【飞机系统PPT课件】自动飞行:飞行指引仪_自动驾驶仪
《飞机飞行控制》课件

02
人机界面必须设计得简单、直观、易操作,使飞行员能够快速
地获取飞行状态信息并发出控制指令。
人机界面也是飞行员紧急情况下进行人工操纵的通道,必须保
03
证在任何情况下都能迅速有效地发挥作用。
飞行控制系统的基
03
本原理
飞行动力学基础
飞行动力学是研究飞 行器在气动力作用下 的运动规律的科学。
飞行动力学主要研究 飞行器的飞行性能, 包括稳定性和操纵性 。
飞行控制系统硬件
飞行控制系统硬件是实现飞行控制功能的物理设备,包括传感器、控制 器、执行器等。
传感器用于检测飞机的状态参数,如姿态、速度、高度和角速度等;控 制器用于处理传感器信号并计算出控制指令;执行器用于接收控制指令
并操纵飞行控制面。
飞行控制系统硬件必须具有高可靠性和高精度性,以确保飞行的安全和 稳定。
调查结论
调查报告认为,波音公司在MCAS的设计和认证过程中存在严重失误,
同时美国联邦航空局(FAA)也未能有效监管。
波音737 MAX的飞行控制系统简介
飞行控制系统
波音737 MAX的飞行控制系统包括自动驾驶系统、飞行指引系统、机动特性增强系统等 。
MCAS系统
MCAS系统是一种自动防失速系统,旨在防止飞机机翼上的失速。当传感器检测到机翼上 的气流分离时,MCAS会自动调整机头的角度以减少机翼的失速。
它以空气动力学为基 础,研究飞行器在空 气中运动的力学规律 及其应用。
飞行控制系统的工作原理
飞行控制系
它通过接收飞行员输入的指 令,经过处理后发送控制指 令给执行机构,使飞行器按 照预定的轨迹和姿态飞行。
飞行控制系统通常由传感器、 控制器和执行机构三部分组成
飞行控制系统的历史与发展
【飞机系统PPT课件】自动飞行FCU:飞行控制组件
高度的选择是通过旋转高度选择旋钮完成的。 转动高度选择旋钮,窗口中的设定值就改变。
MENU
该旋钮实际上是两个不同的选择器。 内圈用于设置窗口中的高度,外圈用于改变 高度变化量。 高度的增/减量可以有两个值:100英尺或 1000英尺。
MENU
现在准备起飞… 单击前进箭头开始起飞滑跑。
MENU
FCU显示窗中的HDG-V/S或TRK-FPA字样明确地 指示出了当前的选择。
请将航向-垂直速度方式改为航迹-飞行航迹角方式。
MENU
航向-垂直速度/航迹-飞行航迹角(HDG-V/S/TRKFPA)按钮用来切换航向-垂直速度方式和航迹-飞行 航迹角方式。
FCU显示窗中的HDG-V/S或TRK-FPA字样明确地 指示出了当前的选择。
转动 : 改变高度 压入 : 恢复垂直剖面 拉出 : 忽略垂直剖面
MENU
在EIS一章中我们已经学习了公制高度按钮。 在此我们提醒你,该按钮按入后,在ECAM系 统显示页面上的固定数据区将以米为单位显示 选择的高度。
MENU
我们现在来看一下垂直速度-飞行航迹角部分。
垂直速度-飞行航迹角选择旋钮有三个功能: 转动旋钮,用来改变垂直速度或飞行航迹角, 按入旋钮,使飞机立即改平, 拉出旋钮,选择垂直速度或飞行航迹角方式。
请拉出垂直速度-飞行航迹角选择旋钮。
MENU
为了设置一个值,首先拉出垂直速度-飞行航迹 角选择旋钮。
不对,请单击垂直速度-飞行航迹角选择旋钮。
为了设置一个值,首先拉出垂直速度-飞行航迹 角选择旋钮。
不对,请单击垂直速度-飞行航迹角选择旋钮。
一旦垂直速度-飞行航迹角选择旋钮被拉出,垂直 速度-飞行航迹角窗口就显示当前的垂直速度或飞行 航迹角。
自动驾驶飞行指引系统幻灯片PPT

A /P E N G A G E
L CR
C M DC M DC M D F /D O N
H O L D A P P
D IS E N G A G E O F F
Figure 3.9
Civil Aviation Flight University of China
4
AFDS Mode Control Panel
A fault in an engaged autopilot may also cause a disconnect.
