis”添加一个setup,
模型
绕组的连接如下
求解结果
一键导入到maxwell14 2D瞬态场里去分析即可,右键Analysis setup 的creat Maxwell design ,auto setup 要打勾
导入模型如图,是1/4模型(导入整个模型的方法?加注fragnet 1)
因为是1/4模型,所以要设置一个 Symmetry Multiplier ,右键”model”,就可以看到,
设置如下
电机在零负载转矩的起动:点击“model”的树,将其展开,双击Motion setup 作如下设置
为了得到,更好的仿真图像,设置一下仿真时间,双击Solve setup 作如下设置
以下就是在零负载转矩的情况下的得出的各种起动时间图,横轴的时间单位是毫秒(ms)
做完了以上的仿真,再做一个电机在额定负载下的起动过程,把上面的文件复制一下,然
后改一下名称,结果如图然后双击负载的那个,改一个参数就可以,要改的参数,在motion setup里(上面有提到过的)将load Torque 设置成如下就可以,然后开始让电脑开始仿真(Analys all)
结果的图如下。
Maxwell仿真永磁同步电机步骤

Ansoft Maxwell 14 永磁同步电机仿真步骤总结
首先是建立一个RMxprt文件,选择电机类型为下图的
Permanent-MagnetSynchronous Motor
只要按照下面的参数输入即可
磁钢材料NTP264H要自己定义
Danper是怎么出来的?要右键”Rotor’ ,选择Insert Danper,就可以了
所有参数输入完毕,现在要定义个求解设置,右键“Analysis”添加一个setup,
模型
绕组的连接如下
求解结果
一键导入到maxwell14 2D瞬态场里去分析即可,右键Analysis setup 的creat Maxwell design ,auto setup 要打勾
导入模型如图,是1/4模型(导入整个模型的方法?加注fragnet 1)
因为是1/4模型,所以要设置一个Symmetry Multiplier ,右键”model”,就可以看到,设置如
下
电机在零负载转矩的起动:点击“model”的树,将其展开,双击Motion setup 作如下设置
为了得到,更好的仿真图像,设置一下仿真时间,双击Solve setup 作如下设置
以下就是在零负载转矩的情况下的得出的各种起动时间图,横轴的时间单位是毫秒(ms)
做完了以上的仿真,再做一个电机在额定负载下的起动过程,把上面的文件复制一下,然
后改一下名称,结果如图然后双击负载的那个,改一个参数就可以,要改的参数,在motion setup里(上面有提到过的)将load Torque 设置成如下就可以,然后开始让电脑开始仿真(Analys all)
结果的图如下。
maxwell软件- 自起动永磁同步电动机

11 自起动永磁同步电动机本章我们将简化RMxprt 一些基本介绍,以便介绍一些更高级的使用。
有关RMxprt 基本操作的详细介绍请参考第一部分的章节。
11.1基本理论同步电机定子绕组上输入三相正弦电压,在气隙中产生旋转磁场。
转子上的永久磁极力图与定子旋转磁场对齐,因而在转子上产生同步转矩。
起动时,转子上的阻尼绕组产生异步起动转矩,使其具有自起动能力。
自起动永磁同步电机的频域相量图如图11.1所示。
图 11.1 矢量图图11.1中,R 1、X d 、X q 分别为定子电枢的电阻、d 轴同步电抗和q 轴同步电抗。
aq1q ad 1d X X X X X X +=+=(11.1)上式中,X 1为电枢绕组漏电抗,X ad 和X ad 分别为d 轴电枢反应电抗和q 轴电枢反应电抗。
设力矩角为θ(相量E 0与相量U 的夹角),可导出⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-θθsin cos U E U I I X R R X 0q d q 11d (11.2)解得:⎥⎦⎤⎢⎣⎡+---+=⎥⎦⎤⎢⎣⎡θθθθsin )cos (sin )cos (U X E U R U R E U X X X R 1I I d 0110q qd 21q d (11.3)设相量I 与相量E 0的夹角为ψ:qd1I I -=tan ψ (11.4)功率因数角φ(相量I 与相量U 的夹角)为:ψθϕ+=(11.5)输入电功率为:ϕcos UI 3P 1=(11.6)输出机械功率为:)(Fe Cu fw 12P P P P P ++-= (11.7)式中P fw , P Cu , 和P Fe 分别为风摩损耗、电枢铜损和铁心损耗 输出机械转矩为:ω22P T =(11.8)式中ω为同步角速度rad/s ).电机效率为:%100P P 12⨯=η(11.9)电机的起动方式与感应电机相同,即借助于转子上的鼠笼绕组(在此称为阻尼绕组)产生起动力矩。
最新maxwell后处理永磁体退磁仿真步骤及设置