A utopilot D isconnect Sw itch
Figure 3.10
PULL UP C A B IN
A LT AUTO P IL O T FMC
A /P D IS C
Armed and engaged selections are displayed on the ADI, with armed selections usually shown in white or amber, and engaged modes in green.
A /TA R M IA S /M A C H
In a modern system, it is normal for the AFDS to contain a separate FD computer that provides display instructions to the EFIS system, and the same instructions to the autopilot computer, which then converts the signals to appropriate commands for the servos.
自动飞行控制系统PPT课件
远前方的大。若迎面气流速度逐渐增大,则翼面上流速的最大值也会增大,该处的温度则要降低,因而音
速也降低。当迎面气流的速度达到某一值时,翼面上最大速度处的流速等于当地音速,此时我们把远前方的
迎面气流速度 与远前方的空气音速
M
之
cr
比 ,定义为该机的临界马赫数
。
a
18
V
第18页/共92页
Mcr
第二节 空气动力学的基本知识
路;其作用是稳定与控制飞机姿态。 • 控制(制导)回路:由稳定回路加上飞机轨迹反馈元件、放大计算装置组成飞机轨迹自动驾驶仪,并与飞
机形成的回路;其作用是稳定与控制飞机轨迹。
8
第8页/共92页
第一章 飞行原理
• 飞机控制系统的核心问题是研究由控制系统和飞行器组成的闭合回路的静、动态性能,为此必须建立控制 系统和飞行器的数学模型,其形式可以是微分方程、传递函数或状态空间表达式等。
4
第4页/共92页
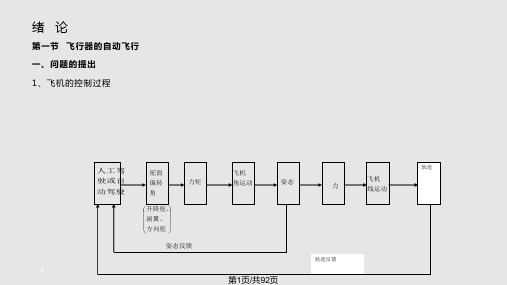
第一节 飞行器的自动飞行
二、控制面 1、控制飞行器的目的是改变飞行器的姿态或空间位置,并在受干扰情况下保持飞行器的
姿态或位置。因而必须对飞行器施加力和(或)力矩,飞行器则按牛顿力学定律产生运动。 2、作用于飞行器而与控制有关的力和力矩主要是偏转控制面(即操纵面)产生的空气动
力和力矩。一般飞机有三个控制面:升降舵、方向舵和副翼。 3、由于航空技术的发展,仅靠改善飞机的气动布局和发动机的性能难以达到对飞机性能
V a
19
Vmax a
第19页/共92页
第二节 空气动力学的基本知识
• 飞机飞行速度的范围划分如下:
• 飞行马赫数 为飞行速度与远前方空气音速之比,
时为低速飞行;
为亚音速飞行;
飞行操纵ppt课件
❖ 软式传动机构
钢索 滑轮 扇型轮/扇型摇臂 松紧螺套 钢索张力补偿器
传动机构特点比较
类型 优点
软式 构造简单
传动 尺寸较小
机构
重量较轻 比较容易绕过机内设备
硬式 刚度较大
传动
铰接点用滚珠轴承减小摩 擦力,并消除间隙
机构 具有较佳的操纵灵敏度
缺点
刚度较小 弹性间隙 操纵灵敏度差 钢索在滑轮处容易磨损
构造复杂 重量加大 难于“绕”过机内设备 易与发动机发生共振
混合 兼有硬式和软式的优点和缺点
钢索
只承受拉力,不能承受压力 用两根钢索构成回路,以保证舵面能在两
个相反的方向偏转
钢索构造和规格
❖ 规格型号
❖
7×7
股数
❖
7×19
钢丝数
钢索构造和规格
❖ 类型
碳钢、不锈钢
❖ 尺寸
1/16到3/8英寸 名义直径相同的钢索,股数越多,它的柔性越好;
❖ 变松将发生弹性间隙,过 紧将产生附加摩擦
❖ 钢索张力补偿器的功用是 保持钢索的正确张力
1.传动杆
硬式传动机构中的操纵力由传动杆传递,传动杆 可承受拉力和压力
传动杆的刚度较大 可调接头
❖调整接头端部有检查小孔,把传动杆调长时,接头螺 杆的末端不应超过小孔的位置
失效形式——失稳
2. 摇臂
❖材料:硬铝 ❖特点:在连接处装有轴承 ❖分类:单摇臂/双摇臂/复摇臂
方向舵操纵钢索
脚蹬
脚蹬位置调整
手操纵机构与脚操纵机构的匹配
驾驶杆
驾驶盘
平 平放式脚蹬为了取得较大的
放 操纵力臂,两脚蹬之间距离 式 较大
脚 蹬
与左右活动范围较大的驾驶 杆配合使用
《民航飞机自动飞行控制系统》教学课件—06飞行指引仪系统

飞行指引仪系统第六章目 录CONTENTS 1飞行指引仪系统的组成3飞行姿态指引系统的使用飞行姿态指引系统的工作原理2飞行指引仪系统的组成第1节1 飞行指引仪系统的组成Ø不同型号的飞行指引仪系统组成略有不同。
通常,飞行指引仪系统由飞行指引计算机、姿态指引指示器、指引放大器、方式控制板、飞行方式通告牌等部件组成。
1.1 飞行指引计算机Ø飞行指引计算机(Flight Director Computer,FDC)是飞行姿态指引仪的核心部件。
它为姿态指引仪提供飞机的俯仰和横侧指令、故障旗收放指令和飞行指引通告牌指示。
Ø在某些飞机上,飞行指引计算机是单独的;在另一些飞机上,飞行指引计算机是与自动驾驶仪的计算机合为一体的,称为飞行控制计算机。
Ø姿态指引指示器是飞机姿态指示与飞机姿态指引的综合指示器。
为了便于驾驶员观察飞机上其他设备的指示,指示器内也综合有其他信息显示,如无线电高度表的指示、仪表着陆系统的指示等。
Ø飞行姿态指引指示器目前使用的有 3 种:ü机电式姿态指引指示器 ADI;ü电子姿态指引指示器 EADI:ü主飞行显示器。
带十字形和带八字形指引杆的姿态指引仪的指引信号Ø飞行指引的控制板用于驾驶员接通/断开飞行指引系统以及选择飞行指引的方式。
不同型号的飞行指引仪,其控制板也不同。
但总体来说,都具有飞行指引仪接通/断开电门和飞行指引仪方式选择电门。
Ø AP 接通电门(AP ENG)ü按下,如果接通的条件满足,就可以接通 AP;再按,断开 AP。
ØFD 接通电门(FD)ü按下,如果接通的条件满足,就可以接通 FD。
再按,断开 FD。
ØFD 的方式选择钮ü按下某一按钮,选择 FD 的指引方式。
不同的飞行指引仪其指引方式不同。
总体来说,将指引方式分为两大类,其中的一大类用于俯仰姿态的指引,另外一大类用于飞机横滚姿态的指引。
飞机飞行控制课件

添加标题
添加标题
控制过程:通过传感器获取数据, 计算控制量,输出到执行机构,实 现对飞机的控制