1、正确建立电机模型,并加额定负载运行。
12、在永磁体外弧画一条与永磁体外弧一致的曲线如图1。
2343、在后处理中设置如图2。
其中Polhline1为上步中画线的名称。
53、得到的曲线如图3。
674、求解永磁体平均磁场强度。
在后处理中设置。
89第一栏是选择要分析的量,mag H(B/J) 磁场强度,磁感应强度,电流密度的绝对值大小用来画云图的,H(B/J) Vector为它们的矢量,用来画矢量1011图。
后面几项没有用过,不知道具体干什么用的。
12第二栏是画图所用的几何模型,比如surface xy就是在xy片面上话图。
13Volume –all就是在所有的体上画图。
Animsurf xy则是在xy平面做动画。
14注意,一些量不能在体上显示,如果选择体,会弹出警告。
15第三栏是所显示的为哪个组件上的H(B/J)的值。
画出的云图和矢量图可以通过双击颜色标度栏,打开并设置一些显示参1617数,包括取值范围,颜色,箭头的大小和密度等,以大到最好的显示效果。
18Plot—〉Visibility可以控制当前显示的内容。
Plot—〉Delete 删除已19经建立出的后处理表达式。
还可以通过 Plot—〉save as将化出的云图保20存为.dsp文件。
21Plot—〉field的操作比较简单,但是它只能给出最基本的几个量,局限22性比较大。
用Calculator 可以实现它里面所有的功能,而且可以扩展到其23它的量的计算。
下面具体介绍一下Calculator中各个按钮的作用。
把显示区域当作一个堆2425栈来操作。
最上为栈顶,最下为栈底。
26Push:将当前栈顶信息重行操作一遍,放在栈顶。
2728Pop:将栈顶操作出栈。
29RlDn:将栈内的操作向下循环。
30RlUp:将栈内的操作向上循环。
31Exch:将栈顶的两条语句交换位置。
32Clear:清空栈内的内容。
Undo:撤销操作。
3334Input:输入,获得一些基本的数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
为了得到,更好的仿真图像,设置一下仿真时间,双击
Solve setup 作如下设置
以下就是在零负载转矩的情况下的得出的各种起动时间图,
横轴的时间单位是毫秒( ms)
做完了以上的仿真,再做一个电机在额定负载下的起动过程,把上面的文件复制一下
,然
后改一下名称,结果如图 那个,改一个参数 setup 里(上面有提到过的)将 load
Torque 设置成如下 就可以,然后开始让电脑开始仿真( Analys all)
结果的图 如下
所有参数输入完毕,现在要定义个求解设置,右键“
Analysis”添加一个 setup ,
模型 绕组的连接如下
求解结果
一键导入到 maxwell14 2D 瞬态场 里去分析即可,右键 Analysis setup 的 creat Maxwell design , auto setup 要打勾
Ansoft Maxwell 14 永磁同步电机仿真 步骤总结
首先是建立一个 RMxprt 文件,选择电机类型为下图的 Permanent-MagnetSynchronous Motor
只要按照下面的参数输入即可
磁钢材料 NTP264H 要自己定义
Danper 是怎么出来的 ?要右键 ”Rotor ’,选择 Insert Danper ,就可以了
导入模型如图,是 1/4 模型( 导入整个模型的方法? 加注 fragnet 1 ) 因为是 1/4 模型 ,所以要设置一个 Symmetry Multiplier ,右键 ”model ”,就可以看到, 设置如
下 电机在零负载转矩的起动:点击“ model ”的树,将其展开,双击 Motion setup 作如下设置