飞机飞行控制系统的硬件组成
飞行控制系统的主要硬件设备
飞行控制计算机:负责处 理飞行控制指令和飞行数 据
传感器:包括加速度计、 陀螺仪、高度计等,用于 测量飞机的姿态、速度、 高度等参数
执行机构:包括舵机、电 动机、液压泵等,用于执 行飞行控制指令
飞行控制系统的功能
控制飞机的飞行姿态和速度
确保飞机的安全性和舒适性
添加标题
添加标题
保持飞机的稳定性和操纵性
添加标题
添加标题
提高飞机的飞行效率和性能
飞机飞行控制系统的工作原理
飞行控制系统的基本原理
飞机飞行控制系统主要由传感 器、执行器和控制器组成
传感器负责收集飞机的各种飞 行参数,如速度、高度、姿态 等
环境适应性:设计 适应各种恶劣环境 的硬件,如高温、 低温、振动等
维护与升级:定期 维护和升级硬件, 确保系统始终处于 最佳工作状态
飞机飞行控制系统的软件设计
飞行控制系统软件的功能和特点
飞行控制系统软 件是飞机飞行控 制的核心部分, 负责控制飞机的 飞行姿态、速度 和高度等参数。
飞行控制系统软 件具有高度的可 靠性和稳定性, 能够保证飞机在 各种飞行条件下 的安全飞行。
通信设备:包括无线电、 卫星通信等,用于传输飞 行控制指令和飞行数据
显示设备:包括显示器、 指示灯等,用于显示飞行 状态电力支持
飞行控制系统硬件的连接方式
传感器:用于检测 飞机的飞行状态和 参数
计算机:用于处理 传感器数据,生成 控制指令
飞行控制系统包括自动驾驶仪、飞行控制计算机、传感器、执行机构等 部分。 飞行控制系统的主要功能包括姿态控制、航向控制、高度控制、速度控 制等。 飞行控制系统是飞机安全飞行的重要保障,也是现代飞机的重要标志之 一。
21-A320自动飞行系统飞行指引仪-自动驾驶
FMGC飞行制导自动驾驶仪指令在该模块中我们将回顾如何接通和断开自动驾驶仪(自动驾驶仪ON/OFF),以及飞行指引仪(飞行指引仪ON/OFF)。
你是机长并且是把杆驾驶员…现在刚刚离地,距地面100英尺。
为了减轻飞行员的工作负担,加强飞机安全性,让我们接通一部自动驾驶仪。
请接通1号自动驾驶仪。
现在刚刚离地,距地面100英尺。
为了减轻飞行员的工作负担,加强飞机安全性,让我们接通一部自动驾驶仪。
不对,接通1号自动驾驶仪。
现在刚刚离地,距地面100英尺。
为了减轻飞行员的工作负担,加强飞机安全性,让我们接通一部自动驾驶仪。
不对,用AP 1按钮接通1号自动驾驶仪。
FMA证实了1号自动驾驶仪已经接通。
通常当机长是把杆驾驶员时,使用1号自动驾驶仪。
当仪副驾驶时把杆驾驶员时,使用2号自动驾驶仪。
这确保在同一时刻,只有一部自动驾驶仪处于工作状态。
自动驾驶仪在飞机离地(5秒钟)后就可使用,从大约离地100英尺开始一直可用到着陆滑跑。
在大多数情况下,同一时刻只能接通一部自动驾驶仪。
但是,在使用盲降自动进近时,两部自动驾驶仪可同时接通。
这将为完成自动着陆、自动滑跑或低高度复飞提供最佳的系统安全裕度。
因此,一旦获得盲降进近的许可,飞行员就可按下进近按钮以待命航道和下滑道;然后可以接通第二部自动驾驶仪。
请接通2号自动驾驶仪。
但是,在使用盲降自动进近时,两部自动驾驶仪可同时接通。
这将为完成自动着陆、自动滑跑或低高度复飞提供最佳的系统安全裕度。
因此,一旦获得盲降进近的许可,飞行员就可按下进近按钮以待命航道和下滑道;然后可以接通第二部自动驾驶仪。
不对,接通2号自动驾驶仪。
但是,在使用盲降自动进近时,两部自动驾驶仪可同时接通。
这将为完成自动着陆、自动滑跑或低高度复飞提供最佳的系统安全裕度。
因此,一旦获得盲降进近的许可,飞行员就可按下进近按钮以待命航道和下滑道;然后可以接通第二部自动驾驶仪。
不对,使用AP 2按钮接通2号自动驾驶仪。
FMA证实了两部自动驾驶仪已全都处于接通状态以及由此达到的系统裕度(DUAL)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FMA证实了两部自动驾驶仪已全都处于接通状态以及由此达到的系统裕度 (DUAL)。这将指令可能的最低决断高度。你将在“制导方式”模块中更为 详细地了解这一点。
现在我们来学习一下如何断开自动驾驶仪。
MENU
你现在正在作自动进近。当看到跑道时,你决定人工操纵。 按下侧杆上红色的自动驾驶仪脱开按钮以断开自动驾驶仪。该按钮也 称接替按钮。
因此,一旦获得盲降进近的许可,飞行员就可按下进近按钮以待命航道和下滑道;然后可 以接通第二部自动驾驶仪。
不对,接通2号自动驾驶仪。
但是,在使用盲降自动进近时,两部自动驾驶仪可同时接通。这将为完成自动着陆、自动 滑跑或低高度复飞提供最佳的系统安全裕度。
因此,一旦获得盲降进近的许可,飞行员就可按下进近按钮以待命航道和下滑道;然后可 以接通第二部自动驾驶仪。
MENU
现在刚刚离地,距地面100英尺。为了减轻飞行员的工作 负担,加强飞机安全性,让我们接通一部自动驾驶仪。
不对,接通1号自动驾驶仪。
现在刚刚离地,距地面100英尺。为了减轻飞行员的工作 负担,加强飞机安全性,让我们接通一部自动驾驶仪。
不对,用AP 1按钮接通1号自动驾驶仪。
FMA证实了1号自动驾驶仪已经接通。 通常当机长是把杆驾驶员时,使用1号自动驾驶仪。当仪副驾驶时把杆驾驶 员时,使用2号自动驾驶仪。这确保在同一时刻,只有一部自动驾驶仪处于工 作状态。自动驾驶仪在飞机离地(5秒钟)后就可使用,从大约离地100英尺开 始一直可用到着陆滑跑。 在大多数情况下,同一时刻只能接通一部自动驾驶仪。
MENU
1号飞行指引仪已接通。1号PFD 上显示十字指令杆;两个PFD上的FMA都显示: FD接通状态为“1FD-”,意味着只有1号飞行指引仪接通, 与1号飞行指引仪相对应的方式。
注意EFIS控制面板上的FD 1按钮变为绿色。 现在让我们来接通副驾驶的飞行指引仪。 注意:当自动驾驶仪和飞行指引仪都关断时,你重新将它们接通,它们将处于垂直速度和航 向这两种“基本”方式。
MENU
但是,在使用盲降自动进近时,两部自动驾驶仪可同时接通。这将为完成自动着陆、自动 滑跑或低高度复飞提供最佳的系统安全裕度。
因此,一旦获得盲降进近的许可,飞行员就可按下进近按钮以待命航道和下滑道;然后可 以接通第二部自动驾驶仪。
请接通2号自动驾驶仪。
MENU
但是,在使用盲降自动进近时,两部自动驾驶仪可同时接通。这将为完成自动着陆、自动 滑跑或低高度复飞提供最佳的系统安全裕度。
MENU
现在两部飞行指引仪都已接通;2号PFD上显示十字指令杆。两个FMA都指示: FD的接通状态为“1FD2”,意味着两部飞行指引仪都接通, 相应一侧的飞行指引制导方式。
注意EFIS控制面板上的FD 2按钮变为绿色。
通常而言:应该同时接通或断开两部飞行指引仪。
MENU
我们来回顾一下飞行指引符号。十字指令杆包括两个独立的指令杆, 它们以飞机姿态符号作为基准: 水平指令杆指示俯仰指令, 垂直指令杆指示横滚指令。
MENU
在一条装备有盲降台的跑道上起飞和着陆滑跑时,横滚指令杆 将被一个偏航指令杆代替。偏航指令杆帮助飞行员在低能见的情 况下在地面上精确地跟踪航道信标。
MENU
在EFIS模块中我们已经学过FD十字指令杆的原理。我们 现在来看一下另一个飞行指引仪符号。
MENU
我们已经看过了以飞机姿态符号作为基准的飞行指引仪十字指令杆。 另一种飞行指引符号以飞行航迹矢量(FPV)或小鸟作为基准。通过按下 FCU上的航向-垂直速度/航迹-飞行航迹角按钮可以接通或关闭PFD上的小 鸟显示。
请单击航向-垂直速度/航迹-飞行航迹角按钮。
MENU
我们已经看过了以飞机姿态符号作为基准的飞行指引仪十字指令杆。 另一种飞行指引符号以飞行航迹矢量(FPV)或小鸟作为基准。通过按下 FCU上的航向-垂直速度/航迹-飞行航迹角按钮可以接通或关闭PFD上的小 鸟显示。
不对,单击航向-垂直速度/航迹-飞行航迹角按钮。
MENU
FMA显示两部自动驾驶仪都断开;进近能力降为1类。 FCU上的两个自动驾行制导
自动驾驶仪指令
飞行指引仪指令
飞行制导仍然驱动PFD上的飞行指引仪符号。 飞行指引仪(FD)帮助飞行员精确地控制飞机沿着给定阶段的飞行轨迹飞行。 飞行指引仪根据FCU上所选择的制导方式和目标向飞行员提供制导指令。这些指令用特殊 的符号(如十字指令杆)表示。
当某一部飞行指引仪接通时,相应按钮上的绿条亮。 这里,两部飞行指引仪都已接通;让我们把它们关断。
MENU
当左座或右座按下他的FD按钮后: PFD上的FD指令杆消失, FMA上的FD接通状态消失, FD按钮上的绿灯熄灭。
MENU
注意我们已经为你断开了1号自动驾驶仪。 当自动驾驶仪和飞行指引仪都关断时,除自动推力外(这里为马赫方式 ),FMA上的所有方式区域都变成空白。 现在让我们重新接通飞行指引仪。假设机长先按下他的FD按钮,然后是 副驾驶。
我们已经看过了以飞机姿态符号作为基准的飞行指引仪十字指令杆。 另一种飞行指引符号以飞行航迹矢量(FPV)或小鸟作为基准。通过按下 FCU上的航向-垂直速度/航迹-飞行航迹角按钮可以接通或关闭PFD上的小 鸟显示。
不对,单击突出显示的按钮。
MENU
飞行指引符号显示在两个PFD上。1号PFD 上的符号由1号飞行制导驱动,2号 PFD 上的符号由2号飞行制导驱动。
飞行指引仪的接通状态显示在FMA上。 在这里,飞行指引符号称为十字指令杆,它以飞机姿态符号(
)作为基准。
MENU
使用位于任一EFIS控制面板上的FD按钮接通或断开相应的 飞行指引仪。
MENU
FMGC 飞行制导
自动驾驶仪指令
在该模块中我们将回顾如何接通和断开自动驾驶仪(自动驾驶仪ON/OFF),以及飞行指 引仪(飞行指引仪ON/OFF)。
你是机长并且是把杆驾驶员…
MENU
现在刚刚离地,距地面100英尺。为了减轻飞行员的工作 负担,加强飞机安全性,让我们接通一部自动驾驶仪。
请接通1号自动驾驶仪。